Область техники, к которой относится изобретение
Настоящее описание относится к системе контроля производительности, и более точно, к системе контроля продуктивности для множества машин, работающих на общем рабочем месте.
Уровень техники
Горные работы, строительство и другие операции с большим объемом земляных работ требуют целого парка копающих, загружающих и транспортирующих машин, чтобы удалять и транспортировать вынутый грунт, например, такой как руда, или перегрузки из зоны выемки грунта к заданному месту назначения. Чтобы такая операция была рентабельной, парк машин должен работать продуктивно и эффективно. Множество факторов может оказывать влияние на продуктивность и эффективность работы на рабочем месте, включая помимо других факторов условия на рабочем месте (т.е. дождь, снег, уровни влажности грунта, состав материала, видимость, горизонтальность поверхности и т.д.), состояние машины (т.е. срок службы, плохое состояние машины, неисправность, сорт топлива, находящегося в использовании, и т.д.), и состояние оператора (т.е. опыт, мастерство, сноровка, способность выполнять несколько задач, осведомленность о машине или рабочем месте и т.д.). К сожалению, когда работа на рабочем месте является непродуктивной или неэффективной, может быть трудно определить, какой из этих факторов имеет самое большое влияние и на что нужно обратить внимание.
Один из способов диагностирования проблем на рабочем месте раскрывается в публикации патента США №2005/0267713 (публикация '713) Horkavi и др., опубликованной 1 декабря 2005 г. В публикации '713 Horkavi и др. описывает систему сбора данных для машины, которая генерирует операторскую индексную информацию. Система сбора данных имеет датчик, расположенный на машине, и сконфигурирована таким образом, чтобы генерировать сигнал, показывающий операционный параметр машины. Система сбора данных также имеет модуль идентификации, расположенный на машине и сконфигурированный таким образом, чтобы принимать входной сигнал, соответствующий оператору машины. Система сбора данных дополнительно имеет контроллер, расположенный на машине, при этом он поддерживает связь с датчиком и идентификационным модулем. Контроллер сконфигурирован таким образом, чтобы записывать и связывать сигнал и входные данные. Система сбора данных дополнительно имеет модуль связи, расположенный на машине, при этом он имеет связь с контроллером. Модуль связи сконфигурирован таким образом, чтобы передавать записанный и связанный сигнал, а также входные данные из контроллера к внешней системе. Эта внешняя система затем анализирует записанный и связанный сигнал и входные данные для определения разности по производительности машины, которая может быть непосредственно отнесена к управлению конкретного оператора машины. Эта оценка производительности машины, основанная на индексной информации оператора, может способствовать эффективному использованию возможностей персонала и оборудования.
Хотя способ, описанный в публикации '713, может помочь в определении влияния работы оператора на функционирование одной машины, применительно к рабочему месту, на котором работает много машин, этот способ может быть неприемлем. Например, если производительность на рабочем месте в целом является низкой, то индексная информация оператора может мало помочь в том, чтобы выявить, с чем связана низкая производительность: вызвана ли она недавним штормом, плохим состоянием машины или управлением оператора.
Настоящее изобретение направлено на преодоление одной или более проблем, сформулированных выше.
Раскрытие изобретения
В соответствии с одним аспектом, настоящее изобретение относится к системе контроля производительности множества машин, работающих на общем рабочем месте. Система контроля производительности содержит по меньшей мере один модуль сбора данных, выполненный с возможностью отслеживать производительность множества машин, и контроллер, взаимодействующий по меньшей мере с одним модулем сбора данных. Контроллер выполнен с возможностью собирать данные о производительности машин по меньшей мере из одного модуля сбора данных и выявлять нарушение нормальной производительности на основе собранных данных по производительности машин. Контроллер также выполнен с возможностью анализировать собранные данные по производительности машин и определять на основе сравнения какой из следующих факторов: состояние машины, состояние оператора или состояние места - является основной причиной нарушения нормальной производительности.
В другом аспекте, настоящее изобретение относится к способу контроля производительности множества машин на общем рабочем месте. Согласно способу собирают данные по производительности машин, относящиеся к каждой из множества машин, и выявляют нарушение нормальной производительности на основе собранных данных по производительности машин. Кроме того, сравнивают собранные данные по производительности машин и определяют на основе сравнения, какой из следующих факторов: состояние машины, состояние оператора или состояние места - является основной причиной нарушения нормальной производительности.
Краткое описание чертежей
Фиг.1 - схематичное представление типичного описанного рабочего места;
фиг.2 - схематичная иллюстрация типичной машины, которая может работать на рабочем месте, показанном на фиг.1;
фиг.3 - схематичная иллюстрация примерной системы контроля производительности, которая может использоваться на рабочем месте, показанном на фиг.1;
фиг.4 - схема последовательности процесса, изображающая типовую работу системы контроля производительности, показанной на фиг.3.
Осуществление изобретения
Фиг.1 показывает рабочее место 10, например, работа по открытой разработке месторождения. Как часть функции разработки месторождения, экскаваторы и другие машины могут работать на различных участках рабочего места 10 или между ними. Эти машины могут включать в себя, среди прочих, землеройные машины 12, погрузочные машины 14 и транспортировочные машины 16. Каждая из машин на рабочем месте 10 может иметь связь с любой другой машиной и/или с центральной станцией 18 с помощью беспроводной связи, чтобы передавать и принимать рабочие данные и инструкции.
Землеройной машиной 12 может называться любая машина, которая вынимает материал на рабочем месте 10 с целью последующих операций (т.е. для взрывных работ, загрузки и транспортировки). Примеры землеройных машин 12 могут включать в себя экскаваторы, экскаваторы типа «обратная лопата», бульдозеры, бурильные машины, траншейные экскаваторы, канатно-скребковые экскаваторы и т.д. Множество землеройных машин 12 могут быть сосредоточены внутри общей зоны на рабочем месте 10 и могут осуществлять аналогичные функции. По существу, при нормальных условиях подобные сосредоточенные в каком-либо месте землеройные машины 12 должны выполнять приблизительно одинаковую работу с точки зрения производительности и эффективности, когда они находятся в аналогичных условиях на рабочем месте.
Погрузочной машиной 14 может называться любая машина, которая поднимает, переносит и/или загружает материал, который был вынут землеройной машиной 12, на транспортировочные машины 16. Примеры погрузочных машин 14 могут включать в себя колесный и гусеничный погрузчик, экскаватор с прямой лопатой, экскаватор, канатный одноковшовый экскаватор или любую другую подобную машину. Одна или более погрузочных машин 14 могут работать внутри общих зон рабочего места 10, чтобы загружать вынутый материал на транспортировочные машины 16. При нормальных условиях подобные сосредоточенные в каком-либо месте погрузочные машины 14 должны выполнять приблизительно одинаковую работу с точки зрения производительности и эффективности, когда они находятся в одинаковых условиях на рабочем месте.
Транспортировочной машиной 16 может называться любая машина, которая перемещает вынутые материалы между различными местами в пределах рабочего места 10. Примеры транспортировочных машин 16 могут включать в себя: грузовой автомобиль с шарнирно-сочлененной рамой, карьерный самосвал, дорожный самосвал, тракторный скрепер на колесном ходу или любую другую подобную машину. Нагруженные транспортировочные машины 16 могут перевозить породу вскрытия из зоны выемки в пределах рабочего места 10, по дороге для транспортировки вынутых материалов к различным местам для хранения отвалов и возвращаться к тем же или другим зонам выемки породы для новой загрузки. При нормальных условиях подобные сосредоточенные в каком-либо месте транспортировочные машины 16 должны выполнять приблизительно одинаковую работу с точки зрения производительности и эффективности, когда они находятся в аналогичных условиях на рабочем месте.
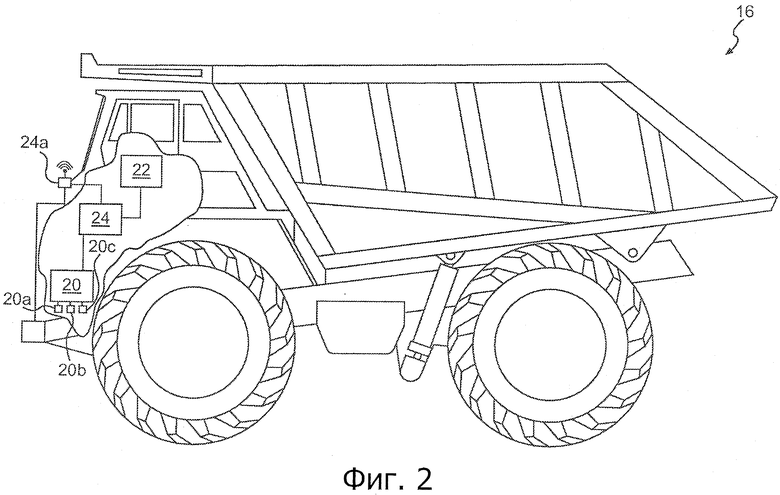
Фиг.2 показывает одну типичную машину, которая может работать на рабочем месте 10. Следует заметить, что хотя показанная на фигуре машина может изображать транспортировочную машину 16, последующее описание может быть в равной степени применено к любой машине, работающей на рабочем месте 10. Транспортировочная машина 16 может записывать и передавать данные на центральную станцию 18 (см. фиг.1) во время работы. Эти данные могут включать в себя идентификационные данные машины, данные о рабочих характеристиках, диагностические данные и другие данные, которые могут автоматически контролироваться с борта машины 16 и/или могут просматриваться вручную и вводиться операторами машины.
Идентификационные данные могут включать в себя относящиеся к машине специальные данные, конкретные данные оператора, и/или данные конкретного места. Относящиеся к машине специальные данные могут включать в себя идентификационные данные, связанные с типом машины (например, землеройная, погрузочная, транспортировочная и т.д.), тип и модель машины (например. Caterpillar 797 ОНТ), дату производства машины или ее возраст, историю использования или технической поддержки/ремонта и т.д. Специальные данные оператора могут включать в себя идентификацию данного оператора, информацию о данном операторе (например, уровень мастерства или опыта, уровень его полномочий, количество времени, прошедшее за период текущей смены, история загрузки и т.д.), историю работавших прежде операторов и т.д. Конкретные данные местоположения могут включать в себя задание, выполняемое в данный момент оператором, разрешение на нахождение на данном рабочем месте 10, текущее местоположение на данном рабочем месте 10, историю места, состав материала в конкретной области рабочего места 10 и т.д.
Данные о рабочих характеристиках могут включать в себя текущие и предшествующие данные, связанные с работой машины на рабочем месте 10. Данные о рабочих характеристиках могут включать в себя, например, информацию о полезной нагрузке, информацию об эффективности, время простоя и ремонта, или информацию о техническом обслуживании и т.д.
Диагностические данные могут включать в себя информацию записанного параметра, связанную с особыми компонентами и/или системами машины. Например, диагностические данные могут включать в себя температуру двигателя, скорость вращения или ускорение двигателя и/или скорость или ускорение относительно поверхности, характеристики рабочей жидкости (например, уровни, загрязнение, вязкость, температура, давление и т.д.), расход топлива, выбросы выхлопных газов, состояние тормозной системы, характеристики трансмиссии, давление и температуру воздуха и/или выхлопных газов, впрыск топлива и/или распределение во времени процесса зажигания, крутящий момент колеса, сопротивление качению, электрическое напряжение системы и т.д. Некоторые диагностические данные могут отслеживаться напрямую, а другие данные могут быть производными или рассчитанными из отслеживаемых параметров. Диагностические данные могут быть, при желании, использованы для определения данных о рабочих характеристиках.
Чтобы облегчить сбор, запись и передачу этих данных от машин на рабочем месте 10 на центральную станцию 18 (см. фиг.1), каждая транспортировочная машина 16 может содержать расположенный на ее борту модуль 20 сбора данных, интерфейсный модуль 22 оператора и модуль 24 связи. Данные, принятые модулем 20 сбора данных и интерфейсным модулем 22 оператора, могут быть переданы от машины к центральной станции 18 с помощью модуля 24 связи. Модуль 24 связи может также использоваться для отправки инструкций, полученных от центральной станции 18, к оператору транспортировочной машины 16 с помощью интерфейсного модуля 22 оператора. Предполагается, что дополнительные или другие модули могут быть, при желании, расположены на борту транспортировочной машины 16.
Модуль 20 сбора данных может включать в себя множество датчиков 20а, 20b, 20с, распределенных по корпусу транспортировочной машины 16 и выполненных таким образом, чтобы собирать данные от различных ее компонентов и подсистем. Предполагается, что в машине может быть расположено большее или меньшее количество датчиков, чем то количество, которое показано на фиг.1. Датчики 20а-с могут быть связаны с источником мощности (не показано), трансмиссией (не показано), тяговым устройством, рабочим инструментом, операторской станцией, и/или другими компонентами и подсистемами транспортировочной машины 16. Эти датчики могут быть сконфигурированы таким образом, чтобы обеспечивать данные, собранные от каждого из связанных с ними компонентов и подсистем. Другие части информации могут генерироваться или поддерживаться модулем 20 сбора данных, например, время дня, дата, местоположение машины (глобальное и/или локальное).
Интерфейсный модуль 22 оператора может быть расположен на борту транспортировочной машины 16 для ручной записи данных. Данные, принятые через интерфейсный модуль 22 оператора, могут включать в себя наблюдаемую информацию, связанную с рабочим местом 10, машиной 16 и/или оператором. Например, наблюдаемые данные могут включать в себя дефект на дороге, по которой следует транспортировочная машина 16, количество наблюдаемых атмосферных осадков или видимость на рабочем месте 10, чрезмерная вибрация, звук или запах в транспортировочной машине 16 или идентификацию оператора и время начала его работы. Оператор может записать эту информацию в физический или электронный журнал (не показан), расположенный внутри транспортировочной машины 16, во время или после рабочей смены. В некоторых случаях данные от интерфейсного модуля 22 оператора могут автоматически комбинироваться с данными, записанными модулем 20 сбора данных. Например, ввод данных оператором, относящийся к типу и критическому состоянию дорожного дефекта, может координироваться с географическим местоположением транспортировочной машины 16, при этом также вводятся данные по вибрации, измеренные, когда были введены наблюдаемые данные, а также имя оператора, управляющего транспортировочной машиной 16, когда произошло столкновение с дорожным дефектом.
Модуль 24 связи может включать в себя любое устройство, облегчающее обмен данными между транспортировочной машиной 16 и центральной станцией 18. Модуль 24 связи может включать в себя аппаратные средства и/или программные средства, которые дают возможность посылать и/или принимать данные через линию 24а беспроводной связи. Предполагается, что в некоторых ситуациях данные могут быть переданы на центральную станцию 18 через прямой канал передачи данных (не показан) или, при желании, выгружены из транспортировочной машины 16 и загружены в центральную станцию 18. Также предполагается, что в некоторых ситуациях, данные, которые автоматически отслеживаются модулем 22 сбора данных, могут быть переданы электронным способом, а оператор, регистрирующий данные, может иметь связь с центральной станцией 18 через устройство голосовой связи, например, через двустороннюю радиосвязь (не показано).
Модуль 24 связи может также иметь возможность записывать отслеживаемые и/или введенные вручную данные. Например, модуль 24 связи может включать в себя записывающее устройство (не показано), имеющее носитель информации (не показан). В некоторых случаях носитель информации может быть переносным, и данные могут быть переданы из транспортировочной машины 16 на центральную станцию 18 с помощью этого переносного носителя информации.
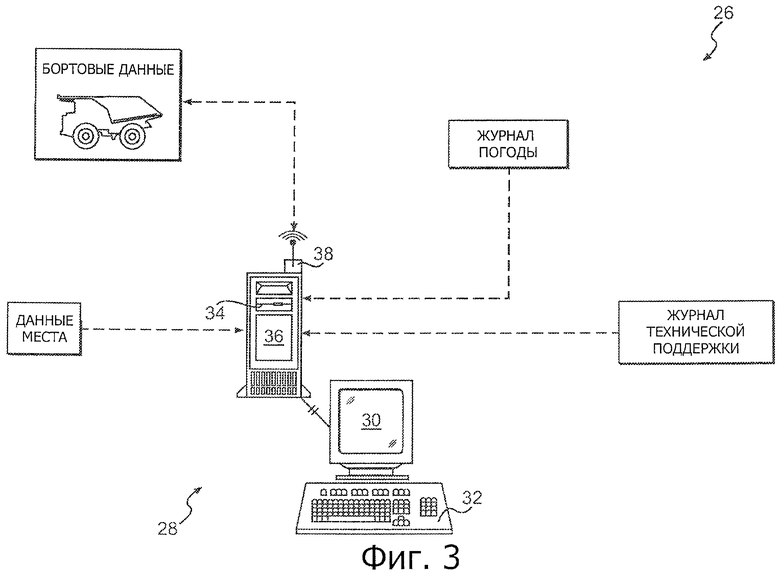
Фиг.3 является схематической иллюстрацией системы 26 контроля производительности, сконфигурированной таким образом, чтобы принимать и анализировать данные, переданные по средствам связи к центральной станции 18 от машин 12-16, и из других источников. Система 26 контроля производительности может включать в себя контроллер 28, поддерживающий связь с центральной станцией 18 и выполненный таким образом, чтобы обрабатывать данные от множества источников и осуществлять контроль производительности на рабочем месте 10. Контроллер 28 может быть, в первую очередь, предназначен для повышения производительности и эффективности работы, производимой на рабочем месте 10.
Контроллер 28 может включать в себя любой тип компьютера или множество компьютеров, соединенных вместе с помощью сети. Контроллер 28 может быть расположен поблизости от рабочего места 10, где производится добыча полезных ископаемых, или может быть расположен на значительном расстоянии от места разработки месторождений, например, это может быть другой город, или даже другая страна. Также предполагается, что компьютеры в различных местах могут быть, при желании, связаны с помощью сети для формирования контроллера 28.
Контроллер 28 может включать в себя, помимо других компонентов, терминал 30 для контроля, устройство 32 ввода, средства 34 ввода/вывода, носитель 36 данных и интерфейс 38 связи. Терминал 30 для контроля может быть компьютерным дисплеем любого подходящего типа, который обеспечивает графический интерфейс пользователя (GUI), чтобы отображать результаты и информацию для операторов и других пользователей системы 26 контроля производительности. Устройство 32 ввода данных может быть обеспечено для операторов, чтобы вводить информацию в контроллер 28. Устройство 32 ввода данных может включать в себя, например, клавиатуру, мышь или другое компьютерное устройство ввода данных. Средства 34 для ввода/вывода могут быть устройством любого типа, выполненных таким образом, чтобы считывать/записывать информацию из/в переносной носитель записи. Средства 34 ввода/вывода могут включать в себя, наряду с другими, гибкий диск, компакт-диск CD, DVD или устройство считывания/записи с флеш-памятью. Средства 34 ввода/вывода могут быть обеспечены для передачи данных в контроллер 28 и из него, используя переносной носитель записи. Носитель 36 данных может включать в себя любое устройство для хранения данных в контроллере 28, например, жесткий диск. Носитель 36 данных может быть использован для хранения базы данных, содержащей помимо другой информации, информацию, относящуюся к истории места, где проводятся работы, информацию о машине и данные, относящиеся к оператору. Интерфейс 38 связи может обеспечивать соединение с центральной станцией 18, позволяя контроллеру 28 иметь дистанционный доступ через компьютерные сети, а также позволяет передавать в контроллер 28 и из него данные из удаленных источников. Интерфейс 38 связи может содержать соединения с сетью, соединения канала передачи данных и/или антенны, выполненные для беспроводного приема данных.
Данные могут быть переданы контроллеру 28 электронным способом или вручную. Электронная передача данных включает в себя передачу данных с использованием возможностей беспроводного способа, или передачу данных через интерфейс 38 связи. Также данные могут быть переданы в контроллер 28 электронным способом через переносной носитель информации с использованием средств 34 ввода/вывода. Ручная передача данных в контроллер 28 может включать в себя обмен данными оператора с системой контроля каким-либо способом, при этом оператор может вручную ввести данные в контроллер 28 с помощью, например, устройства 32 ввода данных. Данные, передаваемые в контроллер 28, могут включать в себя идентификационные данные машины, данные о рабочих характеристиках, диагностические данные и другие данные. Другие данные могут включать в себя, например, данные о погоде (текущие, исторические и прогноз), данные о техническом обслуживании и ремонте машины, данные о месте, такие как информация результатов обследований или проб почвы, а также другие данные, известные в данной области техники.
Контроллер 28 системы 26 контроля производительности может анализировать данные и представлять результаты пользователю системы с помощью терминала 30 для контроля. Эти результаты могут включать в себя анализы производительности и/или экономический анализ (например, эффективность) для каждой машины, для каждой категории машин (т.е. для землеройных машин 12, погрузочных машин 14 или для транспортировочных машин 16), для расположенных в том же месте машин, для каждого оператора, связанного с машинами 12-16 и/или для рабочего места 10 в целом. Результаты могут быть проиндексированы в соответствии со временем, например, в соответствии с конкретной сменой или конкретным 24-часовым периодом.
Результаты анализов могут быть в форме детальных отчетов, или они могут быть резюмированы в виде визуальной презентации, например, интерактивная диаграмма. Результаты могут быть использованы для показа исторических эксплуатационных параметров или современных эксплуатационных параметров машин, работающих на рабочем месте 10. Альтернативно или дополнительно результаты могут быть использованы для прогнозирования выполнения работ на рабочем месте 10 и оценки времени, перед тем как производительность и/или эффективность отдельного оператора машины, группы машин или рабочего места 10 превысит или упадет ниже заданного предела. То есть результаты могут показывать оцениваемое время перед тем, как появится нарушение нормальной производительности. Аналогично, контроллер 28 может выдать пользователю флажок состояния во время возникновения нарушения нормальной работы или во время анализа стадии, при которой нарушение было впервые обнаружено.
В настоящем описании «нарушение нормальной производительности» может быть определено как отклонение от первоначальной или ожидаемой производительности и/или эффективности, связанное с параметром, который отслеживается, рассчитывается или другим образом принимается системой 26 контроля производительности. В одном варианте осуществления изобретения величина отклонения, требуемая для классификации нарушения нормальной работы, может быть установлена оператором машины, пользователем системы 26 контроля производительностью, собственником бизнеса или другим ответственным лицом. В некоторых ситуациях нарушение нормальной производительности может быть показателем отказа системы, неисправности или упущения руководства, на которое следует обратить внимание, чтобы гарантировать продолжительную работу и рентабельность рабочего места 10. В других ситуациях нарушение нормальной производительности может указывать на состояние места, в отношении которого может быть осуществлена небольшая регулировка, но которое все еще может быть приспособлено для того, чтобы улучшить рентабельность рабочего места 10.
Когда обнаружено нарушение нормальной производительности (или приближение к нарушению нормальной производительности), основываясь на анализе, контроллер 28 может сравнить результаты для поиска причины нарушения. Например, контроллер 28 может определить, какой из факторов, среди которых: состояние места, состояние машины и состояние оператора - имел, имеет или будет иметь самое большое влияние на нарушение (т.е. какое из состояний является доминирующей причиной нарушения). Состояние места может включать в себя: погодные условия, состояние материала, состояние территории или другой параметр состояния места, известный в данной области техники. Состояние машины может включать в себя: срок службы машины, состояние технического обслуживания машины, состояние ремонта машины или другое подобное состояние. Состояние оператора может включать в себя: уровень опыта оператора, уровень его мастерства, способность выполнять несколько задач, осведомленность о машине или рабочем месте или другое, относящееся к оператору состояние. Контроллер может быть выполнен таким образом, чтобы определять самую вероятную причину нарушения (т.е. какой из следующих параметров: состояние места, состояние машины и состояние оператора, имеет самое большое влияние на нарушение) с помощью анализа (т.е. сравнения) собранных данных, согласно определенным индексам (т.е. с помощью определения тенденции изменения данных).
В одном примере контроллер 28 может анализировать или определять тенденцию, исходя из собранных данных в соответствии с общей идентификацией машины. В частности, контроллер 28 может сравнивать производительность или эффективность одной группы машин с другой, родственной группой машин (например, производительность или эффективность землеройных машин 12 по отношению к погрузочным машинам 14, которые загружают материал, вынутый землеройными машинами 12). Основываясь на сравнении, если обе группы родственных машин испытывают аналогичные нарушения, то контроллер 28 может заключить, что состояние места, с наибольшей вероятностью, оказывает влияние на обе группы машин. То есть обе группы машин, вероятно, подвергаются аналогичным условиям за пределами возможности их управления, что является причиной низкой производительности. Однако в противоположном случае, если только одна группа машин, например, только погрузочные машины 14, испытывают нарушение нормальной производительности, то контроллер 28 может заключить, что нарушение, вероятно, происходит из-за одной отдельной группы машин или операторов этой отдельной группы машин. Например, возможно, что землеройные машины 12 в недостаточной мере обрабатывают материал для его оптимального удаления взаимодействующими с ними погрузочными машинами 14. В результате, даже в том случае, когда землеройные машины 12 могут быть высокопродуктивными, погрузочные машины 14 могут, как группа, показывать на практике более низкую относительную производительность и/или эффективность.
В родственном примере контроллер 28 может дополнительно анализировать или определять тенденции для собранных данных, согласно идентификации каждой индивидуальной машины внутри одной группы машин. То есть контроллер 28 может определять тенденции в собранных данных, в соответствии с теми машинами, которые работают в определенной области рабочего места 10 и выполняют аналогичные задачи (например, контроллер 28 может сравнивать производительность или эффективность каждой из расположенных вместе землеройных машин 12 из предыдущего примера). Основываясь на этом сравнении, если множество находящихся рядом машин показывает в работе одинаковые или аналогичные нарушения нормальной производительности, контроллер 28 может заключить и показать пользователю системы 26 контроля производительности, что состояние места, с наибольшей вероятностью, имеет самое большое влияние на нарушение нормальной производительности. То есть, если вместе находящиеся машины, выполняющие аналогичную задачу, выполняют эту задачу плохо, то причина низкой производительности, вероятно, заключается не в отдельном операторе или отдельной машине из этой группы. Поэтому причиной, с наибольшей вероятностью, является состояния места, которое влияет на все машины и на всех операторов группы.
Однако, если только небольшое количество машин, например одна, в конкретном месте показывает нарушение нормальной производительности, то контроллер 28 может заключить, что состояния места, вероятно, не является причиной низкой производительности. Вместо этого, когда контроллер 28 определяет, что количество машин, меньшее, чем пороговое значение, показывает нарушение нормальной производительности, то состояние машины или состояние оператора может быть показано пользователю системы 26 контроля производительности в качестве параметра, имеющего наибольшее влияние на произошедшее нарушение нормальной производительности.
В другом примере контроллер 28 может анализировать или определять тенденции в собранных данных в соответствии с идентификацией оператора. В частности, контроллер 28 может сравнивать производительность или эффективность каждой машины в группе, в которой, как правило, работают аналогичные машины с одинаковым заданием, сопоставляя с тем, кто работает на этих машинах в данный период (т.е. в пределах данной рабочей смены). Когда контроллер 28 определяет на основе анализа работы операторов, что у множества операторов одной и той же машины наблюдается одно и то же или аналогичное нарушение нормальной производительности, то контроллер 28 может указать пользователю системы 26 контроля производительности, что состояние машины имеет наибольшее влияние на нарушение нормальной производительности, и это нарушение не является характерной чертой отдельного оператора.
Однако, когда контроллер 28 определяет, основываясь на тенденции работы операторов, что у меньшего количества операторов, чем заданное пороговое значение, одной и той же машины наблюдается нарушение нормальной производительности, то контроллер 28 может указать, что состояние машины, с наибольшей вероятностью, не является причиной нарушения нормальной производительности. Вместо этого, когда контроллер 28 определяет, что у меньшего количества операторов, чем заданное пороговое значение, наблюдается нарушение нормальной производительности, то состояние оператора может быть указано пользователю системы 26 контроля производительности в качестве причины, имеющей наибольшее влияние на нарушение нормальной производительности.
Кроме индикации состояния, имеющего наибольшее влияние на возникновение нарушения, результаты также могут включать в себя список рекомендованных действий, которые должны выполняться, основываясь на причине нарушения. Например, основываясь на определении состояния места, контроллер 28 может рекомендовать, чтобы операции, относящиеся к определенному месту (например, землеройные или подрывные работы), осуществлялись по-другому (например, погрузочные машины 14 оборудуются более широким и более глубоким ковшом, чтобы вместить ненадлежащим образом вынутый материал), чтобы лучше приспосабливаться к условиям на месте работы. В другом примере, основываясь на состоянии машины, контроллер 28 может рекомендовать, чтобы для одной или более машин техническое обслуживание осуществлялось по-другому, чтобы она работала по-другому, или заменить эти машины, чтобы улучшить производительность и/или эффективность. Аналогично, еще в одном примере, основываясь на состоянии оператора, контроллер 28 может рекомендовать дополнительное обучение или изменение в распределении персонала.
Фиг.4 является блок-схемой последовательности процесса, изображающей типичную операцию, осуществляемую контроллером 28 для определения того, какое из состояний может иметь наибольшее влияние на нарушение нормальной производительности. Фиг.4 будет обсуждаться более подробно ниже, чтобы дополнительно проиллюстрировать систему 26 контроля производительности и ее функционирование.
Промышленная применимость
Раскрытая система может обеспечить эффективный способ контроля производительности машин на рабочем месте. В частности, раскрытый способ и система могут контролировать производительность машин на рабочем месте с помощью анализа данных, измеренных датчиками, находящимися на борту машин, которые работают на рабочем месте, а также путем выявления тенденций в полученных данных в соответствии с заданными индексами. Далее поясняется работа системы 26 контроля производительности.
Как показано на фиг.4, во время работы на рабочем месте 10, данные от различных источников, включая землеройные, погрузочные и транспортировочные машины 12-16, а также от операторов машин, могут быть собраны системой 26 контроля производительности и проанализированы для получения производительности и эффективности (шаг 100). Часть этого анализа может включать в себя индексирование или определение тенденции в изменении данных по различным критериям, например, по типу машины, идентификации машины, оператора и по времени. Основываясь на этом анализе, контроллер 28 может определять, существует ли нарушение нормальной производительности (шаг 110). Нарушение может проявляться в том случае, если производительность (т.е. продуктивность или эффективность) рабочего места 10, группы машин на рабочем месте 10, отдельной машины или отдельного оператора отличается от той, что ожидалась. Если нарушение не проявляется, то контроль может вернуться к шагу 100.
Однако в том случае, если контроллер 28 определяет, что нарушение нормальной производительности существует, контроллер 28 может сравнить собранные данные, с тем чтобы определить главный фактор или наиболее вероятную причину нарушения. Выполняя эту задачу, контроллер 28 может определить тенденцию в собранных данных по группе идентификации машины (шаг 120). Например, контроллер 28 может определить тенденцию в отношении продуктивности в сопоставлении с типом машины, например такой, как землеройная машина 12 или погрузочная машина 14. Если продуктивность землеройных машин 12 является приблизительно одинаковой или соответствует продуктивности взаимодействующих с ними погрузочных машин 14, которые работают совместно с землеройными машинами 12 (или ожидаемая продуктивность), то можно сделать вывод, что на продуктивность не оказано значительного влияния на уровне (шаг 130) группы. В такой ситуации можно сделать заключение, и оно отображается контроллером 28 на терминале 30, что главным условием, оказывающим влияние на отслеживаемое нарушение нормальной производительности, является состояние места работы.
Однако, если существует значительная разница по производительности для одной группы по сравнению с другой группой или разница с ожидаемым уровнем производительности, то может быть сделано дополнительное сравнение. Например, контроллер 28 может определить тенденции в собранных данных в соответствии с идентификацией индивидуальных машин в отдельной группе (шаг 150). То есть внутри группы погрузочных машин 14 производительность отдельных машин может быть подвергнута анализу, после чего она сравнивается, с тем чтобы определить, имеют ли отдельные машины отрицательную тенденцию по производительности или эффективности (шаг 160). Если никакого влияния на уровне отдельных машин не наблюдается, то контроллер 28 может снова заключить, что на нарушение нормальной производительности с наибольшей вероятностью оказывает влияние состояние места работы (шаг 140).
Однако в противном случае, если может быть замечено влияние на одну машину, могут быть сделаны дополнительные сравнения (шаг 170). То есть контроллер 28 может определить тенденцию в собранных данных в соответствии с индивидуальными показателями операторов отдельных машин, с тем чтобы определить, влияют ли операторы на нарушение нормальной производительности (шаг 180). Если после проведения трендового анализа данных по оператору никакого значительного влияния не наблюдается, то контроллер 28 может заключить, что на нарушение нормальной производительности оказывает наибольшее влияние состояние отдельной машины (шаг 190). Однако, если влияние может быть замечено после проведения трендового анализа по оператору, то контроллер 28 может вместо этого заключить, что на нарушение нормальной производительности оказывает наибольшее влияние состояние оператора.
Поскольку раскрытая система контроля производительности может сравнивать данные из множества источников на уровне рабочего места, на уровне группы машин, уровне машины и уровне оператора, то нарушение нормальной производительности можно легко распознавать. Основываясь на тенденциях, наблюдаемых в отношении производительности, факторы, оказывающие влияние на нарушение, могут быть идентифицированы и отрегулированы. Таким образом, показатели рабочего места, машины и оператора могут быть улучшены.
Специалистам в данной области техники будет очевидно, что различные модификации и вариации могут быть сделаны в раскрытой системе контроля производительности, при этом оставаясь в рамках объема этого раскрытого изобретения. Другие варианты осуществления изобретения будут очевидны специалистам в данной области техники из рассмотрения описания изобретения и практического использования системы контроля производительности. Предполагается, что описание изобретения и примеры рассматриваются только как показательные, при этом реальный объем изобретения отображается следующей ниже формулой изобретения.

Данная группа изобретений относится к средствам контроля производительности машин, работающих на общем рабочем месте. Технический результат заключается в повышении точности определения фактора, оказывающего наибольшее влияние на нарушение нормальной производительности. Для этого предложена система контроля производительности множества машин, работающих на общем рабочем месте, содержащая: по меньшей мере один модуль сбора данных, выполненный с возможностью отслеживать производительность множества машин; и контроллер, взаимодействующий с указанным по меньшей мере одним модулем сбора данных и выполненный с возможностью: собирать данные по производительности машин из указанного по меньшей мере одного модуля сбора данных; выявлять нарушение нормальной производительности на основе собранных данных по производительности машин; сравнивать собранные данные по производительности машин; и определять на основе сравнения, какой из следующих факторов: состояние машин, состояние оператора или состояние места - оказывает наибольшее влияние на нарушение нормальной производительности. 2 н. и 8 з.п. ф-лы, 4 ил.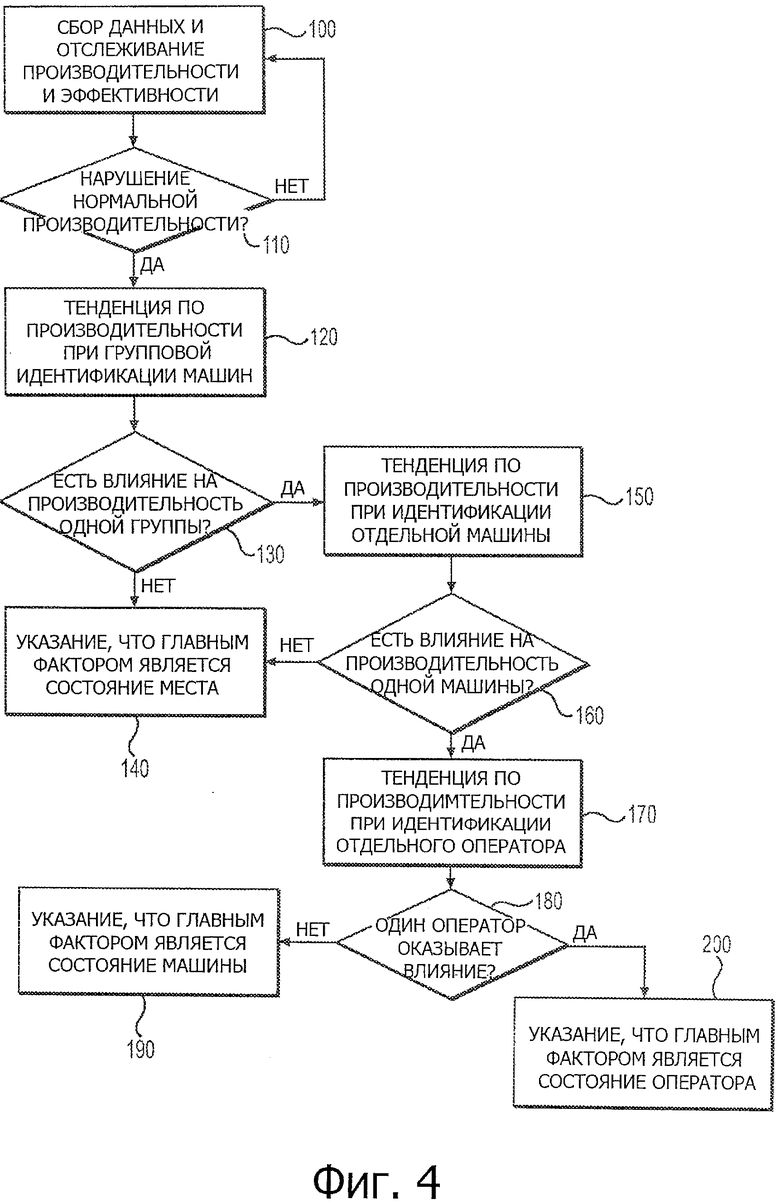
1. Система (26) контроля производительности множества машин (12-16), работающих на общем рабочем месте (10), содержащая:
по меньшей мере один модуль (20) сбора данных, выполненный с возможностью отслеживать производительность множества машин; и
контроллер (28), взаимодействующий с указанным по меньшей мере одним модулем сбора данных и выполненный с возможностью:
собирать данные по производительности машин из указанного по меньшей мере одного модуля сбора данных;
выявлять нарушение нормальной производительности на основе собранных данных по производительности машин;
сравнивать собранные данные по производительности машин и
определять на основе сравнения, какой из следующих факторов: состояние машин, состояние оператора или состояние места - оказывает наибольшее влияние на нарушение нормальной производительности.
2. Система контроля производительности по п.1, в которой:
сравнение собранных данных по производительности машин включает определение тенденций в данных по производительности машин в соответствии с идентификацией машин и,
если контроллер на основании указанных тенденций устанавливает, что многие из указанного множества машин показывают нарушение нормальной производительности, контроллер показывает, что наибольшее влияние на нарушение нормальной производительности оказывает состояние места.
3. Система контроля производительности по п.1, в которой:
сравнение собранных данных по производительности машин включает определение тенденций в данных по производительности машин в соответствии с идентификацией машин и,
если контроллер на основании указанных тенденций устанавливает, что количество машин из указанного множества машин, имеющих нарушение нормальной производительности, составляет число, меньшее, чем пороговое значение, контроллер показывает, что наибольшее влияние на нарушение нормальной производительности оказывает состояние машины или состояние оператора.
4. Система контроля производительности по п.3, в которой:
сравнение собранных данных по производительности машины дополнительно включает определение тенденций в данных по производительности машины в соответствии с оператором и,
если контроллер на основании указанных тенденций устанавливает, что множество операторов одной и той же машины из указанного множества машин имеют нарушение нормальной производительности, контроллер показывает, что наибольшее влияние на нарушение нормальной производительности оказывает состояние машины.
5. Система контроля производительности по п.3, в которой:
сравнение собранных данных по производительности машины дополнительно включает определение тенденций в данных по производительности машин в соответствии с оператором и,
если контроллер на основании указанных тенденций устанавливает, что количество операторов одной и той же машины из указанного множества машин, имеющих нарушение нормальной производительности, составляет число, меньшее, чем пороговое значение, контроллер показывает, что наибольшее влияние на нарушение нормальной производительности оказывает состояние оператора.
6. Система контроля производительности по п.1, в которой:
состояние места представляет собой состояние погоды, или состояние материала, или состояние территории;
состояние машины представляет собой показатель срока службы машины, или состояние технического обслуживания машины, или состояние ремонта машины и
состояние оператора представляет собой уровень квалификации или уровень мастерства.
7. Способ контроля производительности множества машин (12-16) на общем рабочем месте (10), характеризующийся тем, что:
собирают данные по производительности машины, связанные с каждой из множества машин;
выявляют нарушение нормальной производительности на основе собранных данных по производительности машины;
сравнивают собранные данные по производительности машины и
определяют на основе сравнения, какой из следующих факторов: состояние машины, состояние оператора или состояние места - оказывает наибольшее влияние на нарушение нормальной производительности.
8. Способ по п.7, в котором:
при сравнении собранных данных по производительности машины определяют тенденции в данных по производительности машин в соответствии с идентификацией машин; и
если на основании указанных тенденций установлено, что многие из указанного множества машин обнаруживают нарушение нормальной производительности, то это показывает, что наибольшее влияние на нарушение нормальной производительности оказывает состояние места.
9. Способ по п.7, в котором:
при сравнении собранных данных по производительности машины определяют тенденции в данных по производительности машин в соответствии с идентификацией машин и,
если на основании указанных тенденций установлено, что количество машин из указанного множества машин, имеющих нарушение нормальной производительности, составляет меньшее число, чем пороговое значение, показывают, что наибольшее влияние на нарушение нормальной производительности оказывает состояние машины или состояние оператора.
10. Способ по п.9, в котором:
при сравнении собранных данных по производительности машин дополнительно определяют тенденции в данных по производительности машин в соответствии с оператором и,
если на основании указанных тенденций установлено, что множество операторов одной и той же машины из указанного множества машин имеют аналогичные нарушения нормальной производительности, указывают, что наибольшее влияние на нарушение нормальной производительности оказывает состояние машины.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Устройство для учета и контроля работы экскаватора | 1979 |
|
SU872668A1 |
| Устройство для контроля эффективности управления процессом копания экскаватора | 1986 |
|
SU1320351A1 |

