Изобретение относится к области радиотехники, в частности к способам и технике радиолокации, и может использоваться для формирования радиолокационного изображения объектов в интересах их распознавания.
Аналогом является способ обработки сигналов в РЛС, основанный на использовании специфического эффекта преобразования спектра зондирующего сигнала (ЗС) объектом с нелинейными электрическими свойствами (ОЭНС), включающий прием эхо-сигналов от ОЭНС на второй и третьей гармониках ЗС, обработку и индикацию их уровней для распознавания ОЭНС оператором (см., например, нелинейный радиолокатор «Люкс» [1]). Это обусловлено тем, что обычно радиолокационные цели, содержащие ОЭНС с полупроводниковыми компонентами, имеют на второй гармонике уровень сигналов отклика на 20-30 дБ более высокий, чем на третьей гармонике. Для ОЭНС контактного типа, как правило, выполняется обратное соотношение. Недостатками данного способа-аналога являются: низкая угловая разрешающая способность, а также ненадежность признака сравнения уровней эхо-сигналов от ОЭНС на второй и третьей гармониках ЗС и его информативность для радиолокационных целей, имеющих только нелинейности либо первого, либо второго типа. Таким образом, обработка сигналов в РЛС указанным способом не позволяет получать радиолокационные изображения (РЛИ) ОЭНС, являющиеся наиболее информативными при распознавании. Здесь под РЛИ понимается распределение нелинейной эффективной площади рассеяния (НЭПР) в пространстве по координатам «дальность - угловая координата».
Наиболее близким по технической сущности и достигаемому результату (прототипом) к заявляемому способу формирования радиолокационного изображения объектов является способ формирования радиолокационного изображения целей, при котором в РЛС реализуется алгоритм синтезирования апертуры (СА) антенны [2, с.178-186]. Синтезирование апертуры антенны сопровождается повышением угловой разрешающей способности РЛС. Однако используемые при реализации данного алгоритма процедуры не учитывают возможного для многих радиолокационных целей преобразования спектра ЗС ОЭНС, что не позволяет формировать РЛИ объектов с нелинейными электрическими свойствами.
Задачей, на решение которой направлено изобретение, является повышение информативности радиолокационного изображения объектов, формируемого РЛС с синтезированной апертурой антенны.
Техническим результатом изобретения является увеличение значения нормированной взаимной корреляционной функции формируемого радиолокационного изображения и эталонного изображения.
Указанный результат достигается тем, что в известном способе формирования радиолокационного изображения целей, основанном на реализации в РЛС алгоритма синтезирования апертуры антенны, дополнительно задают зону телескопического обзора по азимуту, равную зоне телескопического обзора РЛС по азимуту на частоте третьей гармоники зондирующего сигнала, совмещают максимум диаграммы направленности широкополосной приемной антенны с центром заданной зоны телескопического обзора, в течение временного интервала синтезирования апертуры антенны формируют сигналы, соответствующие радиолокационным изображениям на частотах второй и третьей гармоник зондирующего сигнала аналогично процессу создания сигнала, соответствующего радиолокационному изображению на несущей частоте зондирующего сигнала, преобразуют полученные сигналы к единому виду и формируют сигнал, соответствующий результирующему радиолокационному изображению, путем суммирования сигналов, соответствующих радиолокационным изображениям, сформированных на несущей частоте и на частотах второй и третьей гармоник зондирующего сигнала.
Сущность заявляемого способа поясняется фиг.1, где представлена модель функционирования РЛС в режиме телескопического обзора (ТО). Носитель РЛС перемещается прямолинейно и равномерно со скоростью V вдоль траектории от начальной точки D до конечной точки E и в течение заданного временного интервала синтезирования апертуры антенны TS проходит расстояние VTS. Точки D и Е выбираются симметрично относительно точки на траектории О, в которой линия визирования, проведенная через центр зоны ТО по азимуту, пересекает траекторию перемещения носителя РЛС под прямым углом, т.е.
 .
.
На траектории DE β0 - угловой размер СА, представляющий собой угловой сектор с размещенной внутри него СА, центр которого совпадает с центром зоны обзора [2, с.29]. При ТО обеспечивается непрерывное наблюдение за заданной зоной обзора путем изменения угла наблюдения при движении РЛС по траектории [2, с.49-50, 155]:

где θн0 - начальный угол наблюдения в точке D; R0 - расстояние от точки D до центра зоны телескопического обзора по азимуту. Требуемая полоса обзора по дальности составляет ΔR. Угловая ширина зоны ТО по азимуту, величина которой ограничивается шириной диаграммы направленности (ШДН) приемной антенны РЛС, на несущей частоте ЗС равна Δθобз=θ0,5, где θ0,5 - ШДН приемной антенны по уровню половинной мощности на несущей частоте ЗС [2, с.49]. Так как с увеличением номера гармоники ЗС в соответствии с выражением  , где n - номер гармоники ЗС (n=2, 3), уменьшается ШДН приемной антенны РЛС, то значения угловой ширины зоны ТО на частотах второй и третьей гармоник ЗС будут определены как
, где n - номер гармоники ЗС (n=2, 3), уменьшается ШДН приемной антенны РЛС, то значения угловой ширины зоны ТО на частотах второй и третьей гармоник ЗС будут определены как  и
и  соответственно. Линейный размер зон ТО по азимуту на частоте ЗС и на частотах второй и третьей гармоник ЗС составит соответственно:
соответственно. Линейный размер зон ТО по азимуту на частоте ЗС и на частотах второй и третьей гармоник ЗС составит соответственно:

где R - расстояние между центром соответствующих зон ТО и фазовым центром приемной антенны РЛС. Так как ΔL>ΔL2>L3, то для формирования РЛИ одних и тех же объектов необходимо задать зону ТО по азимуту, равную по величине зоне ТО по азимуту на частоте третьей гармоники ЗС ΔLZ=ΔL3.
В результате ТО при использовании известного способа формирования радиолокационного изображения целей, основанного на реализации в РЛС алгоритма синтезирования апертуры антенны [2, с.178-186], получают сигнал, соответствующий РЛИ на несущей частоте ЗС, а также дополнительно формируют сигналы, соответствующие РЛИ на частотах второй и третьей гармоник ЗС аналогично процессу создания сигнала, соответствующего РЛИ на несущей частоте ЗС.
Так как РЛИ представляет собой набор дискретных точек различной яркости, отображаемых системой индикации, то сигналы, соответствующие радиолокационным изображениям, полученным на несущей частоте и на частотах второй и третьей гармоник ЗС, являются совокупностью элементарных сигналов различной интенсивности в виде прямоугольных матриц А, В и С. Количество строк указанных матриц равно числу каналов дальности М, М2 и М3 на несущей частоте и на частотах второй и третьей гармоник ЗС соответственно и определяется требуемой полосой обзора по дальности ΔR, а также разрешающей способностью РЛС по дальности Δr:

Количество столбцов указанных матриц N, N2 и N3 равно числу отсчетов по азимуту в каждом из каналов дальности на несущей частоте и на частотах второй и третьей гармоник ЗС соответственно и определяется как:

где Δl, Δl2 и Δl3 - разрешающие способности по поперечной дальности на несущей частоте и на частотах второй и третьей гармоник ЗС соответственно.
Разрешающие способности по поперечной дальности при ТО на несущей частоте и на частотах второй и третьей гармоник ЗС будут равны [2, с.33]:

где λ - длина волны ЗС.
Подставляя значения (2) и (5) в соответствующие выражения (4), получим:

Таким образом, матрицы A, B и С при одинаковых размерах (М строк и N столбцов) соответствуют разным по величине зонам телескопического обзора по азимуту ΔL, ΔL2 и ΔL3.
Пусть М=3, N=12, тогда:
После этого формируют сигнал, соответствующий результирующему радиолокационному изображению. Этот процесс включает два этапа.
На первом этапе сигналы, соответствующие РЛИ, полученные на несущей частоте и на частотах второй и третьей гармоник ЗС, сначала приводятся к единому виду, т.е. преобразуются таким образом, чтобы каждый из них содержал информацию об объектах, расположенных только внутри заданной зоны телескопического обзора по азимуту ΔLZ=ΔL3. Для этого необходимо из матриц А и В получить матрицы А' и В', каждая из которых при одинаковом количестве строк, равном М, будет включать различное число столбцов, определяемое соответственно как


Матрица А' получается путем исключения из матрицы A i-х столбцов, где

и j-х столбцов, где
матрица В' - путем исключения из матрицы В m-х столбцов, где
и n-х столбцов, где


Матрица С остается без изменений.
Далее с помощью увеличения масштаба матриц А' и В' по азимуту в 3 и 2 раза соответственно, с учетом неизменности интенсивностей элементарных сигналов, соответствующих РЛИ одних и тех же объектов, формируются матрицы А'' и В'':


Масштаб матрицы С не изменяется. На этом происходит завершение первого этапа.
На втором этапе матрицы А'', В'' и С суммируют и получают сигнал, соответствующий результирующему РЛИ:

Далее результирующее РЛИ (8) отображается системой индикации. Таким образом, элементарному сигналу в каждой точке результирующего РЛИ ставится в соответствие сумма элементарных сигналов от соответствующих точек радиолокационных изображений, полученных на несущей частоте и на частотах второй и третьей гармоник ЗС.
Способ формирования радиолокационного изображения объектов может быть реализован с помощью устройства, структурная схема которого приведена на фиг.2.
Устройство состоит из широкополосной приемной антенны 1, устройства управления положением диаграммы направленности антенны 2, блока приемных трактов 3, состоящего из трех приемных трактов, блока фазового детектирования 4, состоящего из трех фазовых детекторов, блока вычислителей опорных функций 5, состоящего из трех вычислителей опорных функций, блока цифровых систем обработки 6, состоящего из трех цифровых систем обработки, устройства формирования результирующего радиолокационного изображения 7 и системы индикации 8, соединенных, как показано на фиг.2.
Широкополосная приемная антенна 1 предназначена для приема в течение временного интервала ТS сигналов, отраженных от объектов зондирования на несущей частоте, частотах второй и третьей гармоник ЗС и распределения их по трем каналам. Устройство управления положением диаграммы направленности антенны 2 обеспечивает при телескопическом обзоре совмещение максимума диаграммы направленности широкополосной приемной антенны 1 с центром заданной зоны обзора по азимуту ΔLZ в течение временного интервала TS. Блок приемных трактов 3 служит для выделения в первом, втором и третьем каналах сигналов, принятых на несущей частоте и на частотах второй и третьей гармоник ЗС соответственно, переноса сигналов в каждом из каналов на промежуточную частоту, а также их усиления. Блок фазового детектирования 4 осуществляет в каждом из каналов фазовое детектирование и выделяет квадратурные составляющие поступающих сигналов. Блок вычислителей опорных функций 5 формирует опорные функции для каждого из каналов. Блок цифровых систем обработки 6 реализует выполнение алгоритма синтезирования апертуры антенны [2, с.178-186] в каждом из каналов. Устройство формирования результирующего радиолокационного изображения 7 служит для получения сигнала, соответствующего результирующему РЛИ (8), с учетом результатов обработки сигналов, отраженных от объектов зондирования, в трех каналах на несущей частоте и на частотах второй и третьей гармоник ЗС соответственно. Это устройство может быть реализовано как с применением импульсных и цифровых схем [3-4], так и в виде программного модуля на ЭВМ при использовании программ MATHCAD [5] или MATLAB [6]. Система индикации 8 предназначена для отображения результирующего радиолокационного изображения.
Схема работает следующим образом. Сигналы, отраженные от объектов зондирования, на несущей частоте и на частотах второй и третьей гармоник ЗС соответственно:



где u(t), u2(t) и u3(t) - амплитуды на несущей частоте и на частотах второй и третьей гармоник ЗС; ω0 - несущая частота ЗС; λ - длина волны ЗС; θk - азимут k-го объекта относительно центра зоны обзора; ϕk(t), ϕ2k(t) и ϕ3k(t) - случайные фазы сигналов, принятых от k-го объекта зондирования на частоте ЗС и на частотах второй и третьей гармоник ЗС, в течение временного интервала TS поступают на широкополосную приемную антенну 1. При этом устройство управления положением диаграммы направленности антенны 2 обеспечивает отслеживание центра заданной зоны обзора максимумом диаграммы направленности широкополосной приемной антенны 1. Закон управления диаграммой направленности по азимуту имеет вид (1). Устройством управления положением диаграммы направленности антенны 2 может быть реализовано как механическое управление диаграммой направленности по азимуту (сканирование), так и электронное [7]. С выхода широкополосной приемной антенны 1 сигналы (9-11) распределяются на три выхода по числу каналов. Сигнал с первого выхода широкополосной приемной антенны 1 поступает на вход приемного тракта первого канала блока приемных трактов 3, где осуществляется выделение сигнала, принятого на несущей частоте ЗС, его перенос на промежуточную частоту и усиление. Сигналы со второго и третьего выходов широкополосной приемной антенны 1 поступают на первые входы приемных трактов второго и третьего каналов блока приемных трактов 3 соответственно. В приемных трактах второго и третьего каналов блока приемных трактов 3 осуществляется выделение сигналов, принятых на частотах второй и третьей гармоник ЗС соответственно, их перенос на промежуточную частоту и усиление. Далее сигналы с выходов приемных трактов первого, второго и третьего каналов блока приемных трактов 3 поступают на входы фазовых детекторов соответствующих каналов блока фазового детектирования 4, где осуществляется их фазовое детектирование и выделение двух квадратурных составляющих - синусной и косинусной на несущей частоте и на частотах второй и третьей гармоник ЗС соответственно:






При этом s(t)=sc(t)+jss(t), s2(t)=s2c(t)+js2s(t), s3(t)=s3c(t)+js3s(t). В вычислителях опорных функций первого, второго и третьего каналов блока вычислителей опорных функций 5 формируется своя опорная функция, состоящая из двух квадратурных составляющих - синусной и косинусной для сигналов (12-17), зарегистрированных в течение временного интервала ТS (траекторных сигналов) на несущей частоте и на частотах второй и третьей гармоник ЗС соответственно:






где W(t), W2(t) и W3(t) - действительные весовые функции, обеспечивающие требуемый уровень боковых лепестков импульсных откликов РЛС с СА на несущей частоте и на частотах второй и третьей гармоник ЗС соответственно. При этом опорные функции для траекторных сигналов на несущей частоте и на частотах второй и третьей гармоник ЗС будут иметь вид:



Квадратурные составляющие сигналов, полученные в блоке фазового детектирования 4, поступают: синусные - с первых выходов фазовых детекторов первого, второго и третьего каналов блока фазового детектирования 4 на первые входы цифровых систем обработки соответствующих каналов блока цифровых систем обработки 6, косинусные - со вторых выходов фазовых детекторов первого, второго и третьего каналов блока фазового детектирования 4 на третьи входы цифровых систем обработки соответствующих каналов блока цифровых систем обработки 6. Квадратурные составляющие опорных функций, сформированные в блоке вычислителей опорных функций 5, поступают: синусные - с первых выходов вычислителей опорных функций первого, второго и третьего каналов блока вычислителей опорных функций 5 на вторые входы цифровых систем обработки соответствующих каналов блока цифровых систем обработки 6, косинусные - со вторых выходов вычислителей опорных функций первого, второго и третьего каналов блока вычислителей опорных функций 5 на четвертые входы цифровых систем обработки соответствующих каналов блока цифровых систем обработки 6. Цифровые системы обработки первого, второго и третьего каналов блока цифровых систем обработки 6 реализуют выполнение алгоритма синтезирования апертуры антенны [2, с.178-186] на несущей частоте и на частотах второй и третьей гармоник ЗС соответственно:

Сигналы с выходов цифровых систем обработки первого, второго и третьего каналов блока цифровых систем обработки 6 поступают на соответствующие входы устройства формирования результирующего радиолокационного изображения 7, где осуществляется преобразование сигналов, поступающих с выходов цифровых систем обработки первого и второго каналов блока цифровых систем обработки 6, представленных в виде матриц А и В, в соответствующие сигналы, содержащие информацию только об объектах, расположенных внутри заданной зоны телескопического обзора ΔLZ=ΔL3, представленные матрицами А' и В', производится увеличение азимутального масштаба этих сигналов в 3 и 2 раза соответственно и получение тем самым сигналов, представленных матрицами А'' и В'', а также формируется сигнал, соответствующий результирующему РЛИ, путем суммирования сигналов, соответствующих РЛИ, полученных на несущей частоте и на частотах второй и третьей гармоник ЗС в виде матрицы I (8). Затем сформированный сигнал с выхода устройства формирования результирующего радиолокационного изображения 7 поступает на вход системы индикации 8, с помощью которой результирующее РЛИ отображается визуально.
Таким образом, предложенный способ формирования радиолокационного изображения объектов позволяет произвести отображение на РЛИ дополнительных элементов, соответствующих элементам объектов, обладающих нелинейными электрическими свойствами.
Оценим эффективность предложенного способа формирования радиолокационного изображения объектов. Известно [8, с.573-575], что одним из основных способов обнаружения объектов на изображении является сопоставление с эталоном. В качестве эталона используется РЛИ, сформированное предлагаемым способом для точечных объектов - устройств имитации радиолокационных целей (уголковых отражателей), размещенных произвольно на одной плоскости, находящейся на расстоянии 4 м от фазового центра широкополосной приемной антенны 1, имитирующих объекты с эффективной площадью рассеяния 0,3 м2 и 0,48 м2 соответственно и создающих на индикаторе эталонные отметки с яркостью 150 кд/м2 и 240 кд/м2 соответственно, а также для имитатора ОЭНС (СВЧ диода), размещенного произвольно в той же плоскости, имитирующего объект с нелинейной эффективной площадью рассеяния 0,64 м4/Вт и создающий на индикаторе эталонную отметку с яркостью 160 кд/м2. Результирующее РЛИ будет отображаться на индикаторе, который представляет собой матрицу, имеющую такой же размер, как и матрица I, то есть М строк и N столбцов. При этом отображаемым радиолокационным изображением будет совокупность отметок различной яркости, создаваемых элементами матрицы индикатора - пикселями. Задача состоит в том, чтобы оценить степень повышения информативности РЛИ, формируемого при реализации предлагаемого способа, по сравнению с прототипом. При проведении оценки эталон последовательно перемещается по полю радиолокационного изображения и исследуется его сходство с различными участками изображения. Мерой различия между эталоном и РЛИ является нормированная взаимная корреляционная функция РЛИ и эталонного изображения:
где  номер строки матрицы индикатора;
номер строки матрицы индикатора;  номер столбца матрицы индикатора; F(x,y) - яркость отметки на индикаторе, соответствующей элементу результирующего РЛИ; Е(x,y) - яркость отметки на индикаторе, соответствующая эталонному элементу. Полное совпадение значений F(x,y) и Е(x,y) бывает редко из-за искажений РЛИ, обусловленных аппаратурными нестабильностями и воздействием различных шумов. В результате таких искажений снижается яркость отметок на индикаторе при отображении РЛИ. Допустим, что в результате воздействия на РЛС вышеупомянутых негативных факторов в процессе формирования реального РЛИ тех же объектов, которые использовались при формировании эталонного РЛИ, на экране индикатора создаются отметки: яркостью 137 кд/м2 и 224 кд/м2 - от устройств имитации радиолокационных целей (уголковых отражателей), 149 кд/м2 - от имитатора ОЭНС (СВЧ диода). Тогда расчет, проведенный при заданных условиях, показывает, что для РЛИ, сформированного прототипом,
номер столбца матрицы индикатора; F(x,y) - яркость отметки на индикаторе, соответствующей элементу результирующего РЛИ; Е(x,y) - яркость отметки на индикаторе, соответствующая эталонному элементу. Полное совпадение значений F(x,y) и Е(x,y) бывает редко из-за искажений РЛИ, обусловленных аппаратурными нестабильностями и воздействием различных шумов. В результате таких искажений снижается яркость отметок на индикаторе при отображении РЛИ. Допустим, что в результате воздействия на РЛС вышеупомянутых негативных факторов в процессе формирования реального РЛИ тех же объектов, которые использовались при формировании эталонного РЛИ, на экране индикатора создаются отметки: яркостью 137 кд/м2 и 224 кд/м2 - от устройств имитации радиолокационных целей (уголковых отражателей), 149 кд/м2 - от имитатора ОЭНС (СВЧ диода). Тогда расчет, проведенный при заданных условиях, показывает, что для РЛИ, сформированного прототипом,

в то время как при реализации предлагаемого способа формирования радиолокационного изображения объектов

Отсюда следует, что реализация предложенного способа формирования радиолокационного изображения объектов обеспечивает увеличение значения нормированной взаимной корреляционной функции формируемого радиолокационного изображения и эталонного изображения (в рассмотренном случае на 32%), что способствует повышению информативности РЛИ, формируемого РЛС с СА антенны.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ формирования РЛИ объектов, основанный на реализации в РЛС алгоритма синтезирования апертуры антенны, в котором дополнительно задают зону ТО по азимуту, равную зоне телескопического обзора РЛС по азимуту на частоте третьей гармоники ЗС, совмещают максимум диаграммы направленности широкополосной приемной антенны с центром заданной зоны ТО, в течение временного интервала СА антенны формируют сигналы, соответствующие РЛИ на частотах второй и третьей гармоник ЗС аналогично процессу создания сигнала, соответствующего РЛИ на несущей частоте ЗС, преобразуют полученные сигналы к единому виду и формируют сигнал, соответствующий результирующему РЛИ, путем суммирования сигналов, соответствующих РЛИ, сформированных на несущей частоте и на частотах второй и третьей гармоник ЗС.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных [2, 9-14] и известных технических решений явным образом не следует, что заявленный способ формирования радиолокационного изображения объектов способствует повышению информативности РЛИ объектов, формируемого РЛС с СА антенны.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы типовые радиотехнические узлы и устройства, применяемые в РЛС с СА [2-4, 13-14], а также оборудование и материалы СВЧ диапазона широко распространенной технологии [7, 15].
Источники информации
1. Нелинейный локатор «Люкс». Техническое описание и инструкция по эксплуатации. - М.: Новоком, 2005.
2. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. - М.: Радиотехника, 2005.
3. Лебедев О.Н., Сидоров А.М. Импульсные и цифровые устройства: Цифровые узлы и их проектирование на микросхемах. - Л.: ВАС, 1980.
4. Гольденберг Л.М. Импульсные и цифровые устройства: Учебник для институтов связи. - М.: Связь, 1973.
5. Дьяконов В.П. MATHCAD 8/2000: Специальный справочник. - СПб.: Питер, 2001.
6. Потемкин В.Г. Система MATLAB. Справочное пособие. - М.: Диалог-МИФИ, 1997.
7. Справочник по радиолокации. / Под ред. М.Сколника, Нью-Йорк, 1970: Пер. с англ. (в четырех томах). / Под общей ред. К.И.Трофимова; Том 2. Радиолокационные антенные устройства. - М.: Сов. радио, 1979.
8. Прэтт У.К. Цифровая обработка изображений: Пер. с англ. - М.: Мир, 1982. - Кн.2.
9. Теоретические основы радиолокации. / Под ред. Ширмана Я.Д. - М.: Сов. радио, 1970.
10. Горбачев А.А., Колданов А.П., Ларцов С. В., Тараканков С.П., Чигин Е.П. Признаки распознавания нелинейных рассеивателей электромагнитных волн // Нелинейная радиолокация. Сборник статей. Часть 1 / Под ред. Горбачева А.А., Колданова А.П., Потапова А.А., Чигина Е.П. - М.: Радиотехника, 2005. - С.301-309.
11. Семенов Д.В., Ткачев Д.В. Нелинейная радиолокация: концепция NR // Специальная техника. / НИИ специальной техники МВД России. - 1999. - №1-2. - С.17-22.
12. Горбачев А.А., Данилов В.И., Чигин Е.П., Васенков А.А. Обнаружение нелинейных рассеивателей при проведении поисковых работ // Радиотехника и электроника. - 1996. - Т.41, №8. - С.864-882.
13. Кондратенков Г.С., Потехин В.А., Реутов А.П., Феоктистов Ю.А. Радиолокационные станции обзора Земли. / Под ред. Г.С.Кондратенкова. - М.: Радио и связь, 1983.
14. Антипов В.Н., Горяинов В.Т., Кулин А.Н. и др. Радиолокационные станции с цифровым синтезированием апертуры антенны. / Под ред. В.Т. Горяинова. - М.: Радио и связь, 1988.
15. Дулин В.Н. Электронные и квантовые приборы СВЧ: Учебное пособие для студентов высших технических учебных заведений. Издание 2-е, переработанное. - М.: Энергия, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347239C1 |
| НЕЛИНЕЙНАЯ РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2008 |
|
RU2386979C2 |
| НЕЛИНЕЙНАЯ РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2008 |
|
RU2397509C2 |
| СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ЦЕЛИ С НЕЛИНЕЙНЫМИ ЭЛЕКТРИЧЕСКИМИ СВОЙСТВАМИ | 2011 |
|
RU2507534C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ Ku-ДИАПАЗОНА | 2021 |
|
RU2787574C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2022 |
|
RU2801361C1 |
| Гомодинный радиолокатор со сканированием диаграммы направленности антенны | 2018 |
|
RU2702190C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ И ИНВЕРСНОМ СИНТЕЗЕ АПЕРТУРЫ С ОПРЕДЕЛЕНИЕМ ТРЕТЬЕЙ КООРДИНАТЫ ЭЛЕМЕНТОВ ФОРМИРУЕМОГО ИЗОБРАЖЕНИЯ | 2019 |
|
RU2723706C1 |

Изобретение относится к радиолокации. Достигаемый технический результат - повышение информативности радиолокационного изображения объектов. Указанный результат достигается за счет того, что в способе, основанном на использовании в радиолокационной станции (РЛС) алгоритма синтезирования апертуры, дополнительно задают зону телескопического обзора по азимуту, равную зоне телескопического обзора РЛС по азимуту на частоте третьей гармоники зондирующего сигнала, совмещают максимум диаграммы направленности приемной антенны с центром заданной зоны телескопического обзора, в течение временного интервала синтезирования апертуры антенны формируют сигналы, соответствующие изображениям на частотах второй и третьей гармоник зондирующего сигнала, аналогично процессу создания сигнала, соответствующего радиолокационному изображению на несущей частоте зондирующего сигнала, и формируют сигнал, соответствующий результирующему радиолокационному изображению, путем суммирования сигналов, соответствующих радиолокационным изображениям, сформированным на несущей частоте и на частоте второй и третьей гармоник зондирующего сигнала. 2 ил.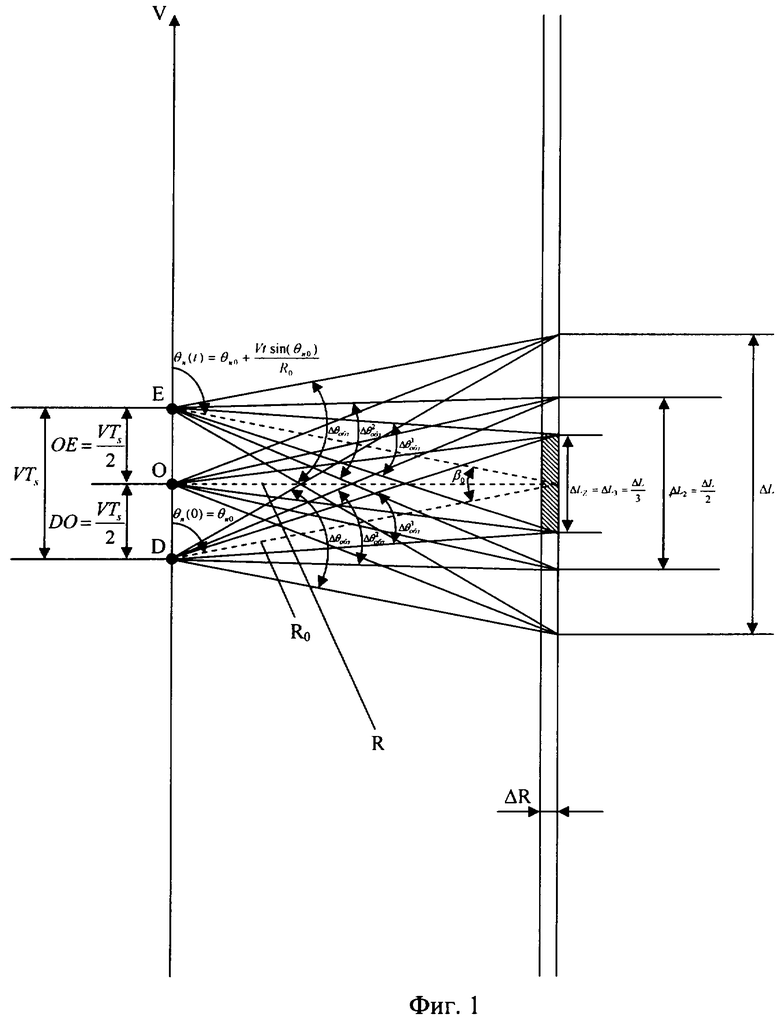
Способ формирования радиолокационного изображения объектов, основанный на реализации в радиолокационной станции (РЛС) алгоритма синтезирования апертуры антенны, отличающийся тем, что дополнительно задают зону телескопического обзора по азимуту, равную зоне телескопического обзора РЛС по азимуту на частоте третьей гармоники зондирующего сигнала, совмещают максимум диаграммы направленности широкополосной приемной антенны с центром заданной зоны телескопического обзора, в течение временного интервала синтезирования апертуры антенны формируют сигналы, соответствующие радиолокационным изображениям на частотах второй и третьей гармоник зондирующего сигнала аналогично процессу создания сигнала, соответствующего радиолокационному изображению на несущей частоте зондирующего сигнала, преобразуют полученные сигналы к единому виду и формируют сигнал, соответствующий результирующему радиолокационному изображению, путем суммирования сигналов, соответствующих радиолокационным изображениям, сформированных на несущей частоте и на частотах второй и третьей гармоник зондирующего сигнала.
| КОНДРАТЕНКОВ Г.С., ФРОЛОВ А.Ю | |||
| Радиовидение | |||
| Радиолокационные системы дистанционного зондирования Земли | |||
| - М.: Радиотехника, 2005, с.178-186 | |||
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 1998 |
|
RU2143708C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ И ПОВЕРХНОСТЬЮ НА БАЗЕ БОРТОВОЙ РЛС | 2005 |
|
RU2292060C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| US 6166677 А, 26.12.2000 | |||
| US 2006279451 A1, 14.12.2006 | |||
| Устройство для укладки досок в пакет | 1989 |
|
SU1728104A1 |

