Изобретение относится к системам пеленгации движущихся воздушных объектов [1], в которых осуществляется обработка радиосигналов в приемопередающей станции, излучающей гармонический сигнал и принимающей отраженный сигнал в одном периоде зондирования. Под периодом зондирования понимается короткий промежуток времени излучения и приема отраженного сигнал, соответствующий заданному диапазону дальности. Если в пространственном элементе, ограниченном диаграммой направленности антенны (ДНА) и указанным диапазоном дальности, находятся движущиеся объекты, то на фоне шума приходит суммарный сигнал отражения от объектов, гармонические составляющие которого имеют доплеровский сдвиг частоты, зависящий от проекций векторов скоростей объектов на линию визирования антенны (биссектрису ДНА).
Если несколько объектов движутся в пределах ширины ДНА с близкими векторами скорости, то это затрудняет их разрешение по доплеровской частоте. Возникает задача определения числа объектов и оценивания их угловых координат при низком разрешении по доплеровской частоте за время одного периода наблюдения. Ограничение на один период зондирования необходимо для работы в сложных условиях пеленгации.
Известен способ [2] обработки сигналов в частотной и временной областях, позволяющий оценить число объектов во временной области по задержке времени прихода отраженных сигналов, а также оценить число объектов и их координаты в частотной области по выделенным частотным составляющим в спектре доплеровских частот. Рассмотрим данный способ в качестве прототипа. Способ сводится к следующим операциям.
1. Приемопередающая станция посылает зондирующий гармонический сигнал определенной длительности τ с периодом повторения Т и принимает отраженные сигналы в элементах антенной решетки на промежутке времени длительностью Δτ, соответствующей определенному элементу радиальной дальности (τ<Δτ<T).
2. Принятые сигналы от нескольких объектов за время Δτ преобразуют во временные последовательности в нескольких приемных каналах первичной обработки.
3. Временные последовательности подвергают фильтрации и обнаруживают моменты времени "разладки" - несоответствия между фильтрованными экстраполированными значениями сигнала и текущими элементами последовательности, после чего запоминают число таких моментов времени, которое по истечении времени Δτ принимают за число обнаруженных объектов во временной области.
4. Далее временные последовательности переводят в частотные последовательности в спектре доплеровских частот и обнаруживают частоты, на которых амплитуды спектральных составляющих превышают порог обнаружения во всех приемных каналах, затем методом разности фаз выбранных спектральных составляющих находят угловые координаты объектов.
5. Сравнивают число обнаруженных частот с числом обнаруженных моментов времени и, если число частот не меньше числа обнаруженных моментов времени, то это число принимают за оценку числа объектов и найденные координаты передают, в противном случае повторяют все операции для других элементов дальности в последовательности периодов зондирования.
Данный способ обладает следующими недостатками.
1. Повторение операций в последовательности периодов зондирования приводит к увеличению времени работы передающей станции на излучение сигналов, что нежелательно в сложных условиях пеленгации.
2. Для объектов, движущихся с близкими скоростями и слабо разрешенных по доплеровской частоте, повторение операций в других периодах не приводит к увеличению разрешения по доплеровской частоте и, следовательно, повышению вероятности обнаружения всех объектов и точности определения их угловых координат.
Техническое решение направлено на устранение этих недостатков, а именно на выполнение операций обнаружения и определения угловых координат объектов в одном периоде зондирования, а также повышение вероятности обнаружения всех объектов и точности определения их угловых координат за счет дополнительной обработки во временной области.
Технический результат предлагаемого технического решения достигается применением способа частотно-временной обработки сигналов от нескольких движущихся объектов, который заключается в передаче и приеме гармонического сигнала в одном периоде зондирования, преобразовании принятого сигнала в нескольких приемных каналах во временные последовательности, фильтрации последовательностей с обнаружением моментов времени "разладки" - несоответствия фильтрованных и экстраполированных значений сигналов элементам последовательностей, переводе временных последовательностей в частотные последовательности в спектре доплеровских частот, обнаружении частот, на которых амплитуды спектральных составляющих превышает порог обнаружения во всех приемных каналах, нахождении угловых координат объектов по разности фаз выбранных спектральных составляющих, отличающийся тем, что при обнаружении первого момента времени "разладки" подсчитывают число полупериодов фильтрованных последовательностей в приемных каналах и на их основе определяют оценку частоты сигнала от первого объекта, затем с помощью фильтра Калмана находят оценки амплитуд и фаз сигналов от первого объекта в каналах и методов разности фаз определяют угловые координаты первого объекта, после чего при обнаружении второго момента времени "разладки" по истечении времени переходного процесса из фильтрованных последовательностей входного сигнала в каналах вычитают экстраполированные значения сигналов от первого объекта и получают оценки сигналов от второго объекта, после чего с помощью фильтра Калмана находят оценки амплитуд и фаз сигналов от второго объекта и методов разности фаз определяют угловых координаты второго объекта, далее обнаруживают третий момента времени "разладки" и по истечении времени переходного процесса из фильтрованных последовательностей входного сигнала в каналах вычитают экстраполированные значения сигналов от первого и второго объектов, находят оценки амплитуд и фаз сигналов от третьего объекта и определяют угловые координаты третьего объекта, затем повторяют операции до окончания периода зондирования и, если число объектов, найденных во временной области, больше числа объектов, найденных в частотной области, передают оценки угловых координат, найденные во временной области, в противном случае передают оценки угловых координат, найденные в частотной области. Алгоритмически способ заключается в следующем.
1. Приемопередающая станция посылает зондирующий гармонический сигнал определенной длительности τ на периоде длительностью Т, принимает в элементах антенной решетки отраженные сигналы на промежутке времени длительностью Δτ, соответствующей элементу радиальной дальности (τ<"Δτ<Т), и преобразует принятые непрерывные сигналы в нескольких приемных каналах в последовательности дискретных значений сигналов.
2. На начальном промежутке времени [t0,τ1), предшествующем моменту времени τ1 появления сигнала от первого источника, в q-x приемных каналах ( Q - число каналов) действует дискретный белый шум: yq(ti)=pq(ti), i=1,2,…, с нулевым средним и дисперсией
Q - число каналов) действует дискретный белый шум: yq(ti)=pq(ti), i=1,2,…, с нулевым средним и дисперсией  . Последовательности входных сигналов {yq(ti)},
. Последовательности входных сигналов {yq(ti)},  подают на вход одноступенчатого экспоненциального фильтра нулевого порядка, который оценивает среднее значение шумового сигнала, и по факту превышения сигналом порога, устанавливаемого с учетом
подают на вход одноступенчатого экспоненциального фильтра нулевого порядка, который оценивает среднее значение шумового сигнала, и по факту превышения сигналом порога, устанавливаемого с учетом  , обнаруживают момент времени τ, появления сигналов sq1(ti-τ1),
, обнаруживают момент времени τ, появления сигналов sq1(ti-τ1), ti≥τ1, от первого объекта в Q каналах.
ti≥τ1, от первого объекта в Q каналах.
3. После принятия решения о наличии сигналов sq1(ti-τ1),  от первого объекта, начиная с момента τ1, включается в работу трехступенчатый экспоненциальный фильтр, непрерывно сглаживающий последовательности yq(ti) по параболической модели в пределах эффективной памяти фильтра в каждом q-м канале с целью подавления шумов pq(ti). Получают сглаженные дискретные сигналы
от первого объекта, начиная с момента τ1, включается в работу трехступенчатый экспоненциальный фильтр, непрерывно сглаживающий последовательности yq(ti) по параболической модели в пределах эффективной памяти фильтра в каждом q-м канале с целью подавления шумов pq(ti). Получают сглаженные дискретные сигналы  ti≥τ1, где
ti≥τ1, где  - ошибка сглаживания. По сглаженным значениям
- ошибка сглаживания. По сглаженным значениям  находят оценки полупериодов сигналов в Q каналах и по совокупности этих оценок определяют медианную оценку частоты
находят оценки полупериодов сигналов в Q каналах и по совокупности этих оценок определяют медианную оценку частоты  Одновременно вычисляют остаточные ряды
Одновременно вычисляют остаточные ряды

Остаточные ряды обрабатывают одноступенчатым экспоненциальным фильтром для обнаружения момента времени "разладки" τ2 - момента появления второго сигнала.
4. Запомненные последовательности значений сглаженных сигналов  τ1<ti<τ2, повторно обрабатывают фильтром Калмана, настроенным на модель сигнала вида
τ1<ti<τ2, повторно обрабатывают фильтром Калмана, настроенным на модель сигнала вида

где  - найденная оценка частоты,
- найденная оценка частоты,  - случайная величина, и настроенным на модель измерения
- случайная величина, и настроенным на модель измерения

где  Xi=(aq1(ti), bq1(ti))T - вектор состояния, подчиненный уравнению
Xi=(aq1(ti), bq1(ti))T - вектор состояния, подчиненный уравнению 
Фильтр Калмана последовательно во времени ti находит оценку вектора состояния  и на основе оценок параметров
и на основе оценок параметров  вычисляют оценки фаз в q-x каналах до момента времени прихода второго сигнала:
вычисляют оценки фаз в q-x каналах до момента времени прихода второго сигнала:

или с учетом π в зависимости от знаков 
Затем методом разности фаз  определяют оценки угловых координат
определяют оценки угловых координат  первого объекта.
первого объекта.
5. По остаточному ряду eq1(ti), ti>τ1, обнаруживают момент времени "разладки" τ2 и принимают решение о наличии сигналов sq2(ti-τ2),  от второго источника в q-x каналах. Начиная с момента времени τ2-h1, где h1 учитывает возможное опережение сигнала в отдельных каналах, формируют и запоминают последовательности значений экстраполированных оценок сигналов от первого объекта
от второго источника в q-x каналах. Начиная с момента времени τ2-h1, где h1 учитывает возможное опережение сигнала в отдельных каналах, формируют и запоминают последовательности значений экстраполированных оценок сигналов от первого объекта

6. По истечении времени h переходного процесса, начиная с момента τ2+h, производят вычитание из сглаженных последовательностей входных сигналов  оценок сигнала от первого источника, и разностный сигнал принимается за оценку сигнала sq2(ti-τ2)от второго объекта:
оценок сигнала от первого источника, и разностный сигнал принимается за оценку сигнала sq2(ti-τ2)от второго объекта:


где εq1(ti) - ошибка калмановского оценивания.
7. Подсчитывают число полупериодов оценок сигналов 
 и находят медианную оценку частоты
и находят медианную оценку частоты  Запомненные последовательности оценок
Запомненные последовательности оценок  обрабатывают фильтром Калмана на основе модели
обрабатывают фильтром Калмана на основе модели  и методом разности фаз находят оценки угловых координат
и методом разности фаз находят оценки угловых координат  второго объекта.
второго объекта.
8. Продолжают сглаживание yq(ti) при ti≥τ2 трехступенчатым фильтром, в результате получают сглаженные последовательности q-x сигналов

Одновременно вычисляют остаточные ряды

которые обрабатывают одноступенчатым экспоненциальным фильтром для обнаружения нового момента времени "разладки" τ3 - момента появления третьего сигнала.
С момента времени τ3 повторяют операции пп. 1-8, выделяют сигналы  вычисляют и запоминают оценки координат
вычисляют и запоминают оценки координат  и т.д.
и т.д.
За время Т до момента времени прихода переотраженного сигнала, который обнаруживают по сильному искажению входного сигнала, находят оценку числа объектов  как число моментов времени
как число моментов времени  и запоминают оценки угловых координат
и запоминают оценки угловых координат 
9. Последовательности yq(ti),  запомненные на промежутке времени наблюдения длительностью Т, подвергают дискретному преобразованию Фурье. В результате в полосе доплеровских частот образуют спектры в виде комплексных последовательностей
запомненные на промежутке времени наблюдения длительностью Т, подвергают дискретному преобразованию Фурье. В результате в полосе доплеровских частот образуют спектры в виде комплексных последовательностей 
10. Выделяют спектральные составляющие на  частотах, на которых амплитуды
частотах, на которых амплитуды  превышают порог обнаружения во всех Q каналах, и методом разности фаз
превышают порог обнаружения во всех Q каналах, и методом разности фаз  взятых на выделенных частотах, находят оценки угловых координат объектов
взятых на выделенных частотах, находят оценки угловых координат объектов  где
где  - оценка числа источников, обнаруженных в частотной области.
- оценка числа источников, обнаруженных в частотной области.
11. Результатом обработки являются оценки  найденные во временной области, и оценки
найденные во временной области, и оценки  найденные в частотной области.
найденные в частотной области.
12. Если  то берутся оценки, найденные в частотной области. Если
то берутся оценки, найденные в частотной области. Если  то берутся оценки, найденные во временной области.
то берутся оценки, найденные во временной области.
Замечание. В случае  предусмотрена идентификация оценок
предусмотрена идентификация оценок  на предмет их соответствия оценкам
на предмет их соответствия оценкам 
Результаты моделирования
Компьютерное моделирование проводилось для трех подходов: обработка сигналов только в частотной области, только во временной области и совместная обработка в частотно-временной области в соответствии с предложенным способом. Приемопередающая станция посылала непрерывный сигнал в сантиметровом диапазоне длин волн. Слежение за объектами осуществлялось в пределах узкой круговой ДНА в 2°. Принимаемые в антенной решетке сигналы после декодера и режекторного фильтра переводились на низкую частоту и моделировались с шагом дискретизации Δt=1/(8ƒп), где ƒп=10 кГц.
Рассматривалось движение трех объектов. Скорость первого объекта выбиралась постоянной величиной ν1=10 м/с, а второго и третьего - на промежутке от 10 до 11 м/с. Сигналы от источников приходили на интервале времени длительностью 40 мс с временем задержки 10 мс относительно друг друга. Считалось, что угловое положение объектов оценивалось правильно, если найденные объекты не выходили за пределы ширины ДНА, а ошибки измерения каждой угловой координаты не превышали 1°.
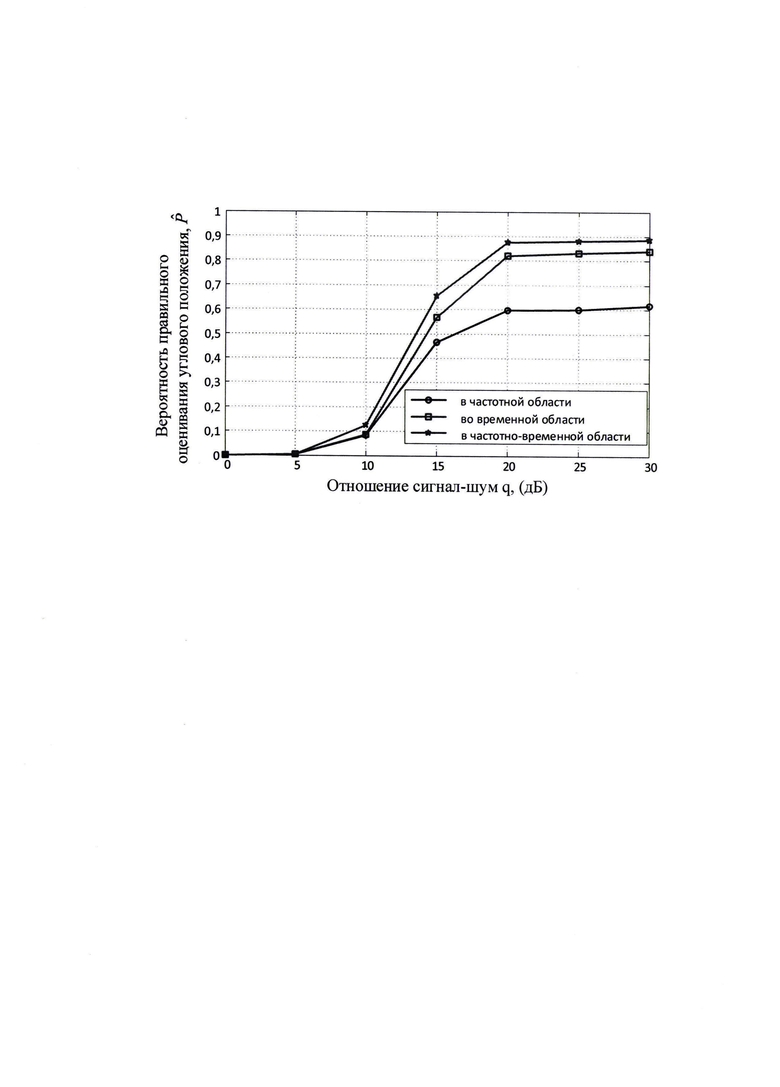
На чертеже показаны зависимости оценок вероятности правильного определения положения трех объектов от отношения сигнал-шум.
Чертеж
По результатам компьютерного моделирования алгоритма, реализующего предложенный способ частотно-временной обработки сигналов в одном периоде наблюдения, оценка вероятности правильного определения положения трех объектов, движущихся с близкими скоростями, при отношении сигнал-шум 20-30 дБ повысилась с 0,6 до 0,9 по сравнению с алгоритмом, реализующим в одинаковых условиях моделирования способ-прототип обработки сигналов в одной частотной области.
Предложенный способ может найти применение в системах пеленгации нескольких движущихся с близкими скоростями объектов.
Литература
1. Бакулев П.А. Радиолокационные системы. Учебник для вузов. Изд. 3-е, перераб. и доп.М.: Радиотехника, 2015. 440 с.
2. Патент RU 2799480. Способ обработки сигналов в частотной и временной областях / Клочко В.К., Б.Х. By. Приоритет 03.02.2023. Опубл. 05.07.23. Бюл. №19.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ В СИСТЕМЕ РАДИОПРИЁМНИКОВ | 2023 |
|
RU2824755C1 |
| СПОСОБ ЧАСТОТНО-ВРЕМЕННОЙ ОБРАБОТКИ СИГНАЛОВ | 2023 |
|
RU2809744C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ДВИЖУЩИХСЯ ОБЪЕКТОВ ДОПЛЕРОВСКОЙ СТАНЦИЕЙ | 2022 |
|
RU2792196C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ВО ВРЕМЕННОЙ И ЧАСТОТНОЙ ОБЛАСТЯХ | 2023 |
|
RU2799480C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ВЕКТОРОВ СКОРОСТЕЙ НЕСКОЛЬКИХ ОБЪЕКТОВ СИСТЕМОЙ ДОПЛЕРОВСКИХ ПРИЕМНИКОВ | 2022 |
|
RU2803325C1 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ПАССИВНОЙ СИСТЕМОЙ ПРИЕМНИКОВ СОВМЕСТНО С РАДИОМЕТРОМ | 2022 |
|
RU2786046C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ДВИЖУЩИМИСЯ ОБЪЕКТАМИ РАДИОСТАНЦИЕЙ С РАДИОМЕТРОМ | 2022 |
|
RU2792087C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ НЕСКОЛЬКИХ ОБЪЕКТОВ В МНОГОКАНАЛЬНЫХ ДОПЛЕРОВСКИХ РЛС | 2008 |
|
RU2373551C1 |
Изобретение относится к системам пеленгации движущихся воздушных объектов, в которых осуществляется обработка радиосигналов в приемопередающей станции, излучающей гармонический сигнал и принимающей отраженный сигнал в одном периоде зондирования. Техническим результатом является обеспечение выполнения операций обнаружения и определения угловых координат объектов в одном периоде зондирования, а также повышение вероятности обнаружения всех объектов и точности определения их угловых координат за счет дополнительной обработки во временной области. В заявленном способе выделяются сигналы от воздушных объектов во временной области и определяются их угловые координаты в одном периоде зондирования. Совместная частотно-временная обработка сигналов сводится к выбору наибольшего числа оценок, найденных во временной или частотной областях. Способ может найти применение в системах пеленгации нескольких движущихся с близкими скоростями объектов. 1 ил.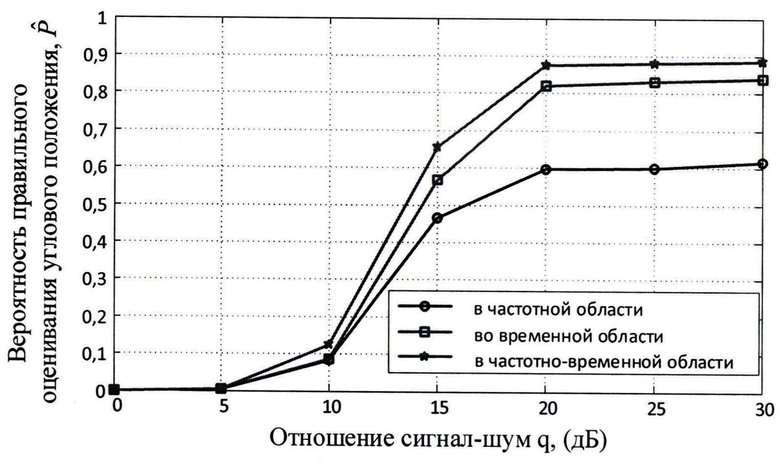
Способ частотно-временной обработки сигналов от нескольких движущихся объектов, заключающийся в передаче и приеме гармонического сигнала в одном периоде зондирования, преобразовании принятого сигнала в нескольких приемных каналах во временные последовательности, фильтрации последовательностей с обнаружением моментов времени "разладки" – несоответствия фильтрованных и экстраполированных значений сигналов элементам последовательностей, переводе временных последовательностей в частотные последовательности в спектре доплеровских частот, обнаружении частот, на которых амплитуды спектральных составляющих превышают порог обнаружения во всех приемных каналах, нахождении угловых координат объектов по разности фаз выбранных спектральных составляющих, отличающийся тем, что при обнаружении первого момента времени "разладки" подсчитывают число полупериодов фильтрованных последовательностей в приемных каналах и на их основе определяют оценку частоты сигнала от первого объекта, затем с помощью фильтра Калмана находят оценки амплитуд и фаз сигналов от первого объекта в каналах и методом разности фаз определяют угловые координаты первого объекта, после чего при обнаружении второго момента времени "разладки" по истечении времени переходного процесса из фильтрованных последовательностей входного сигнала в каналах вычитают экстраполированные значения сигналов от первого объекта и получают оценки сигналов от второго объекта, после чего с помощью фильтра Калмана находят оценки амплитуд и фаз сигналов от второго объекта и методом разности фаз определяют угловые координаты второго объекта, далее обнаруживают третий момент времени "разладки" и по истечении времени переходного процесса из фильтрованных последовательностей входного сигнала в каналах вычитают экстраполированные значения сигналов от первого и второго объектов, находят оценки амплитуд и фаз сигналов от третьего объекта и определяют угловые координаты третьего объекта, затем повторяют операции до окончания периода зондирования и, если число объектов, найденных во временной области, больше числа объектов, найденных в частотной области, передают оценки угловых координат, найденные во временной области, в противном случае передают оценки угловых координат, найденные в частотной области.
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ВО ВРЕМЕННОЙ И ЧАСТОТНОЙ ОБЛАСТЯХ | 2023 |
|
RU2799480C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ДВИЖУЩИХСЯ ОБЪЕКТОВ ДОПЛЕРОВСКОЙ СТАНЦИЕЙ | 2022 |
|
RU2792196C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2522170C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В БОРТОВОЙ ЧЕТЫРЕХКАНАЛЬНОЙ ДОПЛЕРОВСКОЙ РЛС | 2014 |
|
RU2572357C1 |
| КЛОЧКО В.К., ВУ Б.Х | |||
| Частотно-временная обработка радиосигналов // Всероссийская открытая научная конференция "Современные проблемы дистанционного зондирования, радиолокации, распространения и дифракции волн" | |||
| Муром, 27.06-29.06.2023, с | |||

