Изобретение относится к машиностроению, в частности к устройствам для балансировки вращающихся тел.
Известно устройство для статической балансировки [1], которое представляет из себя две заостренные поверхности, закрепленные на желобообразном корпусе параллельно друг другу. Балансируемую деталь помещают на заостренные поверхности, слегка подталкивают и дают ей возможность свободно остановиться. Ее более тяжелая часть, после остановки, всегда займет нижнее положение. После этого или убирают материал детали с более тяжелой стороны, или же добавляют с противоположной ей стороны.
Недостатком этого устройства является то, что при его применении используется ручная балансировка, которая занимает много времени и обеспечивает плохую точность.
Наиболее близким техническим решением является станок [1], на который устанавливают деталь на упругие опоры и присоединяют к приводу. Частоту вращения доводят до значения, чтобы система вошла в резонанс.
Недостатком этого устройства является то, что уравновешивание масс детали проводят вручную, удаляя часть материала, где его больше, или добавляя его с противоположной стороны. Этот процесс требует много времени, и точность его невысокая.
Технической задачей изобретения является разработка устройства, обеспечивающего автоматическую как статическую, так и динамическую балансировки тел вращения.
Технический результат изобретения достигается тем, что что в состав устройства входят два технологических лазера, лучи от которых, при их включении, падают на торцевые поверхности вращающегося тела и испаряют материал в точке падения, уменьшая тем самым его массу; два пьезодатчика, установленные в нижних точках обеих опор при закреплении тела вращения на станке, которые вырабатывают электрический сигнал, в частности электрическое напряжение, в зависимости от величины силы, действующей на них; два усилителя электрического напряжения, усиливающие электрические сигналы с пьезодатчиков, каждый со своего; компьютер, в котором установлен драйвер, управляющий лазерами; причем, если электрические сигналы с пьезодатчиков отличаются друг от друга по величине, то сначала осуществляется динамическая балансировка многократным кратковременным включением одного лазера со стороны большего, по величине, сигнала до тех пор, пока сигналы не уравняются, после чего осуществляется статическая балансировка многократным и кратковременным, на время, посредине максимума сигнала, например на 0,1 времени одного оборота, в зависимости от скорости вращения балансируемого тела, включением обеих лазеров, до момента, когда исчезнут сигналы от пьезодатчиков, вызванные разбалансировкой тела вращения, причем сигналы с пьезодатчиков, обусловленные силой тяжести тела вращения, определяются заранее в невращающемся его положении и учитываются при выработке команд на лазеры компьютером.
Новыми признаками, обладающими существенными отличиями, являются:
1. Наличие двух технологических лазеров.
2. Наличие компьютера с драйвером.
3. Наличие пьезодатчиков в нижних точках каждой опоры.
4. Связи между составными элементами.
Использование новых признаков, в совокупности с известными, и новых связей между ними обеспечивает достижение технического результата изобретения, а именно: создание автоматического устройства для балансировки тел вращения с достаточной точностью.
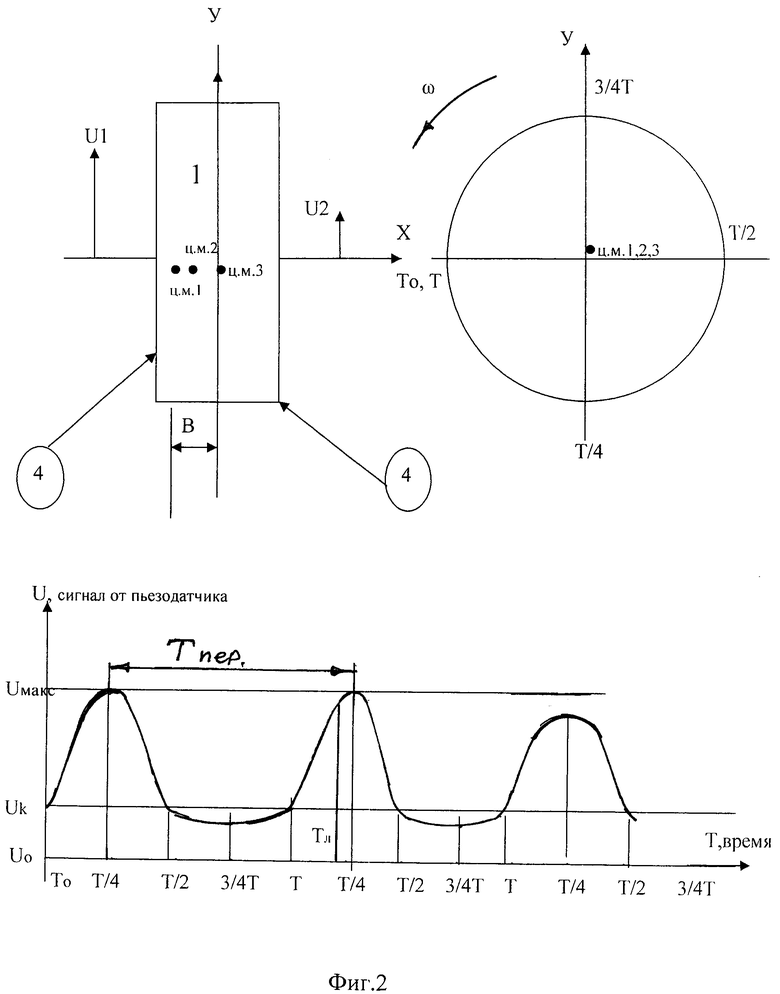
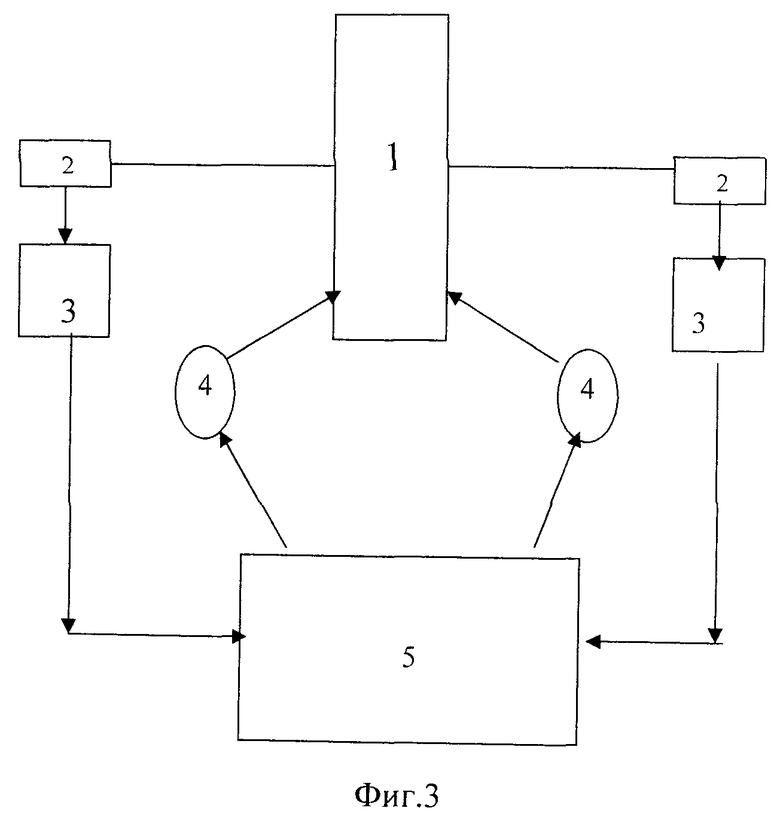
На фиг.1 схематично представлено балансируемое тело вращения на опорах и расположение центра масс. На фиг.2 показано появление сигнала с пьезодатчиков при вращении балансируемого тела. На фиг.3 приведена блок
-схема составляющих устройство элементов.
Балансируемое тело 1 (фиг.1, вид «а») установлено на двух опорах, в которых действуют силы P и G, направленные вниз (на каждой опоре действует половина этих сил). Сила G есть сила тяжести тела вращения, которая прикладывается в центре масс балансируемого тела. Сила P и P1 вызываются разбалансировкой тела 1. Сила P определяется массой тела 1, расположенной ниже оси «О» тела вращения, а сила P1 - массой тела выше этой оси. Пьезодатчики 2 (фиг.1, вид «б») установлены в нижних точках каждой опоры. При действии на них сил, согласно пьезоэффекту, они вырабатывают электрический сигнал, в частности электрическое напряжение. На каждом из них появляется напряжение U1 и U2 , значения которых определяются величинами сил: чем больше сила, тем выше значение напряжения. Радиус балансируемого тела равен R, а скорость вращения - ω. Центр масс смещен относительно оси вращения на величину «С». На виде «б», фиг.1 показана динамическая разбалансировка, когда центр масс тела 1 находится левее (по чертежу) плоскости симметрии, в которой располагается ось «У», на величину «В». Следствием этого является то, что напряжение с левого пьезодатчика U1 больше, чем с правого U2 . Лазеры 4, если осуществляется статическая балансировка, убирают материал с обеих сторон вращающегося тела 1 в месте его избытка, перемещая центр масс к оси вращения снизу вверх в последовательности: ц.м. 1, ц.м. 2, ц.м. 3 и т.д.
На фиг.2 показана динамическая балансировка, обеспечиваемая левым лазером 4, когда центр масс перемещается к плоскости симметрии по оси «Х»: ц.м. 1, ц.м. 2, ц.м. 3 и т.д. При разбалансировке максимальные значения сил, действующих на опоры и вызывающих появление максимальных значений напряжений Uмакс , происходят через время Т/4, где Т - время одного оборота те л а 1. Периодичность максимумов Uмакс Тпер. составляет время одного оборота Т. Когда лазерами убирается материал балансируемого тела, то напряжение Uмакс уменьшается. На фиг.3 представлен состав предлагаемого устройства, куда входят: балансируемое вращающееся тело 1, пьезодатчики 2, усилители электрического напряжения 3, лазеры 4, компьютер, который имеет драйвере.
Устройство для автоматической балансировки тел вращения работает следующим образом.
Устанавливается на станок балансируемое тело 1, закрепляется, соединяется с приводом, проводятся все подготовительные работы, в том числе соединение элементов друг с другом, с источником питания и т.д. Затем определяется напряжение U, которое появляется с пьезодатчиков от воздействия силы тяжести тела 1 и которое компьютером будет в дальнейшем вычитаться. После этого включается привод, и тело 1 начинает вращаться со скоростьюω. Если имеется разбалансировка, то появятся напряжения U1 и U2 которые могут быть одинаковыми (нет динамической разбалансировки) или разными (есть динамическая разбалансировка). Если эти напряжения отсутствуют, то значит тело 1 сбалансировано. Если существуют динамическая и статическая разбалансировки, то первоначально осуществляется динамическая балансировка (хотя может сначала выполняться и статическая балансировка). Компьютер 5 с драйвером выдает команду лазеру, со стороны которого поступил более сильный сигнал с пьезодатчика. Лазер включается на короткие промежутки времени на каждом обороте тела 1, например на 0,1 периода вращения. В каком месте вращающегося тела будет включен лазер, значения не имеет. Убирая малыми порциями материал тела 1, лазер постепенно центр масс перемещает в плоскость симметрии. Когда сигналы U1 и U2 станут одинаковыми, компьютер выдаст команду работавшему лазеру на его выключение. После этого начнет осуществляться статическая балансировка. Компьютер будет выдавать команду на включение обеих лазеров кратковременно и одновременно в моменты прохождения телом 1 точек падения лучей лазера местами с избыточной массой. Это будет происходить в момент Тл. (см. фиг.2), учитывая инерционность работы лазера. Точки падения лучей лазеров находятся на вертикальной прямой между осью вращения тела 1 и пьезодатчиками. Период появления Uмакс. будет постоянным для данной скорости вращения тела 1. Однако величина Uмакс. с каждым включением лазеров будет уменьшаться, так как будет удаляться материал с балансируемого тела. Лазеры будут включаться в работу до тех пор, пока напряжения U1 и U2 не станут равными нулю. Этот момент считается окончанием балансировки.
Использование заявляемого изобретения позволяет резко сократить время на проведение балансировки вращающихся тел, повышает точность балансировки, что увеличивает срок эксплуатации этих тел, улучшает условия работы при балансировке, так как этот процесс происходит в автоматическом режиме.
Источники информации
1. Гельберг Б.Т., Пекелис Г.Д. Ремонт промышленного оборудования. - М.: Высшая школа, 1977. - С.147-149.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ | 2000 |
|
RU2185609C2 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПУТЕМ ДЕФОРМИРОВАНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО МАТЕРИАЛА ПОД ДЕЙСТВИЕМ ВНЕШНЕГО ГИДРОСТАТИЧЕСКОГО ДАВЛЕНИЯ | 2011 |
|
RU2470452C1 |
| СПОСОБ БАЛАНСИРОВКИ ШЛИФОВАЛЬНОГО КРУГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2173629C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ПОВЕРХНОСТИ И ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ | 2010 |
|
RU2445589C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| НЕРАЗРУШАЮЩИЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАПРЯЖЕНИЯ В ПОВЕРХНОСТНОМ СЛОЕ ИЗДЕЛИЯ И ОПРЕДЕЛИТЕЛЬ НАПРЯЖЕНИЯ | 2013 |
|
RU2534565C1 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2017 |
|
RU2674423C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА, ПОЛОЖЕНИЯ ЕГО ЦЕНТРА МАСС И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2400405C1 |
| ИЗМЕРИТЕЛЬ ШЕРОХОВАТОСТИ | 2008 |
|
RU2375677C1 |
Изобретение относится к измерительной технике, в частности к устройствам для балансировки вращающихся тел. В состав устройства входят станок для закрепления и вращения детали, два технологических лазера, лучи от которых, при их включении, падают на торцевые поверхности вращающегося тела и испаряют материал в точке падения, два пьезодатчика, установленные в нижних точках обеих опор при закреплении тела вращения на станке, которые вырабатывают электрический сигнал, в зависимости от величины силы, действующей на них, два усилителя электрического напряжения, усиливающие электрические сигналы с пьезодатчиков, каждый со своего, и компьютер, в котором установлен драйвер, управляющий лазерами. В процессе балансировки, в случае если электрические сигналы с пьезодатчиков отличаются друг от друга по величине, то сначала осуществляется динамическая балансировка многократным кратковременным включением одного лазера со стороны большего по величине сигнала до тех пор, пока сигналы не уравняются. Затем осуществляется статическая балансировка многократным и кратковременным, на время, посередине максимума сигнала, например на 0,1 времени одного оборота, в зависимости от скорости вращения балансируемого тела, включением обоих лазеров, до момента, когда исчезнут сигналы от пьезодатчиков, вызванные разбалансировкой тела вращения. Также предварительно определяется заранее поправка, обусловленная силой тяжести, действующей на пьезодатчики, и учитывающаяся в компьютере при выдаче управляющих команд на лазеры. Технический результат заключается в возможности осуществления автоматической как статической, так и автоматической балансировки тел вращения, при сокращении времени балансировки и повышении точности балансировки. 3 ил.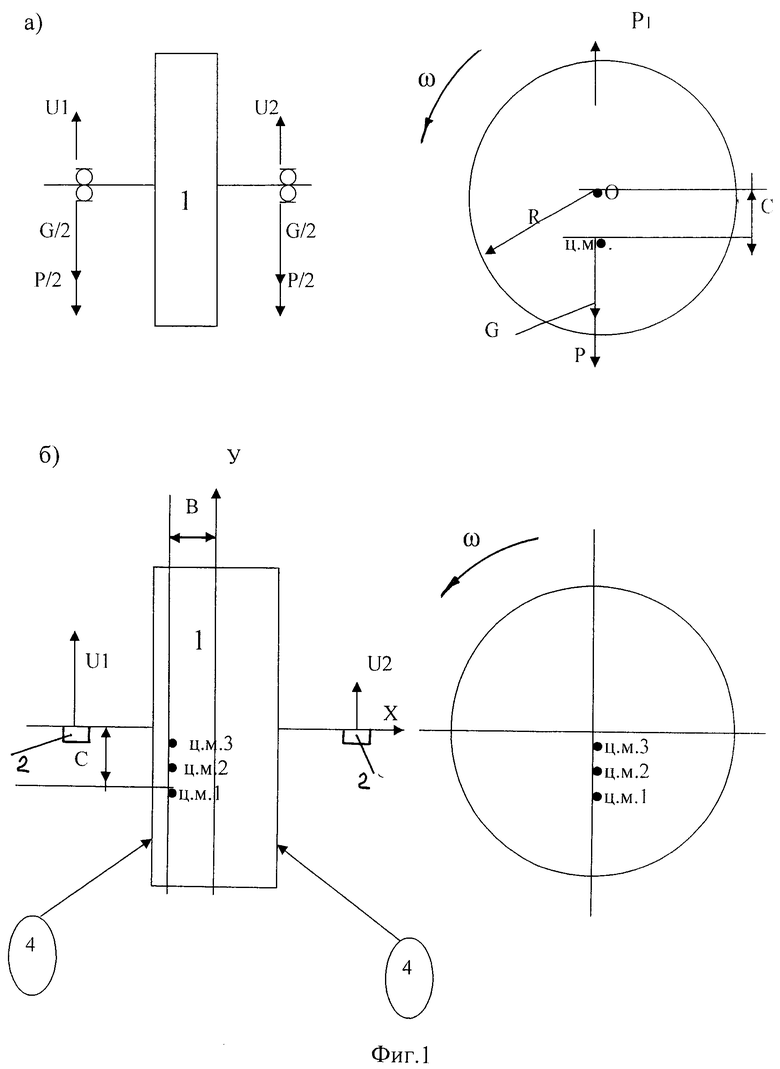
Устройство для автоматической балансировки тел вращения, включающее станок для закрепления и вращения детали с определенной регулируемой скоростью, отличающееся тем, что в состав устройства входят два технологических лазера, лучи от которых, при их включении, падают на торцевые поверхности вращающегося тела и испаряют материал в точке падения, уменьшая тем самым его массу; два пьезодатчика, установленные в нижних точках обеих опор при закреплении тела вращения на станке, которые вырабатывают электрический сигнал, в частности электрическое напряжение, в зависимости от силы, действующей на них; два усилителя напряжения, усиливающие электрические сигналы с пьезодатчиков, каждый со своего; компьютер, в составе которого имеется драйвер, управляющий лазерами, причем, если электрические сигналы с пьезодатчиков отличаются друг от друга по величине, то осуществляется динамическая балансировка многократным кратковременным включением одного лазера со стороны большего по величине сигнала до тех пор, пока эти сигналы не станут равными, после чего осуществляется статическая балансировка многократным и кратковременным, на время, посередине максимума сигнала, например на 0,1 времени одного оборота, в зависимости от скорости вращения балансируемого тела, включением обоих лазеров, до момента, когда исчезнут сигналы от пьезодатчиков, вызванные разбалансировкой тела вращения, причем сигналы с пьезодатчиков, обусловленные силой тяжести тела вращения, определяются заранее в невращательном его положении и учитываются при выработке команд на лазеры компьютером.
| Устройство для автоматической балансировки роторов в процессе их вращения | 1986 |
|
SU1388737A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1988 |
|
SU1649275A1 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ ЭЛЕКТРОННО-ОПТИЧЕСКИХ РОТОРОВ | 0 |
|
SU296011A1 |

