Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известна система наведения управляемого снаряда [1], содержащая гироскоп инерциальный (ГИ), рулевой привод (РП) и головку самонаведения (ГСН), выход "Захват" которой соединен с первым входом первого элемента И и входом элемента НЕ, выход которого соединен с первым входом второго элемента И, второй вход которого соединен с третьим выходом гироскопа инерциального, второй выход которого соединен со вторым входом первого элемента И, выход первого элемента И соединен со входом "Компенсация" ГСН и со вторым входом первого элемента ИЛИ, третий вход которого соединен с первым выходом гироскопа инерциального и входом первого усилителя мощности, выход которого соединен с первым выводом электровоспламенителя механизма раскрытия рулей рулевого привода, второй вывод которого соединен с первым полюсом источника питания, выход первого элемента ИЛИ соединен со входом второго усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен со входом третьего усилителя мощности, выходы головки самонаведения "-Y" и "+Y" соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы головки самонаведения "+Z" и "-Z" соединены со входами четвертого и пятого усилителей мощности соответственно, выходы второго, третьего, четвертого и пятого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых и вход гироскопа инерциального соединены со вторым полюсом источника питания бортовой аппаратуры.
Существенным недостатком данной системы управления является тот факт, что в момент раскрытия рулей снаряд получает возмущающее воздействие, которое приводит к колебательному процессу.
При этом одновременно с моментом раскрытия рулей от ламельного датчика инерциального гироскопа на рулевой привод подается команда управления (сигнал компенсации силы тяжести).
Под действием суммарного воздействия управляющей команды и возмущения, вызванного раскрытием рулей, амплитуда колебаний снаряда может достигнуть критической величины, что приводит к ухудшению точности системы.
Задачей предлагаемого изобретения является повышение точности наведения управляемого снаряда за счет разнесения во времени момента раскрытия рулей и начало управления.
При этом команда управления на рулевой привод подается через временной интервал Тзад по отношению к моменту раскрытия рулей, определяемый временем переходного процесса, достаточным для затухания колебаний и зависящим от параметров конкретного управляемого снаряда.
Для достижения поставленной задачи в систему наведения управляемого снаряда, содержащую схему задержки, триггер, шесть элементов И, гироскоп инерциальный, рулевой привод и головку самонаведения, выход "Захват" которой соединен с первым входом первого элемента И и входом элемента НЕ, выход которого соединен с первым входом второго элемента И, второй вход которого соединен с третьим выходом гироскопа инерциального, второй выход которого соединен со вторым входом первого элемента И, выход первого элемента И соединен со входом "Компенсация" головки самонаведения и со вторым входом первого элемента ИЛИ, третий вход которого соединен с первым выходом гироскопа инерциального и входом первого усилителя мощности, выход которого соединен с первым выводом электровоспламенителя механизма раскрытия рулей рулевого привода, второй вывод которого соединен с первым полюсом источника питания, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выходы головки самонаведения "-Y" и "+Y" соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы второго, третьего, четвертого и пятого усилителей мощности соединены соответственно с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, а вторые входы обмоток управления и вход гироскопа инерциального соединены со вторым полюсом источника питания, введены схема установки в исходное состояние, а в качестве триггера использован RS-триггер, выходы третьего, четвертого, пятого и шестого элементов И соединены со входами второго, третьего, четвертого и пятого усилителей мощности соответственно, а вторые входы этих элементов И соединены с выходом RS-триггера, R-вход которого соединен с выходом схемы установки в исходное состояние, вход которой соединен со вторым полюсом источника питания, a S-вход - с выходом схемы задержки, вход которой соединен с первым выходом гироскопа инерциального, первые входы третьего, четвертого элементов И соединены с выходами первого и второго элементов ИЛИ соответственно, а первые входы пятого и шестого элементов И соединены с выходами "+Z" и "-Z" головки самонаведения соответственно
На чертеже приведена блок-схема предлагаемой системы, где:
1 - головка самонаведения, выполненная например, как в прототипе, 2 - гироскоп инерциальный с ламельным датчиком, выполненный, например, как в прототипе, 3 - рулевой привод, 4 - элемент НЕ, 5, 6 - первый и второй элементы И, 7, 8 - первый и второй элементы ИЛИ, 9 - схема задержки, 10 - схема установки в исходное состояние, 11 - RS-триггер, 12, 13, 14 и 15 - третий, четвертый, пятый и шестой элементы И, 16, 17, 18, 19 и 20 - первый, второй, третий, четвертый и пятый усилители мощности, 21 - электровоспламенитель механизма раскрытия рулей рулевого привода, 22, 23, 24 и 25 - первая, вторая, третья и четвертая обмотки управления рулевого привода.
Работает система наведения следующим образом.
Производится выстрел и снаряд летит по баллистической траектории. В расчетной точке траектории разарретируется и раскручивается ротор гироскопа инерциального 2, выходит на режим батарея питания бортовой аппаратуры.
После разгона ротора гироскопа инерциального последний приобретает гироскопические свойства и его главная ось запоминает положение продольной оси снаряда в момент разарретирования. Под действием силы тяжести продольная ось снаряда изменяет свою ориентацию в вертикальной плоскости. При этом происходит смещение ламельного датчика относительно токоввода гироскопа инерциального. На инерциальном участке наведения, когда сигнал "Захват" с выхода головки самонаведения отсутствует, при достижении заданного угла пеленга ламельный датчик формирует сигнал по выходу 1 гироскопа инерциального, который поступает на вход первого усилителя мощности 16 и далее на электровоспламенитель механизма раскрытия рулей 21 рулевого привода 3. Под действием этого сигнала раскрываются рули рулевого привода. В расчетной точке траектории происходит задействование батарей, питающих головку самонаведения, и происходит отделение блока носового, открывается входной зрачок головки самонаведения.
Одновременно сигналы компенсации силы тяжести с выходов 1 и 3 гироскопа инерциального поступают соответственно на третий вход первого элемента ИЛИ 7 и через второй вход второго элемента И 6 на второй вход второго элемента ИЛИ 8 и далее на первые входы третьего элемента И 12 и четвертого элемента И 13, но далее они не проходят, т.к. на вторые входы третьего 12, четвертого 13, пятого 14 и шестого 15 элементов И приходит сигнал лог.0 с выхода RS-триггера 11, который устанавливается в нулевое состояние под действием импульса с выхода схемы установки в исходное состояние 10 по выходу бортового источника питания на режим. Сигнал с выхода 1 гироскопа инерциального поступает также на вход схемы задержки 9, которая задерживает начало инерциального наведения на время переходного процесса, вызванного воздействием на него перегрузок, связанных с раскрытием рулей. Сигнал с выхода схемы задержки 9 поступает на S-вход RS-триггера и устанавливает на его выходе сигнал лог.1, которая, поступая на вторые входы третьего 12, четвертого 13, пятого 14 и шестого 15 элементов И, разрешает проход сигналов, поступающих на их первые входы.
Т. о. сигналы с первого и третьего выходов гироскопа инерциального через второй 17 и третий 18 усилители мощности будут проходить соответственно на первую 22 и вторую 23 обмотки управления рулевого привода, осуществляя тем самым инерциальное наведение снаряда, причем начало инерциального наведения разнесено во времени с моментом раскрытия рулей на время переходного процесса, вызванного их раскрытием.
При подлете снаряда к цели и при приеме отраженных от цели импульсов лазерного излучения ГСН 1 формирует сигнал "Захват", который, поступая на первый вход первого элемента И 5, разрешает проход импульсов с первого и второго выхода ГИ на вход "Компенсация" ГСН, а также поступая через инвертор 4 на первый вход второго элемента И 6, запрещает проход импульсов с третьего выхода гироскопа инерциального на рулевой привод.
При вращении снаряда на первом и втором выходах гироскопа вырабатываются импульсы, суммарная длительность которых приблизительно равна половине периода вращения снаряда.
Под действием этого сигнала ось ГСН будет стремиться разворачиваться в вертикальной плоскости вниз, а в ГСН при этом будет вырабатываться сигнал, компенсирующий влияние прецессии, обусловленной сигналом с инерциального гироскопа, при этом сигнал на выходе ГСН в процессе ее слежения за целью будет иметь следующий вид:
J = f(e-é),
где f - функция, определяемая пеленгационной характеристикой ГСН, е - угловая скорость линии "снаряд-цель", é - угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
Указанный сигнал является исходным для формирования импульсов управления рулевым приводом автопилота (сигналов, вырабатываемых ГСН по выходам "+Y", "-Y", "+Z", "-Z").
При этом под действием сигнала "Компенсация" и сигнала рассогласования ГСН на ее выходе "-Y" формируется суммарный сигнал, который поступает на вход второго усилителя мощности 17, а с выхода его на первый вход обмотки управления 22. Под действием этого сигнала происходят отклонение рулей и отработка рассогласования ГСН и компенсация веса снаряда в течение первого полупериода вращения снаряда. С выхода "+Y" сигнал поступает через второй элемент ИЛИ 8 и элемент И 13 на вход второго усилителя мощности 18 и далее на вторую обмотку управления 23 рулевого привода 3. С выходов "+Z" и "-Z" сигналы поступают через пятый 14 и шестой 15 элементы И на входы четвертого 19 и пятого 20 усилителей мощности, а с их выходов на первые входы обмоток управления 24 и 25. Под действием этих сигналов происходят отклонение рулей и отработка рассогласования в горизонтальном канале.
Т. о. разнесением во времени момента раскрытия рулей и начала управления снарядом удалось уменьшить колебательность системы на начальном этапе наведения и тем самым повысить точность наведения.
Источник информации
1. 152-мм выстрел 3ВОФ64 (3ВОФ93) с осколочно-фугасным управляемым снарядом 3ОФ39 и зарядом 1 (Уменьшенным переменным зарядом). Техническое описание и инструкция по эксплуатации 3ВОФ64.00.00.000ТО (3ВОФ93.00.00.000ТО)". - М.: Военное издательство, 1990, стр. 56-64.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2187781C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
Изобретение относится к вооружению, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Техническим результатом настоящего предложения является повышение точности наведения. Система наведения управляемого снаряда содержит гироскоп инерциальный, рулевой привод и головку самонаведения, выход "Захват", который соединен с первым входом первого элемента И и входом элемента НЕ, выход которого соединен с первым входом второго элемента И, второй вход которого соединен с третьим выходом гироскопа инерциального, второй выход которого соединен со вторым входом первого элемента И. Выход первого элемента И соединен со входом "Компенсация" головки самонаведения и со вторым входом первого элемента ИЛИ, третий вход которого соединен с первым выходом гироскопа инерциального и входом первого усилителя мощности, выход которого соединен с первым выводом электровоспламенителя механизма раскрытия рулей рулевого привода, второй вывод которого соединен с первым полюсом источника питания. Выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выходы головки самонаведения "-Y", "+Y" соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы второго, третьего, четвертого и пятого усилителей мощности соединены соответственно с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода. Вторые входы обмоток управления и вход гироскопа инерциального соединены со вторым полюсом источника питания, введены схема задержки, RS-триггер, схема установки в исходное состояние, третий, четвертый, пятый и шестой элементы И, причем выходы этих элементов соединены со входами второго, третьего, четвертого и пятого усилителей мощности соответственно, а вторые входы этих элементов И соединены с выходом RS-триггера, R-вход которого соединен с выходом схемы установки в исходное состояние, вход которой соединен со вторым полюсом источника питания, а S-вход - с выходом схемы задержки, вход которой соединен с первым выходом гироскопа инерциального. Первые входы третьего, четвертого элементов И соединены с выходами первого и второго элементов ИЛИ соответственно, а первые входы пятого и шестого элементов И соединены с выходами "+Z" и "Z" головки самонаведения соответственно. 1 ил.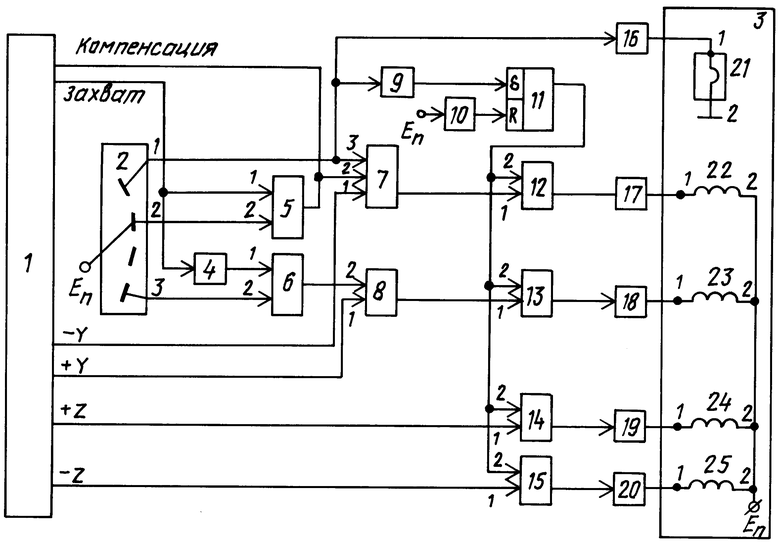
Система наведения управляемого снаряда, содержащая схему задержки, триггер, шесть элементов И, гироскоп инерциальный, рулевой привод и головку самонаведения, выход "Захват" которой соединен с первым входом первого элемента И и входом элемента НЕ, выход которого соединен с первым входом второго элемента И, второй вход которого соединен с третьим выходом гироскопа инерциального, второй выход которого соединен с вторым входом первого элемента И, выход первого элемента И соединен с входом "Компенсация" головки самонаведения и с вторым входом первого элемента ИЛИ, третий вход которого соединен с первым выходом гироскопа инерциального и входом первого усилителя мощности, выход которого соединен с первым выводом электровоспламенителя механизма раскрытия рулей рулевого привода, второй вывод которого соединен с первым полюсом источника питания, выход второго элемента И соединен с вторым входом второго элемента ИЛИ, выход головки самонаведения -Y, +Y соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы второго, третьего, четвертого и пятого усилителей мощности соединены соответственно с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, а вторые входы обмоток управления и вход гироскопа инерциального соединены с вторым полюсом источника питания, отличающаяся тем, что она снабжена схемой установки в исходное состояние, а в качестве триггера использован RS-триггер, выходы третьего, четвертого, пятого и шестого элементов И соединены с входами второго, третьего, четвертого, и пятого усилителей мощности соответственно, а вторые входы третьего, четвертого, пятого и шестого элементов И соединены с выходом RS-триггера, R-вход которого соединен с выходом схемы установки в исходное состояние, вход которой соединен с вторым полюсом источника питания, а S-вход - с выходом схемы задержки, вход которой соединен с первым выходом гироскопа инерциального, первые входы третьего, четвертого элементов И соединены с выходами первого и второго элементов ИЛИ соответственно, а первые входы пятого и шестого элементов И соединены с выходами +Z и -Z головки самонаведения соответственно.
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М.: Военное издательство, 1990, с | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ КЛАССА "ВОЗДУХ-ВОЗДУХ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099665C1 |
| СПОСОБ НЕПРЕРЫВНОГО ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ С ПОЛИМЕРНЫМ ПОКРЫТИЕМ | 1997 |
|
RU2126322C1 |
| US 4606514 19.08.1986. | |||
