Область техники
Предлагаемое интеллектуальное кухонное оборудование относится к области профессиональных кухонных систем, имеющих современное техническое оснащение, позволяющее успешно конкурировать в сфере робототехники, предназначенной для применения в кулинарной среде с целью приготовления различных пищевых блюд, в том числе ресторанного исполнения, блюд авторской кухни, т.е. приготовленных по заранее составленному рецепту, а также наиболее востребованных и популярных продуктов питания быстрого приготовления, к числу которых можно отнести пиццу, блины и сэндвичи.
Уровень техники
Из уровня техники известен комплекс для хранения и распределения готовых продуктов питания (см. CN 111317380, кл. A47J 44/00, публ. 2020 г. [1]).
Данный комплекс имеет прямое отношение к области автоматизированного кухонного оборудования, применяемого в профессиональной области с целью получения автоматизации сервисных услуг при эксплуатации систем общественного питания в местах общего пользования.
Анализируемый кулинарный агрегат [1] содержит ряд базового оборудования необходимого для реализации возложенного функционала, к числу которого можно отнести пищевую распределительную систему, а также связанную с ней систему хранения и подачи составленных и приготовленных продуктовых заказов.
Контроль взаимодействующего между собой оборудования осуществляет центральная компьютерная система, которая формирует нужные команды, а также следит за выполняемыми операциями, в том числе курирует работу транспортировочной системы.
В свою очередь транспортировочная система выполнена в виде робота-манипулятора с захватным приспособлением для удержания и установки пищевых заказов.
Известный агрегат [1] по существу совмещает в себе функциональные возможности приготовления пищи с последующей возможностью их временного хранения и поочередного распределения по мере их идентификации, что становится возможным и проявляется вследствие доставки готовых продуктовых наборов на участок пользовательского доступа и их захвата по мере потребительской необходимости.
Рассматриваемый пищевой агрегат [1] может не найти успешного применения в качестве отдельного использования в виде самостоятельного комплекса, т.к. его конструктив и технические аспекты ориентированы на взаимодействие с группой совмещенного пищевого оборудования, что в технологическом плане может положительно влиять на промышленный производственный потенциал, но вместе с тем указанная особенность может приводить к трудностям, связанным со сложностью интеграции и взаимодействия между собой задействованных подсистем, сопровождающихся конфликтом архитектур программного обеспечения различных производителей.
Дополнительным недостатком следует указать нестандартную конструкцию, а также специализированное назначение, а также необходимость изготовления сменных частей под заказ, что значительно усложняет создание налаженного и унифицированного производственного процесса и собственно не создает выгодных условий для серийного производства техники данного типа.
Из уровня техники известен кулинарный робототехнический комплекс (см. KR 20190106893, кл. А23Р 30/10, публ. 18.09.2019 г. [2]).
Известная система [2] имеет узкоспециализированный профиль и способна перерабатывать поступающие в нее продукты питания и преобразовывать их в относительно твердую и компактную форму, подходящую для транспортировки, в том числе на дальние расстояния.
Основополагающими компонентами известной системы [2] является пищевая распределительная система и взаимодействующая с ней система транспортировки продуктов питания.
Значимыми особенностями системы, определяющими ее предназначение и особенности эксплуатации, является выполнение распределительной системы в виде адаптивного робота-манипулятора в виде аналога рук человека, создающих имитацию ручного труда за счет работы систем искусственного интеллекта, что в целом позволяет решать поставленные кулинарные задачи с эффективным взаимодействием с системой транспортировки пищевого сырья, выполненной в виде комплекса взаимосвязанного интегрированного оборудования, размещенного на разных уровнях, включающего шнековые системы, транспортеры, распределители, дозирующие устройства и туннельные пневматические конвейеры.
Значимым недостатком исследуемой системы [2] следует считать отсутствие гарантий успеха коммерческого использования и успешного внедрения в промышленный оборот подобного рода систем, поскольку область допустимого применения весьма экспериментальна и ограничивается возможностью переработки продуктов в удобный для трансфера вариант, что может вызывать спрос у логистических компаний, однако с экономической точки зрения стабильный спрос и рентабельность на такие услуги вряд ли возможны.
Дополнительным недостатком следует признать чрезвычайную сложность практического создания и успешного применения имитатора-робота человеческих рук, способного полноценно заменить ручной труд биологического организма, и как следствие неспособность обеспечения высокой точности повторений, манипуляций и чувствительности движений, свойственных человеку, что обосновывается тем, что руки человека обладают по существу неограниченным потенциалом, имеют множество рецепторов, а также возможность совершения неограниченного количества движений, комбинаций и различных манипуляций, а существующий в настоящее время уровень технического прогресса (развития) не способен повлиять на создание искусственного аналога, способного в полной мере воспроизводить возможности человека, в частности, полноценно замещать способности человеческих рук, включая успешное восприятие обучения и принятие самостоятельных решений, несогласованных с установленным программным обеспечением.
Наиболее близкой в отношении технической сущности к заявляемому изобретению является автоматизированная кухонная система (см. CN 109725559, кл. G05B 19/042, публ. 2019 г. [3]).
Известная система [3] в техническом понимании затрагивает автоматизацию процессов приготовления, транспортировки и хранения пищи, а также их рационального объединения в одной системе.
Рассматриваемая система [3] управляется компьютером и содержит пищевую распределительную систему и взаимодействующую с ней транспортировочную систему, при этом распределительная система включает средства распределения пищевого содержимого, а транспортировочная система содержит в составе двух-координатный рабочий стол.
Согласно особенности авторского замысла, пищевая распределительная система делится на подсистему приготовления пищи, а также на первую и вторую системы передачи, при этом транспортировочная система делится на две подсистемы, объединенные в единой структурной единице, кроме того имеется система хранения для временного нахождения и поддержания товарного вида получаемых продуктовых изделий.
Техническое решение [3] включает в себя основные операции, связанные с производством готовых к непосредственному употреблению пищевых блюд.
В практическом понимании пищевая система [3] может быть адаптирована преимущественно для применения в заводских условиях, поскольку нуждается во взаимодействии с погрузочной техникой, а также имеет промышленное исполнение и потенциал, сопоставимый с объемами продукции, выпускаемыми промышленными предприятиями, что по совокупности определяет зависимое положение системы и указывает о нежелательности и неэффективности ее использования в автономных пунктах общественного питания или в виде отдельного пищевого блока, способного эксплуатироваться в автономном режиме.
Также известная система [3] имеет сложное конструктивное выполнение, а также большое количество нестандартных и узкопрофильных частей и подсистем, настройка и эксплуатация которых будет требовать постоянного мониторинга и желательного проведения обслуживающих технических работ, что в обязательном порядке потребует привлечения больших ресурсов для создания и обслуживания данного уровня и масштаба технологических установок, оправданность сбора которых в условиях постоянной рыночной конкуренции не может быть гарантирована.
Раскрытие изобретения
Технической проблемой предлагаемого изобретения является создание интеллектуальной кухонной машины, воплощающей возможности по созданию пищевых блюд по индивидуальным авторским рецептам, обеспечивая при этом рыночную конкурентоспособность и высокие эксплуатационные показатели.
Техническим результатом предлагаемого изобретения, решающим поставленную техническую проблему, является реализация назначения по созданию управляемой компьютерной системой робототехнической кулинарной машины, способной в высокоскоростном режиме с сохранением надлежащего качества создавать широкий ассортимент пищевых блюд, приготовленных на основании авторских рецептурных данных.
Заданный технический результат и актуальная техническая проблема достигаются в результате того, что интеллектуальный кулинарный комплекс по неотложному приготовлению индивидуальных пользовательских заказов содержит пищевую распределительную систему и взаимодействующую с ней транспортировочную систему, при этом пищевая распределительная система выполнена в виде набора роботизированных дозировочных модулей, порционно пополняющих съедобными компонентами заданное количество поступивших продуктовых заготовок, согласно определенному рабочему циклу, а транспортировочная система выполнена, по меньшей мере, из двух роботизированных функционально скоординированных между собой двух-координатных грузовых столов, установленных на оборудованном опорном путевом средстве, со стороны концевых участков которого размещены периферийные площадки для временного базирования в ходе рабочего процесса двух-координатных грузовых столов, перемещение которых, в том числе совместное, возможно по заранее согласованному персональному погрузочному пути, контролируемому интеллектуальным устройством управления в соответствии с принятыми и обработанными заранее параметрами заказанного пищевого блюда, имеющего возможность полного или частичного перемещения за счет оборудованных средств передачи с независимо-подвижной рабочей площадки одного двух-координатного грузового стола на независимо-подвижную рабочую площадку другого двух-координатного грузового стола.
По одному из наиболее предпочтительных вариантов исполнения изобретения опорное путевое средство может быть выполнено в виде двух статично установленных направляющих.
Является целесообразным, если статично установленные направляющие конструкционно адаптированы для взаимодействия с роликовыми механизмами.
По одному из наиболее перспективных вариантов исполнения предлагаемого изобретения независимо-подвижная рабочая площадка двух-координатных грузовых столов устанавливается на основании и имеет нижнюю часть, которая перемещается в продольном направлении и верхнюю часть, которая перемещается в поперечном направлении.
Согласно частным вариантам исполнения изобретения двух-координатные грузовые столы могут быть оснащены средствами мониторинга качества продукции, которые могут представляться в виде фото и/или видео камер.
В соответствии с перспективными вариантами реализации изобретения используемое интеллектуальное устройство управления может анализировать поступающие изображения от средств мониторинга качества продукции, и в дальнейшем вырабатывать в случае неполного эталонного соответствия продукции запрограммированные командные сигналы, активирующие необходимые режимы работы оборудования, направленные на устранение недостатков продукции.
Используемые в изобретении продуктовые заготовки могут быть изготовлены из теста, являются предпочтительно плоскими и, как правило, имеют круглую и/или овальную и/или прямоугольную и/или квадратную конфигурацию.
Является наиболее рациональным, если роботизированные дозировочные модули пищевой распределительной системы устанавливаются последовательно в ряд и содержат сыпучие, пастообразные, твердые, полутвердые, а также жидкие пищевые добавки и ингредиенты.
При этом указанные пищевые добавки и ингредиенты могут содержать мясо и/или колбасные изделия и/или ветчину и/или рыбу и/или сыр и/или овощи и/или фрукты и/или ягоды и/или зелень и/или соус и/или специи и/или масло и/или сироп и/или крупы и/или тесто.
Является наиболее разумным и рациональным, если используемые в изобретении средства передачи продукции будут оборудованы на рабочих площадках грузовых двух-координатных столов и будут выполняться в виде автоматических электроприводных систем, горизонтально перемещаемые подаватели которых активируются при условии соприкосновения двух-координатных столов друг с другом.
Возможен вариант реализации изобретения, когда дополнительно рабочая площадка двух-координатных грузовых столов устанавливается с возможностью вращения вокруг оси.
По одному из допустимых вариантов реализации изобретения двух-координатные грузовые столы могут содержать контрольные весы для точного измерения веса продукции.
По одному из частных вариантов реализации предлагаемого изобретения используемые периферийные площадки могут быть оснащены средствами изъятия некачественных продуктовых заготовок.
Согласно выработанной изобретательской концепции, предлагается вниманию современная и конкурентоспособная система для производства готовых к непосредственному употреблению пищевых блюд, приготовляемых по различным и псевдослучайным авторским рецептурам, составленным непосредственно в процессе продуктового заказа.
Технологическое новшество, по мнению автора, заключается в перспективной технологии, использующей программируемое оборудование, работающее в автоматическом режиме, и сочетает в себе робототехническую распределительную систему и робототехническую транспортировочную систему. Важно отметить, что работой имеющегося оборудования управляет интеллектуальное устройство (компьютерная система), имеющее в арсенале современное программное обеспечение, контролирующее ход работы, а также позволяющее заблаговременно производить пользовательские настройки и успешно программировать систему для работы по индивидуальному плану, необходимому для получения определенного пищевого блюда со своими присущими индивидуальными особенностями в соответствии с авторскими предпочтениями отдельного пользователя.
Базовыми особенностями предлагаемого кулинарного комплекса по неотложному приготовлению индивидуальных пользовательских заказов, которые вносят существенный вклад в имеющийся уровень техники, является сочетание отлаженной работы пищевой распределительной системы и трансопртировочной системы, при этом в соответствии с замыслом указанная пищевая распределительная система выполняется в виде набора роботизированных дозировочных модулей, а транспортировочная система выполняется в виде подсистемы, состоящей из не менее чем двух двух-координатных грузовых столов, согласованное пространственное движение которых определяет и координирует интеллектуальное устройство управления.
Особое внимание, с точки зрения изобретательского замысла, следует уделить упомянутой подсистеме двух-координатных грузовых столов, установленных на опорном путевом средстве, имеющем периферийные площадки для временного базирования в непосредственном рабочем процессе самих двух-координатных грузовых столов, перемещение которых, в том числе совместное (соединенное), становится возможным по заранее согласованному персональному погрузочному пути, контроль действия которого осуществляется интеллектуальным устройством управления.
В функциональном отношении применяемые двух-координатные грузовые столы имеют возможность, за счет оборудованных средств передачи продукции, передавать целые блюда или отдельные компоненты пищевого блюда с рабочей площадки одного грузового стола на рабочую площадку другого грузового стола.
В техническом отношении использование в предлагаемом интеллектуальном кулинарном комплексе, управляемом интеллектуальным устройством, комбинированной системы, состоящей из взаимосвязанных между собой двух основных подсистем, отвечающих за распределение пищевых ингредиентов, позиционирование продуктовых заготовок, а также за перемещение основ по заложенному уникальному производственному пути с обращением на участки временного базирования (пребывания), позволяет получить интеллектуальную кухонную машину, способную создавать блюда согласно авторскому видению, при этом работающую преимущественно согласно коррекционному рабочему циклу, особенности работы которого заключаются в контролируемом и дозируемом распределении пищевых компонентов на продуктовых основах, выработке погрузочного пути, включая возможное нахождение основ в периферийных пунктах временного (кратковременного) пребывания и возможного контролируемого перемещения целых блюд или отдельных их компонентов с одного двух-координатного грузового стола на другой двух-координатный грузовой стол, что способствует увеличению скорости формирования конечного блюда и правильной организации движения оборудования, и вместе с тем сохраняет заданные рецептурные требования с получением качественной продукции, а благодаря высокой позиционной точности нанесения ингредиентов и контролируемой автоматикой корректной организации их нанесения обеспечивается качественный баланс пищевого сырья, что в свою очередь формирует основу изделия и определяет его окончательный внешний вид.
В инженерном отношении переход пищевых компонентов с одного двух-координатного грузового стола на другой обусловлен тем, что нет необходимости одному грузовому столу вести одну и туже продуктовую заготовку до конечного маршрута, поскольку это может сделать второй грузовой стол, а в момент передачи первый стол уже может получать команду от интеллектуального устройства на забор другой продуктовой заготовки для формирования следующего заказанного пищевого блюда, кроме того в условиях преимущественного реверсивного движения интеллектуальную работу столов можно дополнительно регулировать с помощью периферийных площадок, где стол пережидает (отстаивается) момент, когда другому столу по техническим причинам нужно пройти по всей длине путевого средства, что в свою очередь существенно и комплексно повышает производительность труда, обеспечивая повышение скорости работы, сохраняя производственное качество на должном высоком уровне, свойственному технологичному роботизированному оборудованию.
Таким образом, предлагаемое выше конструктивное выполнение заявляемого интеллектуального кулинарного комплекса по неотложному приготовлению индивидуальных пользовательских заказов, с учетом его характеристик и технических особенностей, образует совокупность признаков достаточных для достижения заданного технического результата, заключающегося в реализации назначения по созданию управляемой компьютерной системой робототехнической кулинарной машины, способной в высокоскоростном режиме с сохранением надлежащего качества создавать широкий ассортимент пищевых блюд, приготовленных на основании авторских рецептурных данных, и собственно для решения актуальной технической проблемы по получению умной машины для профессиональной кухни, воплощающей возможности по созданию пищевых блюд авторского акцента, обеспечивая при этом рыночные преимущества и высокие технические характеристики.
Краткое описание чертежей
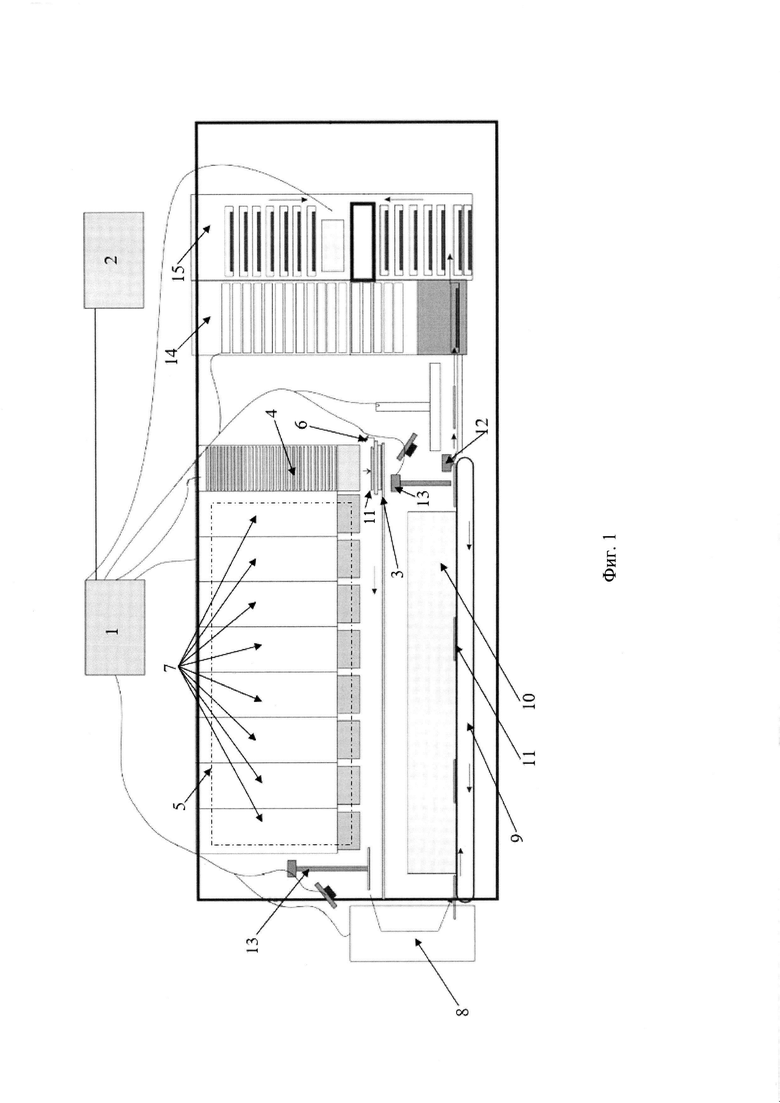
На фиг. 1 представлена общая схема предлагаемого интеллектуального кулинарного комплекса;
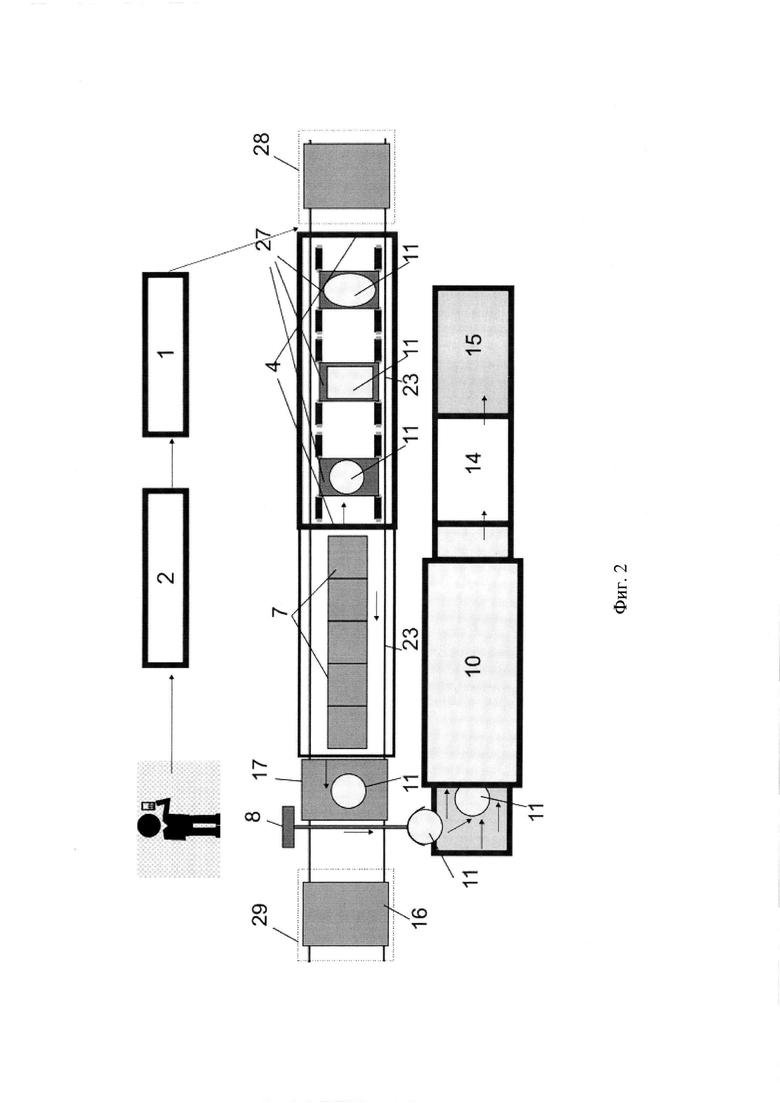
На фиг. 2 представлена блок-схема вида сверху на предлагаемый интеллектуальный кулинарный комплекс;
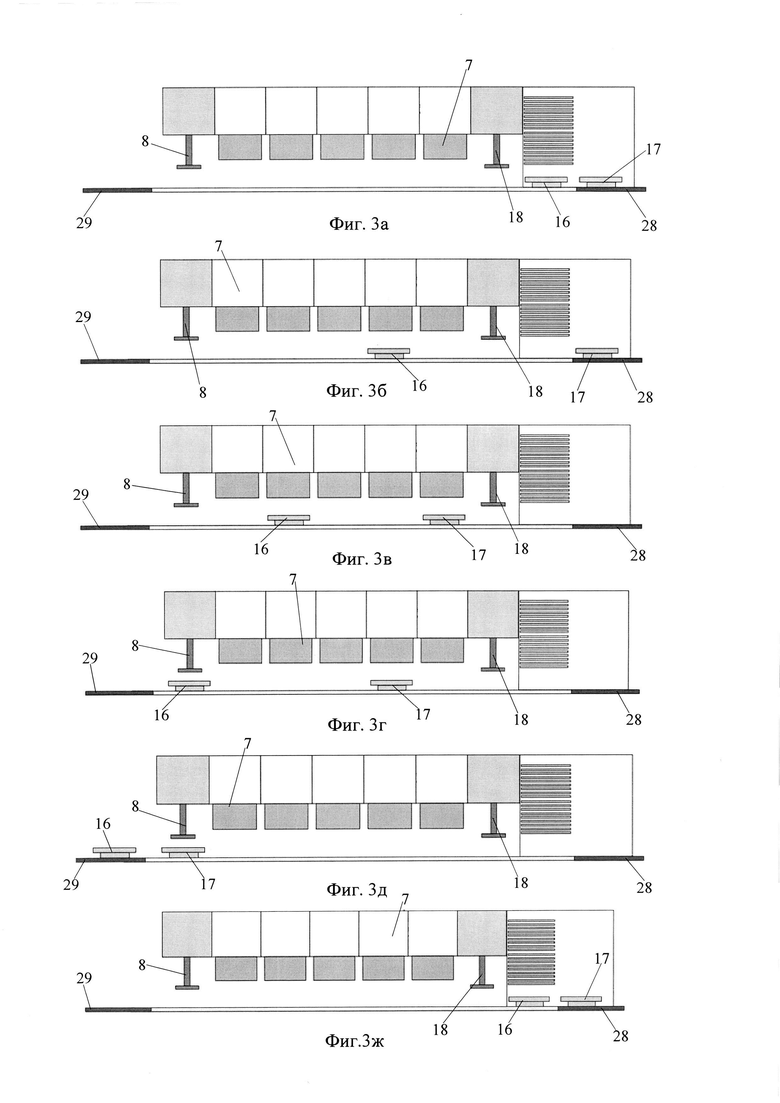
На фиг. 3а, 3б, 3в, 3г, 3д и 3ж представлены схемы, поясняющие работу грузовых столов, без передачи продуктовой основы друг другу;
На фиг. 3а - представлен вариант, когда происходит ожидание заказа;
На фиг. 3б - представлен вариант, когда поступил первый заказ и на одном грузовом столе его собирают;
На фиг. 3в - представлен вариант, когда поступил второй заказ и их собирают одновременно на двух столах;
На фиг. 3г - представлен вариант, когда заказ собран и стол готов к его последующей передаче, а другой стол собирает другой заказ;
На фиг. 3д - представлен вариант, когда один из столов ожидает команды на периферийном участке ожидания, а другой стол готов к последующей передаче заказа;
На фиг. 3ж - представлен вариант, когда оба заказы переданы и оба стола готовы к сбору очередных заказов;
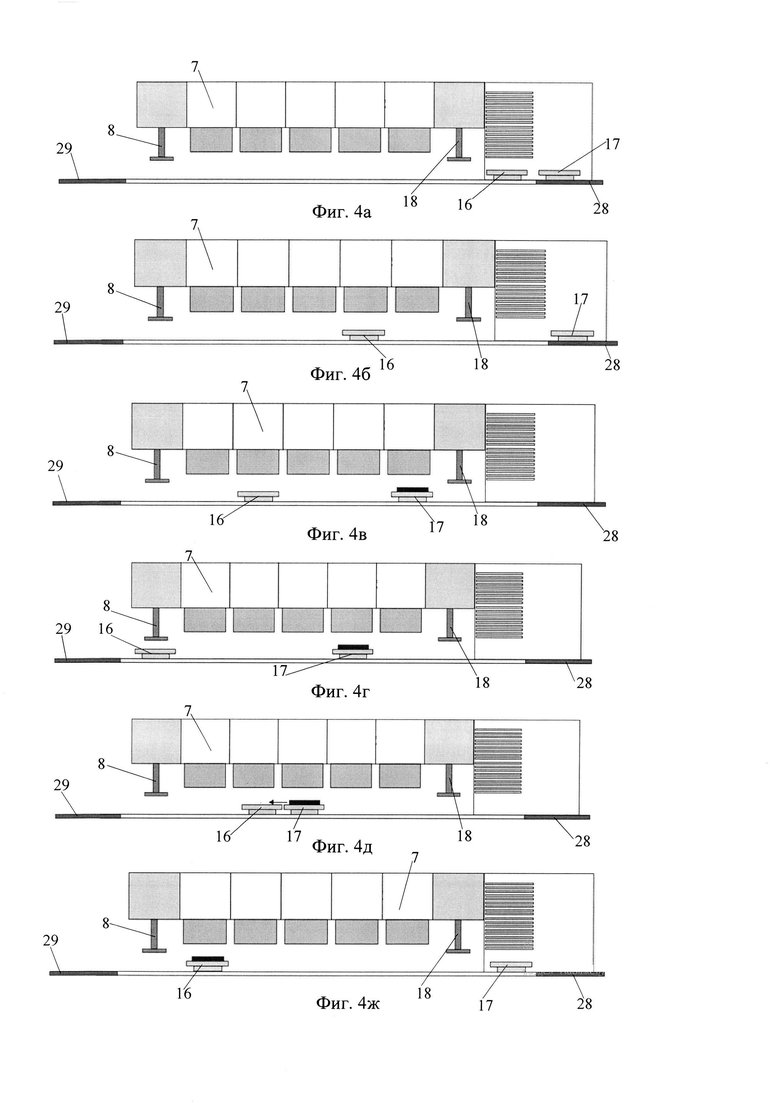
На фиг. 4а, 4б, 4в, 4 г, 4д и 4ж представлены схемы, поясняющие работу грузовых столов с передачей заказа с одного стола на другой;
На фиг. 4а - представлен вариант, когда происходит ожидание заказа;
На фиг. 4б - представлен вариант, когда поступил первый заказ и на одном из столов его собирают;
На фиг. 4в - представлен вариант, когда поступил второй заказ и оба заказа собираются одновременно на двух столах;
На фиг. 4г - представлен вариант, когда один из столов собрал заказ и передает его на следующий этап, а другой стол продолжает собирать свой заказ;
На фиг. 4д - представлен вариант, когда пустой стол подъезжает к другому столу и последний передает частично собранный заказ на упомянутый пустой стол;
На фиг. 4ж - представлен вариант, когда один из столов собирает полностью заказ, который ранее был на другом столе, который в это время ожидает поступление очередного заказа;
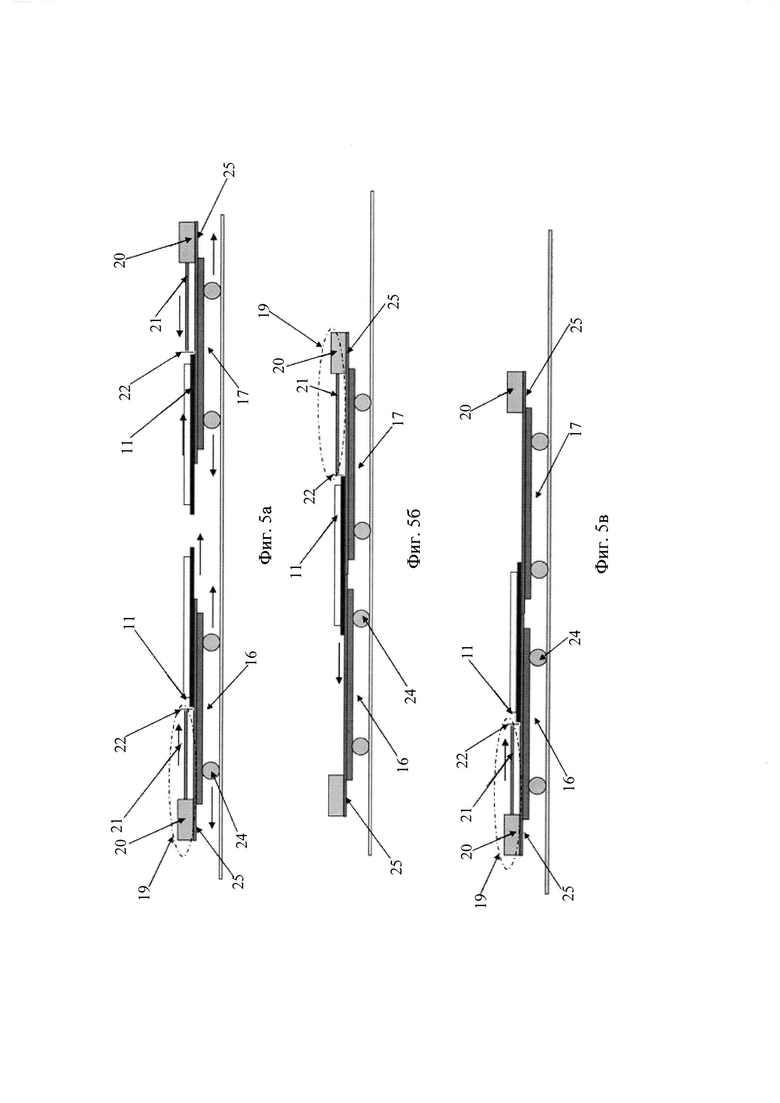
На фиг. 5а, 5б и 5в представлена возможность взаимодействия двух-координатных грузовых столов между собой;
На фиг. 5а - представлена пара столов с установленными на них приводными системами;
На фиг. 5б - показано, как заготовка передается влево с одного стола на другой;
На фиг. 5в - показано, как заготовка передается вправо с одного стола на другой;
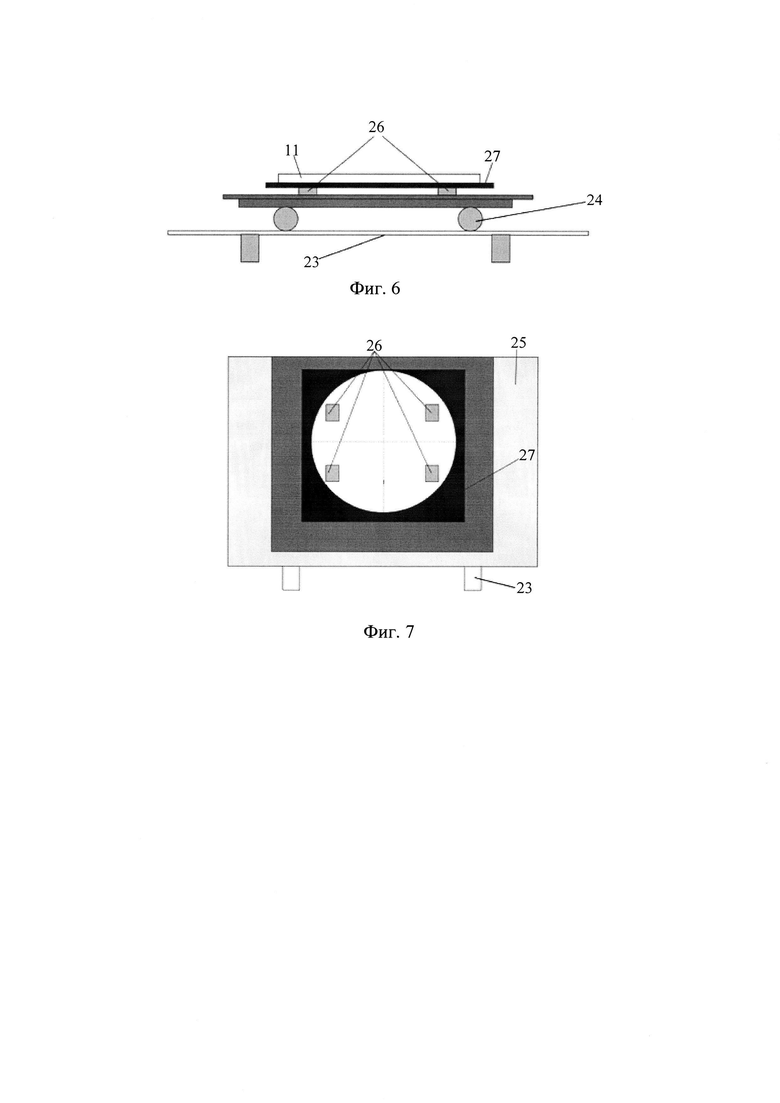
На фиг. 6 - показан вид сбоку одного из грузовых столов;
На фиг. 7 - показан вид сверху одного из грузовых столов.
Осуществление изобретения
Предлагаемое изобретение поясняется конкретным примером выполнения и реализации, которые, однако, не являются единственно возможными, но наглядным образом демонстрируют достижение указанной совокупностью существенных признаков заданного технического результата, а также решение существующей технической проблемы.
На перечисленных фигурах представлены следующие части и элементы предлагаемого интеллектуального кулинарного комплекса:
1 - интеллектуальное устройство управления;
2 - центральный обслуживающий сервер;
3 - транспортировочная система;
4 - система временного хранения и выдачи заготовок;
5 - пищевая распределительная система;
6 - средство мониторинга качества продукции;
7 - набор дозировочных модулей;
8 - средство передачи продукции;
9 - ленточное транспортировочное устройство;
10 - печная установка;
11 - продуктовая заготовка;
12 - элемент передачи продукции;
13 - исполнительные элементы изъятия некачественной продукции;
14 - упаковочная подсистема;
15 - подсистема хранения и выдачи готового и упакованного продукта;
16 - первый двух-координатный грузовой стол;
17 - второй двух-координатный грузовой стол;
18 - средство передачи продукции на упаковку;
19 - электроприводная автоматическая система;
20 - толкатель;
21 - перемещаемый подаватель;
22 - упор подавателя;
23 - направляющие;
24 - роликовые механизмы;
25 - независимо-подвижные рабочие площадки;
26 - контрольные весы;
27 - металлическое основание;
28 - первая площадка временного базирования;
29 - вторая площадка временного базирования.
Итак, предлагаемый кулинарный комплекс по неотложному приготовлению индивидуальных пользовательских заказов содержит пищевую распределительную систему 5 и взаимодействующую с ней транспортировочную систему 3.
Пищевая распределительная система 5 выполнена в виде набора роботизированных дозировочных модулей 7, которые порционно пополняют съедобными компонентами и ингредиентами заданное количество поступающих продуктовых заготовок 11, движение которых обозначено по установленному рабочему циклу.
Транспортировочная система 3 выполнена из двух роботизированных двух-координатных грузовых столов 16 и 17 соответственно, которые установлены на оборудованном опорном путевом средстве, выполняемом в виде статично установленных профильных направляющих 23.
Со стороны концевых участков профильных направляющих 23 размещены периферийные площадки 28 и 29 для кратковременного базирования двух-координатных грузовых столов 16 и 17 соответственно. Базирование осуществляется преимущественно в ходе рабочего процесса.
Движение двух-координатных столов 16 и 17, в том числе и совместное, происходит по заранее определенному индивидуальному погрузочному пути, контролируемому интеллектуальным устройством управления 1, которое подключено к центральному обслуживающему серверу 2.
Важно отметить, что согласованный заранее персональный погрузочный путь контролируется указанным интеллектуальным устройством управления 1 в соответствии с принятыми и обработанными заранее параметрами и особенностями заказанного пользователем пищевого блюда.
Приготавливаемое пищевое блюдо, согласно изобретению, имеет возможность полного или частичного перемещения за счет оборудованных средств передачи с независимо-подвижной рабочей площадки 25 одного двух-координатного грузового стола на независимо-подвижную рабочую площадку 25 другого двух-координатного грузового стола.
Оборудованные средства передачи выполнены в виде автоматических электроприводных систем 19 и, как вариант, установлены на независимо-подвижных рабочих площадках 25 и состоят из толкателя 20, перемещаемого подавателя 21 и упора подавателя 22. При этом горизонтально перемещаемый подаватель 21 активируется при условии соприкосновения двух-координатных грузовых столов 16 и 17 друг с другом, в результате чего под действием упора подавателя 22 происходит перемещение продуктовой заготовки 11 с одного стола на другой.
В данном примере реализации независимо-подвижная рабочая площадка 25 двух-координатных грузовых столов 16 и 17 установлена на основании и имеет нижнюю часть, которая перемещается в продольном направлении и верхнюю часть, которая перемещается в поперечном направлении.
Двух-координатные грузовые столы 16 и 17 оснащены средством мониторинга качества продукции 6, которое выполнено в виде цифровой видео-камеры, передающей информацию в интеллектуальное устройство управления 1. В этом случае устройство управления 1 анализирует информацию и вырабатывает в случае неполного эталонного соответствия продукции запрограммированные командные сигналы, активирующие необходимые режимы работы оборудования, направленные на устранение недостатков продукции.
Двух-координатные грузовые столы 16 и 17 также оснащены контрольными весами 26.
Работает предлагаемый интеллектуальный кулинарный комплекс следующим образом.
Следует отметить, что цель последующего описания предлагаемого изобретения заключается не в его ограничении конкретным вариантом реализации, а наоборот в охвате всевозможных дополнений, не выходящих за рамки представленной формулы изобретения.
Управление производственным процессом осуществляется интеллектуальным устройством 1, которое связано с центральным обслуживающим сервером 2, подключенным к сети интернет.
Интеллектуальное управляющее устройство 1 и центральный обсуживающий сервер 2 имеют возможности пользования программным обеспечением, с помощью которого обеспечивается передача информации о поступающих заказах и о работе оборудования предлагаемого интеллектуального кулинарного комплекса.
Заказать определенный кулинарный продукт, например, пиццу, блины или сэндвичи, а также выбрать его наполнение и указать особенности приготовления возможно посредством программного приложения на любом электронном устройстве или же непосредственно на кулинарном комплексе, обладающем такой возможностью. Интеллектуальное управляющее устройство 1 получает соответствующий сигнал, производит его обработку и далее формирует определенный режим работы оборудования, в частности, определяет погрузочный путь транспортировочной системы 3, а именно синхронизирует работу двух-координатных грузовых столов 16 и 17, выбирает оптимальную скорость их движения, фиксирует время движения и остановок, а также определяет другие производственные параметры и определяет режимы работы пищевой распределительной системы 5, определяет дозировку компонентов, синхронизирует работу дозировочных модулей 7, проверяет наличие в них определенных пищевых ингредиентов и компонентов, а также определяет иные необходимые производственные параметры, необходимые при приготовлении конкретных пищевых блюд.
Важно отметить, что в базе данных центрального обслуживающего сервера 2 заранее заложены все возможные программы приготовления различных кулинарных изделий, включая режимы работы транспортировочной системы 3 и режимы работы пищевой распределительной системы 5.
В предлагаемом кулинарном комплексе, как правило, используются замороженные продуктовые заготовки 11 из теста, которые в основном являются плоскими и имеют круглую и/или овальную форму и/или прямоугольную форму.
После того как центральный обслуживающий сервер 2 получит сведения о заказе определенного продукта, интеллектуальное управляющее устройство 1 посредством алгоритма программного обеспечения формирует команду системе временного хранения и выдачи 4 на подачу продуктовой заготовки 11 на первый двух-координатный грузовой стол 16, что механически осуществляется посредством исполнительного механизма в виде электропривода, оборудованного поршнем с толкателем и с захватным приспособлением.
Оказавшись на независимо-подвижной рабочей площадке 25 первого двух-координатного грузового стола 16, продуктовая заготовка 11 перемещается в сторону противоположного конца участка путевых направляющих 23. В процессе движения первый двух-координатный грузовой стол 16 проезжает под необходимым набором дозировочных модулей 7, делая остановки, паузы, связанные с пополнением продуктовой заготовки 11 необходимым набором пищевых компонентов и ингредиентов, при необходимости осуществляется перемещение рабочей площадки 25 в две противоположные транспортному пути стороны, подбирая тем самым точные и четкие места для загрузки пищевыми компонентами и ингредиентами, что возможно за счет независимости движения рабочей площадки 25, которая может также вращаться вокруг своей оси. После того как все необходимые ингредиенты из дозировочных модулей 7 поступят на продуктовую заготовку 11, первый двух-координатный грузовой стол 16 перемещается в зону действия средства передачи продукции 8, которое перемещает заготовку 11 в печную установку 10.
В том случае, если первый двух-координатный грузовой стол 16 еще не закончил свое движение, и сбор ингредиентов для заготовки 11 еще производится, а на обслуживающий сервер 2 поступает информация о необходимости выполнения следующего заказа, интеллектуальное управляющее устройство 1 посредством алгоритма программного обеспечения формирует команду системе временного хранения и выдачи 4 на подачу продуктовой заготовки 11 на второй двух-координатный грузовой стол 17, который начинает свое движение в сторону противоположного конца участка путевых направляющих 23 и в сторону первого двух-координатного грузового стола 16.
После того как первый двух-координатный грузовой стол 16 закончит свою работу, и заготовка 11 будет перемещена с помощью средства передачи продукции 8 в печную установку 10, первый двух-координатный грузовой стол 16 переместится вплотную ко второму двух-координатному грузовому столу 17.
Далее, при производственной необходимости, продуктовая заготовка 11 передается с рабочей площадки 25 двух-координатного грузового стола 17 на рабочую площадку 25 соседнего двух-координатного грузового стола 16. Это осуществляется с помощью средств передачи, а именно с помощью автоматических электроприводных систем 19, горизонтально перемещаемые подаватели 21 которых активируются при условии соприкосновения двух-координатных грузовых столов между собой, при этом подаватели 21 имеют захватные упоры 22 и двигаются за счет действия толкателей 20, в результате чего частично готовая продуктовая заготовка 11 передается на рабочую площадку 25 двух-координатного рабочего стола 16. Оказавшись на рабочей площадке 25 двух-координатного грузового стола 16, продуктовая заготовка 11 продолжает свое движение по погрузочному пути, пополняясь при необходимости пищевыми ингредиентами и компонентами, согласно рецептуре, и далее согласно утвержденному плану приготовления, продуктовая заготовка 11 передается в печную установку 10 для запекания, что производится средством передачи продукции 8. Или же, в случае отсутствия в соответствии с заказом стадии запекания, продуктовая заготовка 11 передается вновь на двух-координатный грузовой стол 17 в обратной последовательности с помощью уже используемой автоматической электроприводной системы 19, после чего готовая продуктовая заготовка 11 передается в упаковочную подсистему 14 посредством средства передачи продукции 18 на упаковку, из которой упакованный продукт поступает непосредственно в подсистему 15 хранения и выдачи готового и упакованного продукта.
Также является крайне важным, что в условиях преимущественного реверсивного движения интеллектуальная работа двух-координатных грузовых столов 16 и 17 дополнительно регулируется с помощью периферийных площадок 28 и 29, где какой-либо из столов пережидает (отстаивается) момент, когда другому столу по техническим причинам нужно пройти по всей длине путевого средства, т.е. по всей длине путевых направляющих 23. Это в свою очередь существенно и комплексно повышает производительность транспортировочной системы 3, обеспечивая повышение скорости работы, сохраняя производственное качество на должном высоком уровне, свойственному технологичному роботизированному оборудованию. Примером является ситуация, когда одновременно поступают 2 заказа, в результате чего двух-координатные грузовые столы 16 и 17 одновременно загружаются продуктовыми заготовками 11 и происходит дальнейшее заполнение продуктовых заготовок 11 необходимыми ингредиентами. В такой ситуации первый грузовой стол 16 подъезжает к средству передачи продукции 8 и останавливается. Средство передачи продукции 8 передает продуктовую заготовку 11 с грузового стола 16 на рабочую часть печной установки 10. После этого, для того чтобы второй грузовой стол 17 мог передать свою заготовку 11 посредством передаточного устройства 8 на рабочую часть печной установки 10, первый грузовой стол 16 перемещается в периферийную зону 29, тем самым освобождая место для второго грузового стола 17, который после этого сможет переместиться в зону действия средства передачи продукции 8.
Еще одним примером использования периферийных площадок временного базирования 28 и 29 является ситуация, когда двух-координатный грузовой стол 16 собрал и передал заказ с помощью средства передачи продукции 8 в печную установку 10, двух-координатный грузовой стол 17 еще продолжает сбор заказа, и при этом поступает очередной заказ. В этом случае интеллектуальное управляющее устройство 1 посредством алгоритма программного обеспечения, рассчитав время завершения сбора заказов каждым из столов либо с учетом рецептуры приготовления каждого из заказов (например, отсутствие стадии запекания для продуктовой заготовки 11, расположенной на двух-координатном грузовом столе 17), принимает решение, что оптимальнее не осуществлять передачу продуктовой заготовки 11 с одного двух-координатного грузового стола на другой, а оптимальнее использовать периферийную площадку 28. Для этого двух-координатный грузовой стол 17 с частично собранным заказом перемещается на периферийную площадку 28, тем самым освобождая место для первого двух-координатного грузового стола 16, который после этого сможет переместиться в зону действия системы временного хранения и выдачи заготовок 4, получить очередную продуктовую заготовку 11 и приступить к выполнению потупившего заказа. После чего двух-координатный грузовой стол 17 завершит сбор своего заказа.
По факту завершения сбора заказов и передачи собранных заказов посредством средства передачи продукции 8 в печную установку 10 или посредством средства передачи продукции 18 в упаковочную подсистему 14 оба двух-координатных грузовых стола 16 и 17 перемещаются на периферийную площадку 28 для ожидания поступления очередных заказов.
Следует заметить, что средство передачи продукции 8 выполнено в виде поршня-толкателя с захватным приспособлением, который удерживая продуктовую заготовку 11 передает ее на ленточное транспортировочное устройство 9 печной установки 10. Средство передачи продукции 18 на упаковку также выполнено в виде поршня-толкателя с захватным приспособлением, который передает продукцию непосредственно в упаковочную подсистему 14, минуя стадию запекания в печной установке 10.
В интеллектуальное устройство управления 1 также заранее внесены данные -координаты зоны действия каждого дозировочного модуля 7, вследствие чего интеллектуальное устройство управления 1, управляя перемещением обоих двух-координатных грузовых столов 16 и 17, доставляет продуктовую заготовку 11 в строго установленное место для нанесения пищевого ингредиента.
Использование двух двух-координатных грузовых столов 16 и 17 или более в применяемой транспортировочной системе 3 с применением периферийных площадок временного базирования 28 и 29 соответственно, позволяет комплексно преодолевать трудности, связанные с использованием одного погрузочного стола и одновременным поступлением нескольких заказов, в таком случае исполнение второго заказа возможно только после того, как на одном применяемом столе собран предыдущий первый заказ, и собственно только потом он может приступить к сборке второго заказа, затем третьего и так далее. Однако если двух-координатных грузовых столов два и более, и они дополнительно имеют места внешней стоянки (в ходе рабочего процесса), то одновременно возможно исполнение двух или трех заказов, что увеличивает технологичность работы и поднимает производительность кулинарного комплекса, по меньшей мере, в два раза.
Применение описанного выше варианта передачи продуктовых компонентов с заготовками 11 с одного двух-координатного стола на другой позволяет также ускорить процесс приготовления, так как в этом случае после того как один грузовой стол закончил собирать свой заказ, и, к примеру, заказ передан для запекания в печную установку 10, другой грузовой стол не простаивает, а подъезжает к соседнему грузовому столу, на котором собирается второй заказ, забирает этот заказ себе и производит дальнейшую компоновку заказа далее. В этом случае резко увеличивается КПД применения каждого двух-координатного грузового стола, так как первый стол не простаивает и практически все время выполняет полезную работу, а другой двух-координатный грузовой стол в это время возвращается на крайний участок погрузочного пути, находится преимущественно на периферийной площадке 28 и готов к получению следующего заказа.
Итак, приготовленные заказы, согласно рецептуре и установленным параметрам приготовления, поступают в упаковочную подсистему 14 или из печной установки 10 или непосредственно из транспортировочной системы 3. Причем продукция, поступающая из печной установки переносится в упаковочную подсистему 14 посредством элемента передачи продукции 12, который выполнен в виде автоматического поршня-толкателя с захватным устройством, удерживающим и направляющим продукцию, а продукция, поступающая в упаковочную подсистему 14 непосредственно из транспортировочной системы 3 передается посредством средства передачи продукции 18.
Далее упакованная продукция поступает из упаковочной подсистемы 14 в подсистему 15 хранения и выдачи готового и упакованного продукта.
Подсистема хранения 15 имеет оборудование для временного хранения и распределения готовых заказов, которые по мере необходимости подаются в окно выдачи, согласно команде, поступающей от интеллектуального устройства управления 1 в соответствии с оформленным ранее заказом.
После приготовления заказа интеллектуальное устройство управления 1 отправляет сигнал на центральный обслуживающий сервер 2, который направляет клиенту уведомление на его мобильное устройство, или другим способом, в том числе уведомляя оператора, что заказ готов и подлежит передачи конкретному заказчику.
Если заказ оформлялся дистанционно посредством сети интернет, в поступившем уведомлении содержится секретный код, позволяющий идентифицировать данного заказчика, для чего заказчик подходит к подсистеме хранения 15, вводит данный код на сенсорном экране, или подносит к считывателю системы мобильное устройство и показывает QR-код, полученный от центрального обслуживающего сервера 2.
Программа, установленная на интеллектуальном устройстве управления 1, идентифицирует данного клиента и активирует ячейку выдачи заказа, в которую поступил продукт, благодаря чему клиент получает непосредственную возможность получить выбранный им заказ.
Следует дополнительно учесть, что по меньшей мере, один двух-координатный грузовой стол 16 или 17 может содержать средство мониторинга качества продукции 6.
Во время движения двух-координатных грузовых столов 16 и 17 средство мониторинга качества продукции 6 передают в интеллектуальное устройство управления 1 информацию о внешнем виде продуктовой заготовки 11 до и после наложения пищевых ингредиентов и/или компонентов, также осуществляется контроль отсутствия посторонних предметов на продуктовой заготовке 11.
В случае определения программным обеспечением интеллектуального устройства управления 1 низкой оценки качества и недостатков анализируемой продуктовой заготовки 11, например неравномерное нанесение ингредиента, то интеллектуальное устройство управления 1, определив данный факт, сможет дать команду системе двух-координатных грузовых столов 16 и 17 и изменить состояние продуктовой заготовки 11, т.е. создать необходимые режимы работы оборудования пищевой распределительной системы 5 и транспортировочной системы 3, направленные на устранения недостатков продукции.
В случае технической невозможности исправления продуктовой заготовки 11, интеллектуальное устройство управления 1 передает управляющие сигналы исполнительным элементам 13 изъятия некачественной продукции.
Указанные исполнительные элементы 13 для изъятия некачественной продукции, как правило, расположены в пределах передаточных устройств крайних участков транспортировочной системы 3 и выполнены в виде отдельных установленных модулей, оснащенных поршнем-толкателем с упором, которые изымают некачественную продукцию, передавая ее в утилизационные подсистемы.
В представленном варианте исполнения основное производственное оборудование предлагаемого интеллектуального кулинарного комплекса функционально объединено для наглядного обозрения и закрыто прозрачной защитной витриной.
В целях безопасности предлагаемый интеллектуальный кулинарный комплекс может быть ограничен со всех сторон корпусным ограждением, содержащим проем для обслуживания.
Кулинарный комплекс может быть выполнена в образе стационарного вендинг-автомата, системы, установленной на транспортном средстве или содержащей колеса для перемещения, либо предлагаемая установка может быть установлена в помещениях как стационарный торговый объект.
Предлагаемое изобретение может найти широкое применение в продовольственной сфере обслуживания, как безопасная и технологичная система для питания быстрого приготовления.
Предлагаемое интеллектуальное кухонное оборудование относится к области профессиональных кухонных систем. Интеллектуальный кулинарный комплекс содержит пищевую распределительную систему и взаимодействующую с ней транспортировочную систему. Пищевая распределительная система выполнена в виде набора роботизированных дозировочных модулей, порционно пополняющих съедобными компонентами заданное количество поступивших продуктовых заготовок. Транспортировочная система выполнена по меньшей мере из двух роботизированных функционально скоординированных между собой двухкоординатных грузовых столов, установленных на оборудованном опорном путевом средстве, со стороны концевых участков которого размещены периферийные площадки для временного базирования двухкоординатных грузовых столов. Перемещение столов возможно по заранее согласованному персональному погрузочному пути, контролируемому интеллектуальным устройством управления в соответствии с принятыми и обработанными заранее параметрами заказанного пищевого блюда, имеющего возможность полного или частичного перемещения за счет оборудованных средств передачи с независимо-подвижной рабочей площадки одного двухкоординатного грузового стола на независимо-подвижную рабочую площадку другого двухкоординатного грузового стола. Обеспечивается повышение скорости и качества работы. 13 з.п. ф-лы, 7 ил.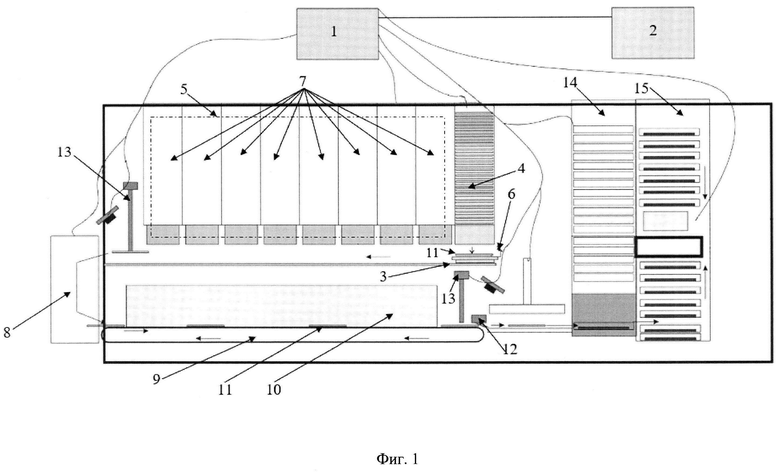
1. Интеллектуальный кулинарный комплекс по неотложному приготовлению индивидуальных пользовательских заказов, содержащий пищевую распределительную систему и взаимодействующую с ней транспортировочную систему, при этом пищевая распределительная система выполнена в виде набора роботизированных дозировочных модулей, порционно пополняющих съедобными компонентами заданное количество поступивших продуктовых заготовок, согласно определенному рабочему циклу, а транспортировочная система выполнена по меньшей мере из двух роботизированных функционально скоординированных между собой двухкоординатных грузовых столов, установленных на оборудованном опорном путевом средстве, со стороны концевых участков которого размещены периферийные площадки для временного базирования в ходе рабочего процесса двухкоординатных грузовых столов, перемещение которых, в том числе совместное, возможно по заранее согласованному персональному погрузочному пути, контролируемому интеллектуальным устройством управления в соответствии с принятыми и обработанными заранее параметрами заказанного пищевого блюда, имеющего возможность полного или частичного перемещения за счет оборудованных средств передачи с независимо-подвижной рабочей площадки одного двухкоординатного грузового стола на независимо-подвижную рабочую площадку другого двухкоординатного грузового стола.
2. Интеллектуальный кулинарный комплекс по п. 1, отличающийся тем, что опорное путевое средство выполнено в виде двух статично установленных направляющих.
3. Интеллектуальный кулинарный комплекс по п. 2, отличающийся тем, что статично установленные направляющие конструкционно адаптированы для взаимодействия с роликовыми механизмами.
4. Интеллектуальный кулинарный комплекс по п. 1, отличающийся тем, что независимо-подвижная рабочая площадка двухкоординатных грузовых столов установлена на основании и имеет нижнюю часть, которая перемещается в продольном направлении, и верхнюю часть, которая перемещается в поперечном направлении.
5. Интеллектуальный кулинарный комплекс по п. 1, отличающийся тем, что двухкоординатные грузовые столы оснащены средствами мониторинга качества продукции.
6. Интеллектуальный кулинарный комплекс по п. 5, отличающийся тем, что цифровое средство мониторинга качества продукции выполнено в виде фото- и/или видеокамеры.
7. Интеллектуальный кулинарный комплекс по п. 5, отличающийся тем, что интеллектуальное устройство управления, анализируя поступающие изображения от средств мониторинга качества продукции, вырабатывает в случае неполного эталонного соответствия продукции запрограммированные командные сигналы, активирующие необходимые режимы работы оборудования, направленные на устранение недостатков продукции.
8. Интеллектуальный кулинарный комплекс по п. 1, отличающийся тем, что продуктовые заготовки изготовлены из теста, являются предпочтительно плоскими и имеют круглую, и/или овальную, и/или прямоугольную, и/или квадратную конфигурацию.
9. Интеллектуальный кулинарный комплекс по п. 1, отличающийся тем, что роботизированные дозировочные модули пищевой распределительной системы установлены последовательно в ряд и содержат сыпучие, пастообразные, твердые, полутвердые и жидкие пищевые добавки и ингредиенты.
10. Интеллектуальный кулинарный комплекс по п. 9, отличающийся тем, что пищевые добавки и ингредиенты содержат мясо, и/или колбасные изделия, и/или ветчину, и/или рыбу, и/или сыр, и/или овощи, и/или фрукты, и/или ягоды, и/или зелень, и/или соус, и/или специи, и/или масло, и/или сироп, и/или крупы, и/или тесто.
11. Интеллектуальный кулинарный комплекс по п. 1, отличающийся тем, что средства передачи оборудованы на независимо-подвижных рабочих площадках двухкоординатных грузовых столов и выполнены в виде автоматических электроприводных систем, горизонтально перемещаемые подаватели которых активируются при условии соприкосновения двухкоординатных грузовых столов друг с другом.
12. Интеллектуальный кулинарный комплекс по п. 4, отличающийся тем, что независимо-подвижная рабочая площадка двухкоординатных грузовых столов установлена с возможностью вращения вокруг оси.
13. Интеллектуальный кулинарный комплекс по п. 1, отличающийся тем, что двухкоординатные грузовые столы содержат контрольные весы.
14. Интеллектуальный кулинарный комплекс по п. 1, отличающийся тем, что периферийные площадки для временного базирования оснащены средствами изъятия некачественных продуктовых заготовок.
| СИСТЕМА И СПОСОБ ПРИГОТОВЛЕНИЯ, КОМПОНОВКИ И УПАКОВЫВАНИЯ ПИЩЕВЫХ ПРОДУКТОВ | 2009 |
|
RU2518543C2 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ПРИГОТОВЛЕНИЯ ПИЩИ СО СТАНДАРТНОЙ ПРОГРАММОЙ ПРИГОТОВЛЕНИЯ | 2015 |
|
RU2659889C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ПРИГОТОВЛЕНИЯ ПИЩИ НА РОБОТИЗИРОВАННОЙ КУХНЕ | 2015 |
|
RU2699690C2 |
| CA 2994128 A1, 07.08.2019 | |||
| DE 602006014435 D1, 01.07.2010 | |||
| US 8145854 B1, 27.03.2012 | |||
| US 20040158494 A1, 12.08.2004 | |||
| WO 2017177041 A2, 12.10.2017 | |||
| CN 111317380 A, 23.06.2020 | |||
| CN 109725559 A, 07.05.2019. | |||

