Способ использования гироскопического момента для управления летательным аппаратом (транспортным средством), т.е. изменения его ориентации в пространстве и/или его стабилизации, заключающийся в использовании гироскопа или нескольких, отличающийся отсутствием необходимости проводить «разгрузку» гироскопа («разгрузку» гиродина), возможностью применения гироскопов небольшой массы, быстрой смены направления поворота, а также экономией энергии и топлива.
Гироскопический момент уже имеет свое применение в устройствах ориентации и стабилизации космических аппаратов (гиродинах), но гиродины имеют большую массу и их нельзя разгонять быстрее нескольких сотен или максимум тысяч оборотов в минуту. Если внешние возмущения постоянно закручивают аппарат в одну и ту же сторону, то со временем маховик выходит на предельные обороты и его приходится «разгружать», включая двигатели ориентации.
Предлагаемый способ предназначен для применения на летательных аппаратах (транспортных средствах), преимущественно на космических аппаратах и дает возможность заменить реактивные двигатели ориентации и тяжелые гиродины электромеханическими устройствами, которые не будут требовать «разгрузки», обладающие высокой эффективностью и имеющие более высокий КПД.
Раскрытие изобретения
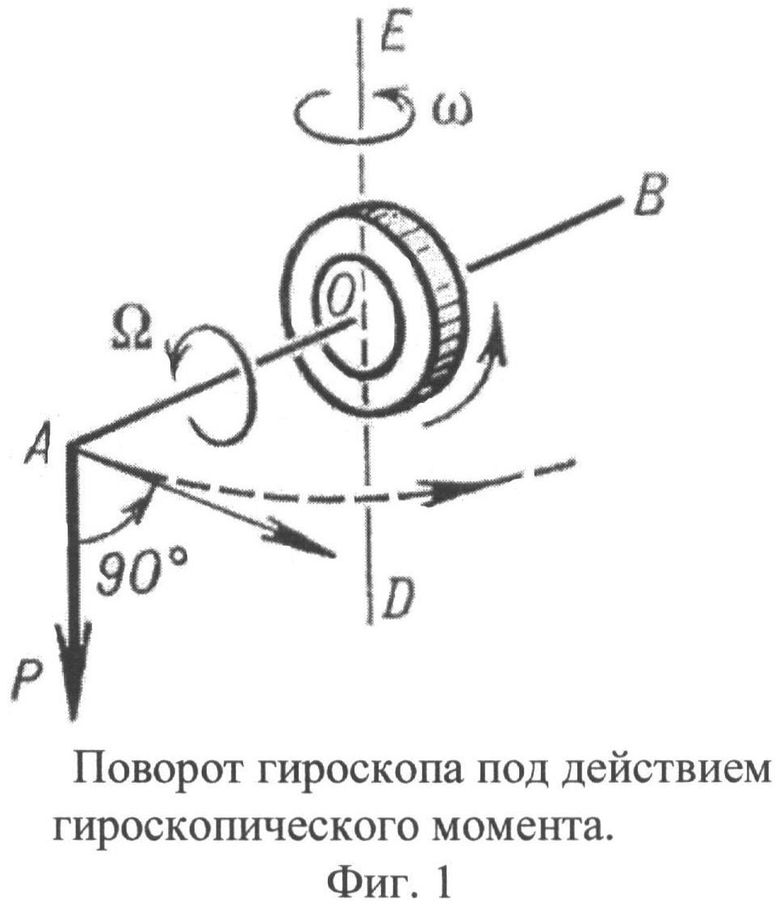
Гироскопический момент возникает, когда на ось гироскопа начинает действовать сила P, стремящаяся привести ее в движение, т.е. создающая вращающий момент относительно центра подвеса (фиг.1). Под действием этого вращающего момента возникают силы Кориолиса, поэтому конец A, оси AB гироскопа, будет отклоняться не в сторону действия силы P, как это было бы при невращающемся роторе, а в направлении, перпендикулярном к этой силе и в результате гироскоп начнет вращаться вокруг оси DE, притом не ускоренно, а с постоянной угловой скоростью.
Способ использования гироскопического момента для управления летательным аппаратом (транспортным средствам) показан на схеме сил и моментов (фиг.2). При действии на гироскоп момента Myzl в его правой и левой полуплоскостях возникают силы Кориолиса Fal и Fbl . Т.к. эти силы имеют равное значение и противоположное направление, то их действие создает момент Mxzl .
Для нейтрализации возникающего момента инерции при раскручивании гироскопа и его торможении, а также обратного действия при работе устройства создающего момент Myzl , в схеме (фиг.2) предусмотрен второй гироскоп, имеющий идентичные размеры и массу. Вектор вращения второго гироскопа (ω2) противоположен вектору вращения первого гироскопа (ω1). Векторы моментов Myz1 и Myz2 также имеют взаимопротивоположные направления и нейтрализуют обратные действия друг друга.
Соответственно действие момента Myz2 на другой гироскоп инициирует возникновение сил Кориолиса Fa2 и Fb2 , которые создают момент Mxz2 . Сумма моментов Mxz1 и Mxz2 дает момент Mxz, который вращает центральную ось устройства.
Таким образом, если центральную ось устройства (фиг.2) жестко соединить с каким-либо летательным аппаратом (транспортным средством), то под действием момента Mxz , он будет поворачиваться в направлении этого момента.
Осуществление изобретения
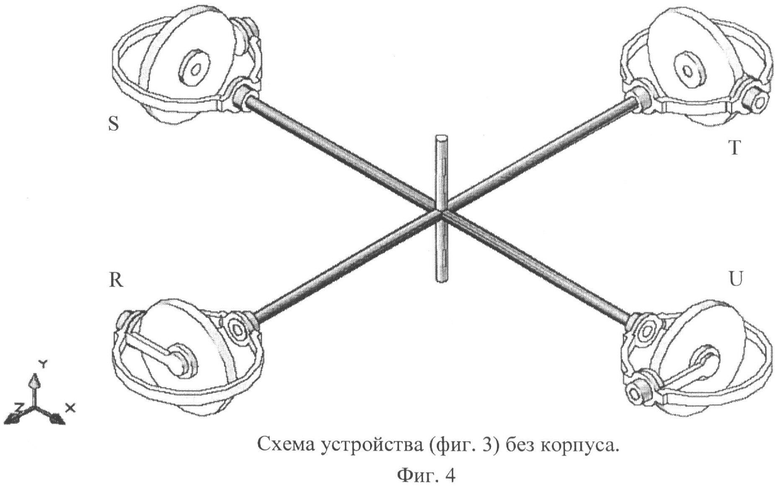
На схеме (фиг.3 и фиг.4) изображено устройство, которое позволяет технически осуществить способ использования гироскопического момента для управления летательным аппаратом (транспортным средством).
Устройство состоит из корпуса (1), в котором либо жестко, либо через подшипник (4) и систему дополнительного момента вращения (2) закреплена центральная ось (3). Система дополнительного момента вращения устанавливается для того, чтобы иметь возможность изменять угловую скорость поворота корпуса устройства и соединенного с ним летательного аппарата (транспортного средства). Центральная ось соединена со штангами (5), к каждой штанге присоединена система крепления гироскопа, состоящая из рамы (8) с системой ее крепления и поворота (10), гироскопа (7) и держателя его оси (9) с системой изменения угла ее наклона (6).
В процессе работы, устройство может быть подвержено разного рода неблагоприятным воздействиям (изменение величины нагрузки, трение частей механизма, толчки, удары и т.д.). В результате чего будет происходить изменение угла наклона гироскопа и появление вертикальной составляющей сил Кориолиса стремящейся повернуть его раму вокруг штанги. Для того чтобы «нейтрализовать» действие вертикального момента этих сил в схеме устройства предусмотрена система крепления и поворота рамы, которая осуществляет поворот рамы на 180°, при этом, система изменения угла наклона оси гироскопа поворачивает гироскоп на 180° соответственно.
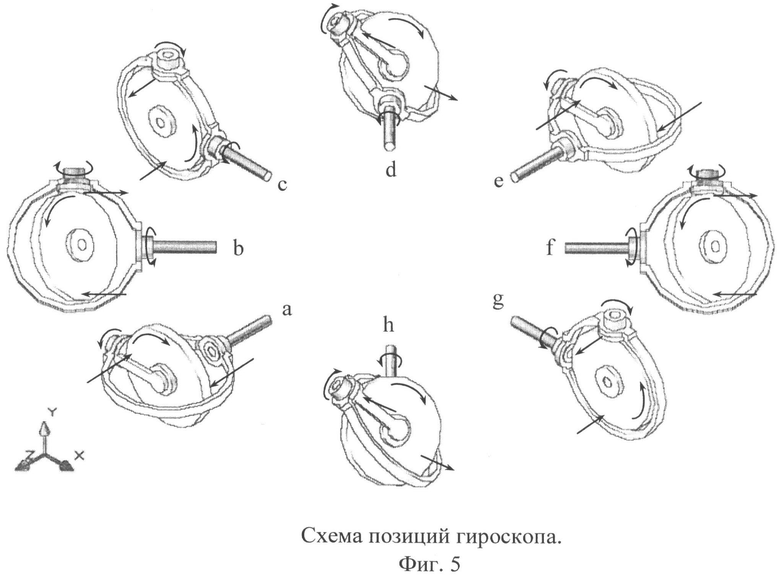
На схеме позиций гироскопа (фиг.5) показана смена его положений в процессе работы (восемь позиций). Все гироскопы устройства (фиг.3 и фиг.4) синхронно проходят каждую позицию. Но поскольку, находясь в позициях (с) и (g) гироскопы не вращают центральную ось, т.к. силы Кориолиса расположены в вертикальной плоскости, то, для равномерности вращения центральной оси, необходимо, чтобы при работе устройства гироскопы систем крепления (R) и (Т), находились в позиции (а) или (е), тогда как гироскопы систем крепления (S) и (U) находятся в позиции (с) или (g).
Позиции а, b, с, d - первый полуцикл, после которого гироскоп снова встает в вертикальное положение (позиция е), позиции е, f, g, h - второй полуцикл, гироскоп возвращается изначальное вертикальное положение (позиция а) (фиг.5). Стрелками показаны силы и моменты, действующие на гироскоп при изменении угла его наклона.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| Способ динамичной высокоточной ориентации и стабилизации космического аппарата | 2018 |
|
RU2702932C1 |
| СИЛОВАЯ УСТАНОВКА ЛЕТАТЕЛЬНОГО АППАРАТА НА ДВУХПОДВИЖНОМ ПОДВЕСЕ | 2018 |
|
RU2700103C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ГИРОСКОПИЧЕСКОЙ СТАБИЛИЗАЦИЕЙ | 2020 |
|
RU2796279C2 |
| КОМБИНИРОВАННАЯ ГРАВИТАЦИОННАЯ СИСТЕМА ОРИЕНТАЦИИ МАЛОГО КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2658070C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОЙ ПОСАДОЧНОЙ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2494932C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ФЮЗЕЛЯЖЕМ, ВЫПОЛНЕННЫМ ПО СУЩЕСТВУ В ВИДЕ АЭРОСТАТИЧЕСКОГО ПОДЪЕМНОГО ТЕЛА, ДВИГАТЕЛЬНАЯ УСТАНОВКА И СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1998 |
|
RU2196703C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2686453C1 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
Изобретение относится к устройствам стабилизации и ориентации и может быть использовано при конструировании гироскопов. Устройство управления летательным аппаратом (транспортным средством) содержит корпус, центральную ось со штангами, гироскопы с системами крепления к штангам. Система крепления содержит раму, систему крепления, наклона и поворота рамы, держатель гироскопа. Корпус и центральная ось закреплены через систему дополнительного момента. Изобретение позволяет уменьшить массу гироскопа и исключить необходимость проведения «разгрузки» гироскопа. 2 н.п. ф-лы, 5 ил.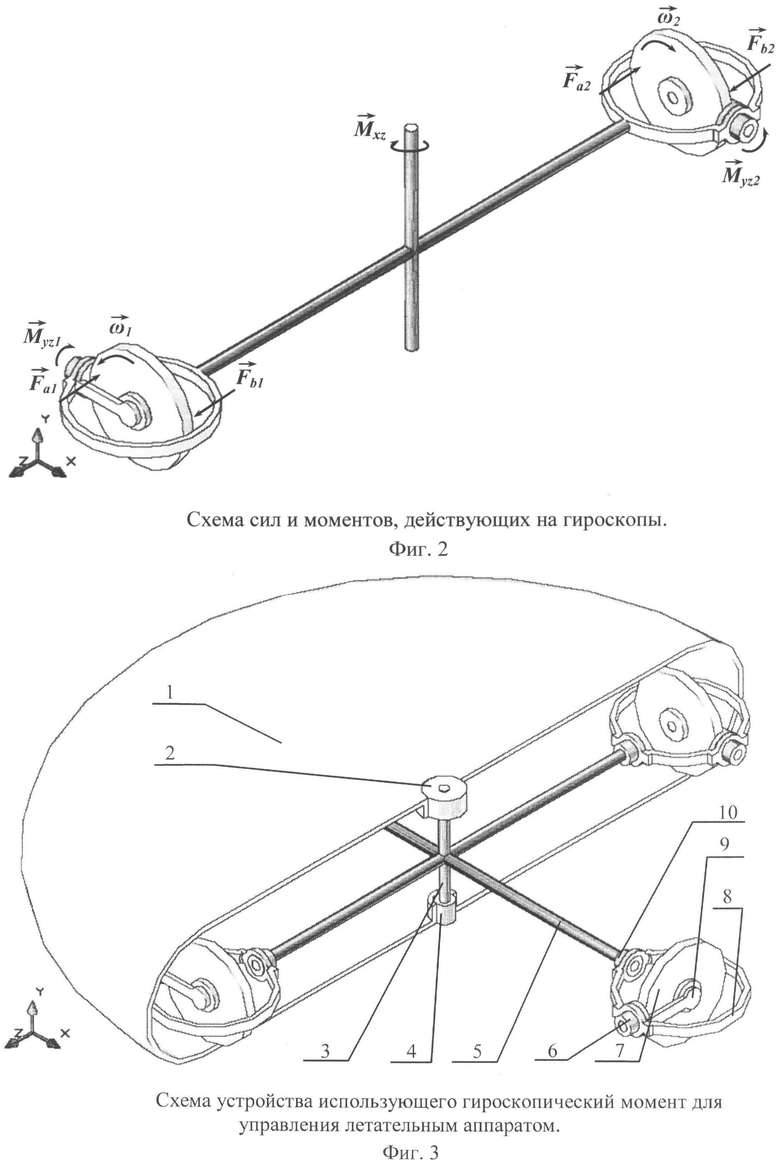
1. Способ управления летательным аппаратом (транспортным средством), т.е. изменения его ориентации в пространстве и/или его стабилизации, заключающийся в использовании гироскопического момента, создаваемого гироскопом или несколькими, отличающийся отсутствием необходимости проведения «разгрузки» гироскопов, а также применением гироскопов, имеющих небольшую массу относительно самого летательного аппарата (транспортного средства) в сравнении с другими системами ориентации и стабилизации, использующих гироскопический момент.
2. Устройство управления летательным аппаратом (транспортным средством), работа которого осуществляется с применением способа по п.1, состоящее из корпуса, в котором через систему дополнительного момента вращения закреплена центральная ось со штангами, к каждой штанге присоединена система крепления каждого гироскопа, состоящая из рамы с системой ее крепления и поворота, гироскопа и держателя его оси с системой изменения угла ее наклона.
| Попов В.И | |||
| Системы ориентации и стабилизации космических аппаратов | |||
| Пассивные и комбинированные системы | |||
| - М.: Машиностроение, 1977, с.6-7 | |||
| Арепьев А.Н | |||
| Проектирование легких пассажирских самолетов | |||
| - М.: Издательство МАИ, 2006, с.498-500 | |||
| СИЛОВОЙ ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1985 |
|
SU1839930A1 |
| Способ изготовления спиральных сверл и других цилиндрических изделий со спиральными или прямыми канавками накатыванием плоскими плашками | 1950 |
|
SU91160A1 |
| US 2010050854, 30.09.2010 | |||
| US 6729580 B2, 04.05.2004. | |||

