Изобретение относится к измерительным приборам, выполняющим измерения с помощью оптических и электрических средств. Может быть использовано для контроля угловой скорости вращения, угловых перемещений и поворота механизмов, преимущественно для автономного измерения угловых перемещений и скорости в экстремальных условиях, например при производстве буровых работ.
Известен электронно-оптический тахометр [1]. Недостатком известного тахометра является высокое энергопотребление и низкая экономичность, сложность конструкции, затрудняющая изготовление и эксплуатацию, низкие помехоустойчивость и достоверность результатов измерения, отсутствие возможности измерять угловое перемещение. Эти недостатки делают невозможным применение известного устройства [1] для автономного измерения угловых перемещений и скорости в экстремальных условиях, например при производстве буровых работ.
Известен датчик скорости вращения [2]. Недостатком датчика [2] является высокое энергопотребление и низкая экономичность, сложность конструкции, затрудняющая изготовление и эксплуатацию, низкая помехоустойчивость и достоверность результатов измерения, отсутствие возможности измерять угловое перемещение. Эти недостатки делают невозможным применение известного устройства [2] для автономного измерения угловых перемещений и скорости в экстремальных условиях, например в качестве оборудования при производстве буровых работ для добычи нефти.
Известен датчик оборотов лебедки типа ICS SR 0004 [3]. Недостатком датчика [3] является высокое энергопотребление, наличие в конструкции чувствительных к внешним электромагнитным полям элементов конструкции датчика, что делает датчик уязвимым к влиянию помех. Кроме того, датчик оборотов обладает недостаточной разрешающей способностью и сложным креплением, затрудняющим эксплуатацию. Эти недостатки делают невозможным применение известного устройства [3] для автономного измерения угловых перемещений и скорости в экстремальных условиях, например в качестве измерительного оборудования при производстве буровых работ для добычи нефти.
Наиболее близким аналогом по существу заявляемого изобретения, прототипом, является датчик положения талевого блока типа ДОЛ-5 [4]. Датчик предназначен для измерения углового перемещения вала буровой лебедки и соответствующего ему перемещения талевого блока с целью определения следующих параметров: положения крюка над столом ротора; глубины скважины; положения инструмента или обсадных труб над забоем; скорости бурения и СПО. Датчик оборотов лебедки используется в составе станции геолого-технологических исследований скважин (далее - ГТИ). ГТИ и в системе контроля параметров бурения "Контур"
Датчик ДОЛ-5 состоит из измерительного блока, смонтированного в пазу монтажной станины, и комплекта шкивов с клиновыми ремнями. Измерительный блок содержит цилиндрический корпус с подшипниковым узлом, на внутренней крышке которого смонтированы два инфракрасных преобразователя фирмы Honeywell. На одной части вала подшипникового узла закреплен диск, проходящий через пазы инфракрасных преобразователей, и перфорированный по краям прямоугольными щелями. На другой части вала смонтирован шкив клиноременный передачи. Внутри корпуса измерительного блока установлена плата со стабилизатором тока и выходными ключами.
Датчик устанавливается на основании кожуха буровой лебедки со стороны входа пневматической линии привода тормозной системы и сообщается с валом лебедки клиновым ремнем. Принцип действия датчика оборотов лебедки ДОЛ-5 основан на преобразовании угловых перемещений вала буровой лебедки в двухфазный электрический сигнал, пропорциональный числу оборотов и зависящий от направления движения вала.
Недостатками датчика ДОЛ-5 являются:
- привязанность проводами к внешнему источнику электропитания,
- высокое энергопотребление, недостаточная разрешающая способность вследствие использования датчика с малой разрешающей способностью (35 импульсов на 1 оборот).
Эти недостатки делают невозможным применение известного устройства [4] для точного измерения угловых перемещений и скорости в автономных устройствах и в экстремальных условиях, например - в контрольно-измерительном оборудовании при производстве буровых работ.
Целью заявленного технического решения являются:
- устранение привязанности датчика к внешнему источнику электропитания,
- снижение энергопотребления,
- повышение разрешающей способности датчика за счет использования датчика с высокой разрешающей способностью (вместо 35 импульсов на 1 оборот используется не менее 128 импульсов на 1 оборот).
- снижение энергопотребления за счет использования импульсного источника питания, примененного в совокупности с другими признаками заявленного устройства,
- обеспечение автономности эксплуатации датчика за счет применения встроенного источника электропитания,
- повышение разрешающей способности и достоверности результатов измерения датчика за счет использования комплектующих, имеющих большую разрешающую способность,
- повышение стабильности работы устройства за счет применения совокупности заявленных признаков.
Таким образом в целом цели достигают за счет того, что используют датчик угловой скорости и угловых перемещений, содержащий автономный источник электропитания, преобразователь напряжения, модулятор питания, программируемую логическую интегральную схему с запрограммированным алгоритмом управления, модулятор питания и датчик оборотов, связанные между собой электрическими соединениями. Питающее электрическое напряжение подают на преобразователь напряжения, стабилизируют, стабилизированное напряжение подают на программируемую логическую интегральную схему и модулятор питания, в программируемой логической интегральной схеме генерируют первично модулированный сигнал. Первично модулированный сигнал от программируемой логической интегральной схемы подают в модулятор питания, где производят модуляцию напряжения питания от преобразователя поступающим из программируемой логической интегральной схемы первично модулированным сигналом. Выработанное модулятором питания, модулированное сигналом из программируемой логической интегральной схемы напряжение подают в датчик оборотов. В датчике оборотов первично модулированное напряжение преобразуют в первично модулированный световой поток, этот световой поток вторично модулируют, пропуская световой поток через щели барабана, приводимого во вращение объектом измерения. Прошедший через щели вторично модулированный световой поток преобразуют фотоприемником во вторично модулированный электрический сигнал, этот сигнал подают в программируемую логическую интегральную схему, где по заданному алгоритму производят расчет угловой скорости, угловых перемещений и частоты первично модулированного сигнала, результаты расчета выводят на регистрирующее и показывающее устройство. В датчике угловой скорости и угловых перемещений используют автономный источник электропитания.
Сущность заявленного решения заключается в следующем. Датчик угловой скорости и угловых перемещений содержащий автономный источник электропитания, преобразователь напряжения, модулятором питания, датчик оборотов характеризуется тем, что датчик угловой скорости и угловых перемещений дополнительно оснащен программируемой логической интегральной схемой с запрограммированными алгоритмом диагностики узлов датчика и алгоритмом управления модулятором питания, связанным с датчиком оборотов электрическими соединениями, по которым подается модулированное питающее напряжение на датчик оборотов, способ работы датчика по п.1 характеризуется тем, что в программируемой логической интегральной схеме генерируют первично модулированный сигнал, при этом первично модулированный сигнал от программируемой логической интегральной схемы подают в модулятор питания, где производят модуляцию напряжения питания от преобразователя поступающим из программируемой логической интегральной схемы первично модулированным сигналом, выработанное модулятором питания, модулированное сигналом из программируемой логической интегральной схемы напряжение подают в датчик оборотов, в котором первично модулированное напряжение преобразуют в первично модулированный световой поток, этот световой поток вторично модулируют, пропуская световой поток через щели барабана, приводимого во вращение объектом измерения, прошедший через щели вторично модулированный световой поток преобразуют фотоприемником во вторично модулированный электрический сигнал, этот сигнал подают в программируемую логическую интегральную схему, где по заданному алгоритму производят расчет угловой скорости, угловых перемещений и частоты первично модулированного сигнала, результаты расчета выводят на регистрирующее(ие) и показывающее(ие) устройство(а), при этом программируемая логическая интегральная схема при запуске выполняет диагностику узлов датчика, при выполнении диагностики, тестируемые узлы выдают контрольные показатели, полученные показатели тестируемых узлов сравниваются с эталонными показателями этих узлов, при совпадении этих показателей, результат диагностики является положительным, при несовпадении показателей, датчик признается не работоспособным.
Заявленное техническое решение поясняется фигурами, на Фиг.1 приведена блок-схема заявляемого изобретения, на Фиг.2 приведена блок-схема программы управления работы датчика угловой скорости и угловых перемещений в целом, на Фиг.3 приведена конструкция датчика оборотов, на Фиг.4 приведен оптический сенсор.
Заявляемое изобретение осуществляют, например, следующим путем.
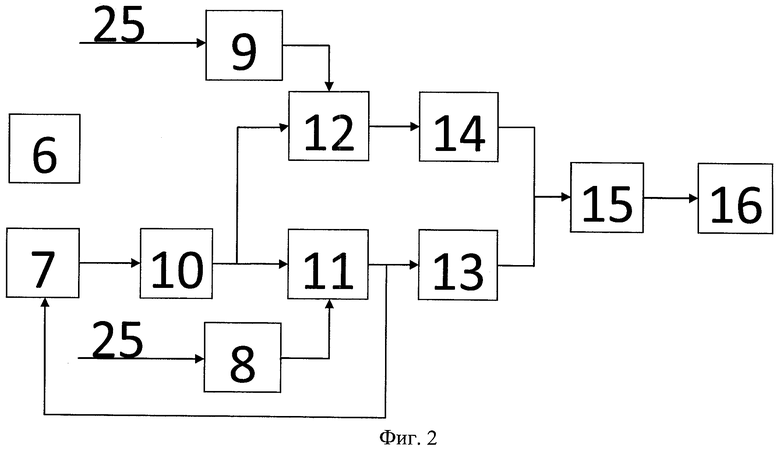
На фиг.1 приведена блок-схема заявляемого изобретения с указанием его отдельных узлов и электрических соединений, при этом стрелки указывают направление движения сигналов между узлами, где под позицией 1 - приведен источник электропитания (далее по тексту ИП), 2 - преобразователь напряжения (далее по тексту ПН), 3 - программируемая логическая интегральная схема (далее по тексту ПЛИС), 4 - модулятор питания (далее по тексту МП), 5 - датчик оборотов (далее по тексту ДО).
Источник электропитания 1 является автономным источником постоянного напряжения, например - состоящим из двух стандартных литий тионилхлоридных элементов питания с общим номинальным напряжением 7,2 В.
Преобразователь напряжения (ПН) 2 содержит преобразователи, изменяющие напряжение источника электропитания 1 до напряжения, необходимого для питания отдельных узлов устройства, например до напряжения - 5 вольт.
Программируемую логическую интегральную схему (ПЛИС) 3 выбирают с минимально возможным энергопотреблением, например - типа MAX II EPM570GT100I5N фирмы Altera [5].
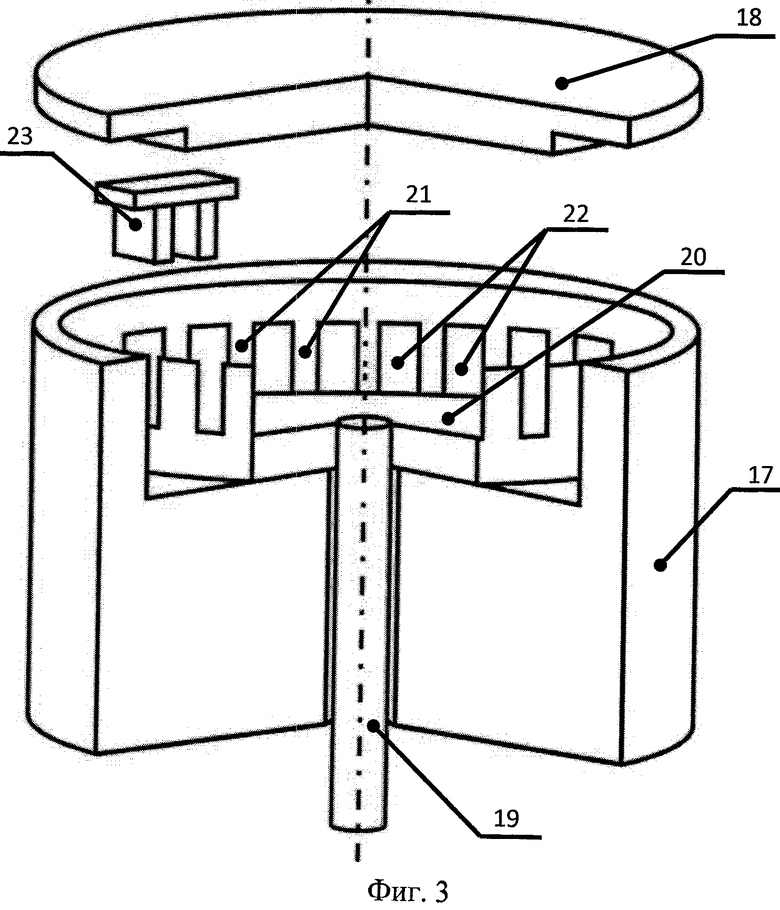
В ПЛИС в дальнейшем вводят («прошивают») программу управления заявляемым устройством. Блок-схема программы управления представлена на Фиг.2.
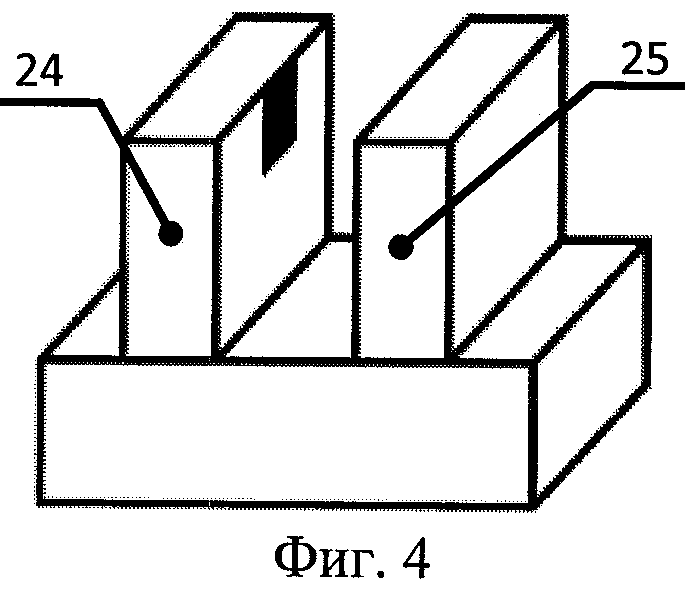
Модулятор питания (МП) 4 предназначен для обеспечения импульсным электропитанием оптического сенсора 23, находящегося в датчике оборотов (ДО) 5. Датчик оборотов (ДО) 5, представлен на Фиг.3, где:
17 - корпус датчики оборотов,
18 - крышка корпуса 17,
19 - ось барабана,
20 - барабан,
21 - щели барабана,
22 - зубья барабана,
23 - оптический сенсор.
Датчик оборотов 5 состоит из корпуса 17, который герметично закрывается крышкой 18.
Ось 19 с возможностью вращения закреплена в корпусе 17 и вращается вокруг своей оси симметрии.
Барабан 20 состоит из полого цилиндра с днищем, например - сплошным. В стенках барабана 20 прорезаны щели 21, например - в количестве 128 щелей по периметру барабана. Зубья 22 представляют собой оставшиеся между щелями 21 части стенок барабана 20.
Программа управления, находящаяся в ПЛИС 3, представлена на Фиг.2 в виде блок-схемы, где:
6 - блок встроенной диагностики (далее по тексту - БВД),
7 - блок автоподстройки частоты модуляции (далее по тексту - БАПЧМ),
8 и 9 - два входа для сигналов, поступающих с установленного в ДО 5 оптического сенсора 23,
10 - линия задержки (далее по тексту - ЛЗ),
11 и 12 - блоки демодуляции (далее по тексту - БДМ) поступающих с входов 8 и 9 сигналов,
13 и 14 - блоки защиты детектора импульсов 15 от несанкционированного переключения (далее по тексту - БЗ),
15 - детектор поступающих с оптического сенсора 23 импульсов (далее по тексту - ДИ),
16 - счетный блок для счета количества импульсов сигнала от оптического сенсора 23 (далее по тексту - СЧБ).
Блок встроенной диагностики 6 сигнальными линиями связан с блоками 7, 10, 11, 12, 13, 14, 15, 16, сенсором 23 и служит для своевременного обнаружения неполадок в программно-аппаратных узлах датчика. Связи программного блока 6 с остальными блоками на Фиг.2 не изображены во избежание загромождения блок-схемы.
Блок автоподстройки частоты модуляции БАПЧМ 7 обеспечивает расчет частоты модулирующего сигнала. Расчет частоты - это (выполняемая по заданному оператором в программе управления алгоритму) подстройка частоты модуляции светового потока от светодиода 24, проходящего через щели 21 барабана 20 и падающего на фотоприемник 25.
Два входа 8 и 9 для сигналов предназначены для приема сигналов, поступающих с установленного в датчике оборотов 5 оптического сенсора 23.
Линия задержки ЛЗ 10 смещает (во времени) модулированный сигнал с БАПЧМ 7. Задержанный во времени сигнал подают на БДМ 11 и 12 для демодуляции сигналов, поступающих с оптического сенсора 23 через входы 8 и 9.
Блоки защиты от несанкционированного переключения (БЗ) 13 и 14 предназначены и обеспечивают фильтрацию сигналов, поступающих с оптического сенсора 23, предотвращая попадание помех в детектор импульсов 15.
В детекторе импульсов (ДИ) 15 находится интеллектуальный алгоритм (в виде программного продукта) обнаружения поступающих с оптического сенсора 23 импульсов и контроля направления вращения ДО 5.
Счетный блок СЧБ 16 состоит из реверсивного счетчика импульсов, поступающих с ДИ 15.
Оптический сенсор 23, например - типа НОА0901-012 фирмы Honeywell [6], представлен на Фиг.4, где:
24 - светодиод сенсора,
25 - фотоприемник сенсора.
Оптический сенсор 23 установлен так, что при вращении барабана (на оси 19) в зазоре сенсора между светодиодом 24 и фотоприемником 25 проходят зубья 22 барабана 20.
Светодиод 24 излучает поток света в том случае, если к нему приложено электрическое напряжение. При отсутствии приложенного напряжения светодиод не излучает световой поток.
При попадании света со светодиода 24 на фотоприемник 25 последний (фотоприемник) генерирует два сигнала, направляемые на входы 8 и 9 программируемой логической интегральной схемы 3 (ПЛИС).
Заявляемое устройство по Фиг.1 работает следующим образом.
В устройство устанавливают источник электропитания (ИП) 1. Источник электропитания 1 подключают к преобразователю напряжения 2. Включают электропитание. После включения электропитания напряжение с ИП 1 поступает на ПН 2, в котором оно (напряжение) стабилизируется и преобразуется до уровня, необходимого для работы ПЛИС 3 и модулятора питания (МП) 4. Конкретные значения необходимых стабилизированных напряжений выбирают исходя из паспортных технических параметров используемого оборудования. Стабилизированные питающие напряжения (из ПН 2) поступают в ПЛИС 3 и блок МП 4. При поступлении питающего напряжения в ПЛИС 3 запускается (находящаяся в ПЛИС 3) программа управления (Фиг.2). Запустившаяся программа управления в первую очередь запускает блок встроенной диагностики (БВД) 6, который по заданному (в программе управления, Фиг.2) алгоритму выполняет диагностику узлов датчика. При совпадении полученных показателей от узлов датчика с заранее заданными эталонными показателями результат диагностики является положительным.
При положительном результате диагностики программа управления (Фиг.2) приступает к управлению узлами датчика и контролю сигналов, поступающих с оптического сенсора 23, находящегося в датчике оборотов (ДО) 5.
В ином случае, например - при отрицательном результате диагностики, в БВД 6 вырабатывается сигнал ошибки, который выводят на показывающий прибор, например - на сигнальную лампу пульта управления. В этом случае отключают электропитание устройства, устраняют причину отрицательного результата диагностики. Затем включают устройство и продолжают работу.
При положительном результате диагностики программа управления устанавливает (согласно заданному в программе алгоритму) скважность q модулирующего сигнала на максимальном уровне, например q=255. Установленная скважность сохраняется неизменной до прихода сигнала (от фотоприемника 25 сенсора 23) на один из входов, например - вход 8 или 9.
После установления скважности БАПЧМ 7 начинает генерировать первично модулированный, зависящий от скорости вращения барабана 20 сигнал, который направляют в ЛЗ 10 и МП 4. Когда сигнал попадает в МП 4, он (сигнал) модулирует постоянное напряжение от преобразователя напряжения ПН 2.
Модулированное (блоком МП 4) напряжение из ПН 2 подается на светодиод 24 оптического сенсора 23. Находящийся под напряжением светодиод испускает (генерирует) свет. При этом у светодиода 24 яркость светового потока изменяется согласно форме и величине поступающего (из МП 4) напряжения. Генерируемый светодиодом 24 световой поток проходит через щели 21 вращающегося барабана 20 и попадает на фотоприемник 25 оптического сенсора 23, который (фотоприемник) генерирует электрические сигналы, поступающие на входы 8 и 9. Когда же световой поток прерывается зубьями барабана, прекращается генерация сигналов фотоприемником 25 оптического сенсора 23, что сопровождается прекращением поступления сигналов на входы 8 и 9.
Выступающая из корпуса 17 ось вращения 19 барабана 20 связана, например - механически, через шестеренчатую передачу, с объектом измерений, например - с вращающимся ротором двигателя турбобура бурового агрегата.
С началом вращения оси 19 от внешнего привода, например - двигателя, скорость которого измеряют, с закрепленным на оси барабаном 20, модулированный напряжением из блока МП 4 поток света (от светодиода 24) вторично модулируется щелями 21 (периодически пропускающими световой поток) вращающегося барабана 20. Дважды модулированный поток света падает на фотоприемник 25 оптического сенсора 23, который вырабатывает двухканальный сигнал, направляемый на входы 8 и 9 ПЛИС 3. Поступившие в ПЛИС 3 сигналы демодулируются на блоках демодуляторов БДМ 11 и 12 сигналом из блока БАПЧМ 7, прошедшим через линию задержки ЛЗ 10. Один из полученных, например - с блока ДМ 12, сигналов поступает в блок БАПЧМ 3, где происходит расчет частоты модулирующего сигнала, согласно поступающим данным о скорости вращения и/или частоте оборотов оси датчика оборотов ДО 5.
Модулированный сигнал из БАПЧМ 7 имеет положительный полупериод (при положительном полупериоде светодиод 24 излучает свет) постоянной продолжительности, равный минимальному времени запуска светодиода, определяемому из паспортных данных светодиода 24 - оптического сенсора 23, например - две микросекунды. Так как время положительного полу периода модулирующего сигнала зафиксировано, то его (модулирующего сигнала) скважность зависит от значения частоты модулирующего сигнала, полученного в блоке БАПЧМ 7.
Блок АПЧМ 7 настраивают так, чтобы значение частоты модуляции сигнала (от БАПЧМ 7) устанавливалось на уровне, необходимом для детектирования щелей барабана датчика оборотов (ДО) 5. Необходимое для детектирования щелей барабана значение частоты модуляции сигнала (от БАПЧМ 7) связано с минимальным количеством импульсов света, необходимых для детектирования каждой отдельно взятой щели 21 барабана 20 и определения направления вращения барабана 20. Например, минимальное количество импульсов света - не менее 10. При минимальном количестве импульсов света достигают оптимального потребления электроэнергии от источника электропитания 1. Например - 32 импульса света от светодиода 24 за время прохождения одной щели 21. Значение частоты модуляции сигнала, рассчитывается блоком АПЧМ 7 каждый раз (индивидуально) при прохождении конкретной щели 21 барабана 20, исходя из продолжительности времени прохождения предыдущей (по отношению к конкретной) щели, пропускающей поток света от светодиода 24 к фотосенсору 25.
Кроме того, оба демодулированных сигнала с блоков БДМ 11 и 12 поступают в блоки защиты от несанкционированного переключения (БЗ) 13 и 14. В блоках защиты 13 и 14 происходит фильтрация демодулированных сигналов с блоков БДМ 11 и 12 от возможных высокочастотных помех. Отфильтрованные сигналы поступают в детектор импульсов ДИ 15, где происходит анализ данных, поступающих по каналам 8 и 9. Согласно результатам анализа поступающих с БЗ 13 и 14 сигналов, детектором импульсов 15 генерируются счетные импульсы, соответствующие угловому смещению (углу поворота барабана 20) и сигнал направления вращения. Количество счетных импульсов соответствует количеству щелей барабана 20» прошедших между светодиодом и фотоприемником. При этом, чем больше угол поворота барабана и количество оборотов барабана - тем больше счетных импульсов поступает с детектора импульсов 15.
Счетные импульсы поступают в счетный блок СЧБ 16, где они (счетные импульсы) суммируются согласно сигналу направления вращения. Значение СЧБ 16 по надобности в любой момент выгружают на внешние устройства, например - на цифровое показывающее устройство. Таким образом, заявляемое устройство регистрирует и показывает угловые смещения оси 19, связанной с контролируемым объектом. После соответствующей тарировки заявляемое устройство регистрирует, визуализирует и показывает, например - обслуживающему персоналу, параметры контролируемого объекта.
Передавая протарированное значение вычисленного в блоке АПЧМ 7 частоты модулирующего сигнала на показывающее устройство, контролируют и поддерживают оптимальную угловую скорость вращения оси 19, связанной с контролируемым объектом.
Заявляемое устройство по сравнению с прототипом обладает существенно лучшими эксплуатационными характеристиками. Использование автономного источника электропитания обеспечивает эксплуатацию датчика вне зависимости от наличия внешнего источника электропитания, например - при геологоразведочном бурении скважин на местности, где отсутствует стационарные источники электроэнергии. Это существенно расширяет область применения заявляемого устройства. Использование встроенного блока диагностики повышает стабильность работы заявляемого устройства. Использование блока автоподстройки частоты модуляции обеспечивает электропитание светодиода в импульсном режиме и способствует экономии электроэнергии от источника электропитания. Использование увеличенного (по сравнению с прототипом) количества импульсов сигнала для вторичной модуляции путем использования барабана с увеличенным количеством щелей для создания счетных импульсов (у прототипа - 35 импульсов, у заявляемого датчика - не менее 128 импульсов) обеспечивает повышенную разрешающую способность и точность результата измерений. Кроме того, наличие блока защиты от несанкционированного переключения сигналов от оптического сенсора и влияния помех обеспечивает повышенную (по сравнению с прототипом) достоверность результата измерений.
Приведенное описание работы и применения предполагаемого изобретения показывает его полезность для регистрации параметров производственного процесса, например - рабочих параметров турбобура при бурении скважины для разведки месторождения углеводородного сырья. Применение предлагаемого устройства при бурении скважины способствует оптимальной организации процесса бурения, например - путем обеспечения числа оборотов бура соответственно свойствам пробуриваемой горной породы. Предполагаемое изобретение удовлетворяет критериям новизны, так как при определении уровня техники не обнаружено средство, которому присущи признаки, идентичные (то есть совпадающие по исполняемой ими функции и форме выполнения этих признаков) всем признакам, перечисленным в формуле изобретения, включая характеристику назначения.
Заявляемое устройство соответствует критерию «новизна», предъявляемому к изобретениям, т.к. из проведенного заявителем исследования уровня техники не выявлены технические решения, с признаками использованными в заявленном техническом решении.
Заявляемое устройство соответствует критерию «изобретательский уровень», предъявляемому к изобретениям поскольку из уровня техники не выявлены технические решения, имеющие признаки, совпадающие с отличительными признаками данного изобретения, и не установлена известность влияния отличительных признаков на указанный технический результат.
Заявленное техническое решение соответствует критерию «промышленная применимость», предъявляемому к изобретениям так как датчик изготовлен и апробирован в полевых условия на действующей буровой станции и получены прогнозируемые результаты, указанные в заявленных целях, таким образом заявленное решение возможно реализовать в промышленном производстве бурильного, горнопроходческого оборудования, с применением стандартных станков с числовым программным управлением, посредством использования известных стандартных технических устройств и оборудования.
Использованные источники
1. Электронно-оптический тахометр. Авт.свид. СССР №150265. Заявлено 11.11.1961 г. за №755537/26-10. Опубликовано в Бюллетене изобретений №18, 1962 г. Описание А.с. №150265.
2. Датчик скорости вращения. Авт.свид. СССР №279071. Заявлено 03.11.1969 г. за №1302909/18-10. Опубликовано в Бюллетене изобретений №26, 1970 г. Описание А.с.№279071.
3. Датчик оборотов лебедки ICS SR 0004 ООО НЛП ТЕОТЕК-ПРИБОР. Ссылка на устройство, http://www.geotek.ru/ktts.php?Page=d_dol
4. Датчик положения талевого блока "ДОЛ-5" ООО НПП "Геосфера". Каталожный номер UPEG 01.01.21. Ссылка на устройство, http://www.geosferatver.ru/datchiki/dol-5/dol-5.php.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНЫЙ ИЗМЕРИТЕЛЬ ВЕКТОРА УГЛОВОЙ СКОРОСТИ НА ОСНОВЕ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 2017 |
|
RU2676944C1 |
| Бортовая распределённая система контроля и диагностики утечек на основе технологий фотоники | 2018 |
|
RU2685439C1 |
| АКУСТООПТИЧЕСКИЙ ВОЛОКОННЫЙ КАБЕЛЬ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2015 |
|
RU2602422C1 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОЙ ДИАГНОСТИКИ КРОВОСНАБЖЕНИЯ И ЖИЗНЕОБЕСПЕЧЕНИЯ БИОЛОГИЧЕСКИХ ТКАНЕЙ | 2017 |
|
RU2663938C1 |
| СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА С ОТКРЫТЫМ КОНТУРОМ | 2012 |
|
RU2523759C1 |
| Способ контроля параметров лазерного канала управления прицельных комплексов и устройство диагностики для его осуществления | 2023 |
|
RU2824220C1 |
| СПОСОБ ПОВЫШЕНИЯ СТАБИЛЬНОСТИ МАСШТАБНОГО КОЭФФИЦИЕНТА ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 2017 |
|
RU2671377C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277689C1 |
| Волоконно-оптический гироскоп с большим динамическим диапазоном измерения угловых скоростей | 2016 |
|
RU2620933C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ПРОХОДЧЕСКОЙ МАШИНЫ | 2014 |
|
RU2566165C1 |
Изобретение относится к измерительным приборам, выполняющим измерения с помощью оптических и электрических средств, и может быть использовано для контроля угловой скорости вращения, угловых перемещений и поворота механизмов. Датчик содержит автономный источник электропитания, преобразователь напряжения и датчик оборотов. Датчик оснащен программируемой логической интегральной схемой (ПЛИС) с запрограммированными алгоритмом диагностики узлов датчика и алгоритмом управления и модулятором питания, связанным с датчиком оборотов. Способ работы датчика характеризуется тем, что в ПЛИС генерируют первично модулированный сигнал, который подают в модулятор питания. Модулированное сигналом из ПЛИС напряжение подают в датчик оборотов и первично модулированное напряжение преобразуют в первично модулированный световой поток, который вторично модулируют, пропуская его через щели барабана, приводимого во вращение объектом измерения. Прошедший через щели вторично модулированный световой поток преобразуют фотоприемником во вторично модулированный электрический сигнал, который подают в ПЛИС, где по заданному алгоритму производят расчет угловой скорости и угловых перемещений. Изобретение позволяет снизить энергопотребление и повысить разрешающую способность датчика. 2 н.п. ф-лы, 4 ил.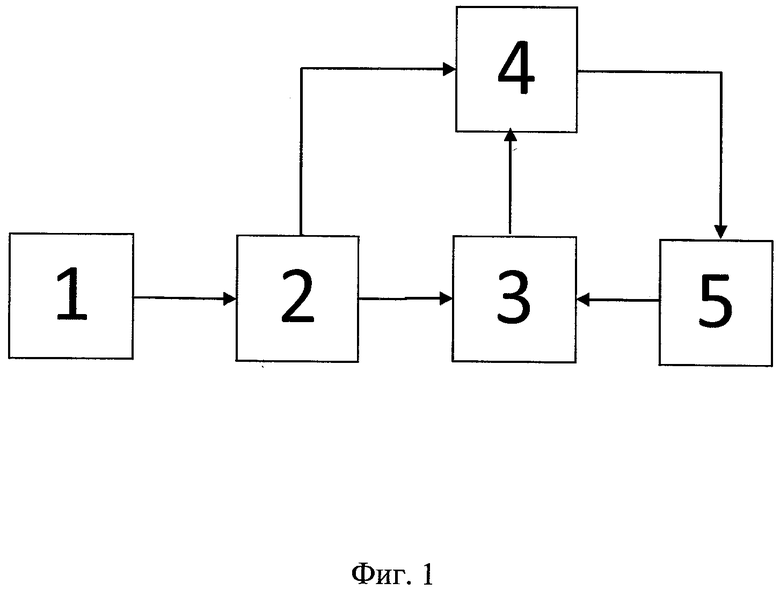
1. Датчик угловой скорости и угловых перемещений, содержащий автономный источник электропитания, преобразователь напряжения, модулятор питания, датчик оборотов, отличающийся тем, что датчик угловой скорости и угловых перемещений дополнительно оснащен программируемой логической интегральной схемой с запрограммированными алгоритмом диагностики узлов датчика и алгоритмом управления модулятором питания, связанным с датчиком оборотов электрическими соединениями, по которым подается модулированное питающее напряжение на датчик оборотов.
2. Способ работы датчика по п.1, отличающийся тем, что в программируемой логической интегральной схеме генерируют первично модулированный сигнал, при этом первично модулированный сигнал от программируемой логической интегральной схемы подают в модулятор питания, где производят модуляцию напряжения питания от преобразователя поступающим из программируемой логической интегральной схемы первично модулированным сигналом, выработанное модулятором питания, модулированное сигналом из программируемой логической интегральной схемы напряжение, подают в датчик оборотов, в котором первично модулированное напряжение преобразуют в первично модулированный световой поток, этот световой поток вторично модулируют, пропуская световой поток через щели барабана, приводимого во вращение объектом измерения, прошедший через щели вторично модулированный световой поток преобразуют фотоприемником во вторично модулированный электрический сигнал, этот сигнал подают в программируемую логическую интегральную схему, где по заданному алгоритму производят расчет угловой скорости, угловых перемещений и частоты первично модулированного сигнала, результаты расчета выводят на регистрирующее(ие) и показывающее(ие) устройство(а), при этом программируемая логическая интегральная схема при запуске выполняет диагностику узлов датчика, при выполнении диагностики тестируемые узлы выдают контрольные показателя, полученные показатели тестируемых узлов сравниваются с эталонными показателями этих узлов, при совпадении этих показателей результат диагностики является положительным.
| DE 4229610 A1, 03.06.1993 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Устройство для измерения угла или угловой скорости | 1977 |
|
SU1034619A3 |
| Сигнализатор угловой скорости | 1975 |
|
SU556383A1 |
| Фотоэлектрический импульсный датчик | 1986 |
|
SU1348734A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

