Изобретение относится к горной промышленности и может быть использовано для автоматического контроля эффективности управления процессом копания экскаватора- драглайна и при обучении машинистов рациональным приемам (методам) управления процессом копания.
Цель изобретения - автоматизация контроля эффективности управления процессом копания эскаватора за счет автоматического распознавания операции копания эскаватора.
На чертеже представлена блок-схема устройства.
Устройство для контроля эффективности управления процессом копания экскаватора содержит блок 1 распознавания операции копания эскаватора, выход которого соединен с входом блока 2 переключения и с входом блока 3 обнуления интеграторов. Датчик 4 скорости тяговых канатов и датчик 5 усилия тяговых канатов через замыкающие контакты 6 и 7 . блока 2 переключения подключены к соответствуюш,им входам блока 8 умножения, выход которого соединен с входом интегратора 9.
Выходы задатчика 10 эталонной скорости тяговых канатов и задатчика 11 эталонного усилия тяговых канатов через замыкающие контакты 12 и 13 блока 2 переключения подключены к соответствующим входам блока 14 умножения, выход которого соединен с входом интегратора 15. Выходы интеграторов 9 и 15 через размыкающие контакты 16 и 17 блока 2 переключения подключены к соответствующим входам блока 18 деления к выходу которого подключен прибор-указатель 19 оценки эффективности управления процессом копания экскаватора. Выход блока 1 распознавания операции копания экскаватора через замыкающий контакт 20 блока 2 переключения подключен также к входу интегратора 21. Выход датчика 4 скорости движения тяговых канатов через замыкающий контакт 6 блока 2 переключения подключен также к входу интегратора 22. Выходы интеграторов 21 и 22 через размыкающие контакты 23 и 24 блока 2 переключения подключены к соответствующим входам блока 25 деления, выход которого соединен с одним из входов блока 26 деления, другой вход которого через размыкающий контакт 27 блока 2 переключения подключен к выходу задатчика 10 эталонной скорости тяговых канатов, а выход блока 26 деления соединен с входом прибора-указателя 28 коэффициента использования скорости привода копающего механизма. Выход блока 3 обнуления интеграторов соединен с обнуляющими входами интеграторов 9, 15, 21 и 22.
Устройство работает следующим образом.
В начале процесса копания в блоке 1 распознавания операции копания экскаватора происходит распознавание операции копания и на выходе этого блока появляется сигнал, который поступает на вход блока 3 обнуления интеграторов. По передне.му фронту этого сигнала блок 3 обнуления интегра- торов формирует импульс, поступающий на обнуляющие входы интеграторов 9, 15, .21 и 22 для их обнуления. Сигнал с выхода блока 1 распознавания операции копания экскаватора включает также блок 2 переклюп чения, который замыкает свои замыкающие контакты 6, 7, 12, 13 и 20 в выходных цепях блока 1, датчиков 4 и 5 и задат- чиков 10 и 11 и размыкает размыкающие контакты 16, 17, 23, 24 и 27 в выходных цепях интеграторов 9, 15, 21 я 22 н задат5 чика 10. На входы блока 8 умножения поступают сигналы, пропорциональные фактическим значениям скорости движения и усилия тяговых канатов во время копания. Сигнал на выходе блока 8 умножения, пропорциональный мгновенному значению мощ0 ности копания, поступает на вход интегратора 9, который выдает значение действительной работы копания. Сигналы с выходов задатчиков 10 и 11, пропорциональные эталонным значениям скорости движе5 ния и усилия тяговых канатов, поступают на входы блока 14 умножения. Сигнал на выходе блока 14 умножения, пропорциональный мгновенному значению эталонной мощности привода тяги экскаватора, поступает на вход интегратора 15, который выдает
0 значение эффективной работы копания. Сигнал с выхода датчика 4 скорости движения тяговых канатов поступает также на вход интегратора 22, на выходе которого формируется сигнал, пропорциональный длине пройденного ковшом пути. Для задания масщта5 ба времени в данном устройстве используется выходной сигнал блока 1, который поступает на вход интегратора 21, на выходе которого формируется сигнал, пропорциональный времени копания в контролируемом цикле.
По окончании процесса копания выходной сигнал блока 1 распознавания операции копания экскаватора выключает блок 2 переключения, отключая выход блока 1 от интегратора 21, выход датчика 4 от блока 8
5 и интегратора 22, выход датчика 5 от блока 8, выходы задатчиков 10 и 11 от блока 14, а выходы интеграторов 9 и 15 подключает к входам блока деления 18, выходы интеграторов 21 и 22 подключает к входам блока 25 деления, а выход задатчика 10 эталонной ско0 рости тяговых канатов подключает к одному из входов блока 26 деления, на другой вход которого поступает сигнал с выхода блока 25 деления, пропорциональный средней скорости тяговых канатов за время копания. На выходе блока 26 деления формируется сиг нал, пропорциональный отношению средней скорости тяговых канатов к эталонной за время копания. Сигнал с выхода блока 26 деления поступает на вход прибора-указателя 28
коэффициента использования скорости привода копающего механизма. На выходе блока 18 деления формируется сигнал, пропорциональный отношению действительной работы копания к эффективной, который поступает на вход прибора-указателя 19 оценки эффективности управления процессом копания экскаватора. Информация о качестве управления процессом копания в произведенном цикле сохраняется на время транспортировки ковша в отвал, его выгрузки и транспортировки обратно в.забой.
В начале следующего цикла копания интеграторы снова обнуляются, что позволяет контролировать эффективность управления процессом копания в автоматическом режиме.
Устройство может быть реализовано на основе операционных усилителей постоянного тока в микросхемном исполнении (например, серии К 153 или К 553) и применено без каких-либо изменений в схеме управления главными электроприводами экскаваторов-драглайнов. Блок 1 распознавания операции копания эскаватора может быть выполнен на базе серийно выпускаемой аппаратуры контроля производительности типа АКП-1. Блок 2 переключения представляет собой электромагнитное реле с пятью замыкающими и пятью размыкающими контактами. Блок 3 обнуления интеграторов содержит дифференцирующую RC-цепь и ждущий мультивибратор (одновибратор), который выдает импульс для транзисторного ключа, включающего разрядное сопротивление в цепи обратной связи интегратора. Датчик 4 скорости тяговых канатов выполнен в виде делителя напряжения, подключенного к якорной цепи двигателя тяговой лебедки, если в схеме электропривода не предусмотрен тахогенератор, а датчик 5 усилия тяговых канатов представляет собой магнитоупругий датчик крутящего момента.
Формула изобретения
Устройство для контроля эффективности управления процессом копания экскаватора, содержащее датчики скорости и усилия тяговых канатов, соединенные через замыкающие контакты блока переключения с входами блока умножения, выход которого подключен
к одному из входов первого интегратора, выход первого и второго интеграторов соединены соответственно через размыкающие контакты с двумя входами блока деления,
5 выход которого подключен к прибору-указателю оценки эффективности управления процессом копания, отличающееся тем, что, с целью автоматизации контроля эффективности управления процессом копания экска„ ватора за счет автоматического распознавания операции копания экскаватора, оно снабжено блоком распознавания операции копания, блоком обнуления интеграторов, задат- чиком эталонной скорости тяговых канатов и эталонного усилия тяговых канатов, двумя
5 дополнительными интеграторами, дополнительным блоком умножения, двумя дополнительными блоками деления и прибором-указателем коэффициента использования скорости привода копающего механизма, причем блок распознавания операции копания
экскаватора соединен с входами блока обнуления интеграторов и блока переключения и через замыкающий контакт блока переключения - с одним входом первого дополнительного интегратора, датчик скорости тяго5 вых канатов соединен через замыкающий контакт с одним входом второго дополнительного интегратора, выходы первого и второго дополнительных интеграторов через размыкающие контакты блока переключения соединены соответственно с первым и вторым
0 входами первого дополнительного блока деления, а его выход соединен с первым входом второго дополнительного блока деления, выход которого подключен к прибору - указателю коэффициента использования скорости привода копающего механизма, выход
5 задатчика эталонной скорости тяговых канатов соединен с вторым входом второго дополнительного блока деления, а также с первым входом дополнительного блока умножения через размыкающий и замыкающий контакты блока переключения соответственно, а с вторым входом дополнительного блока умножения соединен через замыкающий контакт блока переключения задатчик эталонного усилия тяговых канатов, выход дополнительного блока умножения подключен к од5 ному из входов второго интегратора, выход- блока обнуления интеграторов соединен соответственно с другими входами первого, второго и двух дополнительных интеграторов.
0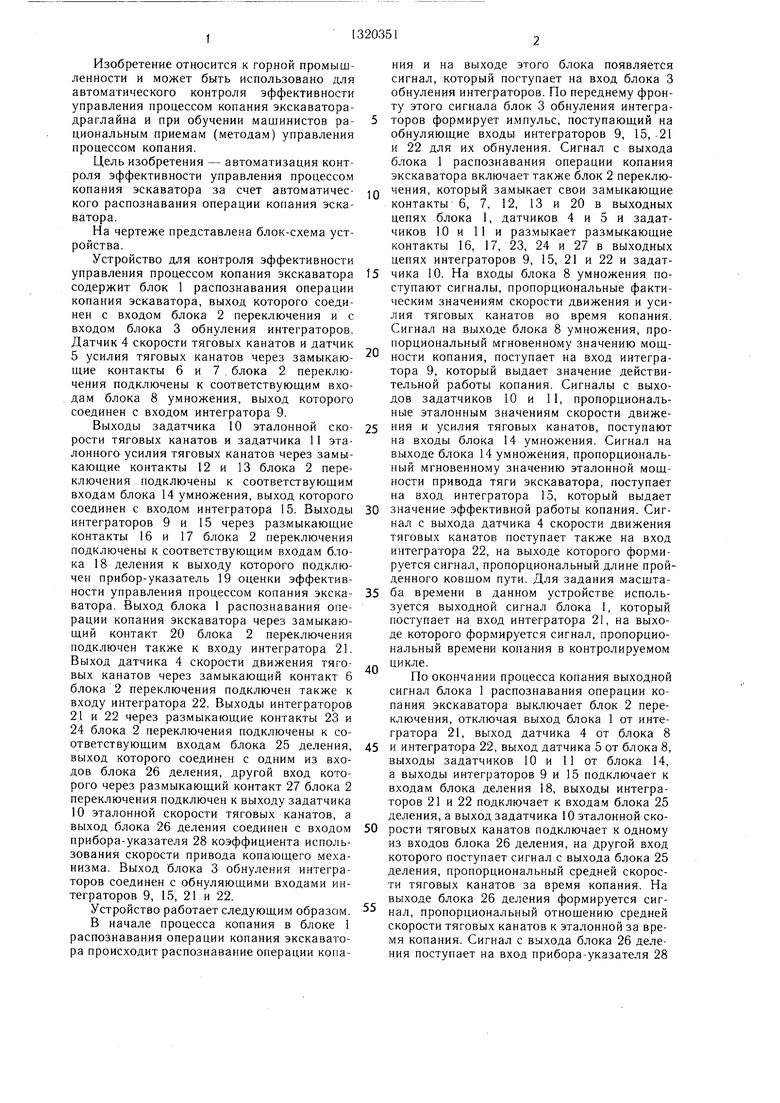
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля работы экскаватора | 1973 |
|
SU540990A1 |
| Устройство автоматического управления процессом копания драглайна | 1982 |
|
SU1063950A1 |
| Устройство для контроля эффективности управления процессом копания экскаватора | 1973 |
|
SU502100A1 |
| Тренажер машиниста одноковшового экскаватора | 1986 |
|
SU1350659A1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2130998C1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| Устройство для управления процессом копания экскаватора-дреглайна | 1984 |
|
SU1182127A2 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
Изобретение относится к горной промышленности и позволяет автоматизировать контроль эффективности управления процессом копания экскаватора за счет автоматического распознавания операции копания экскаватора. Для этого устройство снабжено блоками распознавания операции копания I и обнуления 3 интеграторов 9, 15, 21 и 22,за- датчиками эталонных скорости 10 и усилия 1 1 тяговых канатов (ТК), подключенными чере.з контакты блока 1 переключения к блоку 14 умножения (БУ), двумя блоками деления 18 и 26 и прибором-указателем 28 коэффициента использования скорости привода копаю- niero механизма. Датчики 4 и 5 скорости и усилия ТК через замыкающие контакты 6 п 7 блока 2 переключения подключены к входам другого БУ 8. На выходах БУ 8 и 14 формируются соответственно сигналы, пропорциональные мгновенным значениям мощности копания и эталонной мощности привода тяги. Эти сигналы, а также сигналы с интеграторов 21 и 22, пропорциональные времени копания и длине пройденного ковщом пути, по окончании процесса копания после выключения блока 2 поступают на блоки 18, 26 и 25. Выходной сигнал блока 26 пропорционален отношению средней скорости ТК к эталонной. Выходной си1 нал блока 18 пропорционален отношению действительной работы копания к эффективной и поступает на вход прибора-указателя 19 оценки эффективности управления процессом копания экскаватора. 1 ил. СО ГчЭ О ОО ел
| Устройство для контроля работы экскаватора | 1979 |
|
SU920128A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для контроля эффективности управления процессом копания экскаватора | 1973 |
|
SU502100A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
