Изобретение относится к области авиации, в частности к беспилотным летательным аппаратам (БПЛА), и может быть использовано для воздушного наблюдения с неподвижной или движущейся наземной или воздушной платформы, в качестве которой используется мультикоптер.
В настоящее время в основном оперативное обследование больших сухопутных и водных поверхностей производится с помощью авиационных комплексов на базе самолетов, вертолетов или космических аппаратов. В последнее время активно развиваются направления по использованию БПЛА. Эти технологии обладают рядом преимуществ, не требуют специально подготовленных площадок и стартовых комплексов, БПЛА сравнительно недороги в отличие от больших авиакомплексов, их применение не связано с риском для обслуживающего персонала. Многие страны успешно разрабатывают и внедряют БПЛА самолетного типа, получившие наибольшее развитие и, как следствие, распространение, а также активно применяются аппараты вертолетного типа для разного вида деятельности. Особенностью этих комплексов является возможность вертикального взлета и посадки, что определяет их основные преимущества (по сравнению с БПЛА самолетного типа).
Активное развитие электроники позволяет создавать как большие, так и довольно миниатюрные летательные комплексы с широким спектром возможностей, начиная от простого фото и видеонаблюдения в видимом спектре и заканчивая установкой тепловизионных и лазерных считывающих устройств. Если рассматривать возможность применения БПЛА для нужд как народного хозяйства, так и в военной деятельности для получения необходимых данных, то их применение раскрывает большие перспективы развития данных технологий.
Известен гибридный дирижабль (WO 2008025139 А1, 06.03.2008), состоящий из шаровидной оболочки фиксированного объема, заполненной легким газом, установленной на воздухоплавательном отсеке, от которой крестообразно отходят в стороны кронштейны с воздушно-винтовыми авиадвигателями на их оконечностях.
Недостатком этого устройства является оболочка, которая выполнена мягкой, ее неполное газозаполнение ведет к утрате ею шаровидной формы, ткань оболочки будет свисать произвольными складками без натяжения, что ухудшает обтекаемость и повышает парусность аппарата.
Известен беспилотный авиационный комплекс фирмы «Израел Аэроспэйс Индастриз ЛТД» (заявка WO 2007/141795 A1, В64С 27/20, 13.12.2007), включающий наземную станцию и беспилотный привязной летательный аппарат в виде платформы, несущей полезную нагрузку и движитель в виде четырех вентиляторов с электроприводом. Привязь, связывающая наземную станцию с платформой беспилотного летательного аппарата, состоит из силового троса и многофункционального кабеля, обеспечивающего электрическую связь и связь управления. Воздушные винты вентиляторов обеспечивают вертикальную подъемную силу и позволяют поддерживать заданную высоту платформы на режиме висения и полета. Винты вентиляторов могут выполняться с изменяемым углом установки лопастей или снабжаться щитками регулируемого отклонения для изменения пространственного положения БПЛА.
Недостатком этого устройства является использование свободной привязи беспилотного летательного аппарата, которая требует сложной системы отслеживания пространственного положения платформы и управления им. Сложность системы управления и стабилизации положения беспилотного летательного аппарата приводит к повышению веса БПЛА и снижению его надежности и обуславливает высокую стоимость элементов системы.
Наиболее близкой по технической сущности к заявленному изобретению является комплекс аппаратуры для воздушного наблюдения, (RU 2535381, 2014 г.), включающий размещение тепловизионной камеры на привязном аэростате с возможностью кругового вращения камеры вокруг вертикальной оси и изменения угла наклона камеры к вертикальной оси за счет размещения ее на горизонтальном валу.
Недостатком этого устройства является наблюдение только в одном диапазоне спектра частот, недостаточная дальность наблюдения, низкая мобильность предложенного устройства, ограниченное использование на местности со сложным рельефом и ограниченными подъездными путями.
Задачей изобретения является создание мобильной системы наблюдения, соединяющей в себе положительные черты как мультикоптера, так и аэростата, - системы, которая будет иметь возможность скрытно развертываться в самых труднопроходимых местах, и длительное время вести наблюдение за протяженным участком местности.
Требуемый технический результат достигается тем, что аэромобильная система воздушного наблюдения включает в себя мультикоптер и привязной аэростат. Аэростат расположен в центральной части мультикоптера, во время доставки к месту наблюдения он зафиксирован стопорами в сложенном состоянии. Верхняя часть аэростата представляет собой жесткую полусферу с нанесенной солнечной батареей и травящим клапаном. Средняя часть аэростата выполнена из эластичного газонепроницаемого материала, внутри которого расположен баллон с клапаном, заполненный сжатым подъемным газом. Нижняя часть аэростата представляет собой платформу с видеокамерой кругового обзора нижней сферы в видимом и инфракрасном спектре. На мультикоптере расположены, равномерно распределенные по весовым характеристикам, блоки глобальной навигационной системы GPS/ГЛОНАСС, системы связи и управления, аккумуляторные батареи. В нижней части мультикоптера для установки и возвращения аэростата расположена электролебедка. Трос, используемый для подъема и спуска аэростата, представляет собой антенну радиосвязи, кабель управления и электропитания, по нему электроэнергия, вырабатываемая солнечной батареей или от аккумуляторной батареи, поступает потребителям, а полученное изображение через систему управления передается на пункт управления.
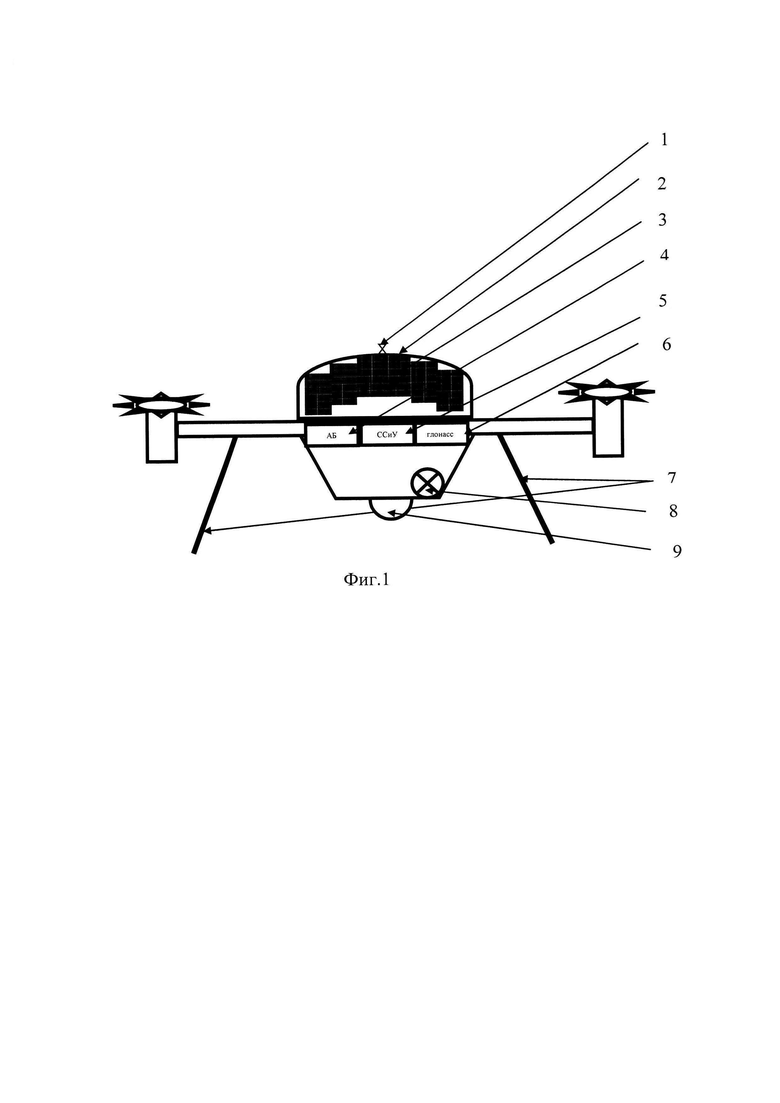
Сущность изобретения поясняется чертежами, где на Фиг. 1 представлена аэромобильная система воздушного наблюдения в готовности к перелету к месту наблюдения, она включает в свой состав:
1 - травящий клапан;
2 - жесткая полусфера;
3 - солнечная батарея;
4 - аккумуляторная батарея;
5 - система связи и управления;
6 - блоки глобальной навигационной системы GPS/ГЛОНАСС;
7 - шасси;
8 - электролебедка;
9 - видеокамера.
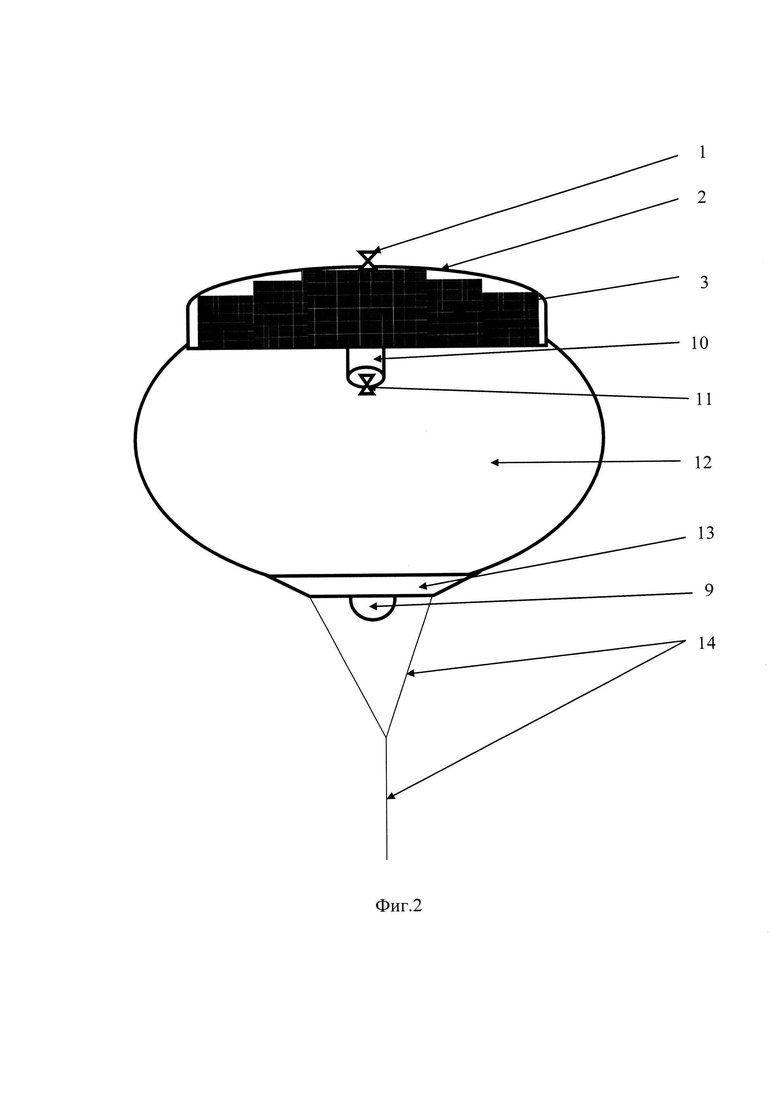
На Фиг. 2 представлен привязной аэростат аэромобильной системы воздушного наблюдения, где:
10 - баллон со сжатым подъемным газом;
11 - клапан;
12 - корпус аэростата;
13 - платформа;
14 - трос.
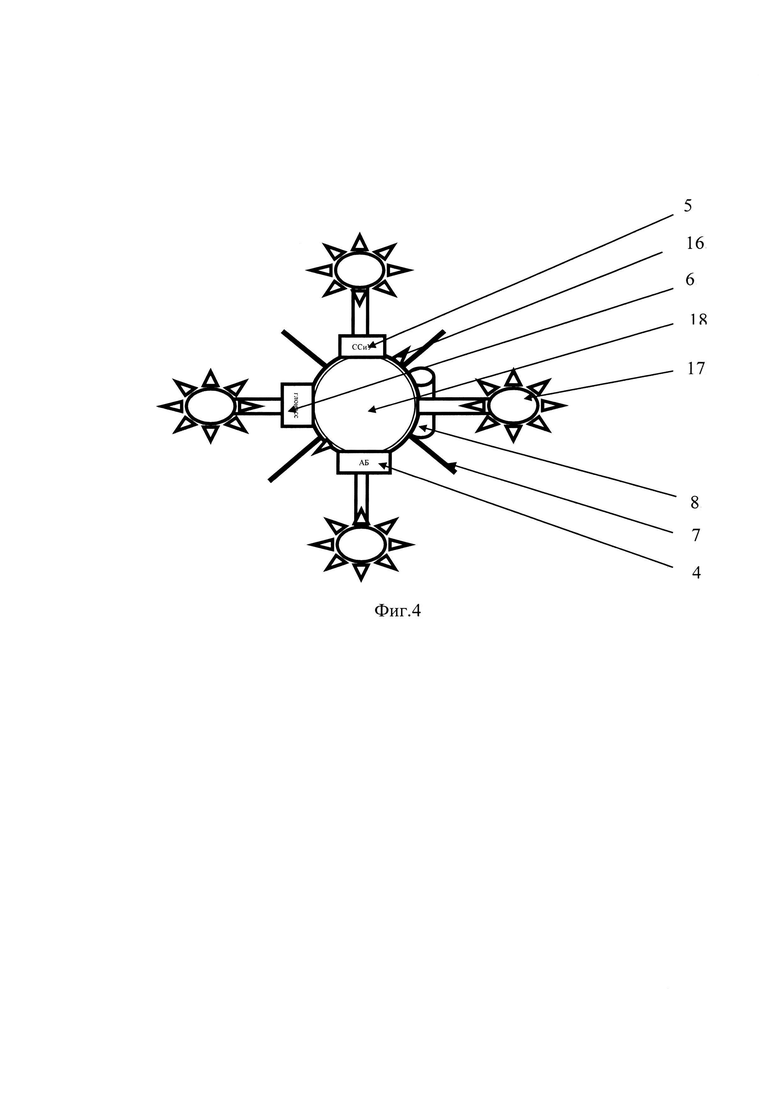
На Фиг. 3 представлена аэромобильная система воздушного наблюдения в работе, где:
15 - мультикоптер;
16 - стопорные устройства.
На Фиг. 4 представлена схема мультикоптера без привязного аэростата, где:
17 -двигатели мультикоптера;
18 - место для крепления аэростата.
Изобретение работает следующим образом: аэромобильная система воздушного наблюдения при помощи транспортных средств доставляется в район применения. В дальнейшем осуществляется подготовка к полету. Запускаются двигатели (17) и мультикоптер (15) под управлением оператора осуществляет взлет и движение в заданном направлении. Оператор с помощью видеокамеры аэромобильной системы воздушного наблюдения выбирает место и осуществляет посадку мультикоптера (15). При необходимости имеется возможность осуществления полета мультикоптера (15) в заданную точку местности в автоматическом режиме по координатам глобальной навигационной системы GPS/ГЛОНАСС (6). После посадки мультикоптера, по программе или команде оператора система связи и управления (5) формирует команду на открытие клапана (11) на баллоне со сжатым подъемным газом (10), находящемся в корпусе аэростата (12). Корпус аэростата (12) заполняется подъемным газом, размыкаются стопорные устройства (16) и аэростат осуществляет подъем. Высота подъема регулируется разматыванием троса (14) с электролебедки (8) и задается системой связи и управления (5) в зависимости от команд, полученных с пункта управления.
Видеокамера (9) кругового обзора расположенная на платформе (13) осуществляет обзор местности. В зависимости от времени суток и необходимости наблюдение осуществляется как в видимом, так и инфракрасном спектре. Для экономии электроэнергии возможно наблюдение в дискретном режиме.
Электроэнергия для полета мультикоптера, средств наблюдения, связи и управления обеспечивается за счет использования аккумуляторной батареи (4) и солнечной батареи (3). Солнечная батарея (3) позволяет пополнять запасы электроэнергии в аккумуляторной батарее (4). Возможность пополнения энергии позволяет аэромобильной системе воздушного наблюдения длительное время осуществлять наблюдение за данной местностью. Полученное изображение в реальном масштабе времени, по определенной программе или запросу передается системой связи и управления (5) на пункт управления.
При необходимости увеличения зоны наблюдения или оперативного изменения цели наблюдения возможно перемещение аэромобильной системы воздушного наблюдения в развернутом виде как по высоте, так и по месту нахождения объекта.
По окончании задач наблюдения организуется приведение аэромобильной системы воздушного наблюдения в готовность к перелету к месту дислокации или встречи. Для этого по команде с пункта управления система связи и управления (5) выдает команду на электролебедку (8) и на травящий клапан (1). Аэростат избавляется от подъемного газа, уменьшает объем и затягивается внутрь мультикоптера (15). Жесткая полусфера (2) фиксируется в стопорных устройствах (16). Платформа (13) с видеокамерой (9) становится на штатное место для крепления (18) в мультикоптере (15). По готовности и команде с пункта управления запускаются двигатели (17) мультикоптера (15) и осуществляется взлет. Полет осуществляется по координатам глобальной навигационной системы GPS/ГЛОНАСС (6) или под управлением оператора.
Использование аэромобильной системы воздушного наблюдения позволяет оперативно организовывать наблюдение за интересующими участками местности, скрытно разворачивать систему наблюдения в труднопроходимых местах и длительное время вести наблюдение, обеспечивая наблюдение за протяженным участком местности как самостоятельно, так и с учетом ранее размещенных на местности имеющихся технических средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| Беспилотная система мониторинга поверхности земли | 2022 |
|
RU2788553C1 |
| Энергонезависимый многоцелевой беспилотный летательный аппарат | 2020 |
|
RU2741825C1 |
| Система наблюдения за надводной и подводной обстановкой | 2022 |
|
RU2787578C1 |
| Аэростатная система наблюдения | 2021 |
|
RU2761326C1 |
| Многоцелевой беспилотный летательный аппарат | 2021 |
|
RU2763896C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА | 2015 |
|
RU2600556C1 |
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| Беспилотный летательный аппарат для эвакуации раненых и доставки грузов | 2024 |
|
RU2829580C1 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |

Изобретение относится к области авиации, и касается беспилотных летательных аппаратов (БПЛА), и может быть использовано для воздушного наблюдения. Аэромобильная система воздушного наблюдения включает в себя мультикоптер и привязной аэростат. Аэростат расположен в центральной части мультикоптера, который во время доставки к месту наблюдения зафиксирован стопорами в сложенном состоянии. Верхняя часть аэростата представляет собой жесткую полусферу с нанесенной солнечной батареей и травящим клапаном. Средняя часть аэростата выполнена из эластичного газонепроницаемого материала, внутри которого расположен баллон с клапаном, заполненный сжатым подъемным газом. Нижняя часть аэростата представляет собой платформу с видеокамерой кругового обзора нижней сферы в видимом и инфракрасном спектре. На мультикоптере расположены равномерно распределенные по весовым характеристикам блоки глобальной навигационной системы GPS/ГЛОНАСС, системы связи и управления, аккумуляторные батареи. В нижней части мультикоптера для установки и возвращения аэростата расположена электролебедка. Трос, используемый для подъема и спуска аэростата, представляет собой антенну радиосвязи, кабель управления и электропитания. 4 ил.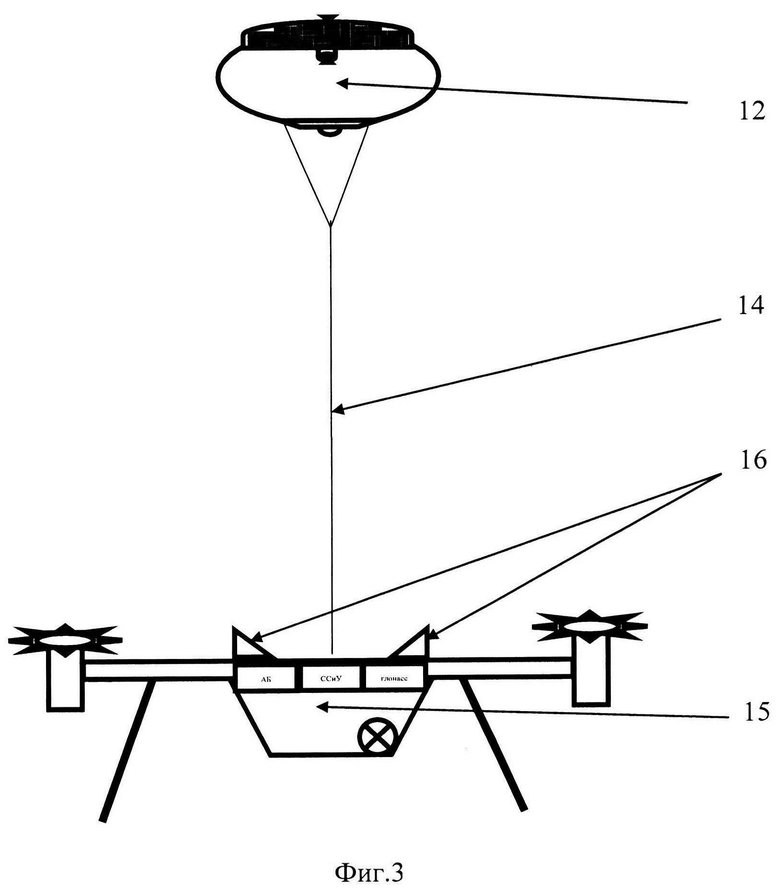
Аэромобильная система воздушного наблюдения, состоящая из мультикоптера и привязного аэростата, отличающаяся тем, что в центральной части мультикоптера располагается аэростат, зафиксированный стопорами в сложенном состоянии, верхняя часть аэростата представляет собой жесткую полусферу с нанесенной солнечной батареей и травящим клапаном, под полусферой внутри эластичного газонепроницаемого материала расположен баллон с клапаном, заполненный сжатым подъемным газом, в нижней части аэростата расположена платформа с видеокамерой кругового обзора в нижней сфере в видимом и инфракрасном спектре, на мультикоптере расположены блоки глобальной навигационной системы GPS/ГЛОНАСС, системы связи и управления, аккумуляторная батарея, в нижней части мультикоптера расположена электролебедка с тросом, представляющим собой антенну связи, кабель управления и электропитания.
| CN 207773417 U, 28.08.2018 | |||
| CN 107554746 А, 09.01.2018 | |||
| Способ отверждения ненасыщенных полиэфирных смол | 1960 |
|
SU138371A1 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2485018C1 |
| US 10850842 В2, 01.12.2020 | |||
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПИТАНИЯ ПРИВЯЗНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2711325C1 |

