Область техники, к которой относится изобретение
Настоящее изобретение относится к акустическому датчику.
Уровень техники
Во время эксплуатации любая конструкция может подвергнуться повреждению, которое может привести к возможному отказу конструкции. Во многих ситуациях важно осуществлять мониторинг повреждения, чтобы можно было своевременно устранить повреждение или заменить конструкцию прежде, чем произойдет какое-либо снижение работоспособности. Множество подобных конструкций создано и используется в авиационной, космической, судостроительной или автомобильной отраслях промышленности.
Когда в конструкции происходит повреждение, поврежденная область испускает акустические волны (акустическая эмиссия (АЕ)), которые распространяются через материал конструкции. Для обнаружения акустической эмиссии, возникающей, когда в конструкции происходит повреждение, размещают акустические системы мониторинга повреждений, которые являются системами обнаружения и мониторинга с использованием метода акустической эмиссии. Такие системы используются в системах неразрушающего контроля (NDT), например, системах мониторинга рабочего состояния конструкции (SHM). В определенных местах конструкции с целью обнаружения акустической эмиссии устанавливают датчики указанных систем. Регистрируется время прохождения (ToF) акустической волны к каждому датчику. В этом случае можно определить источник возникновения акустической эмиссии, используя триангуляцию времени прохождения (ToF) акустической волны на основании известных местоположений принимающих датчиков. В таких методах обнаружения акустической эмиссии используются, так называемые, пассивные акустические системы мониторинга. Другой тип акустических систем мониторинга называют активными системами. В таких активных системах датчик, установленный на данной конструкции, генерирует акустический сигнал запроса и любой полученный отраженный сигнал анализируется, чтобы идентифицировать и квалифицировать дефекты или повреждения.
В механических конструкциях таких, как отсеки самолета или компоненты, которые главным образом изготовлены из листового материала, акустические волны формируют отдельные типы пластинчатых волн, известных как волны Лэмба. В пассивных системах акустические волны испускаются повреждением, когда оно происходит, в то время как в активных системах акустические волны испускаются или генерируются датчиком. Волна Лэмба имеет множество различных типов колебаний или мод, которые способны сохранять свою форму и распространяться устойчиво или неустойчиво, в зависимости от их дисперсионного состояния. Изменение механической формы конструкции, например, пограничных областей между одним материалом и другим материалом или изменение толщины сечения данного материала могут оказывать влияние на сигнал волны Лэмба. Например, соединение материалов может оказать влияние на сигнал волны Лэмба, уменьшить его амплитуду или изменить его моду. На различные волновые моды такие изменения конструкции могут оказывать разное влияние. Например, при данном изменении конструкции по пути волны ослабление одной моды волны Лэмба может отличаться от ослабления другой моды. Действительно, ослабление некоторых мод может быть настолько большим, что когда ослабленная мода достигает данного местоположения датчика, она имеет такую амплитуду, которую датчик не может обнаружить. Волны Лэмба распространяются во всех направлениях, но они являются чувствительными к направленной жесткости и толщине конструкции, в которой они распространяются. Таким образом, распространение волн Лэмба может облегчаться в определенном направлении данной конструкции. Жесткость и толщина определяются особенностями конструкции.
Каждая мода волны Лэмба обычно имеет характерную частоту и диапазон длины волны. Однако все моды могут не достигнуть точки, в которой расположен датчик пассивной или активной системы мониторинга. Таким образом, одна проблема состоит в согласовании частоты датчиков, генерирующих или воспринимающих волны Лэмба, расположенных в данном месте, с диапазоном частоты волны, которая, вероятно, должна быть обнаружена в указанном месте.
Раскрытие изобретения
В одном из вариантов осуществления изобретения предлагается акустический датчик, содержащий:
общий электрод;
пьезоэлектрический слой с общим электродом, расположенным на одной стороне;
набор первых электродных структур, расположенных на противоположной стороне пьезоэлектрического слоя относительно общего электрода, причем каждая первая электродная структура радиально расположена относительно условной центральной точки и содержит набор расположенных по окружностям электродных элементов, при этом первые электродные структуры расположены с возможностью выбора одной или более групп электродных элементов из заданной первой электродной структуры с тем, чтобы настроить указанную заданную первую электродную структуру на заранее определенный частотный диапазон.
Каждая из набора первых электродных структур может быть размещена в заранее определенном радиальном направлении с тем, чтобы настроить структуру на сигналы, имеющие соответствующую направленность. Первые электродные структуры размещены с возможностью выбора одной или более групп электродных элементов из заданной первой электродной структуры для настройки первой заданной электродной структуры на заранее определенный частотный диапазон и для определения положения групп относительно точки номинального центра. Электродные элементы заданной первой электродной структуры могут быть выполнены с одинаковым размером вдоль окружностей. Электродные элементы заданной первой электродной структуры могут быть выполнены с размером вдоль окружностей, пропорциональным расстоянию от условной центральной точки до заданного электродного элемента.
Дополнительно датчик может содержать расположенную по окружностям вторую структуру из радиально размещенных электродных элементов. Дополнительно датчик может содержать третью структуру, центрированную относительно условной центральной точки. Третья структура может содержать один или более концентрических элементов, пространственно разделенных в радиальном направлении. Датчик может быть установлен так, чтобы он работал в частотном диапазоне от 10 кГц до 20 МГц. Каждый электродный элемент может быть соединен проводами с процессором для обработки сигнала, принятого датчиком.
Краткое описание чертежей
Далее изобретение будет описываться только с помощью примера со ссылкой на прилагаемые чертежи.
Фиг.1 - вид сбоку самолета на земле.
Фиг.2 - схематичная иллюстрация акустической системы мониторинга в самолете, представленном на фиг.1.
Фиг.3 - вид в плане датчика, применяемого в акустической системе мониторинга, представленной на фиг.2.
Фиг.4 - вид в сечении датчика, применяемого в акустической системе мониторинга, представленной на фиг.2.
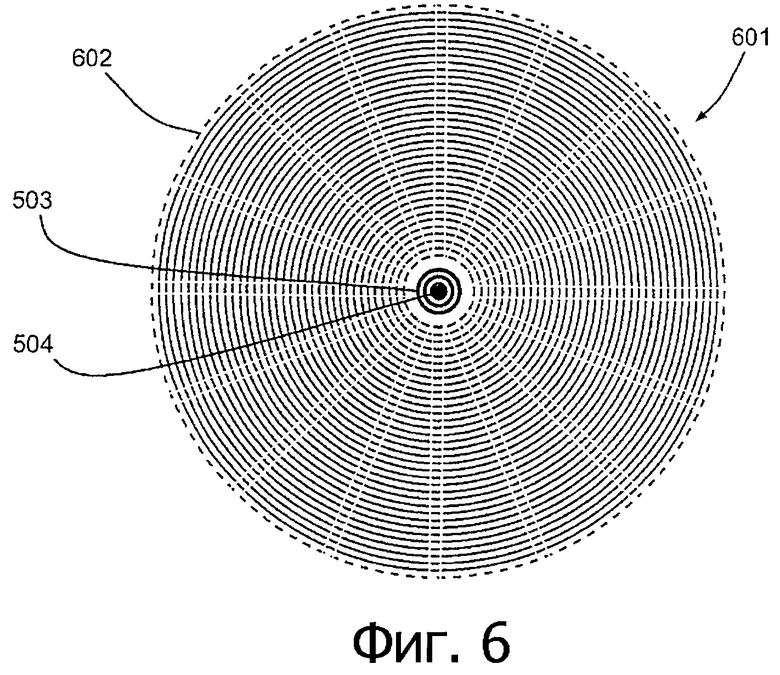
Фиг.5 и 6 - вид в плане датчиков, размещенных согласно другим вариантам.
Подробное описание предпочтительных вариантов осуществления изобретения
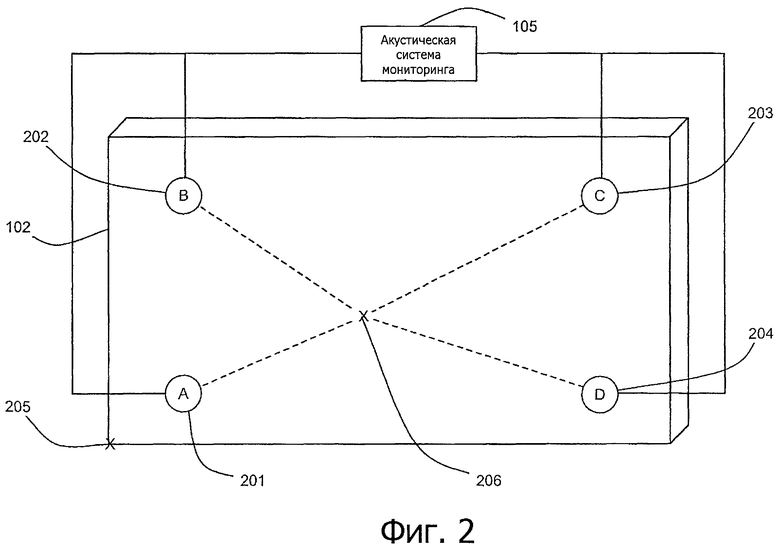
На фиг.1 представлен самолет 101, содержащий фюзеляж 102 и крылья 103, которым придана обтекаемая форма, и обтекатели 104. Самолет 101, кроме того, содержит пассивную акустическую систему 105 мониторинга, размещенную для обнаружения акустической эмиссии, вызванной повреждением конструкции самолета 101, посредством набора датчиков, представляющих собой акустические датчики (не показаны на фиг.1), установленных в конструкции самолета 101. Датчики установлены для обнаружения распространения волн Лэмба, испускаемых при повреждении конструкции самолета, чтобы идентифицировать области конструкции самолета, которые требуют проверки или ремонта. На фиг.2 показан отсек фюзеляжа 102, в котором датчики, а именно, датчики 201, 202, 203, 204 установлены в определенным местах относительно опорной точки 205 и образуют сетку. Каждый датчик 201, 202 203, 204 соединен с системой 105 акустического мониторинга.
Если происходит повреждение, например, на участке 206 фюзеляжа, акустическая эмиссия происходит от участка 206 и распространяется по фюзеляжу к датчикам 201, 202, 203, 204. На каждом из датчиков 201, 202, 203, 204 акустическая эмиссия будет обнаружена в разное время, так как существует разница в длине пути акустической волны к каждому датчику и возможная разница групповых скоростей. В примере, представленном на фиг.2, акустическая эмиссия обнаруживается сначала датчиком А 201, затем датчиком В 202, датчиком С 203 и датчиком датчик D 204. Акустическая система 105 мониторинга установлена для регистрации серии времен прохождения (ToF) акустической волны, в качестве серии относительных временных измерений, т.е. в качестве временных измерений относительно первого обнаружения акустической эмиссии любым из датчиков 201, 202, 203, 204. Другими словами, относительное время для датчика А составляет ноль и относительное время для других датчиков B, C, D является временной разницей между приемом акустической эмиссии датчиком А и ее последующим приемом другими датчиками B, C, D. Затем разность величин ToF триангулируют для определения местоположение источника акустической эмиссии.
Как отмечено выше, изменения в конструкции по-разному могут влиять на различные моды волны Лэмба. Например, при заданном изменении в конструкции ослабление одной моды волны по пути волны может отличаться от ослабления другой моды. Влияние такого изменения конструкции на акустическую эмиссию может быть рассчитано с использованием известных экспериментальных или эмпирических данных по ослаблению и теоретических данных по дисперсии для соответствующих материалов, представленных в виде дисперсионных функций или кривых. Такие дисперсионные кривые детализируют имеющиеся волновые моды и их скорости, а также длину волны (чувствительность), и используются для определения волновых мод, которые должны обнаруживаться в данной точке. В настоящем варианте осуществления изобретения дисперсионные кривые используются для подбора характеристик обнаружения частоты для каждого из датчиков 201, 202, 203, 204. Другими словами, дисперсионные кривые используются, чтобы определить, какие отдельные волновые моды имеют самые большие амплитуды на данных участках, чтобы на этих участках можно было настроить датчики 201, 202, 203, 204 на правильную детектируемую частоту, что позволяет обнаружить эти конкретные волновые моды. По дисперсионным кривым также определяют групповую и фазовую скорость каждой моды, наряду с показателем чувствительности волны Лэмба к размеру повреждения. Дисперсионные кривые могут быть построены аналитически или экспериментально.
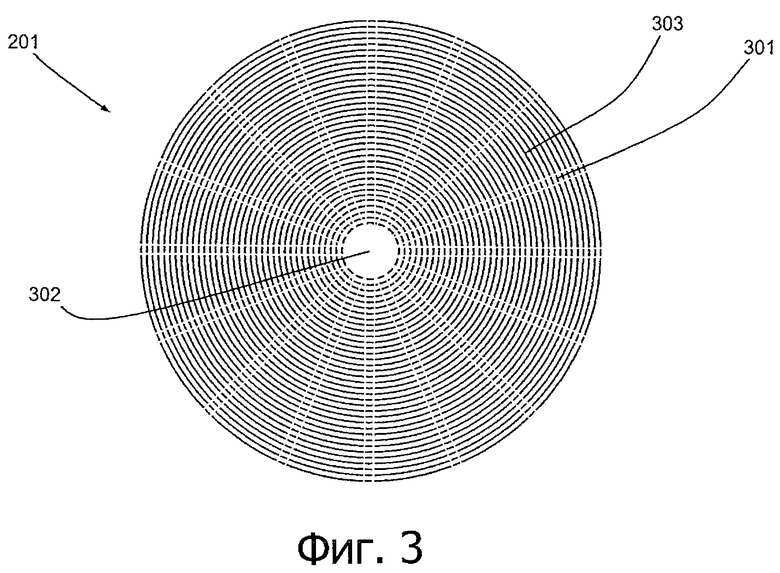
На фиг.3 видно, что каждый датчик 201 является по существу дискообразным в плане и содержит набор из шестнадцати первых электродных структур 301, размещенных вокруг точки номинального центра датчика. Каждая первая электродная структура 301 равномерно радиально расположена вокруг точки 302 номинального центра и содержит набор расположенных по окружности электродных элементов, имеющих одинаковый радиальный размер. Другими словами, каждая из первых электродных структур является полосой из электродных элементов, расположенных с одинаковыми промежутками. В настоящем варианте осуществления изобретения датчик 201, кроме того, содержит дополнительный набор из шестнадцати вторых электродных структур 303, расположенных равномерно радиально относительно точки 302 номинального центра, и размещенных между соответствующими первыми электродными структурами 301. Каждая из вторых электродных структур 303 содержит набор размещенных по окружности вторых электродных элементов, радиальный размер которых прямо пропорционален радиальному расстоянию данного электродного элемента от точки номинального центра датчика. В настоящем варианте осуществления изобретения каждая из первых и вторых структур 301, 303 включает тридцать шесть элементов. Каждая из первых и вторых электродных структур обеспечивает направленное обнаружение акустической эмиссии. Таким образом, требуются сигналы только от двух датчиков для триангуляции местоположения 206 источника акустической эмиссии.
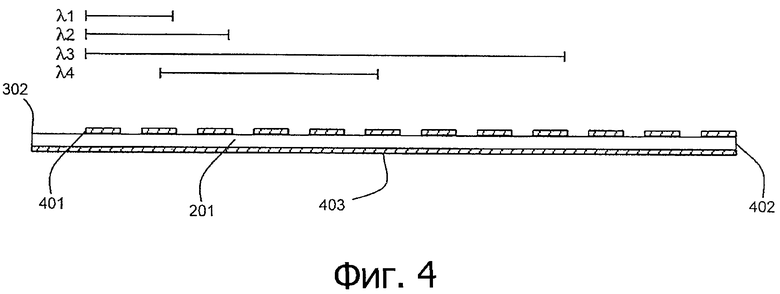
На фиг.4 показано сечение датчика 201 от центральной точки 302 через двенадцать из электродных элементов одной из первых электродных структур 301. Электродные элементы 401 первой электродной структуры 301 размещены на одной поверхности плоской пьезоэлектрической подложки в виде пластины 402 из цирконат-титанат свинца (ЦТС). Общий электрод 403 расположен на противоположной поверхности пластины 402 относительно поверхности, на которой расположены первый и второй наборы электродных структур 301, 303. Все электроды 301, 303 и 403 присоединены проводами к акустической системе 105 мониторинга, которая выполняет анализ полученных сигналов. Когда датчик 201 закреплен на поверхности, механические волны на поверхности активизируют пластину из цирконат-титанат свинца 402. Указанные возбуждения пропорционально преобразуются в электрический потенциал в пластине 402, который затем детектируется акустической системой 105 мониторинга посредством электродных структур 301, 303 и общего электрода 403. Электрический потенциал, обнаруженный каждым электродным элементом 401, зависит от радиальной ширины данного электродного элемента 401, толщины пластины из цирконат-титанат свинца 402, а также от амплитуды и частоты данной акустической эмиссии в месте данного электродного элемента 401.
Как отмечалось выше, волна Лэмба содержит набор волновых мод, каждая из которых имеет характерную частоту или диапазон длины волны и скорость распространения. Размещение матричных элементов 401 в электродной структуре 301 дает возможность избирательно настраивать структуру на данную длину волны. Другими словами, из электродной структуры 301 отбирают соответствующие матричные элементы 401, чтобы обеспечить узкополосный датчик с рабочей частотой и длиной волны, соответствующей характеристикам волновой моды, которая должна быть обнаружена, таким образом, обнаруживается меньше нежелательных волновых мод. Например, как показано на фиг.4, при подборе первых и вторых электродных элементов слева, согласно фиг.4, будет настраиваться электродная структура 301 для обнаружения заданной длины волны XI, которая определяется следующим уравнением:
λ1=n.λX,
где λ1 пропорциональна длине волны (λX) моды Y волны Лэмба; n - коэффициент пропорциональности, причем, n - целое число. Кроме того, длина волны λ1 может быть выбрана для настройки электродной структуры 301, чтобы исключить заданную моду Y волны Лэмба, как определено следующим уравнением:
λ1=(m/h).λY,
где λ1 пропорциональна длине волны (λY)исключенной моды Y волны Лэмба; m/h - коэффициент пропорциональности, причем m - целое число и h - переменная, имеющая оптимальное значение, равное 2. Если λ1 выбрано так, что h=2, регистрация моды Y будет полностью исключена. Чем больше величина h отличается от ее оптимального значения, равного двум, тем большая часть амплитуды моды Y будет регистрироваться.
Для примера рассматриваются две моды X и Y волны Лэмба с длинами волн 3 мм и 42 мм, соответственно. Чтобы удалить моду Y, выбирают расстояние между двумя электродными элементами λ1=21 мм, которое равно длине волны моды X, умноженной на 7, и равно половине длины волны моды Y. Другими словами, n=7, m=1 и h=2. Если бы было выбрано расстояние между двумя электродными элементами λ1=63 мм, был бы достигнут тот же самый результат, если не принимать во внимание ослабление моды волны Лэмба. В следующем примере, если рассматривать две моды X и Y с соответствующими длинами волн 4 мм и 22,5 мм, тогда для удаления моды Y выбранное расстояние между двумя (или более) электродными элементами составляло бы λ1=12 мм, т.е. λX умноженное на 3 и приблизительно было бы равно ½. λY. Другими словами, n=3, m=1 и h=1,875. Таким образом, будет обнаруживаться только мода X, а мода Y будет в основном исключаться, однако не полностью, поскольку h не равно 2. Альтернативно, для обнаружения моды Y и исключения моды X датчик настраивают так, чтобы длина электродного элемента была λ1=22,5 мм, т.е. равна 15·½λY (n не целое число) и 1·λY (m=2 и h=2). Другими словами, физическое пространство, занимаемое комбинацией элементов первых или вторых электродных структур, должно соответствовать или приближаться к длине волны λ1. Аналогично, выбор электродных элементов 401 с первого по третий или с первого по девятый слева приведет к настройке электродной структуры для приема длин волн λ2 и λ3, как показано на фиг.4.
Могут быть выбраны раздельные группы элементов для обнаружения длины волны, соответствующей расстоянию между центрами каждой такой выбранной группы. Например, выбор первого, второго и третьего электродных элементов слева для одной группы и пятого, шестого и седьмого электродных элементов слева для второй группы привел бы к электродной структуре, настроенной на длину волны λ4. Длина волны λ4 соответствует физическому расстоянию между центрами двух выбранных групп электродных элементов. Таким образом, используя соответствующую дисперсионную кривую для материала, на котором закреплен датчик 201, можно определить соответствующие моды для данной точки закрепления датчика и, соответственно, настроить датчик 201. Детали по определению дисперсионных кривых для композиционного материала описаны в работе "Design of optimal configuration for generating АО Lamb mode in a composite plate using piezoceramic transducers" авторов Sebastien Grondel, Christophe Paget, Christophe Delebarre и Jamal Assaad, в Journal of the Acoustical Society of America, 112(1), июль 2002. В настоящем варианте осуществления изобретения настройку датчика выполняют посредством акустической системы 105 мониторинга при соответствующем выборе и обработке сигналов от электродных элементов 401 датчика 201.
Как будет понятно специалистам в данной области техники, для настройки электродной структуры 301 может быть выбран любой набор из групп электродных элементов 401. Например, для данной длины волны можно использовать электродные элементы от пятого до двадцатого, обеспечивая, таким образом, обнаружение волны Лэмба, смещенной относительно центральной точки 302. Наличие в настоящем варианте осуществления изобретения шестнадцати радиально разделенных электродных структур 301 позволяет обеспечить настройку датчика по направлению для каждой электродной структуры 301, настраиваемой на заданную частоту или длину волны. Направленное обнаружение волны Лэмба позволяет сфокусировать датчик на потенциальный источник повреждения или использовать его в сочетании с одним или несколькими другими подобными датчиками для триангуляции положения источника акустической эмиссии.
В настоящем варианте осуществления изобретения вторые электродные структуры 303 размещены таким образом, чтобы они были настроенными аналогично первой электродной структуре 301. Каждая из первых электродных структур 301 имеет электродные элементы 401 одинаковой ширины и сфокусирована в определенном единственном направлении с узкой зоной обнаружения. Каждая из вторых электродных структур 303, имеет электродные элементы с радиально увеличивающейся шириной и менее сфокусирована, она имеет расходящуюся зону обнаружения. Расходящаяся зона обнаружения обеспечивает более сложные, однако, более обширные данные для анализа. Другими словами, вторая электродная структура 303 может обеспечить больший диапазон обнаружения акустической эмиссии, потенциально обеспечивая более точные данные о месте повреждения.
В дополнительном варианте осуществления изобретения датчик 201, представленный на фиг.3, применяется в активной акустической системе мониторинга, являющейся акустической системой контроля, в которой используется первая электродная структура 301, чтобы генерировать направленную волну Лэмба с частотой, которая выбрана, как описано выше. Направление генерированных волн также может быть выбрано путем подачи питания на одну или более соответственно ориентированных первых электродных структур 301. В этом случае вторые электродные структуры 303 используются для обнаружения отраженных сигналов или отражений генерированных волн Лэмба, вызванных поврежденными участками.
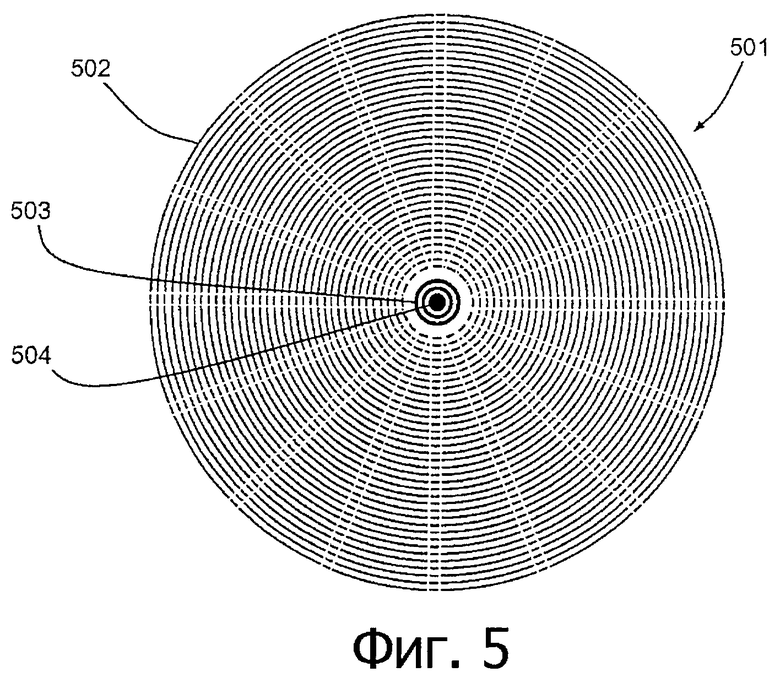
В другом варианте осуществления изобретения, как показано на фиг.5, датчик 501 дополнительно содержит центральную третью электродную структуру 503, расположенную на центральной точке 504 датчика 501. Третья электродная структура 503 содержит два концентрических кольцевых электродных элемента, центрированных относительно центрального дискового электродного элемента. Концентрические кольцевые электродные элементы выбирают так, чтобы можно было использовать третью электродную структуру 503 в качестве многоцелевого узкополосного датчика. Резонансная частота третьей электродной структуры 503 регулируется общим диаметром выбранной группы кольцевых электродных элементов. Третья электродная структура 503 приводится в действие соответствующим сигналом, обработанным методом окна, обычно с помощью фильтра Ханнинга или фильтра Хэмминга так, чтобы испускались волны Лэмба. Третья электродная структура 503 может использоваться для генерирования направленной волны Лэмба, так чтобы датчик 501 использовался в качестве импульсного/эхо датчика, применяемого в акустической системе контроля. В таких системах акустического контроля используются неразрушающие методы испытаний для обнаружения повреждения в сложных агрегатах, например, конструкциях самолета.
В другом варианте осуществления изобретения, как показано на фиг.6, датчик 601 дополнительно содержит четвертую электродную структуру 602, составленную из радиально расположенных электродных элементов. Четвертая электродная структура включает 180 электродных элементов, причем каждый электродный элемент размещен так, чтобы он мог обнаруживать компоненты сигнала, испускаемого третьей электродной структурой 503 и отраженного областью повреждения в контролируемой конструкции. Радиальное местоположение электродного элементарна котором обнаружен отраженный сигнал, указывает направление местоположения повреждения относительно датчика 601. Таким образом, датчик 601 является подходящим для использования как в активной, так и в пассивной акустических системах мониторинга для определения местоположения источника направленного сигнала.
В другом варианте осуществления изобретения датчик содержит только набор параллельных электродных структур для настраиваемого обнаружения волны Лэмба или ее генерирования. В дополнительном варианте осуществления изобретения датчик содержит только набор расходящихся электродных структур для настраиваемого обнаружения волны Лэмба или ее генерирования. Специалистам в данной области техники понятно, что параллельные электродные структуры являются более энергоэффективными по сравнению с расходящимися электродными структурами, но имеют меньшую физическую зону действия, в то же время расходящиеся электродные структуры потребляют больше энергии, но имеют большую физическую зону действия. В другом варианте осуществления изобретения датчик содержит только электродные структуры, представляющие собой третью и четвертую электродные структуры, как описано выше.
В другом варианте осуществления изобретения сам датчик может использоваться в процедуре наладки для определения необходимой частоты настройки, без необходимости расчета теоретических дисперсионных кривых. Например, датчик можно закрепить на рабочей поверхности, и затем активизировать, используя метод направленной волны Лэмба. Результирующие сигналы, генерируемые датчиком, затем анализируют при использовании классических методов, например, методов двухмерного быстрого преобразования Фурье (2D FFT), для определения дисперсионных кривых, включая амплитуды моды волны Лэмба, таким образом, имеется возможность настроить частоту датчика для рабочего обнаружения данной моды волны. Каждая структура в датчике может использоваться для определения дисперсионных кривых в соответствующем направлении и месте в пределах площади основания датчика. Как правило, для получения результатов используется 32 элемента датчика 301. Однако при использовании структур с обеих сторон элементов 503 и 504, количество элементов в структуре 301 может быть уменьшено до 16. С другой стороны, сохранение неизменного количества (32) элементов в структуре 301 будет повышать точность определения дисперсионной кривой.
В дополнительном варианте осуществления изобретения используются расходящиеся структуры для сбора энергии низкочастотных колебаний конструкции, например, аэродинамических или вибрации/шума двигателя. В другом варианте осуществления изобретения структура из таких собирающих энергию датчиков размещена так, чтобы энергия от одного источника энергии передавалась по беспроводной связи от одного датчика к другому. Источником энергии может являться сам датчик. В другом варианте осуществления изобретения датчики используются для сбора энергии высокочастотных колебаний, что дает возможность данному приведенному в действие датчику обеспечивать энергией окружающие датчики по беспроводной связи посредством волн Лэмба.
В дополнительном варианте осуществления изобретения расходящиеся или параллельные электродные структуры используются для передачи данных, закодированных в волне Лэмба, для обеспечения связи между датчиками. Посредством такой связи могут передаваться данные по сети таких датчиков, или такая связь может использоваться для передачи командных сообщений между датчиками. В другом варианте осуществления изобретения для создания комплексной или сложной волны Лэмба используются параллельные или расходящиеся электродные структуры, подходящие для выполнения высокочувствительного или сложного определения местоположения повреждения методом акустической эмиссии.
В вариантах осуществления настоящего изобретения датчики содержат первые и вторые радиальные электродные структуры с тридцатью электродными элементами, или третьи центральные электродные структуры с тремя элементами. Специалистам в данной области техники понятно, что при меньшем количестве элементов будет уменьшаться возможное частотное разрешение электродных структур, в то время как при большем количестве электродных элементов возможное частотное разрешение электродных структур будет увеличиваться. Аналогично, электродные элементы, расположенные с малыми промежутками или радиально более узкие электродные элементы увеличат возможное частотное разрешение электродных структур, в то время как электродные элементы, расположенные с большими промежутками или радиально более широкие электродные элементы уменьшат возможное частотное разрешение электродных структур. В вариантах осуществления изобретения могут быть предусмотрены структуры из элементов различных размеров или с разными промежутками, таким образом, можно получить датчик с множеством структур с различной частотой или с разными диапазонами длин волн и разными разрешениями. Структуры могут состоять из электродных элементов неодинакового размера или расположенных с разными промежутками, чтобы в данном диапазоне обеспечить нелинейное частотное разрешение.
Специалистам в данной области техники понятно, что полный размер датчика определяется множеством факторов. Наибольшее расстояние между элементами определяется половиной наибольшей длины волны моды волны Лэмба, которую требуется исключить или отфильтровать при обнаружении или генерировании. Кроме того, это расстояние также оптимально равно кратному числу длины волны моды волны Лэмба, которая должна обнаруживаться или генерироваться.
Специалистам в данной области техники понятно, что датчики могут быть размещены в любой подходящей конфигурации на конструкции, и которой они применяются. Как описано выше, может использоваться любая комбинация датчиков, имеющих различные характеристики, и, кроме того, комбинации могут объединяться в зависимости от их применения. Например, для некоторых применений может подходить комбинация одного передающего датчика с одним или более принимающими датчиками. Кроме того, датчик не обязательно должен быть круглой формы, для обеспечения желательного частотного диапазона, разрешения и направленности может использоваться датчик любой подходящей формы.
Специалистам в данной области техники понятно, хотя варианты осуществления изобретения, описанные выше, иллюстрируют изобретение на примере основных конструктивных элементов самолета, а именно, на примере фюзеляжа самолета, изобретение одинаково применимо к другим элементам самолета, таким конструкциям, как двери, двигатели, органы управления или шасси.
Специалистам в данной области техники понятно, что для изготовления датчика можно использовать самые разнообразные технологии, например, с использованием фотолитографии или функциональной литографии. Специалистам в данной области техники понятно, что датчик может быть сформирован из любого подходящего пьезоэлектрического материала, например, можно использовать цирконат-титанат свинца, поливинилиденфторид (PVDF), и также он может быть сформирован из композитных слоев или являться пьезоэлектриком столбчатого типа. Специалистам в данной области техники понятно, что радиальное положение электродных структур может совпадать с ориентацией волокна в структуре, содержащей композиционный материал.
Специалистам в данной области техники понятно, что устройство, в котором воплощена часть изобретения или все настоящее изобретение, может быть устройством общего назначения, имеющим программное обеспечение, установленное для обеспечения воплощения части изобретения или всего изобретения. Устройство может представлять собой единичное устройство или совокупность устройств, и программное обеспечение может быть одной программой или набором программ. Кроме того, любая часть программного обеспечения или все программное обеспечение, используемое для осуществления изобретения, может обеспечивать связь посредством любого подходящего средства передачи или хранения таким образом, что программное обеспечение может быть загружено в одно или более устройств.
В то время как настоящее изобретение было иллюстрировано описанием вариантов его осуществления, и в то время как варианты осуществления изобретения были описаны довольно подробно, заявитель не предназначает эти подробности для ограничения или какого-либо лимитирования объема прилагаемых пунктов формулы изобретения. Дополнительные преимущества и модификации, несомненно, будут понятны специалистам в данной области техники. Поэтому изобретение в его более широком аспекте не ограничивается деталями представленного устройства и способа изготовления, а также иллюстративными примерами, приведенными и описанными. Соответственно, могут быть выполнены отклонения, не выходящие за рамки существа или объема общей идеи изобретения.
Изобретение относится к измерительной технике, в частности к акустическим датчикам. Акустический датчик содержит пьезоэлектрическую подложку, общий электрод, расположенный на одной стороне пьезоэлектрической подложки, набор первых электродных структур, расположенных на противоположной стороне пьезоэлектрической подложки относительно общего электрода, причем каждая первая электродная структура расположена радиально относительно условной центральной точки и содержит набор электродных элементов, расположенных по окружностям. При этом указанные первые электродные структуры расположены с возможностью выбора одной или более групп электродных элементов из заданной первой электродной структуры, с тем чтобы настроить указанную первую электродную структуру на заранее определенный частотный диапазон, а каждая указанная первая электродная структура размещена в заранее определенном радиальном направлении относительно указанной условной центральной точки, так чтобы настроить каждую указанную первую электродную структуру на сигналы, имеющие соответствующую направленность. Дополнительно датчик снабжен второй и третьей электродными структурами и может работать в диапазоне частот от 10 кГц до 20 МГц с использованием направленных волн Лэмба. Технический результат изобретения - повышение точности определения места повреждений. 9 з.п. ф-лы, 6 ил.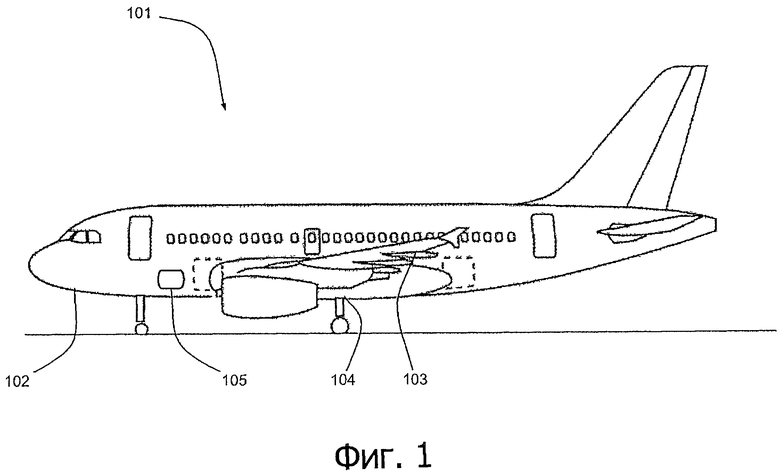
1. Акустический датчик, содержащий:
пьезоэлектрическую подложку;
общий электрод, расположенный на одной стороне пьезоэлектрической подложки;
набор первых электродных структур, расположенных на противоположной стороне пьезоэлектрической подложки относительно общего электрода, причем каждая первая электродная структура расположена радиально относительно условной центральной точки и содержит набор электродных элементов, расположенных по окружностям, при этом указанные первые электродные структуры расположены с возможностью выбора одной или более групп электродных элементов из заданной первой электродной структуры, с тем, чтобы настроить указанную первую электродную структуру на заранее определенный частотный диапазон, при этом каждая указанная первая электродная структура размещена в заранее определенном радиальном направлении относительно указанной условной центральной точки, так чтобы настроить каждую указанную первую электродную структуру на сигналы, имеющие соответствующую направленность.
2. Акустический датчик по п.1, в котором первые электродные структуры размещены с возможностью выбора одной или более групп электродных элементов из заданной первой электродной структуры для настройки указанной заданной первой электродной структуры на заранее определенный частотный диапазон и для определения положения групп относительно условной центральной точки.
3. Акустический датчик по п.1, в котором электродные элементы для одной или более первых электродных структур выполнены с одинаковым размером в направлении окружностей.
4. Акустический датчик по п.1, в котором электродные элементы для одной или более первых электродных структур выполнены с размером вдоль окружностей, пропорциональным расстоянию от указанной условной центральной точки до заданного электродного элемента.
5. Акустический датчик по п.1, характеризующийся тем, что дополнительно содержит расположенную по окружностям вторую структуру из радиально размещенных электродных элементов.
6. Акустический датчик по п.1, характеризующийся тем, что дополнительно содержит третью структуру, центрированную относительно указанной условной центральной точки.
7. Акустический датчик по п.6, в котором третья структура содержит один или более концентрических элементов, пространственно разделенных в радиальном направлении.
8. Акустический датчик по п.1, характеризующийся тем, что выполнен с возможностью работы в частотном диапазоне от 10 кГц до 20 МГц.
9. Акустический датчик по п.1, характеризующийся тем, что выполнен с возможностью использования с направленными волнами Лэмба.
10. Акустический датчик по п.1, в котором каждый электродный элемент соединен проводами с процессором для обработки сигнала, принятого указанным датчиком.
| US 6984923 В1, 10.01.2006 | |||
| М | |||
| Akhnak, О | |||
| Martinezb, L | |||
| Gomez-Ullateb, F | |||
| Montero de Espinosa | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Bruce W | |||
| Drinkwater | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| US 20070012111 A1, 18.01.2007 | |||
| US 20050089077 | |||

