Изобретение относится к электротехнике и может быть использовано для диагностирования виткового замыкания в обмотке ротора синхронных генераторов.
Известен способ раннего обнаружения витковых замыканий и диагностирования технического состояния обмотки ротора турбогенератора с определением тока ротора по параметрам статора [RU 2472168 C2, МПК G01R 31/06 (2006.01), опубл. 10.01.2013], выбранный в качестве прототипа, заключающийся в том, что предварительно по исходным номинальным заводским данным определяют дополнительные исходные данные для конкретного генератора, измеряют в установившемся тепловом режиме генератора электрические параметры статора, измеряют ток ротора при наличии возможности непосредственного измерения тока ротора, а при отсутствии - с бесщеточной системой возбуждения - другими косвенными методами, в данный момент времени, соответствующий данному режиму работы ТГ, рассчитывают эталонный ток ротора и по измеренному и расчетному эталонному значениям тока ротора определяют количество короткозамкнутых витков по формуле
nКЗ=n(1-IРЭ/IР ИЗМ)'
где nКЗ - количество витков, которые замкнулись;
n - общее количество витков обмотки ротора;
IРЭ - эталонный ток ротора (т.е. рассчитанный по параметрам статора);
IР ИЗМ - ток ротора измеренный,
судят о начале повреждения в обмотке ротора при наличии короткозамкнутых витков nКЗ≥1.
Для обнаружения витковых замыканий этим способом необходимо производить расчет эталонного тока ротора.
Задачей изобретения является расширение арсенала средств аналогичного назначения.
Предложенный способ диагностики витковых замыканий в обмотке ротора синхронного генератора, так же как в прототипе, включает одновременное измерение в рабочем режиме электрических параметров статора, напряжения и тока ротора, о начале повреждений в обмотке ротора судят по наличию короткозамкнутых витков.
Согласно изобретению в рабочем режиме синхронного генератора измеряют мгновенные величины тока, напряжения ротора и мгновенные величины фазных токов, напряжений статора. Измеренные мгновенные величины фазных токов и напряжений статора преобразуют из естественной системы координат в двухфазную α-β систему координат. Используя полученные значения преобразованных токов и напряжений статора, определяют коэффициент квазиреактивной мощности
Q=3⋅(Iα(k)⋅Uβ(k)-Iβ(k)⋅Uα(k)),
где Iα(k), Iβ(k) - проекции токов в α-β системе координат;
Uα(k), Uβ(k) - проекции напряжений в α-β системе координат.
На вход предварительно обученной искусственной нейронной сети подают мгновенные величины тока и напряжения ротора, преобразованные токи и напряжения статора, коэффициент квазиреактивной мощности, а также их временные задержки 0,5 с, с помощью обученной искусственной нейронной сети, выявляют зависимость между входными и выходными данными искусственной нейронной сети и о начале повреждений в обмотке ротора судят по мгновенной величине оценки процента  замкнутых витков обмотки ротора синхронного генератора
замкнутых витков обмотки ротора синхронного генератора

где N=25 - количество нейронов во втором скрытом слое,
m=35 - количество нейронов в первом скрытом слое,
n=14 - количество нейронов во входном слое,
w1ji - синаптический вес i-го входа j-го нейрона первого скрытого слоя,
w1j0 - сдвиг j-го нейрона первого скрытого слоя,
w2ji - синаптический вес i-го входа j-го нейрона второго скрытого слоя,
w2j0 - сдвиг j-го нейрона второго скрытого слоя,
w3j - синаптический вес k-го входа нейрона выходного слоя,
w30 - сдвиг нейрона выходного слоя,
xi - входные сигналы искусственной нейронной сети, равные соответственно Q(k), Uα(k), Uα(k-1), Uβ(k), Uβ(k-1), Iα(k), Iα(k-1), Iβ(k), Iβ(k-1), 



где Q(k) - квазиреактивная мощность;
Q(k-1) - задержка квазиреактивной мощности;
Uα(k), Uβ(k) - проекции вектора напряжения статора;
Uα(k-1), Uβ(k-1) - задержки проекций вектора напряжений статора;
Iα(k), Iβ(k) - проекции вектора тока статора;
Iα(k-1), Iβ(k-1) - задержки проекций вектора тока статора;
 - напряжение ротора;
- напряжение ротора;
 - задержка напряжения ротора;
- задержка напряжения ротора;
 - ток ротора;
- ток ротора;
 - задержка тока ротора.
- задержка тока ротора.
Преобразование фазных токов и напряжений из естественной трехфазной системы координат в двухфазную осуществляют согласно следующим выражениям:
где IA, IB, IC - мгновенные фазные токи;
Iα, Iβ - проекции токов в α-β системе координат;
UA, UB, UC - мгновенные фазные напряжения;
Uα, Uβ - проекции напряжений в α-β системе координат.
Предложенный способ диагностики витковых замыканий в обмотке ротора синхронного генератора в отличие от прототипа позволяет проводить диагностику состояния без использования эталонного тока ротора.
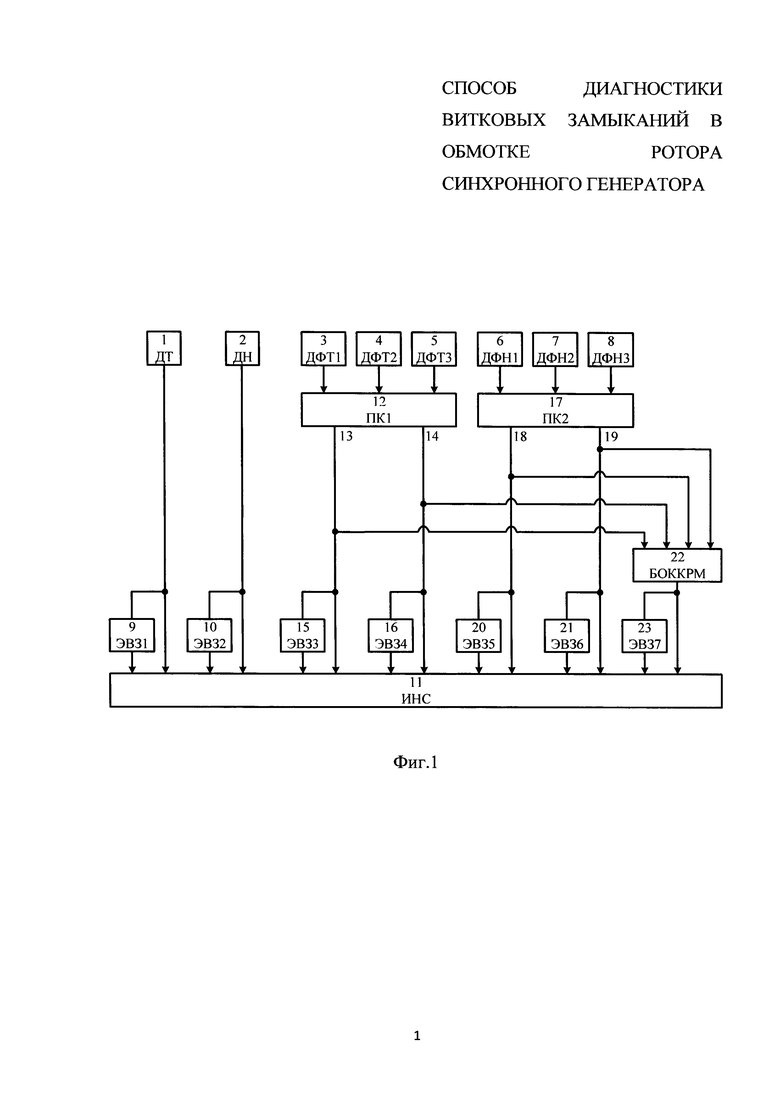
На фиг. 1 приведена схема устройства, реализующего способ диагностики витковых замыканий в обмотке ротора синхронного генератора.
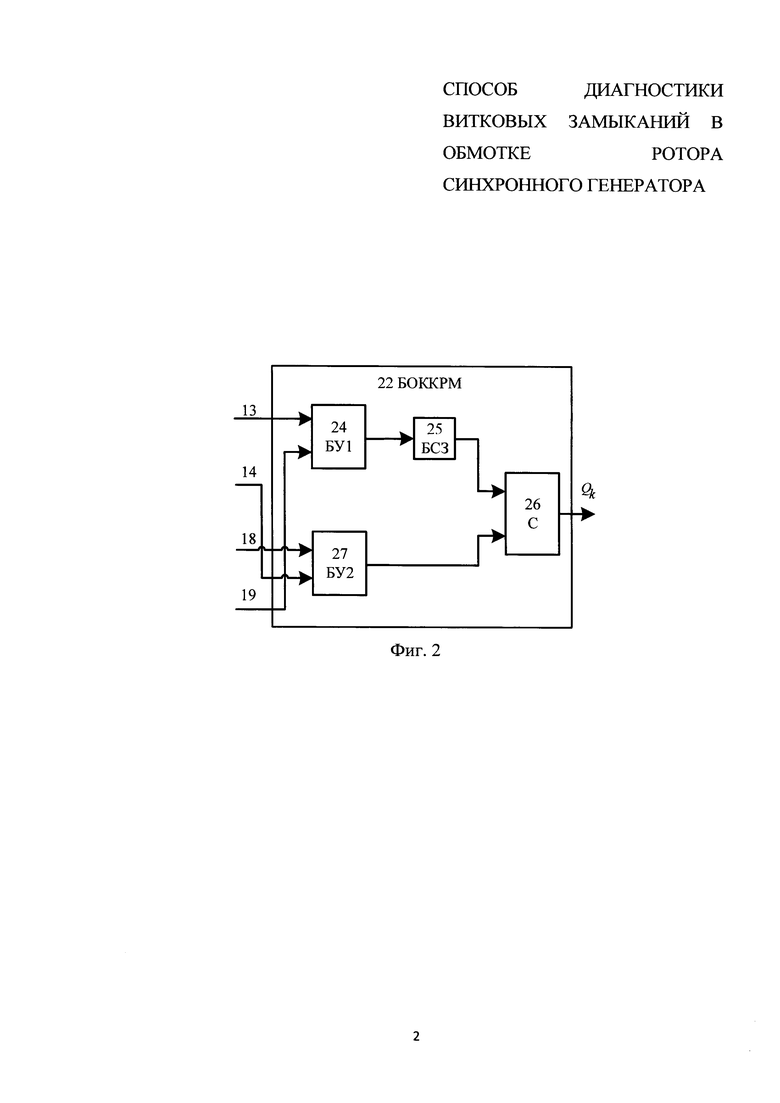
На фиг. 2 приведена структура блока определения коэффициента квазиреактивной мощности.
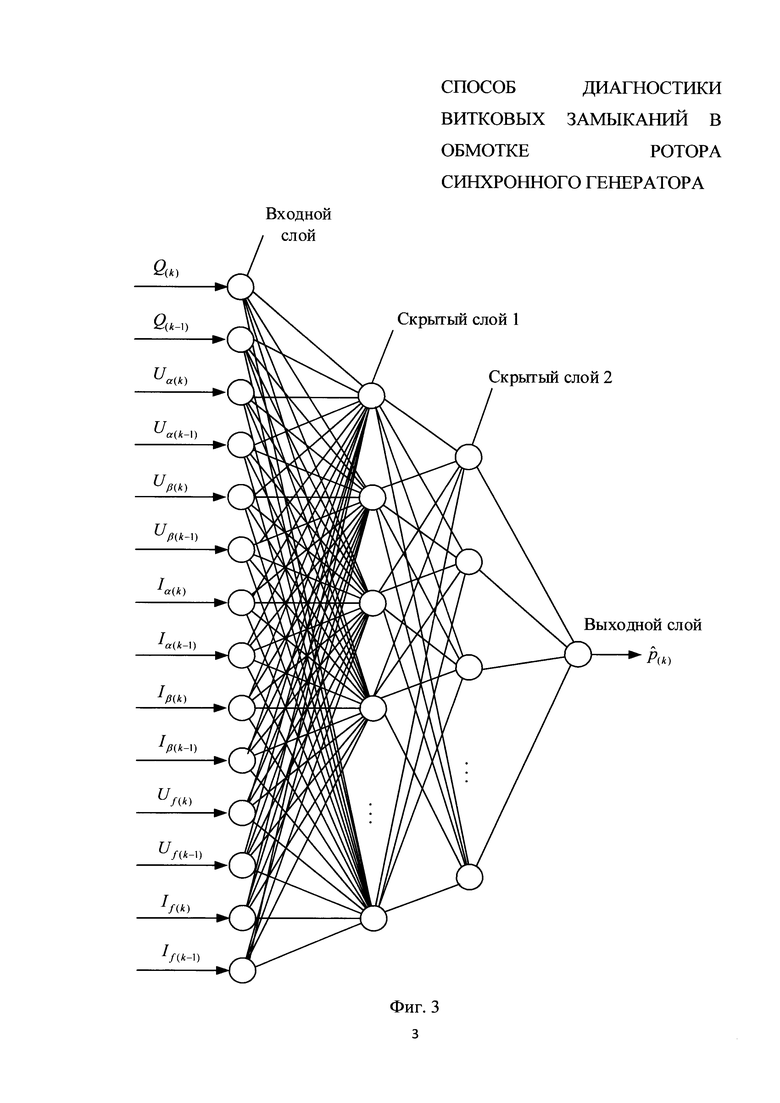
На фиг. 3 приведена структура искусственной нейронной сети.
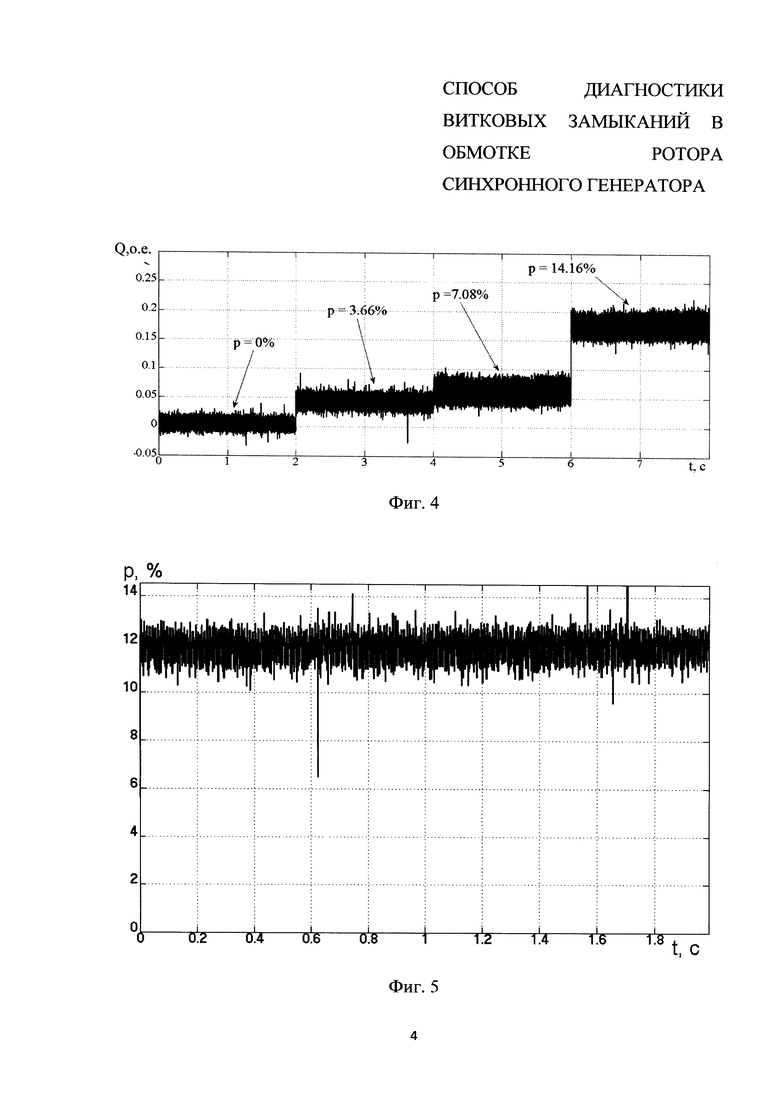
На фиг. 4 приведена рассчитанная квазиреактивная мощность при различных процентах замкнутых витков в обмотке ротора синхронного генератора типа ГАБ-2-Т/230.
На фиг. 5 приведена оценка процента замкнутых витков в роторе синхронного генератора.
Способ диагностики витковых замыканий в обмотке ротора синхронного генератора может быть осуществлен с помощью устройства (фиг. 1), содержащего датчик тока ротора 1 (ДТ) и датчик напряжения ротора 2 (ДН), подключенные к обмотке ротора, три датчика фазного тока 3 (ДФТ1), 4 (ДФТ2), 5 (ДФТ3) и три датчика фазного напряжения 6 (ДФН1), 7 (ДФН2), 8 (ДФН3), каждый из которых подключен к соответствующей фазе статора синхронного генератора.
Выход датчика тока ротора 1 (ДТ) и выход датчика напряжения ротора 2 (ДН) подключены к соответствующим элементам временной задержки 9 (ЭВЗ1) и 10 (ЭВЗ2), а также к искусственной нейронной сети 11 (ИНС). Выходы датчиков фазного тока 3 (ДФТ1), 4 (ДФТ2), 5 (ДФТ3) подключены к первому преобразователю координат 12(ПК1), выходы которого 13 и 14 соединены с соответствующим элементом временной задержки 15 (ЭВЗ3), 16 (ЭВЗ4), а также с искусственной нейронной сетью 11 (ИНС). Датчики фазного напряжения 6 (ДФН1), 7 (ДФН2), 8 (ДФН3) подключены ко второму преобразователю координат 17 (ПК2), выходы которого 18 и 19 соединены с соответствующими элементами временной задержки 20 (ЭВЗ5), 21 (ЭВЗ6), а также с искусственной нейронной сетью 11 (ИНС). Блок определения коэффициента квазиреактивной мощности 22 (БОККРМ) подключен к выходам 13 и 14 первого преобразователя координат 12 (ПК1) и к выходам 18 и 19 второго преобразователя координат 17 (ПК2). Выход блока определения коэффициента квазиреактивной мощности 22 (БОККРМ) соединен с седьмым элементом временной задержки 23 (ЭВЗ7) и с искусственной нейронной сетью 11 (ИНС), которая связана с дисплеем (не показано на фиг. 1). Выходы всех элементов временной задержки 9 (ЭВЗ1), 10 (ЭВЗ2), 15 (ЭВЗ3), 16 (ЭВЗ4), 20 (ЭВЗ5), 21 (ЭВЗ6), 23 (ЭВЗ7) соединены с искусственной нейронной сетью 11 (ИНС).
В качестве датчиков тока ротора 1 (ДТ) и датчиков фазного тока 3 (ДФТ1), 4 (ДТФ2), 5 (ДТФ3) могут быть использованы многофункциональные устройства КЭИ-0,1, а в качестве датчиков напряжения ротора 2 (ДН) и датчиков фазного напряжения 6 (ДФН1), 7 (ДФН2), 8 (ДФН3) - датчики LEM. Преобразователи координат 12 (ПК1), 17 (ПК2), блок определения коэффициента квазиреактивной мощности 22 (БОККРМ), элементы временной задержки 9 (ЭВЗ1), 10 (ЭВЗ2), 15 (ЭВЗ3), 16 (ЭВЗ4), 20 (ЭВЗ5), 21 (ЭВЗ6), 23 (ЭВЗ7) и искусственная нейронная сеть 11 (ИНС) могут быть выполнены на базе микроконтроллера типа TMS320F2812 фирмы Texas Instruments.
Блок определения коэффициента квазиреактивной мощности 22 (БОККРМ) содержит (фиг. 2) блок умножения 24 (БУ1), входы которого подключены к выходам 13 и 19. Выход блока умножения 24 (БУ1) соединен с блоком смены знака 25 (БСЗ), который подключен к сумматору 26 (С). Второй блок умножения 27 (БУ2) подключен к выходам 18 и 14. Выход блока умножения 27 (БУ2) соединен с сумматором 25 (С), который подключен к искусственной нейронной сети 11 (ИНС) и к элементу временной задержки 23 (ЭВЗ7).
Использовали четырехслойную искусственную нейронную сеть (фиг. 3) [Осовский С. Нейронные сети для обработки информации: пер. с польск. - М.: Финансы и статистика, 2002. - 344], которая состоит из входного слоя, двух скрытых слоев и выходного слоя. Количество нейронов во входном слое равно 14, в первом скрытом слое - 35, во втором скрытом слое - 25, в выходном слое - 1. Функция активации всех нейронов скрытых слоев - гиперболический тангенс, выходного слоя - линейная. Нейроны входного слоя ретранслируют входные сигналы на скрытый слой, не преобразуя их.
Перед началом работы обучили искусственную нейронную сеть на выборке, сформированной по опытным данным работы синхронного генератора типа ГАБ-2-Т/230 при различных значениях процента замыкания витков в обмотке ротора. Период дискретизации - 0,001 мс. Для обучения искусственной нейронной сети использовали алгоритм Ливенберга - Марквардта [Осовский С. Нейронные сети для обработки информации: пер. с польск. - М.: Финансы и статистика, 2002. - 344].
Процесс обучения искусственной нейронной сети проводили следующим образом: все коэффициенты связей между нейронами инициализировали случайными числами, затем сети предъявляли обучающую выборку и, с помощью алгоритма обучения, коэффициенты синаптических связей подстраивали при выполнении циклической процедуры так, чтобы расхождение между обучающей выборкой и реакцией сети на соответствующие входные данные было минимальным.
Для проверки работоспособности предложенного способа диагностики виткового замыкания в обмотке ротора синхронного генератора датчик тока ротора 1 (ДТ) и датчик напряжения ротора 2 (ДН) подключили к обмотке ротора синхронного генератора типа ГАБ-2-Т/230, датчики фазного тока 3 (ДФТ1), 4 (ДФТ2), 5 (ДФТ3) и датчики фазного напряжения 6 (ДФН1), 7 (ДФН2), 8 (ДФН3) подключили к соответствующим фазам статора синхронного генератора типа ГАБ-2-Т/230. Далее измерили мгновенные величины тока  и напряжения
и напряжения  ротора с помощью датчика тока ротора 1 (ДТ), датчика напряжения ротора 2 (ДН) и мгновенные величины токов IA(k), IB(k), IC(k) и напряжений UA(k), UB(k), UC(k) статора с помощью датчиков фазного тока 3 (ДФТ1), 4 (ДФТ2), 5 (ДФТ3) и датчиков фазного напряжения 6 (ДФН1), 7 (ДФН2), 8 (ДФН3).
ротора с помощью датчика тока ротора 1 (ДТ), датчика напряжения ротора 2 (ДН) и мгновенные величины токов IA(k), IB(k), IC(k) и напряжений UA(k), UB(k), UC(k) статора с помощью датчиков фазного тока 3 (ДФТ1), 4 (ДФТ2), 5 (ДФТ3) и датчиков фазного напряжения 6 (ДФН1), 7 (ДФН2), 8 (ДФН3).
Полученные мгновенные величины токов статора IA(k), IB(k), IC(k) передали в первый преобразователь координат 12 (ПК1), а мгновенные величины фазных напряжений статора UA(k), UB(k), UC(k) - во второй преобразователь координат 17 (ПК2). Выходные сигналы с выходов 13 и 14 первого преобразователя координат 12 (ПК1) являются проекциями вектора тока в двухфазной α-β системе координат Iα(k), Iβ(k), а выходные сигналы с выходов 18 и 19 второго преобразователя координат 17 (ПК2) являются проекциями вектора напряжения Uα(k), Uβ(k) в двухфазной α-β системе координат:
где IA, IB, IC - мгновенные фазные токи;
Iα, Iβ - проекции токов в α-β системе координат;
UA, UB, UC - мгновенные фазные напряжения;
Uα, Uβ - проекции напряжений в α-β системе координат.
Полученные значения преобразованных токов Iα(k), Iβ(k) и напряжений Uα(k), Uβ(k) подали в блок определения коэффициента квазиреактивной мощности 22 (БОККРМ), где согласно следующей формуле:
Q=3⋅(Iα(k)⋅Uβ(k)-Iβ(k)⋅Uα(k)),
где Iα(k), Iβ(k) - проекции токов в α-β системе координат;
Uα(k), Uβ(k) - проекции напряжений в α-β системе координат;
определили коэффициент квазиреактивной мощности Q(k).
С помощью элементов временной задержки 9 (ЭВЗ1), 10 (ЭВЗ2), 15 (ЭВЗ3), 16 (ЭВЗ4), 20 (ЭВЗ5), 21 (ЭВЗ6), 23 (ЭВЗ7) формируются временные задержки Q(k-1), Uα(k-1), Uβ(k-1), Iα(k-1), Iβ(k-1), 
 , равные величине t=0,5 с. Затем на вход искусственной нейронной сети 11 (ИНС) подали сигналы с выхода блока определения коэффициента квазиреактивной мощности 22 (БОККРМ) Q(k), выходные сигналы Uα(k), Uβ(k) со второго преобразователя координат 17 (ПК2), выходные сигналы Iα(k), Iβ(k) с первого преобразователя координат 12 (ПК1) и выходные сигналы
, равные величине t=0,5 с. Затем на вход искусственной нейронной сети 11 (ИНС) подали сигналы с выхода блока определения коэффициента квазиреактивной мощности 22 (БОККРМ) Q(k), выходные сигналы Uα(k), Uβ(k) со второго преобразователя координат 17 (ПК2), выходные сигналы Iα(k), Iβ(k) с первого преобразователя координат 12 (ПК1) и выходные сигналы 
 с датчиков тока ротора 1 (ДТ) и датчика напряжения ротора 2 (ДН), а также выходные сигналы Q(k-1), Uα(k-1), Uβ(k-1), Iα(k-1), Iβ(k-1),
с датчиков тока ротора 1 (ДТ) и датчика напряжения ротора 2 (ДН), а также выходные сигналы Q(k-1), Uα(k-1), Uβ(k-1), Iα(k-1), Iβ(k-1), 
 с элементов временной задержки 9 (ЭВЗ1), 10 (ЭВЗ2), 15 (ЭВЗ3), 16 (ЭВЗ4), 20 (ЭВЗ5), 21 (ЭВЗ6), 23 (ЭВЗ7).
с элементов временной задержки 9 (ЭВЗ1), 10 (ЭВЗ2), 15 (ЭВЗ3), 16 (ЭВЗ4), 20 (ЭВЗ5), 21 (ЭВЗ6), 23 (ЭВЗ7).
С помощью обученной искусственной нейронной сети 11 (ИНС), используя выявленные при обучении зависимости между входными Q(k), Q(k-1), Uα(k), Uα(k-1), Uβ(k), Uβ(k-1), Iα(k), Iα(k-1), Iβ(k), Iβ(k-1), 


 и эталонными данными
и эталонными данными  определили мгновенную величину оценки процента замкнутых витков обмотки ротора синхронного генератора
определили мгновенную величину оценки процента замкнутых витков обмотки ротора синхронного генератора  по формуле
по формуле

где N=25 - количество нейронов во втором скрытом слое,
m=35 - количество нейронов в первом скрытом слое,
n=14 - количество нейронов во входном слое,
w1ji - синаптический вес i-го входа j-го нейрона первого скрытого слоя,
w1j0 - сдвиг j-го нейрона первого скрытого слоя,
w2ji - синаптический вес i-го входа j-го нейрона второго скрытого слоя,
w2j0 - сдвиг j-го нейрона второго скрытого слоя,
w3j - синаптический вес k-го входа нейрона выходного слоя,
w30 - сдвиг нейрона выходного слоя,
xi - входные сигналы искусственной нейронной сети, равные соответственно, Q(k), Uα(k), Uα(k-1), Uβ(k), Uβ(k-1), Iα(k), Iα(k-1), Iβ(k), Iβ(k-1), 


 где
где
Q(k) - квазиреактивная мощность;
Q(k-1) - задержка квазиреактивной мощности;
Uα(k), Uβ(k) - проекции вектора напряжения статора;
Uα(k-1), Uβ(k-1) - задержки проекций вектора напряжений статора;
Iα(k), Iβ(k) - проекции вектора тока статора;
Iα(k-1), Iβ(k-1) - задержки проекций вектора тока статора;
 - напряжение ротора;
- напряжение ротора;
 - задержка напряжения ротора;
- задержка напряжения ротора;
 - ток ротора;
- ток ротора;
 - задержка тока ротора.
- задержка тока ротора.
Мгновенные величины оценки процента замкнутых витков  и квазиреактивной мощность Q(k) (фиг. 4) передали на дисплей. Опрос датчиков и расчет оценки процента замкнутых витков
и квазиреактивной мощность Q(k) (фиг. 4) передали на дисплей. Опрос датчиков и расчет оценки процента замкнутых витков  проводили с частотой 2 кГц в течение 2 с в рабочем режиме генератора. Величина временной задержки для сигналов Q(k-1), Uα(k-1), Uβ(k-1), Iα(k-1), Iβ(k-1),
проводили с частотой 2 кГц в течение 2 с в рабочем режиме генератора. Величина временной задержки для сигналов Q(k-1), Uα(k-1), Uβ(k-1), Iα(k-1), Iβ(k-1), 
 составила 0,5 с.
составила 0,5 с.
Была проведена проверка правильности определения оценки процента замкнутых витков в обмотке ротора синхронного генератора типа ГАБ-2-Т/230, для чего использовали тестирующую выборку, данные, которые не входили в обучающее множество. Временная зависимость величины процента замыкания замкнутых витков p(k) приведена на фиг. 5. Проверочная величина процента замкнутых витков, не входившая в обучающую выборку, была равна 12%.
Из приведенного сравнения определенной по заявленному способу временной зависимости оценки процента замкнутых витков в обмотке ротора и временной зависимости процента замкнутых витков видно, что ошибка оценки незначительна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕЗДАТЧИКОВОГО ОПРЕДЕЛЕНИЯ НАЧАЛЬНОГО ПОЛОЖЕНИЯ РОТОРА СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2015 |
|
RU2594358C1 |
| СПОСОБ ИЗМЕРЕНИЯ АКТИВНОЙ МОЩНОСТИ В ТРЕХФАЗНОЙ СИММЕТРИЧНОЙ СЕТИ | 2018 |
|
RU2689994C1 |
| СПОСОБ ИЗМЕРЕНИЯ РЕАКТИВНОЙ МОЩНОСТИ В ТРЕХФАЗНОЙ СИММЕТРИЧНОЙ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ | 2016 |
|
RU2629907C1 |
| СПОСОБ МОНИТОРИНГА КОНТРОЛЛЕРА ТРЕХФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2520162C2 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Способ управления синхронным электродвигателем на постоянных магнитах | 2018 |
|
RU2683586C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2011 |
|
RU2476983C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ЗАГРУЗКИ НАСОСА | 2009 |
|
RU2529652C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
Изобретение относится к электротехнике и может быть использовано для диагностирования виткового замыкания в обмотке ротора синхронных генераторов. Сущность: способ заключается в определении процента замкнутых витков на основе измеренных в рабочем режиме синхронного генератора мгновенных величин токов и напряжений фаз статора, тока и напряжения ротора. Измеренные мгновенные величины фазных токов и напряжений статора преобразуют из естественной системы координат в двухфазную α-β систему координат. Используя полученные значения преобразованных токов и напряжений статора, определяют коэффициент квазиреактивной мощности Q=3⋅(Iα(k)⋅Uβ(k)-Iβ(k)⋅Uα(k)), где Iα(k), Iβ(k) - проекции токов в α-β системе координат; Uα(k), Uβ(k) - проекции напряжений в α-β системе координат. На вход предварительно обученной искусственной нейронной сети подают мгновенные величины тока и напряжения ротора, преобразованные токи и напряжения статора, коэффициент квазиреактивной мощности, а также их временные задержки 0,5 с. С помощью обученной искусственной нейронной сети выявляют зависимость между входными и выходными данными искусственной нейронной сети. О начале повреждений в обмотке ротора судят по мгновенной величине оценки процента  замкнутых витков обмотки ротора синхронного генератора. 1 з.п. ф-лы, 5 ил.
замкнутых витков обмотки ротора синхронного генератора. 1 з.п. ф-лы, 5 ил.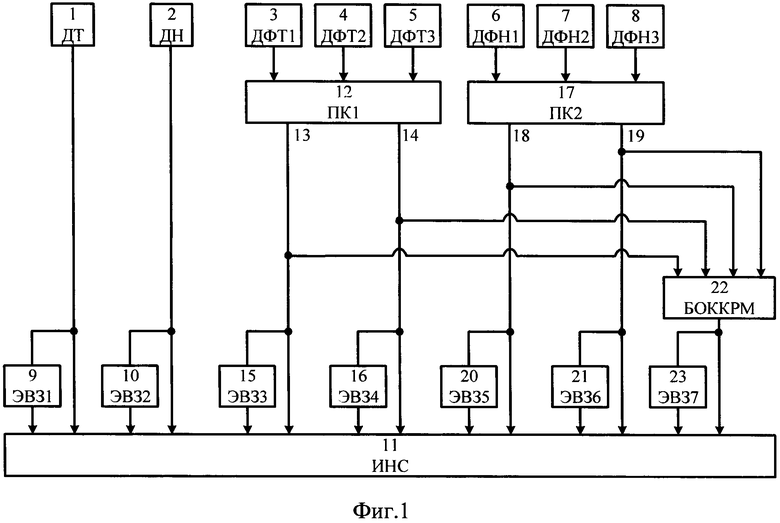
1. Способ диагностики витковых замыканий в обмотке ротора синхронного генератора, включающий одновременное измерение в рабочем режиме электрических параметров статора, напряжения и тока ротора, о начале повреждений в обмотке ротора судят по наличию короткозамкнутых витков, отличающийся тем, что измеренные мгновенные величины фазных токов и напряжений статора преобразуют из естественной системы координат в двухфазную α-β систему координат, используя полученные значения преобразованных токов и напряжений статора, определяют коэффициент квазиреактивной мощности
Q=3⋅(Iα(k)⋅Uβ(k)-Iβ(k)⋅Uα(k))
где Iα(k), Iβ(k) - проекции токов в α-β системе координат;
Uα{k), Uβ(k) - проекции напряжений в α-β системе координат;
на вход предварительно обученной искусственной нейронной сети подают мгновенные величины тока и напряжения ротора, преобразованные токи и напряжения статора, коэффициент квазиреактивной мощности, а также их временные задержки 0,5 с, с помощью обученной искусственной нейронной сети выявляют зависимость между входными и выходными данными искусственной нейронной сети и о начале повреждений в обмотке ротора судят по мгновенной величине оценки процента  замкнутых витков обмотки ротора синхронного генератора
замкнутых витков обмотки ротора синхронного генератора

где N=25 - количество нейронов во втором скрытом слое,
m=35 - количество нейронов в первом скрытом слое,
n=14 - количество нейронов во входном слое,
w1ji - синаптический вес i-го входа j-го нейрона первого скрытого слоя,
w1j0 - сдвиг j-го нейрона первого скрытого слоя,
w2ji - синаптический вес i-го входа j-го нейрона второго скрытого слоя,
W2j0 - сдвиг j-го нейрона второго скрытого слоя,
w3j - синаптический вес k-го входа нейрона выходного слоя,
w30 - сдвиг нейрона выходного слоя,
xi - входные сигналы искусственной нейронной сети, равные соответственно Q(k), Uα(k), Uα(k-1), Uβ(k), Uβ(k-1), Iα(k), Iα(k-1), Iβ(k), Iβ(k-1),  ,
,  ,
,
где Q(k) - квазиреактивная мощность;
Q(k-1) - задержка квазиреактивной мощности;
Uα{k),Uβ(k) - проекции вектора напряжения статора;
Uα(k-1), Uβ(k-1) - задержки проекций вектора напряжений статора;
Iα(k), Iβ(k) - проекции вектора тока статора;
Iα(k-1), Iβ(k-1) - задержки проекций вектора тока статора;
 - напряжение ротора;
- напряжение ротора;
 - задержка напряжения ротора;
- задержка напряжения ротора;
 - ток ротора;
- ток ротора;
 - задержка тока ротора.
- задержка тока ротора.
2. Способ по п. 1, отличающийся тем, что преобразование фазных токов и напряжений из естественной трехфазной системы координат в двухфазную осуществляют согласно следующим выражениям:
где IA, IB, IC - мгновенные фазные токи;
Iα, Iβ - проекции токов в α-β системе координат;
UA, UB, UC - мгновенные фазные напряжения;
Uα, Uβ - проекции напряжений в α-β системе координат.
| СПОСОБ РАННЕГО ОБНАРУЖЕНИЯ ВИТКОВЫХ ЗАМЫКАНИЙ И ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБМОТКИ РОТОРА ТУРБОГЕНЕРАТОРА С ОПРЕДЕЛЕНИЕМ ТОКА РОТОРА ПО ПАРАМЕТРАМ СТАТОРА | 2011 |
|
RU2472168C2 |
| УСТРОЙСТВО КОНТРОЛЯ ВИТКОВЫХ ЗАМЫКАНИЙ В ОБМОТКЕ ЯКОРЯ И ИНДУКТОРА СИНХРОННОЙ МАШИНЫ | 1999 |
|
RU2150711C1 |
| US 8536839 B2, 17.09.2013 | |||
| WO 2013004285 A1, 10.01.2013 | |||
| US 20090219030 A1, 03.09.2009 | |||
| РОЗУМ Т | |||
| И., ПОЛИЩУК В | |||
| И., Метод выявления витковых замыканий в обмотке возбуждения синхронного генератора, Фундаментальные исследования, N 8 (часть 5), с | |||
| УСТРОЙСТВО ДЛЯ ПОДВОДНОЙ СВЕТОВОЙ СИГНАЛИЗАЦИИ | 1924 |
|
SU1061A1 |

