Изобретение относится к области локации, преимущественно к комбинированным способам обнаружения подвижных объектов, например беспилотных летательных аппаратов, особенно при неблагоприятных метеоусловиях.
Известен способ обнаружения объекта [US, патент, 3336585, кл. 340-258, 1975], заключающийся в формировании изображения объекта и фона на фоточувствительной площадке передающей телевизионной камеры, регистрации изображений объекта и фона в положительной и отрицательной полярности, считывании результирующего зарегистрированного изображения и выделения изображения объекта как отличной от нуля области результирующего изображения.
К недостаткам известного способа относится низкая точность обнаружения объекта, обусловленная невозможностью селекции движущегося объекта от изменяющейся части фона, и невозможность выделения неискаженного изображения обнаруживаемого объекта.
Наиболее близок к изобретению и выбран за прототип способ обнаружения подвижного объекта [RU, патент, 2081436, кл. G01S 17/00, 1997], заключающийся в регистрации в различные моменты первого, второго и третьего изображений объекта и фона, формировании первого и второго разностных изображений путем вычитания первого и второго, второго и третьего зарегистрированных изображений соответственно, выделении первого, второго и третьего изображений, выделении изображения объекта в виде общей ненулевой области первого и второго преобразованных разностных изображений.
К недостаткам этого способа относится низкая точность обнаружения объекта, особенно при неблагоприятных метеоусловиях, его работоспособность при малых τ скоростях перемещения объекта и невозможность определения его текущих координат.
Целью изобретения является повышение точности обнаружения, определения дальности до объекта и его текущих координат.
Поставленная цель достигается тем, что в известном способе обнаружения подвижного объекта, заключающемся в приеме излучения от объекта, регистрации в системе наблюдения первого и второго изображений объекта в моменты времени τ1 и τ2, формировании из них первого разностного изображения, селекции объекта по первому разностному изображению, дополнительной регистрации третьего изображения объекта в момент времени τ3, причем τ3>τ1, τ2, определяют центр первого разностного изображения объекта, дополнительно регистрируют четвертое изображение объекта в момент времени τ4, причем τ4>τ3, формируют из третьего и четвертого изображений объекта второе разностное изображение, селектируют объект по второму разностному изображению, определяют центр второго разностного изображения объекта, фиксируют в системе наблюдения данные о горизонтальных и вертикальных углах визирования центров первого и второго разностных изображений объекта, о скорости и путевом угле объекта, причем значения скорости и путевого угла объекта в указанные моменты времени определяются в его системе управления по команде системы наблюдения и передаются в систему наблюдения по дуплексному радиоканалу, вычисляют расстояние между центрами первого и второго разностных изображений объекта и вычисляют дальности до объекта путем вычисления параметров треугольника, образованного центром системы наблюдения и центрами первого и второго разностных изображений объекта и вычисляют координаты объекта в системе координат системы наблюдения.
Система наблюдения может быть установлена и на другом подвижном объекте.
Вследствие того, что одной из характерных особенностей предложенного способа является возможность определения расстояния между центрами первого и второго разностных изображений, т.е. пути, пройденного подвижным объектом за время измерения, обеспечивается возможность вычисления наклонных дальностей в двух точках, что позволяет определить текущие координаты подвижного объекта и существенно повысить точность его обнаружения.
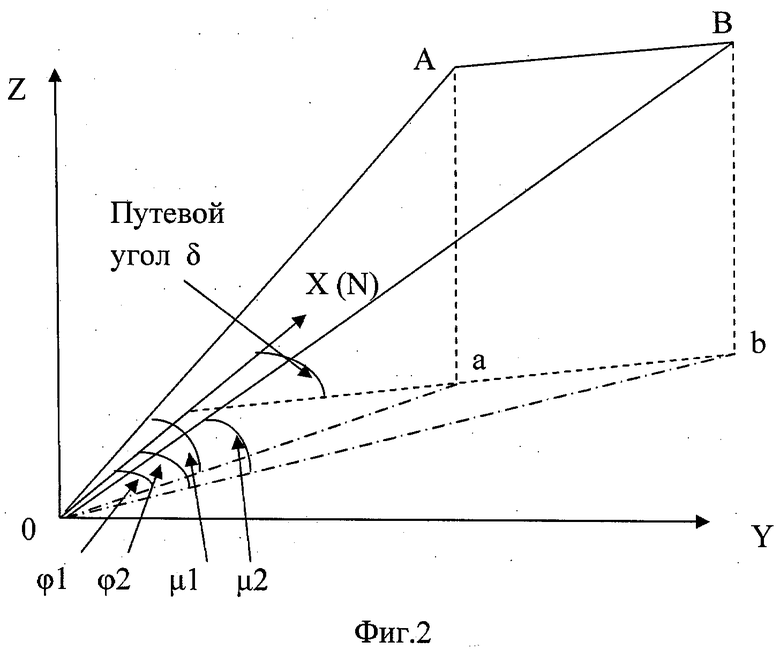
Пример блок-схемы устройства (системы наблюдения), реализующего предлагаемый способ, приведен на фиг.1, где введены следующие обозначения:
1 - телевизионная камера с приемной ПЗС - матрицей;
2 - блок памяти;
3 - блок вычитания изображений;
4 - блок определения центров разностных изображений;
5 - вычислитель;
6 - приемопередатчик системы наблюдения;
7 - блок синхронизации и коммутации;
8 - блок индикации;
9 - блок управления.
Изображение объекта проецируется на приемную ПЗС - матрицу телевизионной камеры 1, в моменты времени τ1, τ2, τ3 и τ4 изображения записываются в регистры блока памяти 2, в блоке вычитания изображений 3 формируются первое и второе разностные изображения, в блоке 4 определяются центры первого и второго разностных изображений, по этим данным в вычислителе 5 производится определение горизонтальных и вертикальных углов визирования центров первого и второго разностных изображений, по командам вычислителя 5 посредством приемопередатчика 6 производится запрос в систему управления подвижного объекта и передача в систему наблюдения данных о скорости и путевых углах подвижного объекта в указанные выше моменты времени. На основании полученных данных в вычислителе 5 по заложенной в него программе производится определение наклонных дальностей до подвижного объекта путем вычисления параметров треугольника, образованного центром системы наблюдения и центрами первого и второго разностных изображений подвижного объекта, и вычисление координат подвижного объекта в системе координат системы наблюдения. Информация о результатах траекторных измерений может быть выведена на блок индикации 8 (например, на видеоконтрольное устройство). Блок синхронизации и коммутации 7 формирует команды, определяющие необходимую временную последовательность работы отдельных блоков системы. Блок управления 9 служит для оперативной корректировки программы работы системы наблюдения, а также для изменения при необходимости полетного задания для подвижного объекта.
На фиг.2 графически показан пример взаимного расположения центров первого и второго разностных изображений подвижного объекта (точки А и В), проекций центров разностных изображений объектов на горизонтальную плоскость (точки а и b), углов визирования центров разностных изображений объектов в горизонтальной плоскости (углы φ1 и φ2), углов визирования центров разностных изображений объектов в вертикальной плоскости (углы µ1 и µ2), путевой угол δ (угол между направлением движения подвижного объекта и направлением на север) в земной системе координат, совпадающей с системой координат неподвижной системы наблюдения.
Исходя из знания величины скорости подвижного объекта и времени, затраченного на прохождение пути между точками А и В и указанных выше углов, определяют расстояние между точками А и В, угол при вершине 0 треугольника А0В и по теореме синусов определяют наклонные дальности А0 и В0 и координаты точек А и В в земной системе координат.
В случае размещения системы наблюдения на другом подвижном объекте (например, на пилотируемом или беспилотном летательном аппарате) координаты подвижного объекта определяют в связанной системе координат с последующим пересчетом при необходимости в земную систему координат.
Источники
1. US, патент, 3336585, кл. 340-258, 1975.
2. RU, патент, 2081436, кл. G01S 17/00, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА | 1984 |
|
RU2081436C1 |
| СПОСОБ ЧАСТОТНО-ВРЕМЕННОЙ ОБРАБОТКИ СИГНАЛОВ ОТ НЕСКОЛЬКИХ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2023 |
|
RU2824754C1 |
| СПОСОБ ЧАСТОТНО-ВРЕМЕННОЙ ОБРАБОТКИ СИГНАЛОВ | 2023 |
|
RU2809744C1 |
| СПОСОБ АКУСТИЧЕСКОГО ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА И ПОТОКА ЖИДКОСТИ ИЛИ ГАЗА ПРИ ИЗМЕНЕНИИ ОКРУЖАЮЩЕЙ ТЕМПЕРАТУРЫ | 2022 |
|
RU2801203C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда и комплексированная система для его реализации | 2021 |
|
RU2770951C1 |
| СИСТЕМА ОРИЕНТАЦИИ НАВИГАЦИОННОГО СПУТНИКА | 2012 |
|
RU2535979C2 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
| Способ одновременного измерения вектора скорости летательного аппарата и дальности до наземного объекта | 2016 |
|
RU2658115C2 |
| ЗОНД АТОМНО-СИЛОВОГО МИКРОСКОПА С ПРОГРАММИРУЕМОЙ ДИНАМИКОЙ ИЗМЕНЕНИЯ СПЕКТРАЛЬНЫХ ПОРТРЕТОВ ИЗЛУЧАЮЩЕГО ЭЛЕМЕНТА НА ОСНОВЕ КВАНТОВЫХ ТОЧЕК СТРУКТУРЫ ЯДРО-ОБОЛОЧКА | 2017 |
|
RU2650702C1 |
| Способ определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса и устройство для его осуществления | 2020 |
|
RU2757197C1 |
Изобретение относится к области локации, преимущественно к комбинированным способам обнаружения подвижных объектов, например беспилотных летательных аппаратов, особенно при неблагоприятных метеоусловиях. Согласно способу регистрируют в различные моменты времени первого, второго, третьего и четвертого изображений подвижного объекта. Получают два разностных изображения подвижного объекта и определяют центры разностных изображений подвижного объекта. Производят определение вертикальных и горизонтальных углов визирования центров разностных изображений подвижного объекта. Производят считывание информации о скорости и путевом угле из системы управления подвижного объекта в моменты регистрации изображений. На основании полученных данных определяют наклонные дальности и координаты подвижного объекта в системе координат системы наблюдения. Система наблюдения может быть установлена на другом подвижном объекте. Технический результат - повышение точности обнаружения, определение дальности до подвижного объекта и его текущих координат. 1 з.п. ф-лы, 2 ил.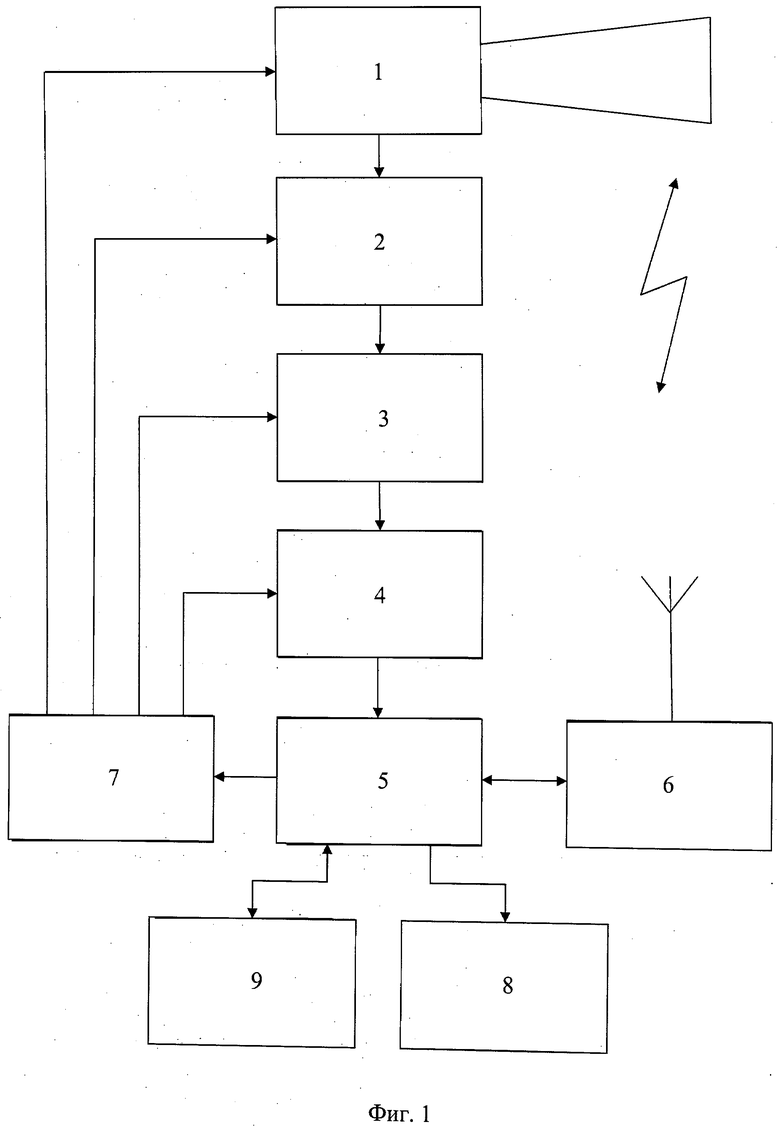
1. Способ обнаружения подвижного объекта, заключающийся в приеме излучения от подвижного объекта, регистрации в системе наблюдения первого и второго изображений подвижного объекта в моменты времени τ1 и τ2, формировании из них первого разностного изображения, селекции подвижного объекта по первому разностному изображению, дополнительной регистрации третьего изображения подвижного объекта в момент времени τ3, причем τ3>τ1, τ2, отличающийся тем, что определяют центр первого разностного изображения подвижного объекта, дополнительно регистрируют четвертое изображение подвижного объекта в момент времени τ4, причем τ4>τ3, формируют из третьего и четвертого изображений подвижного объекта второе разностное изображение, селектируют подвижный объект по второму разностному изображению, определяют центр второго разностного изображения подвижного объекта, фиксируют в системе наблюдения данные о горизонтальных и вертикальных углах визирования центров первого и второго разностных изображений подвижного объекта, о скорости и путевом угле подвижного объекта, причем значения скорости и путевого угла подвижного объекта в указанные моменты времени определяются в его системе управления по команде системы наблюдения и передаются в систему наблюдения по дуплексному радиоканалу, вычисляют расстояние между центрами первого и второго разностных изображений подвижного объекта и вычисляют наклонные дальности до подвижного объекта путем вычисления параметров треугольника, образованного центром системы наблюдения и центрами первого и второго разностных изображений подвижного объекта и вычисляют координаты подвижного объекта в системе координат системы наблюдения.
2. Способ обнаружения подвижного объекта по п.1, отличающийся тем, что система наблюдения установлена на другом подвижном объекте.
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА | 1984 |
|
RU2081436C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА | 1986 |
|
RU2107929C1 |
| US 7295684 B2, 13.11.2007 | |||
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2008 |
|
RU2383902C2 |

