Изобретение относится к области воздухоплавания, а именно к беспилотным летательным аппаратам, и предназначено для видеонаблюдения в разведывательных целях, поисковых и горно-спасательных работах, за магистральными трубопроводами, линиями электропередач, мероприятиями с большими скоплениями людей: митингами, демонстрациями, спортивными состязаниями, стихийными бедствиями, чрезвычайными ситуациями и пр.
Известен летающий аппарат, включающий каркасный корпус, наполненный гелием, двигатели, баки с топливом (Патент РФ № 2009072, В64В 1/00, В64С 33/02, 15.03.1994).
Недостатком аналога является громоздкость конструкции и значительные затраты эксплуатации за счет большой энергоемкости топливных баков и короткий ресурс автономной работы.
Известен летающий аппарат типа дирижабль, содержащий средство, включающее газосодержащую оболочку и используемое как корпус с продольной осью, и средство панели солнечных батарей, выполненное при использовании с возможностью его установки снаружи корпуса и проходящее только по части окружности корпуса, при этом средство панели солнечных батарей жестко прикреплено к корпусу дирижабля и проходит по достаточной длине корпуса для обеспечения необходимой площади панели для основных энергетических потребностей дирижабля. (Патент РФ № 2236366, В64В 1/00, В64В 1/38, B64D 47/00, 20.09.2004).
Недостатком аналога являются ограниченные функциональные возможности.
Известна также система поиска и видеонаблюдения объекта, содержащая на беспилотном управляемом летательном аппарате средство отображения, средство управления, включающее управляющий процессор и распределитель сигнала, соединенное со средством отображения, приемник глобальной навигационной системы и приемопередатчик, соединенные со средством управления, при этом средство управления соединено также с рулями беспилотного управляемого летательного аппарата, с блоками памяти и обработки видеоинформации, с блоками памяти и обработки управляющих команд, на командном пункте - приемник глобальной навигационной системы и приемопередатчик, соединенные с блоком предварительной обработки, который через общую шину соединен с блоками памяти видеоинформации, блоками обработки видеоинформации, процессором связи и дисплейным процессором, к которому подключен, по крайней мере, один дисплей и блок телеуправления с пультом управления, при этом на командном пункте введены подключенные к общей шине блок памяти координат беспилотного управляемого летательного аппарата, блок памяти опорной видеоинформации, блок памяти характеристик полета, процессор управления, на беспилотном управляемом летательном аппарате, который выполнен в виде беспилотного программно управляемого летательного аппарата, введены подключенные к средству управления блок памяти характеристик полета, ультразвуковой датчик высоты, датчик воздушной скорости, датчик барометрической высоты и гироскопы диапазонов тангажа, разворота и скольжения, при этом оптическая ось средства отображения расположена по нормали к плоскости полета беспилотного программно управляемого летательного аппарата (заявка РФ № 2002114606, G05D 1/12, H04N 7/18, 27.05.2004).
Недостатком аналога является сложность конструкции, небольшая длительность и дальность полета.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является сверхлегкий беспилотный летательный аппарат, реализующий способ разведки и контроля чрезвычайной ситуации с помощью применения сверхлегкого беспилотного летательного аппарата и малогабаритного комплекса типа "Космос M1", с использованием технологий мониторинга чрезвычайных ситуаций при обработке изображений высокого разрешения, получаемых видеоаппаратурой, установленной на сверхлегком беспилотном летательном аппарате, оснащенном системой определения координат GPS и системой программного автоматического управления, корректируемой разовыми командами по каналу двусторонней связи (заявка РФ № 2003129544, G01C 11/00, 27.03.2005).
Недостатком прототипа является сложность реализации запуска, значительные затраты на эксплуатацию оборудования.
Задачей изобретения является упрощение конструкции, расширение функциональных возможностей за счет широкого диапазона высот и возможности зависания над объектом.
Поставленная задача достигается тем, что в беспилотном летательном аппарате для видеонаблюдения, содержащем корпус, в котором расположены система глобального позиционирования и система программного автоматического управления, корректируемая разовыми командами по каналу двусторонней связи, и на котором расположены двигатель, соединенный с воздушным винтом, видеоаппаратура, в отличие от прототипа, корпус внутри содержит баллон, наполненный газом легче воздуха, и состоит из двух плоскостей верхней и нижней, соединенных бандажом, причем на верхней плоскости расположены панель солнечной батареи и первый киль, а на нижней плоскости расположены панель солнечной батареи, второй киль, технологические окна, купольная видеокамера, руль направления со штангой механизма поворота, которая проходит сквозь верхнюю и нижнюю плоскости и связана с рулем направления тросами, причем первый киль и второй киль связаны шарнирным соединением с рулем направления, имеется механизм поворота двигателей и механизм поворота руля высоты, на штанге механизма поворота руля направления перпендикулярно расположена первая и третья перекладины, соединенные тросами со второй и четвертой перекладиной.
Механизм поворота руля направления содержит электродвигатель, соединенный с редуктором и шестеренчатой передачей со штангой механизма поворота руля направления, на которой находятся первая и третья перекладины.
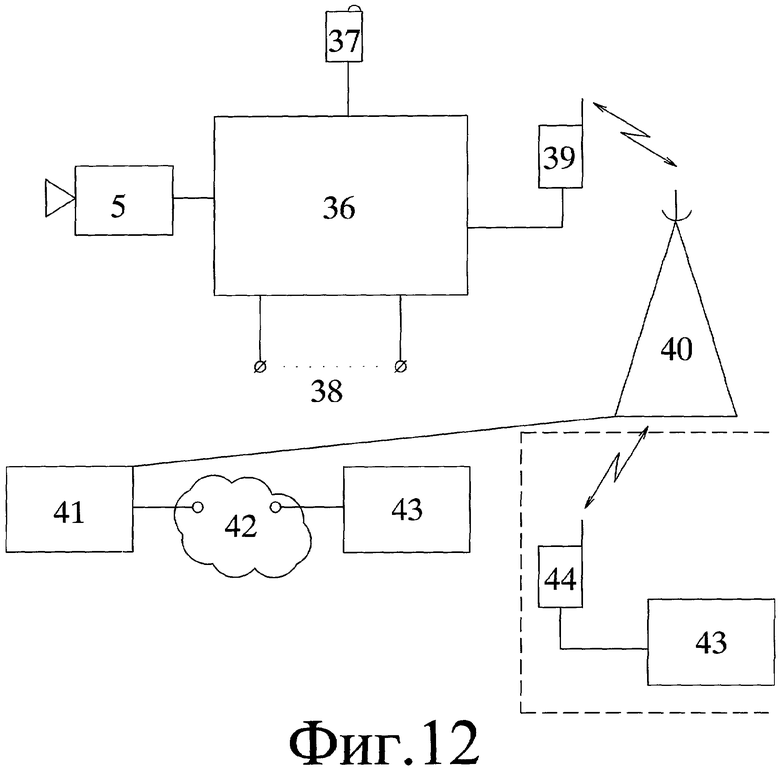
Поставленная задача достигается также способом управления и передачи данных беспилотным летательным аппаратом для видеонаблюдения, по которому передачу данных аппарату осуществляют по каналу сотовой связи посредством первого компьютера через второй терминал, с которого сигнал подают на приемопередающую станцию, распределяют коммутатором и через приемопередающую станцию подают на первый терминал и далее на трал и исполнительные цепи аппарата, которые управляют механизмами поворота руля направления, двигателей и руля высоты, механизмом управления видеокамерой, включением, выключением и регулированием числа оборотов двигателей, при этом посредством системы глобального позиционирования определяют координаты места нахождения аппарата, для чего сигнал с купольной видеокамеры через трал, первый терминал подают на приемопередающую станцию, распределяют коммутатором и посредством Интернета выводят на второй компьютер или через приемопередающую станцию сигнал подают на второй терминал и выводят на первый компьютер.
Купольная видеокамера позволяет наблюдать в вертикальной плоскости на 90°, горизонтальной плоскости на 360°. Возможна установка двух видеокамер для достижения объемного изображения для рассмотрения объекта в трех измерениях (длина, ширина, высота), что немаловажно при поисковых работах, когда необходима целостная картина восприятия.
Сущность изобретения поясняется чертежами.
На фиг.1 показан вид сбоку устройства. На фиг.2 изображен вид спереди. На фиг.3 изображен вид снизу. На фиг.4 - вид сверху. На фиг.5 изображен механизм поворота руля направления, вид сбоку. На фиг.6 изображен механизм руля направления, вид сверху. На фиг.7 - механизм поворота руля направления, вид спереди. На фиг.8 - изображен баллон 14, вид сверху. На фиг.9 - механизм поворота руля высоты и движительной установки, вид сбоку. На фиг.10 - механизм поворота руля высоты и движительной установки, вид сверху. На фиг.11 - механизм поворота руля высоты и движительной установки, вид спереди. На фиг.12 изображена блок-схема управления и передачи данных видеонаблюдения по каналам сотовой связи.
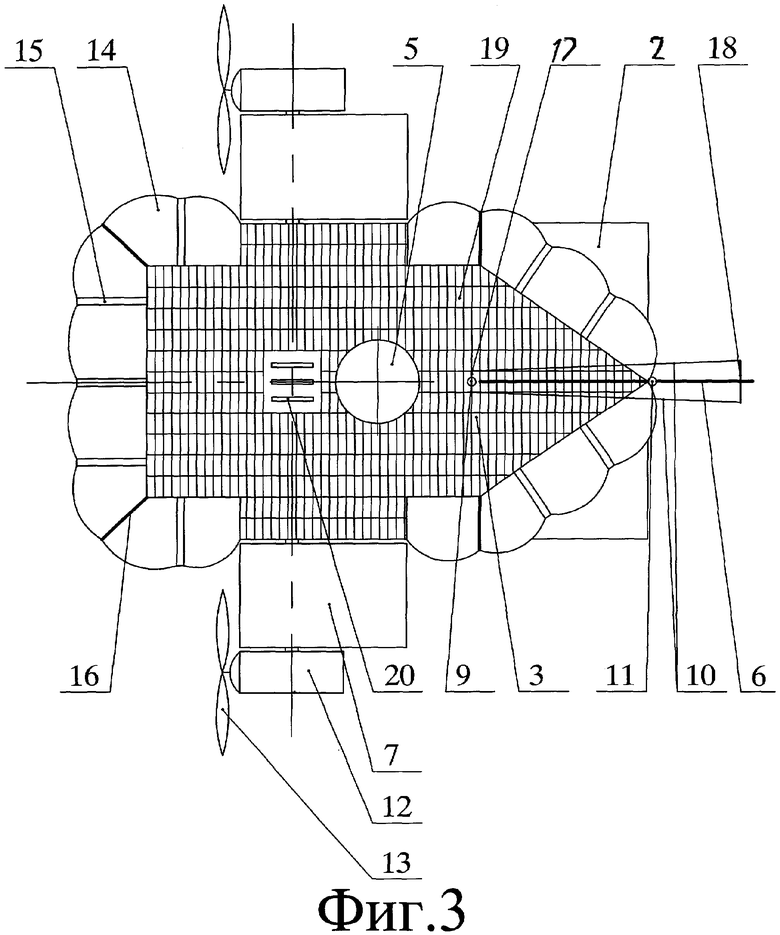
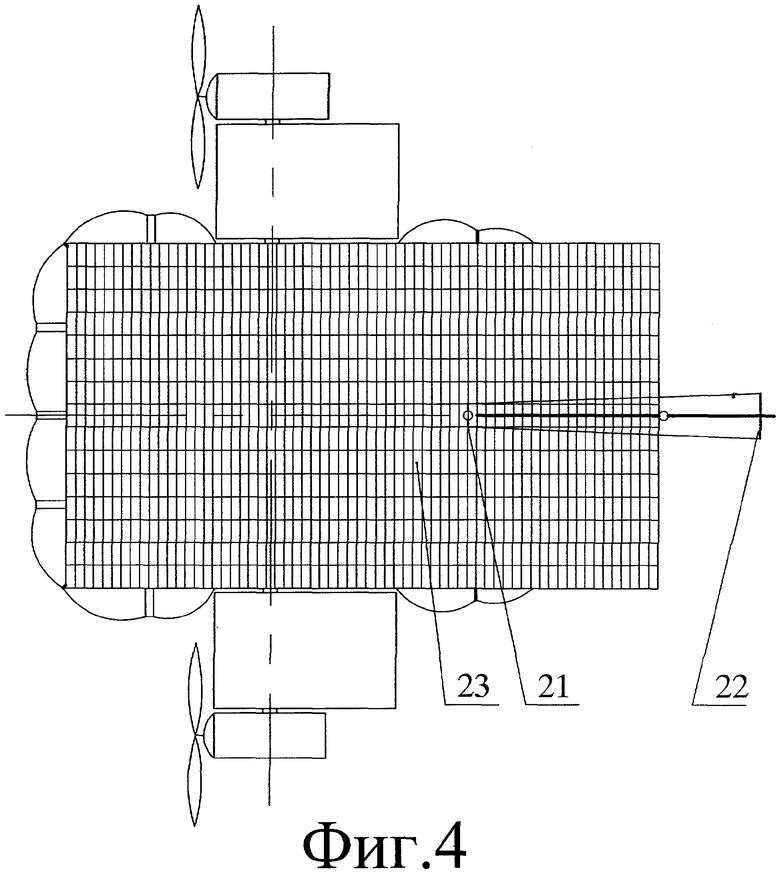
Беспилотный летательный аппарат (фиг.1) содержит корпус 1, состоящий из двух плоскостей верхней 2 и нижней 3. На верхней плоскости 2 (Фиг.4) расположен первый киль 4. На нижней плоскости 3 расположены купольная видеокамера 5, руль направления 6, руль высоты 7, второй киль 8, штанга 9 механизма поворота руля направления, которая проходит сквозь верхнюю 2 и нижнюю 3 плоскости. Штанга 9 механизма поворота руля направления соединена тросами 10 с рулем направления 6. Первый киль 4 и второй киль 8 связаны шарнирным соединением 11 с рулем направления 6. Двигатель 12 соединен с воздушным винтом 13. Внутри корпуса 1 содержится баллон 14. Бандаж 15 соединен с верхней 2 и нижней 3 плоскостями для предотвращения взаимных перемещений. Баллон 14 содержит швы 16 (фиг.3). На штанге 9 механизма поворота руля направления перпендикулярно расположена первая перекладина 17, соединенная тросами 10 со второй перекладиной 18. На нижней плоскости 3 расположены панель солнечной батареи 19 и технологические окна 20 механизмов поворота руля высоты и движительной установки (на фиг.3 не показана). Верхняя плоскость 2 (фиг.4) содержит третью перекладину 21. Четвертая перекладина 22 расположена на руле направления 6. Панель солнечной батареи 23, а также первый киль 4 расположены на верхней плоскости 2.
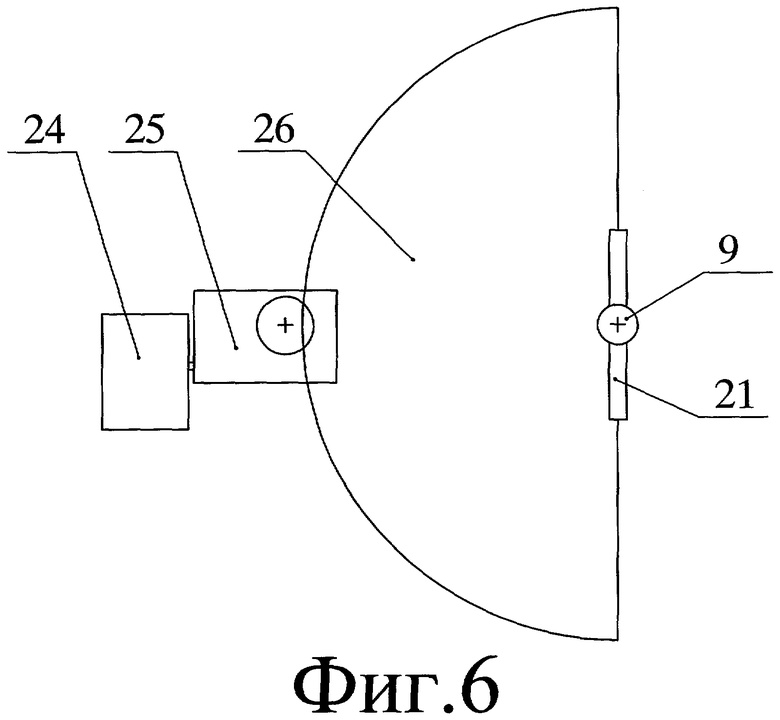
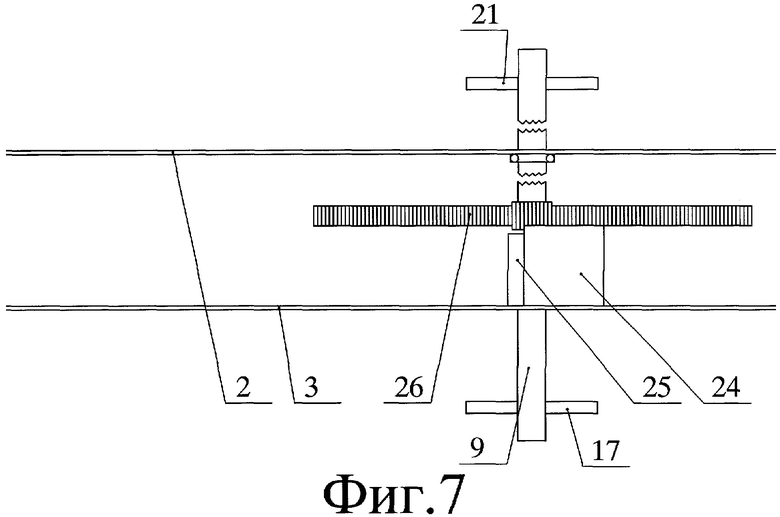
Механизм поворота руля направления (фиг.5, 6, 7) содержит электродвигатель 24, соединенный с редуктором 25 и шестеренчатой передачей 26 со штангой 9 механизма поворота руля направления, на которой находится первая 17 и третья 21 перекладины.
Механизм поворота двигателей 12 (фиг.9, 10, 11) также состоит из электродвигателя 27, соединенного с редуктором 28 и шестеренчатой передачей 29 со штангой 30, на которой находится технологическое отверстие 31 для подачи питания двигателям 12.
Механизм поворота руля высоты 7 аналогично содержит электродвигатель 32, соединенный с редуктором 33 и шестеренчатой передачей 34 со штангой 35 (фиг.9, 10, 11).
В корпусе 1 на верхней плоскости 2 установлены система управления и передачи данных видеонаблюдения по каналу сотовой связи, которая содержит видеокамеру 5, соединенную с тралом 36, который связан с GPS 37, исполнительными цепями 38, первым терминалом 39, например CDMA-450. Первый терминал 39 связан с приемопередающей станцией 40, которая подключена к коммутатору 41 с выводом через Интернет 42 на компьютер 43. И (или) возможно управление и прием данных видеонаблюдения через второй терминал 44 к компьютеру 43.
Устройство работает следующим образом.
Баллон 14, наполненный газом легче воздуха, например гелием, обеспечивает малый взлетный вес, что значительно уменьшает энергопотребление при наборе высоты и маневрах.
Диапазон высот меняется за счет поворота рулей высоты 7 и поворотом оси двигателей 12. В качестве двигателей могут быть использованы двигатели внутреннего сгорания или электродвигатели.
Электродвигатель 24 через редуктор 25, шестеренчатую передачу 26, штангу 9, первую 17 и третью 21 перекладины, соединенные тросами 10 со второй 18 и четвертой 22 перекладинами, находящимися на руле направления 6, поворачивает руль направления 6 в горизонтальной плоскости в пределах 170°, т.е. относительно продольной оси по 85° вправо и влево.
Электродвигатель 27 через редуктор 28, шестеренчатую передачу 29, штангу 30 поворачивает в вертикальной плоскости в пределах 170° (т.е. относительно горизонтальной оси 40° вниз и вверх на 130°) движительную установку, состоящую из двигателя 12 и воздушного винта 13.
Электродвигатель 32 через редуктор 33, шестеренчатую передачу 34, штангу 35 поворачивает в вертикальной плоскости в пределах 170° (т.е. относительно горизонтальной оси 40° вниз и вверх на 130°) руль высоты 7.
Пример конкретной реализации способа.
Управление и передачу данных видеонаблюдения осуществляют по каналу сотовой связи, например, стандарта IMT-МС 450. Оператор посредством компьютера 43 осуществляет управление и видеонаблюдение беспилотным летательным аппаратом через терминал 44. Сигнал с терминала 44 подают на приемопередающую станцию 40, распределяют коммутатором 41 и через приемопередающую станцию 40 подают на терминал 39, и далее на трал 36 и исполнительные цепи 38, которые управляют движением механизмов поворота: руля направления, двигателей, руля высоты.
Система глобального позиционирования (GPS) 37 определяет координаты места нахождения беспилотного летательного аппарата. Видеосигнал с купольной видеокамеры 5 через трал 36, первый терминал 39 поступает на приемопередающую станцию 40, распределяется через коммутатор 41 и посредством Интернета 42 выводится на компьютер 43 и (или) через приемопередающую станцию 40 сигнал поступает на второй терминал 44 и компьютер 43.
Купольная видеокамера 5, например Panasonic WV-CW 860/64, позволяет наблюдать в вертикальной плоскости на 90°, горизонтальной плоскости на 360°. Возможна установка двух видеокамер для достижения объемного изображения для рассмотрения объекта в трех измерениях (длина, ширина, высота), что немаловажно при поисковых работах, когда необходима целостная картина восприятия.
При приземлении и взлете аппарат опирается на второй киль 8 и два двигателя 12, которые при приземлении и взлете находятся в вертикальном положении.
Итак, заявляемое изобретение позволяет значительно упростить конструкцию, расширить функциональные возможности беспилотного летательного аппарата за счет широкого диапазона высот и возможности зависания над объектом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ ВИДЕОФИКСАЦИИ НАРУШЕНИЯ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ С ПОМОЩЬЮ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2707666C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ КОМПЛЕКС | 2023 |
|
RU2810956C1 |
| Беспилотный летательный комплекс | 2024 |
|
RU2836414C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Беспилотный летательный комплекс | 2023 |
|
RU2816399C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |


Изобретение относится к беспилотным летательным аппаратам, предназначенным для наблюдения. Летательный аппарат содержит корпус, в котором расположены система глобального позиционирования, система программного автоматического управления, двигатель, соединенный с воздушным винтом, и видеоаппаратура. Корпус внутри содержит баллон, наполненный газом легче воздуха, и состоит из двух плоскостей, верхней и нижней, соединенных бандажом. На верхней плоскости расположены панель солнечной батареи и первый киль. На нижней плоскости расположены панель солнечной батареи, второй киль, технологические окна, купольная видеокамера, механизм поворота руля направления. Способ управления и передачи данных характеризуется тем, что сигнал подают по каналу сотовой связи посредством компьютера через второй терминал, с которого сигнал подают на приемопередающую станцию, распределяют коммутатором на трал и исполнительные цепи. Сигнал с купольной видеокамеры через трал, первый терминал подают на приемопередающую станцию, распределяют коммутатором и посредством Интернета выводят на компьютер или через приемопередающую станцию сигнал подают на второй терминал и компьютер. Технический результат - расширение функциональных возможностей. 2 н. и 1 з.п. ф-лы, 12 ил.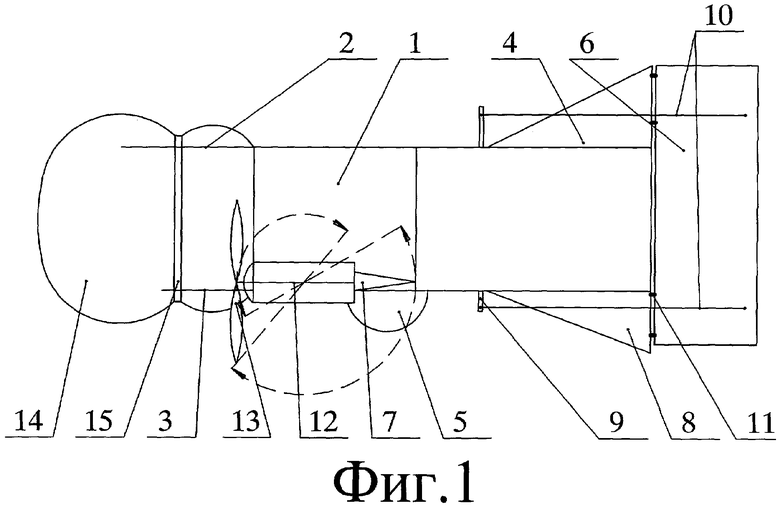
| СПОСОБ ПОИСКА И ПЕРЕХВАТА УГНАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228274C1 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО ДЛЯ РОТАЦИОННОЙ ПЕЧАТНОЙ МАШИНЫ | 1995 |
|
RU2127196C1 |
| JP 61182559 А, 15.08.1986. | |||

