Изобретение относится к горной промышленности, а именно, к устройствам управления горными машинами и оборудованием, и может быть использовано в системах управления проходческих и горнодобывающих машин и комплексов.
Известно устройство для дистанционного управления забойной машиной (А.с. №1641992, опубликовано 15.04.91, БИ №14), содержащее расположенные на подвижном рабочем органе забойной машины автономный источник электропитания (аккумуляторную батарею), блок управления и приемный элемент аппаратуры передачи данных, причем аккумуляторная батарея подключена к цепям питания блока управления и цепям питания приемного элемента аппаратуры передачи данных, имеющего дистанционную бесконтактную связь с передающим элементом аппаратуры передачи данных, входящим в состав неподвижного пульта дистанционного управления.
К недостаткам известного устройства можно отнести ограничение по энергоресурсу аккумуляторной батареи, что не позволяет использовать на подвижном рабочем органе энергоемкие узлы и блоки, в частности мощные исполнительные устройства системы управления, и дуплексную аппаратуру передачи данных. В свою очередь, отсутствие исполнительных органов и однонаправленность аппаратуры передачи данных не позволяет в полной мере реализовать принцип обратной связи при управлении узлами и блоками, расположенными на подвижном рабочем органе.
Из известных устройств наиболее близким по технической сущности (прототипом) является устройство для автоматического управления угледобывающим комбайном в профиле пласта (А.с. №1411467, опубликовано 23.07.88, БИ №27), содержащее расположенные на подвижном рабочем органе автономный источник электропитания, блок управления и передающий элемент аппаратуры передачи данных, причем автономный источник питания подключен к цепям питания блока управления и цепям питания передающего элемента аппаратуры передачи данных, имеющей дистанционную бесконтактную связь с приемным элементом аппаратуры передачи данных, входящей в состав неподвижного пульта дистанционного управления.
Недостатком данного прототипа является небольшой ресурс источника питания и, следовательно, ограниченность автономной работы.
Задача изобретения - повышение энергоресурса источника питания, расположенного на подвижном рабочем органе, и за счет увеличенного энергоресурса автономного источника электропитания реализация в полной мере принципа обратной связи при управлении энергоемкими узлами и блоками, в частности исполнительными устройствами и двунаправленной аппаратурой приема-передачи данных.
Указанная задача решается тем, что в устройство дистанционного управления рабочим органом проходческой машины, состоящей из неподвижного основания, рабочего органа, перемещающегося относительно неподвижного основания и оснащенного датчиками и исполнительными механизмами, и породоразрушающего барабана, имеющего кинематическую связь с гидроприводом, включающее автономный источник электропитания, блок управления и аппаратуру передачи данных, а также неподвижный пульт дистанционного управления, дополнительно введен размещаемый на подвижном рабочем органе блок отбора мощности, имеющий кинематическую связь с автономным источником электропитания, выход которого подключен к входу стабилизатора напряжения и входу электропитания силового блока, выходы которого подключены ко входам исполнительных механизмов рабочего органа, а входы подключены к первой группе выходов блока управления, вторая группа выходов которого подключена ко входам первого полукомплекта аппаратуры передачи данных, выходы которой подключены к первой группе входов блока управления, вторая группа входов которого подключена к датчикам рабочего органа, причем первый полукомплект аппаратуры передачи данных через двунаправленный канал имеет информационную связь со вторым полукомплектом аппаратуры передачи данных, входящим в состав неподвижного пульта дистанционного управления, включающего также управляющую ЭВМ, входы и выходы которой подключены к выходам и входам второго полукомплекта аппаратуры передачи данных.
Блок отбора мощности устройства дистанционного управления рабочим органом проходческой машины выполнен в виде второго гидропривода, подключенного к цепям питания гидропривода породоразрушающего барабана. Двунаправленный канал устройства дистанционного управления рабочим органом проходческой машины выполнен в виде радиоканала, или является оптическим в инфракрасном диапазоне, или является оптическим в видимом диапазоне.
Сущность изобретения поясняется чертежами.
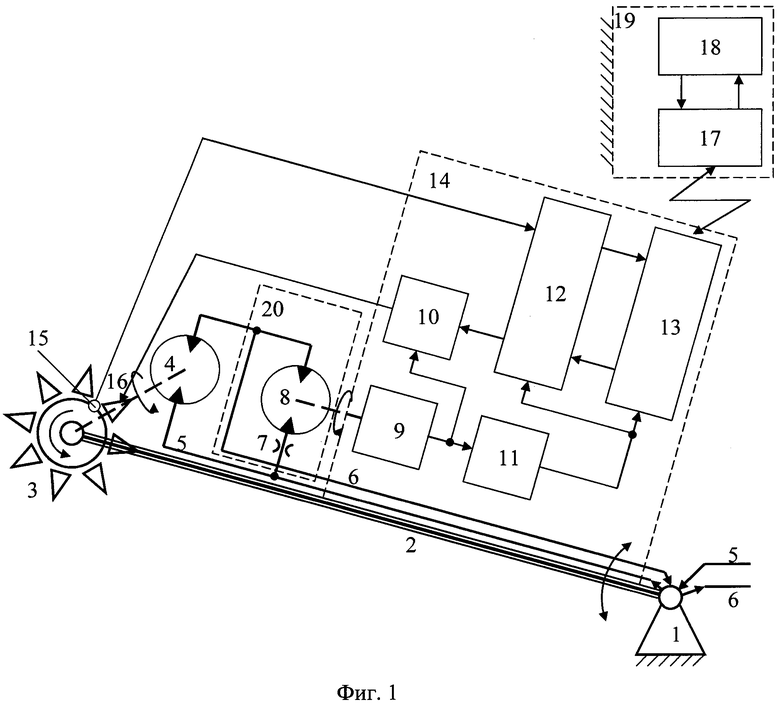
На фиг. 1 приведена схема устройства дистанционного управления рабочим органом проходческой машины.
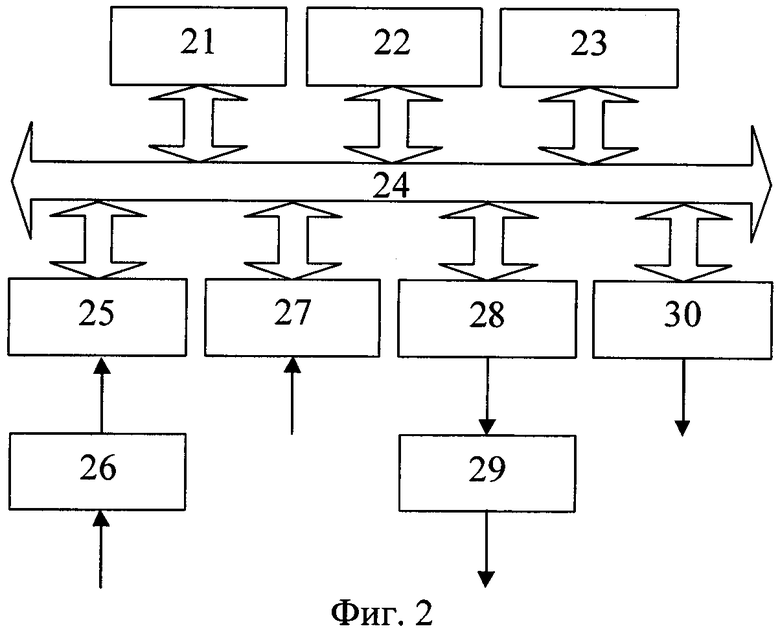
На фиг. 2 приведена схема возможной реализации блока управления.
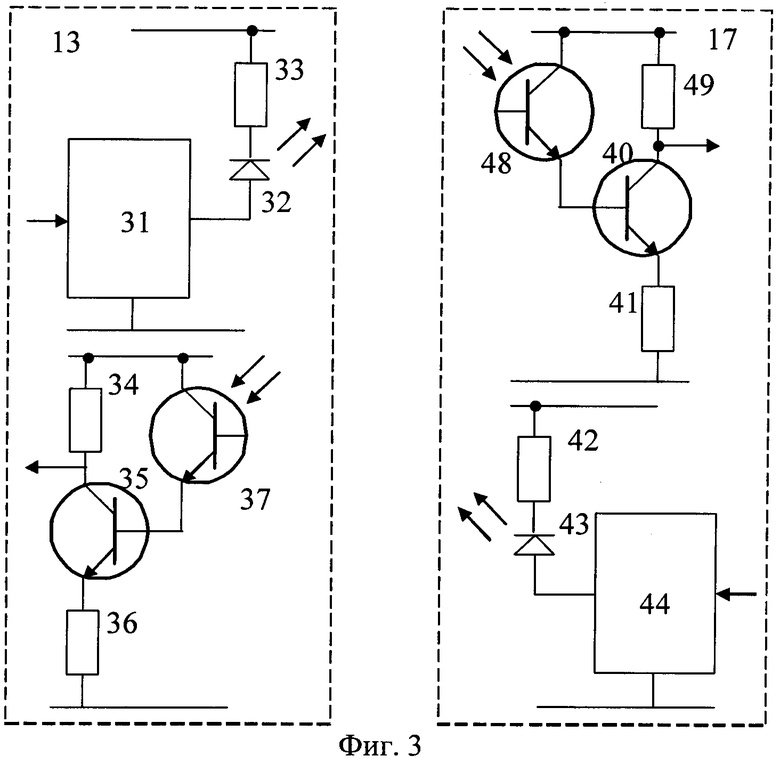
На фиг. 3 приведена схема возможной реализации аппаратуры передачи данных в виде оптического канала в видимом или инфракрасном диапазоне.
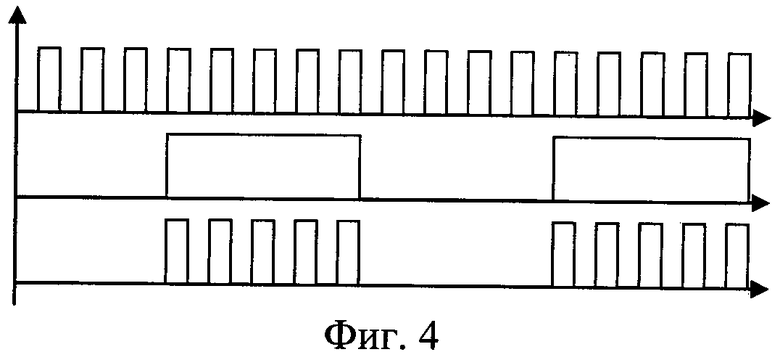
На фиг. 4 приведена временная диаграмма работы модулятора.
В состав устройства дистанционного управления рабочим органом проходческой машины, приведенным на фиг. 1, входит неподвижное основание 1 проходческой машины, в шарнире которого установлена штанга 2 с возможностью вращения, на конце которой установлен породоразрушающий барабан 3, имеющий кинематическую связь с гидроприводом 4, который подключен к напорной магистрали 5 и сливной магистрали 6. Штанга 2, породоразрушающий барабан 3, гидропривод 4, напорная магистраль 5 и сливная магистраль 6 образуют рабочий орган проходческой машины, перемещаемый, в частном случае вращаемый, относительно основания 1. К напорной магистрали 5 через дроссель 7 и к сливной магистрали 6 напрямую подключен второй гидропривод 8. Гидропривод 8 кинематически соединен с входным валом автономного источника 9 электропитания, выход которого электрически подключен к входу электропитания силового блока 10 и к входу стабилизатора 11 напряжения, выход которого подключен к цепям питания блока 12 управления и первого полукомплекта 13 аппаратуры передачи данных. Автономный источник 9 электропитания, силовой блок 10, стабилизатор 11 напряжения, блок 12 управления и первый полукомплект 13 аппаратуры передачи данных представляют собой устройство дистанционного управления 14, которое своими входами и выходами подключено соответственно к датчикам 15 и исполнительным механизмам 16 рабочего органа. Первый полукомплект 13 аппаратуры передачи данных информационно связан со вторым полукомплектом 17 аппаратуры передачи данных, который своими входами и выходами подключен к выходам и входам управляющей ЭВМ 18. Второй полукомплект 17 аппаратуры передачи данных и управляющая ЭВМ 18 образуют неподвижный дистанционный пульт 19 управления, который, в частности, может быть выполнен как неподвижным относительно опоры 1, так и подвижным относительно опоры 1 и рабочего органа 2.
Неподвижный дистанционный пульт управления может быть реализован в виде микропроцессорного блока (фиг. 2), включающего арифметико-логическое устройство 21, постоянное запоминающее устройство (ПЗУ) 22, оперативное запоминающее устройство (ОЗУ) 23, объединенные внутренней шиной 24, к которой подключены также контроллер 25 ввода аналоговых сигналов с аналого-цифровым преобразователем 26, контроллер 27 ввода цифровых сигналов, контроллер 28 вывода цифровых сигналов с цифроаналоговым преобразователем 29 и контроллер 30 вывода цифровых сигналов.
В состав первого (второго) полукомплекта 13 (17) аппаратуры передачи данных в видимом и инфракрасном диапазоне входят модулятор 31 (44), светоизлучающий диод 32 (43), ограничительный резистор 33 (42), фототранзистор 37 (38) и транзисторный усилитель, включающий транзистор 35 (40) и резисторы 34, 36 (39, 41).
Устройство дистанционного управления рабочим органом проходческой машины работает следующим образом. При подаче с компрессора (на фиг. 1 не показан) рабочей жидкости под давлением в напорную магистраль 5 гидропривод 4 раскручивает породоразрушающий барабан 3, при этом отработанную рабочую жидкость по сливной магистрали 6 возвращают в компрессор. Часть рабочей жидкости для блока отбора мощности 20 через дроссель 7 поступает во второй гидропривод 8, который также раскручивают, а отработанную рабочую жидкость по сливной магистрали 6 возвращают в компрессор.
Вал второго гидропривода 8 кинематически связан с входным валом автономного источника 9 электропитания, в качестве которого может быть использована электрическая машина (генератор) постоянного тока, а во взрывоопасных условиях электрическая машина (генератор) переменного тока. При вращении ротора электрической машины на ее выходе вырабатывают электроэнергию в виде постоянного или переменного тока, при этом переменное напряжение должно быть выпрямлено с помощью обычного диодного моста, который можно считать частью электрической машины переменного тока. Так осуществляют отбор мощности для энергопитания устройства дистанционного управления.
Таким образом, на выходе автономного источника 9 электропитания формируют силовое напряжение, которое подают на силовые цепи силового блока 10 и на вход стабилизатора 11. Стабилизатор 11 вырабатывает, независимо от колебаний напряжения на выходе автономного источника 9 электропитания, высокостабильное напряжение, необходимое для электропитания блока 12 управления и первого полукомплекта 13 аппаратуры передачи данных.
На блок 12 управления поступают сигналы с выходов датчиков 15, которые в частном случае, приведенном на фиг. 1, установлены на породоразрушающий барабан, но могут быть установлены и на другие элементы конструкции рабочего органа проходческой машины. Датчики 15 могут быть как аналоговыми, так и цифровыми. Сигналы с аналоговых датчиков 15 подают на входы аналого-цифровых преобразователей 26, которые преобразуют непрерывные меняющиеся во времени величины в последовательность цифровых кодов. Далее цифровые коды с помощью контроллера 25 ввода аналоговых сигналов вводят в микропроцессорный блок для алгоритмической обработки. Сигналы с цифровых датчиков вводят в микропроцессорный блок с помощью контроллера 27 ввода цифровых сигналов, минуя стадию аналого-цифрового преобразования. Кроме того, с помощью контроллера 27 ввода цифровых сигналов в блок 12 управления вводят данные с первого полукомплекта 13 аппаратуры передачи данных.
Микропроцессорный блок управления имеет обычную для подобных устройств структуру, включающую арифметико-логическое устройство 21, постоянное запоминающее устройство 22 и оперативное запоминающее устройство 23, объединенные общей шиной, которое может обрабатывать данные, поступающие с аналоговых и цифровых датчиков по заранее введенной в микропроцессорный блок программе. В результате обработки данных через контроллер 28 вывода и цифро-аналоговый преобразователь 29, или через контроллер 30 вывода из блока 12 управления выводят сигналы, управляющие работой силового блока 10. Сигнал с выхода силового блока 10 является мощным электрическим сигналом, который, в свою очередь, управляет непосредственно исполнительными механизмами 16 рабочего органа. В частном случае, показанном на фиг. 1, исполнительные механизмы 16 рабочего органа установлены на породоразрушающий барабан 3, но они могут быть установлены и на другие элементы конструкции рабочего органа.
Кроме того, из управляющего блока через контроллер 30 выводят цифровые сигналы, поступающие на вход первого полукомплекта 13 аппаратуры передачи данных. Первый полукомплект 13 аппаратуры передачи данных преобразует поступающие на его вход сигналы в сигналы радиоканала, или световые сигналы видимого диапазона, или в световые сигналы инфракрасного диапазона. Преобразование информации в сигналы радиоканала хорошо известно и широко применяется для дистанционной передачи данных. В частном случае, показанном на фиг. 3, цифровые сигналы преобразуют в световые сигналы видимого или инфракрасного диапазона. Для этого на вход модулятора 31 подается цифровой сигнал с выхода блока 12 управления, который заполняется высокочастотными импульсами, что показано на фиг. 4. Далее модулированный сигнал подают на светоизлучающий диод 32, который излучает свет в видимом или инфракрасном диапазоне синхронно с модулированным сигналом. При этом резистор 31 служит для ограничения тока через светоизлучающий диод 32.
Излученные светоизлучающим диодом 32 световые импульсы достигают входного окна фототранзистора 38 второго полукомплекта 17 аппаратуры передачи данных, где преобразуются в ток базы транзистора 40, который в сочетании с резисторами 39 и 41 оказывается включенным по схеме усиления с общим эмиттером. В результате усиления на коллекторе транзистора 40 второго полукомплекта 17 аппаратуры передачи данных неподвижного дистанционного пульта 19 управления формируют модулированную последовательность импульсов, подаваемую на вход управляющей ЭВМ 18. Сформированная последовательность импульсов соответствует последовательности, вырабатываемой модулятором 31 первого полукомплекта 13 аппаратуры передачи данных. В управляющей ЭВМ 18 неподвижного дистанционного пульта 19 управления сигнал с выхода второго полукомплекта 17 аппаратуры передачи данных программно дешифрируют и обрабатывают, в результате чего формируют код, подаваемый на вход второго полукомплекта 17 аппаратуры передачи данных. Этот сигнал через модулятор 44 и светодиод 43 с ограничительным резистором 42 передают в виде последовательности световых импульсов на входное окно фототранзистора 37 первого полукомплекта 13, и в результате усиления с помощью схемы с общим коллектором, включающей транзистор 35 и резисторы 34, 38, поступает на контроллер 30 входа блока 12 управления. Таким образом, сигнал на входе контроллера 30 блока 12 управления соответствует сигналу на выходе модулятора 44 второго полукомплекта 17 аппаратуры передачи данных. Сигнал в блоке 12 управления обрабатывают и используют для управления исполнительными механизмами рабочего органа проходческой машины.
Таким образом, в устройстве дистанционного управления рабочим органом проходческой машины в полной мере происходит формирование принципа обратной связи при цифровом управлении, причем требуемое силовое воздействие на исполнительные механизмы вырабатывают под управлением управляющей ЭВМ 18, входящей в состав неподвижного дистанционного пульта 19 управления за счет автономного источника 9 питания, расположенного на рабочем органе и перемещающегося вместе с ним в процессе проходки.
Подобная конфигурация позволяет существенно повысить энергоресурс источника электропитания, расположенного на подвижном рабочем органе, и за счет повышенного энергоресурса источника электропитания реализовать в полной мере принцип обратной связи при управлении энергоемкими узлами и блоками, в частности исполнительными механизмами и дуплексной аппаратурой приема-передачи данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАШИНОЙ СО СТРЕЛОВЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2642026C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ МНОГОКАНАЛЬНОЙ РАДИОСВЯЗИ | 2017 |
|
RU2654214C1 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
| Система автономного управления дорожно-строительной машины | 2022 |
|
RU2794670C1 |
| МОДУЛЬ ПЛАНИРОВАНИЯ | 2009 |
|
RU2415456C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ПОДАЧИ СТРЕЛОВИДНОГО ИСПОЛНИТЕЛЬНОГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 2011 |
|
RU2464420C1 |
| ТРЕНАЖЕР РАСЧЕТА ПОДВИЖНОГО НАЗЕМНОГО РАКЕТНОГО КОМПЛЕКСА | 2020 |
|
RU2730274C1 |
| Система аэрогазового контроля в зоне очистного забоя | 2022 |
|
RU2805974C1 |
Устройство дистанционного управления рабочим органом проходческой машины предназначено для использования в горных машинах и оборудовании для управления процессом проходки. Задача изобретения - повышение энергоресурса источника питания, расположенного на рабочем органе, и за счет увеличенного энергоресурса автономного источника электропитания реализация в полной мере принципа обратной связи при управлении энергоемкими узлами и блоками, в частности исполнительными устройствами и двунаправленной аппаратурой приема-передачи данных. Устройство содержит автономный источник электропитания, блок управления и аппаратуру передачи данных, а также неподвижный пульт дистанционного управления. В него дополнительно введен размещаемый на рабочем органе блок отбора мощности, имеющий кинематическую связь с автономным источником электропитания, выход которого подключен к входу стабилизатора напряжения и входу электропитания силового блока, выходы которого подключены к входам исполнительных механизмов рабочего органа, а входы подключены к первой группе выходов блока управления, вторая группа выходов которого подключена к входам первого полукомплекта аппаратуры передачи данных, выходы которой подключены к первой группе входов блока управления, вторая группа входов которого подключена к датчикам рабочего органа. Причем первый полукомплект аппаратуры передачи данных через двунаправленный канал имеет информационную связь со вторым полукомплектом аппаратуры передачи данных, входящим в состав неподвижного пульта дистанционного управления, включающего также управляющую ЭВМ, входы и выходы которой подключены к выходам и входом второго полукомплекта аппаратуры передачи данных. 1 з.п. ф-лы, 4 ил.
1. Устройство дистанционного управления рабочим органом проходческой машины, состоящей из неподвижного основания, рабочего органа, перемещающегося относительно неподвижного основания и оснащенного датчиками и исполнительными механизмами, и породоразрушающего барабана, имеющего кинематическую связь с гидроприводом, включающее автономный источник электропитания, блок управления и аппаратуру передачи данных, а также неподвижный пульт дистанционного управления, отличающееся тем, что в него дополнительно введен размещаемый на рабочем органе блок отбора мощности, имеющий кинематическую связь с автономным источником электропитания, выход которого подключен к входу стабилизатора напряжения и входу электропитания силового блока, выходы которого подключены к входам исполнительных механизмов рабочего органа, а входы подключены к первой группе выходов блока управления, вторая группа выходов блока управления подключена к входам первого полукомплекта аппаратуры передачи данных, выходы которой подключены к первой группе входов блока управления, вторая группа входов которого подключена к датчикам рабочего органа, причем первый полукомплект аппаратуры передачи данных через двунаправленный канал выполнен с информационной связью со вторым полукомплектом аппаратуры передачи данных, входящим в состав неподвижного дистанционного пульта управления, включающего также управляющую ЭВМ, входы и выходы которой подключены к выходам и входам второго полукомплекта аппаратуры передачи данных, двунаправленный канал устройства дистанционного управления рабочим органом проходческой машины выполнен в виде радиоканала, или является оптическим в инфракрасном диапазоне, или является оптическим в видимом диапазоне.
2. Устройство по п. 1, отличающееся тем, что блок отбора мощности выполнен в виде второго гидропривода, подключенного к цепям питания гидропривода породоразрушающего барабана.
| Устройство для автоматического управления угледобывающим комбайном в профиле пласта | 1986 |
|
SU1411467A1 |
| Устройство для дистанционного управления забойной машиной | 1988 |
|
SU1641992A1 |
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1974 |
|
SU779577A1 |
| Прибор для определения процентного содержания остаточного аустенита в стали и сплавах | 1957 |
|
SU108802A1 |
| Устройство для снятия мешков со штабеля | 1959 |
|
SU129989A1 |
| WO 2004016900 A1, 26.02.2004. | |||

