Предлагаемое изобретение относится к исполнительным органам (ИО) систем ориентации (СО) космических аппаратов (КА), а точнее к электромеханическим исполнительным органам (ЭМИО), основу которых составляют управляемые или стабилизированные по скорости двигатели-маховики.
Известны используемые в системах ориентации ЭМИО, содержащие двигатели-маховики, установленные в карданов подвес [1-3].
К недостаткам их можно отнести наличие большого количества перекрестных моментов, создаваемых обеими двигателями-маховиками при наличии рассогласования между осями, связанными с КА, и осями карданова подвеса, значительная величина погрешности положения векторов кинетических моментов двигателей-маховиков, определяемая суммой прогрешностей деталей, составляющих кинематическую цепь "основание - ось двигателя" [5], а также довольно низкие массо-габаритные характеристики.
Целью предлагаемого изобретения является устранение перекрестных моментов, создаваемых регулируемым двигателем-маховиком, уменьшение вышеуказанной погрешности положения векторов кинетических моментов и улучшение массо-габаритных характеристик.
Указанная цель достигается перенесением из карданова подвеса на корпус КА регулируемого двигателя-маховика и всех датчиков углов и моментных устройств.
На чертеже изображена конструкторско-кинематическая схема предлагаемого исполнительного органа.
ЭМИО состоит из двигателя-маховика 1, выполняющего функцию силового гироскопа и генерирующего постоянный кинетический момент Н1, двигателя-маховика 2, генерирующего переменный кинетический момент Н2, моментных устройств 3 и 4 и датчиков углов 5 и 6.
Отличительной особенностью данной конструкторско-кинематической схемы является жесткая фиксация всех узлов и элементов на корпусе КА за исключением двигателя-маховика 1, установленного в карданов подвес.
Это достигается тем, что двигатель-маховик 2 крепится непосредственно к корпусу прибора, а датчик угла и моментное устройство внутренней оси также установлены на корпусе и кинематически соединяются с внутренней осью бугелем, состоящим из внутреннего 7 и наружнего 8 полуколец.
Вследствие этого достигается уменьшение перекрестных связей за счет жесткой привязки векторов угловых скоростей и моментов к осям, связанным с управляемым объектом.
Повышение точности положения векторов H1 и Н2 достигается уменьшением количества деталей в кинематической цепи "ось вращения - основание прибора" в сравнении с прототипом.
Предлагаемая конструкторско-кинематическая схема, обеспечивая коллинеарность осей координат вышеуказанных систем отсчета углового положения векторов моментов и угловых скоростей и сокращение звеньев кинематической цепи "ось маховика - основание", позволяет к тому же сделать ИО более компактным и легким.
В подтверждение преимущества по массо-габаритным характеристикам предлагаемого ЭМИО в сравнении с протитипом приводим результаты расчетно-конструкторской проработки габаритов и массы ЭМИО с кинетическом моментом
H1+H2=300±40 Нмс
по кинематической схеме прототипа и предлагаемого ЭМИО.
Источники информации
1. "Вопросы ракетной техники", №7, 1972 г.
2. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - М.: Наука, 1974.
3. Каргу Л.И. Системы угловой стабилизации космических аппаратов. - М.: Машиностроение, 1973.
4. Копытов В.И., Гладышев Г.Н., Дмитриев В.С. Техническая реализация требований по точности положения вектора кинетического момента в электродвигателях с большим кинетическим моментом. В сб.: Влияние вибраций, линейных ускорений и вращения на поведение гироскопических устройств. - Томск, 1981, с. 60-62.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН КОСМИЧЕСКОГО АППАРАТА | 1979 |
|
SU1839918A1 |
| Способ разгрузки инерциальных исполнительных органов космического аппарата и устройство для реализации способа | 2024 |
|
RU2834705C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| АНТЕННОЕ УСТРОЙСТВО С ЛИНЕЙНОЙ ПОЛЯРИЗАЦИЕЙ | 2005 |
|
RU2282287C1 |
| СИЛОВОЙ ДВУХСТЕПЕННЫЙ УПРАВЛЯЮЩИЙ ГИРОСКОП | 1984 |
|
SU1839931A1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ НАПРАВЛЕНИЯ ЗЕРКАЛА АНТЕННОГО УСТРОЙСТВА НА ОБЪЕКТ ВИЗИРОВАНИЯ С ОДНОВРЕМЕННЫМ ФОРМИРОВАНИЕМ СИГНАЛОВ ТОРМОЖЕНИЯ ВРАЩЕНИЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ ПРИ КРУГОВОМ ВРАЩЕНИИ ОСНОВАНИЯ АНТЕННОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО ЖЕСТКО ВНУТРИ КОРПУСА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2336611C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН | 1982 |
|
SU1839925A1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1984 |
|
SU1839933A1 |
| ГИРОСТАБИЛИЗАТОР | 1978 |
|
SU1840380A1 |
Изобретение относится к исполнительным органам систем ориентации, а точнее к электромеханическим исполнительным органам, основу которых составляют управляемые или стабилизированные по скорости двигатели-маховики. Сущность: устройство содержит ротор в кардановом узле, датчики угла и датчики момента. При этом по оси наружной рамы установлены один из датчиков угла и один из датчиков момента. Кроме того, в него введены внутренний и внешний шарниры, связанные через подшипник, ось которого совпадает с осью ротора. При этом ось поворота внутреннего шарнира установлена на внутренней рамке по оси наружной рамки. Другие датчики угла и момента установлены на оси наружного шарнира, которая расположена на корпусе по оси, перпендикулярной оси ротора и оси наружной рамки. Технический результат: расширение диапазона нагрузок при контроле распределенных преобразователей механических колебаний. 1 ил.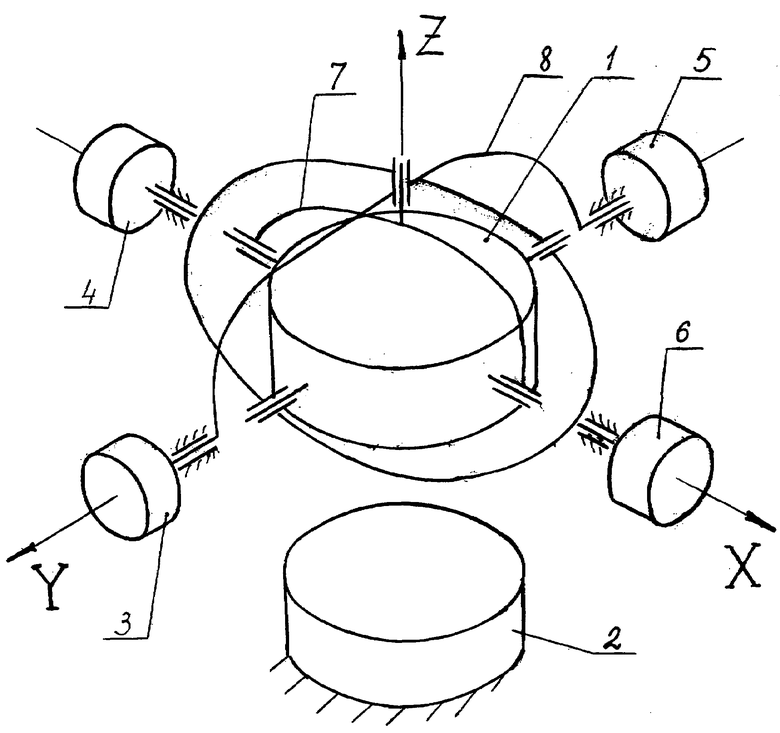
Силовой трехстепенный гироскоп с ротором в кардановом подвесе, датчиками угла и датчиками момента, при этом по оси наружной рамы установлены один из датчиков угла и один из датчиков момента, отличающийся тем, что, с целью уменьшения перекрестных связей по моментам управления и уменьшения массы, в него введены внутренний и внешний шарниры, связанные через подшипник, ось которого совпадает с осью ротора, причем ось поворота внутреннего шарнира установлена на внутренней рамке по оси наружной рамки, а другие датчики угла и момента установлены на оси наружного шарнира, которая расположена на корпусе по оси, перпендикулярной оси ротора и оси наружной рамки.
| Джекот, Лиска | |||
| Применение гиростабилизаторов в системах управления угловым положением космических аппаратов | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Труды VII Международного симпозиума ИФАК по автоматическому управлению в пространстве | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ориентация и стабилизация спутников | |||
| М.: Наука, 1976 г., с.64-65. | |||

