Область техники, к которой относится изобретение
Изобретение относится к сельскохозяйственному поршневому прессу, с помощью которого подобранную с поля убранную массу формируют в кипы.
Уровень техники
Такой поршневой пресс известен, например, из патентного документа ЕР 1769674 В1.
Этот обычный поршневой пресс содержит прессовальную камеру, в которой приводится в колебательное движение поршень, чтобы уплотнять в тюк поданную в прессовальную камеру убранную массу. Убранная масса поступает в прессовальную камеру от подборщика, который подбирает ее с поля, через подающий канал, в котором передвигается подгребатель или так называемый упаковщик. Упаковщик совершает движения двух видов. При ходе первого вида, - ходе сбора, - он заходит в подающий канал вблизи его входа и движется только через его переднюю часть, чтобы отодвинуть от входа подающего канала вновь поступившую в него убранную массу и произвести ее предварительное уплотнение, а также освободить место на входе для следующей убранной массы. При ходе второго вида, - ходе загрузки, - упаковщик движется от входа подающего канала до его выхода и подает собранную в нем и предварительно уплотненную убранную массу из подающего канала в прессовальную камеру.
Упаковщик содержит двуплечий рычаг упаковщика. На конце первого плеча рычага упаковщика укреплены заходящие в подающий канал грабельные зубья, а конец второго плеча шарнирно соединен с соединительной тягой упаковщика, при этом точка центра тяжести между двумя плечами рычага с помощью эксцентрикового привода совершает движение по круговой траектории. Дальний от рычага упаковщика конец соединительной тяги шарнирно прикреплен к управляющему рычагу упаковщика. Когда управляющий рычаг упаковщика неподвижен, в то время как точка центра тяжести рычага упаковщика движется по своей круговой траектории, шарнир, соединяющий соединительную тягу со вторым плечом рычага, движется по дуге окружности, и грабельные зубья совершают движения хода сбора по эллиптической траектории, вытянутой в горизонтальном направлении.
Для управления ходом загрузки управляющий рычаг, в свою очередь, соединен с помощью соединительной тяги с приводом прессовального поршня и совершает колебательное движение, которое приводит к тому, что грабельные зубья следуют по серповидной траектории.
В идеальном случае как при ходе сбора, так и при ходе загрузки грабельные зубья должны круто входить в подающий канал у его входа и затем двигаться на небольшом расстоянии от днища канала, чтобы захватывать всю убранную массу в подающем канале. В конце хода сбора грабельные зубья должны снова круто выходить из канала, причем место их выхода должно выбираться таким, чтобы в подающем канале получать предварительно уплотненную порцию убранной массы, длина которой точно соответствует высоте прессовальной камеры, так что когда эта порция подается в прессовальную камеру за счет хода загрузки, она равномерно заполняет все поперечное сечение прессовальной камеры. При ходе загрузки грабельные зубья должны следовать по днищу канала до его выхода и затем удаляться из него. Эти условия трудно выполнимы с помощью обычного приводного механизма. Поскольку при ходе загрузки управляющий рычаг упаковщика совершает непрерывное движение, траектории грабельных зубьев при ходе загрузки и при ходе сбора могут совпадать только в отдельных точках, хотя было бы целесообразным точное совпадение траекторий в передней части подающего канала.
Раскрытие изобретения
Соответственно, задачей изобретения является создание поршневого пресса, в котором привод упаковщика дает высокую степень свободы для настройки траекторий движения упаковщика.
В соответствии с изобретением решение поставленной задачи достигается за счет того, что в сельскохозяйственном поршневом прессе, содержащем прессовальную камеру, в которой установлен с возможностью колебательного движения прессовальный поршень, и подающий канал, в котором упаковщик может двигаться с возможностью переключения между ходом сбора, уплотняющим убранную массу в подающем канале, и ходом загрузки убранной массы из подающего канала в прессовальную камеру, привод упаковщика содержит управляющий рычаг, который для управления, по меньшей мере, одним из ходов упаковщика взаимодействует с регулируемым упором.
Предпочтительно, регулируемый упор выполнен в виде кулачкового диска, который может приводиться во вращение. При придании кулачковому диску соответствующей формы может достигаться любое соотношение между фазой вращательного движения кулачкового диска и получаемым в результате этого отклонением управляющего рычага.
Для снижения до минимума трения и износа предпочтительно на управляющем рычаге установлен ролик для упора в кулачковый диск.
Для того чтобы быстро отводить убранную массу, непрерывно подаваемую на вход подающего канала, и предварительно уплотнять ее небольшими порциями, желательно быстрое движение упаковщика, в то время как прессовальный поршень может иметь заметно более медленный период движения, чем упаковщик. В том случае, когда частота движения упаковщика составляет n-кратную величину частоты движения прессовального поршня, вращающийся с частотой движения прессовального поршня кулачковый диск может содержать равное n число секторов для управления числом n циклов движения упаковщика.
Согласно предпочтительному примеру осуществления движение упаковщика, при котором управляющий рычаг взаимодействует с регулируемым упором, является движением хода сбора.
Когда регулируемый упор вызывает движение управляющего рычага с периодичностью движения упаковщика, посредством процесса этого движения можно преднамеренно оказывать влияние на траекторию обратного движения упаковщика.
Для того чтобы принудить управляющий рычаг следовать движению регулируемого упора, предпочтительно управляющий рычаг прижимается к регулируемому упору посредством упругого элемента.
Для того чтобы можно было направлять упаковщик при движении хода загрузки, по меньшей мере, частично по траектории, отличной от хода сбора, может быть предусмотрен соединительный элемент, который, по меньшей мере, в течение части хода загрузки удерживает управляющий рычаг отведенным от упора.
Предпочтительно этот соединительный элемент выполнен в виде телескопической тяги, которая может переводиться из состояния переменной длины, в котором она не преодолевает усилия упругого элемента, в состояние фиксированной длины, в котором она передает на управляющий рычаг достаточное усилие для преодоления усилия упругого элемента.
В свою очередь, соединительный элемент может приводиться приводным валом, который приводит также прессовальный поршень.
Краткий перечень чертежей
Другие особенности и преимущества изобретения будут ясны из последующего описания примера выполнения со ссылками на прилагаемые чертежи. На чертежах:
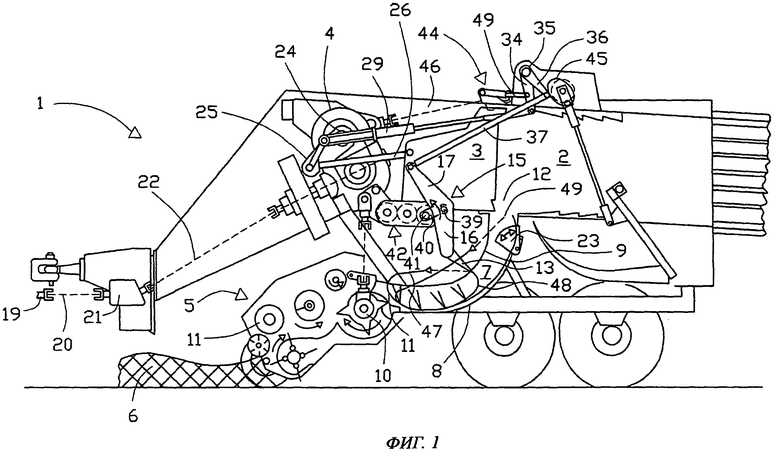
фиг.1 изображает на виде сбоку поршневой пресс по изобретению,
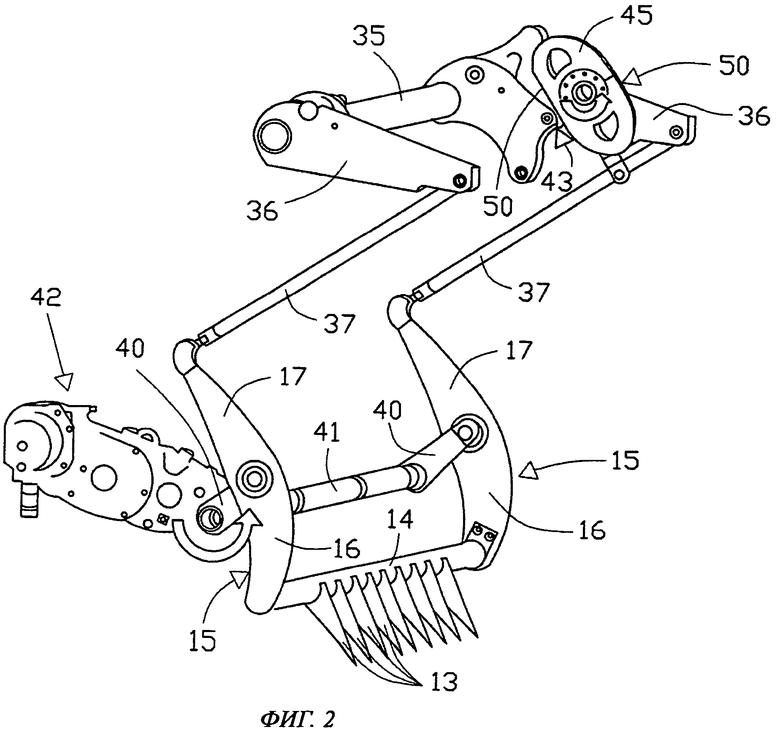
фиг.2 изображает в перспективе механизм упаковщика поршневого пресса.
Осуществление изобретения
Схематично показанный на фиг.1 на виде сбоку поршневой пресс 1 выполнен в виде прицепа для сцепки с не показанным тягачом. Он содержит подбирающее устройство 5, называемое также подборщиком и предназначенное для подбора с поля убираемой массы 6 с земли. Собранная подборщиком 5 и измельченная измельчительным устройством 10 убранная масса подается на вход 11 подающего канала 7, выход 12 которого сообщается с прессовальной камерой 2. Прессовальный поршень 3, совершающий в прессовальной камере 2 возвратно-поступательное движение, уплотняет подаваемую убранную массу, при этом находящаяся в нижней по ходу убранной массы части прессовальной камеры 2 уплотненная убранная масса и готовые тюки убранной массы служат в качестве противоопоры для уплотнения.
Подающий канал 7 проходит по дуге между входом 11 и выходом 12 и ограничен вогнутым днищем 8 и крышей 9. В крыше 9 выполнено множество продольных прорезей, через которые грабельные зубья 13 могут заходить в подающий канал 7. Как показано на фиг.2, грабельные зубья 13 укреплены на несущей поперечине 14. Два рычага 15 упаковщика содержат каждый два расположенных под тупым углом друг к другу плеча 16, 17, переходящие одно в другое на оси 39. Нижние плечи 16 двух рычагов 15 упаковщика поддерживают несущую поперечину 14. Ось 39 с помощью двух кривошипов 40 упаковщика приводится в движение по круговой траектории вокруг приводного вала 41. Приводной вал 41 кинематически соединен с помощью цилиндрического зубчатого передаточного механизма 42 с главным передаточным механизмом 4, который, в свою очередь, через карданный вал 22, передаточный механизм 21 между непараллельными валами и другой карданный вал 20 подсоединен к тягачу и снабжается от него приводной энергией.
Свободный конец верхнего плеча 17 каждого рычага 15 упаковщика шарнирно соединен соединительной тягой 37 упаковщика с управляющим рычагом 36, который расположен над прессовальной камерой 2 и может поворачиваться вокруг оси управляющего вала 35. Управляющий рычаг 36 прижимается в направлении против часовой стрелки пружинным элементом, выполненным здесь в виде пневматического амортизатора 44, так что установленный на управляющем рычаге 36 ролик 43 прижимается к кулачковому диску 45. Окружная периферия кулачкового диска 45 содержит два идентичных сектора 50, каждый из которых занимает половину диска. Кулачковый диск кинематически соединен карданным валом 46 с главным передаточным механизмом 4.
В изображении по фиг.1 выходной вал 24 главного передаточного механизма 4 заслонен телескопической тягой 29, один конец которой шарнирно прикреплен к управляющему рычагу 36, а другой к приводимому выходным валом 24 кривошипу 25 привода поршня. Кривошип 25 с помощью шатуна 26 приводит прессовальный поршень 3 в возвратно-поступательное движение.
Когда телескопическая тяга 29 находится в плавающем положении без фиксации ее длины, движение ее конца, взаимодействующего с кривошипом 25 привода поршня, не оказывает никакого влияния на управляющий рычаг 36. Таким образом, его положение определяется только ориентацией кулачкового диска 45, в который упирается ролик 43, подпружиненный пневматическим амортизатором 44. Кулачковый диск 45 вращается с той же частотой, что и выходной вал 24, так что ролик 43 в процессе одного колебательного хода прессовального поршня 3 проходит по всей окружной периферии кулачкового диска 45 и при этом вызывает два цикла поворота управляющего рычага 36.
Кривошип 40 упаковщика также вращается с двойной частотой прессовального поршня 3, то есть кривошип 40 упаковщика и кулачковый диск 45 вращаются в фиксированном соотношении фаз относительно друг друга. Ориентация, которую рычаг 15 упаковщика принимает в определенной фазе этого движения, зависит от по существу преднамеренно запроектированного контура кулачкового диска 45. Это обеспечивает возможность путем соответствующей установки этого контура точно управлять траекторией 47, которую грабельные зубья 13 описывают в процессе хода сбора.
Невозможно однозначно задать правило формообразования окружной периферии кулачкового диска 45, чтобы гарантировать идеальную траекторию 47, так как она зависит не только от контура кулачкового диска 45, но также от конфигурации и относительных фаз движения других компонентов механизмы упаковщика, таких как соединительная тяга 37, рычаг 15 упаковщика и кривошипа 40 упаковщика. Однако очевидно, что независимо от влияния этих компонентов линия траектории 47 может быть оптимизирована посредством соответствующего формообразования кулачкового диска 45, так как при задании формы кулачкового диска кроме желаемой линии траектории 47 по существу не нужно учитывать никаких граничных условий.
Так, за счет использования кулачкового диска 45 можно, в частности, добиться такой траектории, при которой грабельные зубья на входе 11 подающего канала 7 входят в него по существу перпендикулярно его продольному направлению, затем их вершины на длинном участке пути проходят в непосредственной близости к днищу 17, а далее движение резко меняет направление, и грабельные зубья 13 вновь удаляются из подающего канала 7 наружу. За счет крутого входа грабельных зубьев во вход 11 обеспечивается захват поступившей убранной массы по существу по всему поперечному сечению подающего канала 7 и ее сдвиг в подающий канал. Благодаря тому что грабельные зубья 13 движутся в направлении к выходу 12 в непосредственной близости к днищу 8, они предотвращают скопление на днище 8 неуплотненного материала и обеспечивают равномерную плотность массы убранного материала во всем подающем канале. Контур кулачкового диска 45 определяет также, в каком месте 48 подающего канала 7 грабельные зубья 13 вновь выходят наружу, а это определяет размеры формируемого тела предварительно уплотненной убранной массы за местом 48 выхода грабельных зубьев. Таким образом, достаточно изменить форму кулачкового диска 45, чтобы изменить размеры тела убранной массы и привести их в соответствие с размерами прессовальной камеры 2, чтобы получить в ней прессованные кипы равномерной плотности.
Число ходов сбора, которое требуется для предварительного формирования в подающем канале 7 порции убранной массы, имеющей плотность, необходимую для дальнейшей загрузки в прессовальную камеру 2, различно в зависимости от количества убранной массы, подаваемой подборщиком. Поэтому для определения готовности порции убранной массы вблизи выхода 12 расположена поворотная заслонка 23, на которую напирает убранная масса, подаваемая ходами упаковщика. Когда давление убранной массы на заслонку 23 переходит предельную величину, порция убранной массы готова и заслонка 23 поворачивается, освобождая путь в прессовальную камеру 2. При этом одновременно телескопическая тяга 29 фиксируется в положении минимальной длины. Вследствие этого при последующем вращении кривошипа 25 привода поршня телескопическая тяга 29 поворачивает управляющий рычаг 36 по часовой стрелки против действия пневматической пружины 44 и ролик 43 отходит от кулачкового диска 45. При этом рычаг 15 упаковщика поворачивается по часовой стрелке вокруг оси 39, и это в сочетании с вращением кривошипа 40 упаковщика имеет следствием то, что грабельные зубья 13 следуют по днищу 8 почти по всей его длине, как это показано на фиг.1 траекторией 49. Затем, после того как они задвинули порцию убранной массы в прессовальную камеру 2, грабельные зубья 13 выходят из подающего канала 7 на высоте выхода 12.
Каждый из образующих окружную периферию кулачкового диска 45 секторов 50 может иметь участок такой формы, что ролик 43 остается в контакте с этим участком, когда телескопическая тяга 29 фиксируется по длине. Во время прохода роликом 23 этого участка обратный ход грабельных зубьев остается одинаковым независимо от того, выполняется ли ход сбора или ход загрузки. Когда проход по этому участку совершается в то время, когда грабельные зубья 13 находятся в передней области подающего канала, их траектория движения в этой передней области совершенно одинакова, а за счет соответствия формы днища 8 этой траектории может обеспечиваться эффективная подача при выполнении ходов обоих видов.
Перечень ссылочных обозначений на чертежах
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ПОРШНЕВОЙ ПРЕСС | 2011 |
|
RU2488988C2 |
| Загрузочное устройство для подачи материала в камеру прессования | 1986 |
|
SU1584814A1 |
| УСТРОЙСТВО для ПОДАЧИ ПРЕССУЕМОГО МАТЕРИАЛА: СЕНА, СОЛОМЫ И Т. П. В ПРЕССЫ С КАЧАЮЩИМСЯ ПОРШНЕМ | 1965 |
|
SU169927A1 |
| СЦЕПКА ИЗ ТЯГАЧА И СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕСС-УПАКОВЩИКА | 2014 |
|
RU2652151C2 |
| МАШИНА ДЛЯ ПРЕССОВАНИЯ ТЮКОВ С ВЯЗАЛЬНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2464769C2 |
| Устройство для подачи массы в пресс-подборщике | 1973 |
|
SU476722A3 |
| Пресс-подборщик | 1987 |
|
SU1501971A1 |
| Выключающее приспособление к поршневому прессу | 1960 |
|
SU143616A1 |
| Подборщик лент льна | 1990 |
|
SU1794377A1 |
| ОБВЯЗОЧНОЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕССА ДЛЯ ФОРМИРОВАНИЯ КРУПНЫХ ТЮКОВ | 2009 |
|
RU2419279C1 |
Изобретение относится к сельскохозяйственному машиностроению. Сельскохозяйственный поршневой пресс содержит подающий канал и прессовальную камеру, в которой установлен с возможностью колебательного движения прессовальный поршень. В подающем канале расположен упаковщик с возможностью переключения между ходом сбора, уплотняющим убранную массу в подающем канале, и ходом загрузки убранной массы из подающего канала в прессовальную камеру. Привод упаковщика содержит управляющий рычаг, который для управления, по меньшей мере, одним из ходов упаковщика взаимодействует с регулируемым упором. Движение упаковщика, при котором управляющий рычаг взаимодействует с регулируемым упором, является движением хода сбора. Благодаря возможности настройки траекторий движения упаковщика повышается эффективность работы пресса. 8 з.п. ф-лы, 2 ил.
1. Сельскохозяйственный поршневой пресс (1), содержащий прессовальную камеру (2), в которой установлен с возможностью колебательного движения прессовальный поршень (3), и подающий канал (7), в котором упаковщик (13) может двигаться с возможностью переключения между ходом сбора, уплотняющим убранную массу в подающем канале (7), и ходом загрузки убранной массы из подающего канала (7) в прессовальную камеру (2), причем привод упаковщика (13) содержит управляющий рычаг (36), который для управления, по меньшей мере, одним из ходов упаковщика взаимодействует с регулируемым упором (45), отличающийся тем, что движение упаковщика (13), при котором управляющий рычаг (36) взаимодействует с регулируемым упором (45), является движением хода сбора.
2. Сельскохозяйственный поршневой пресс по п.1, отличающийся тем, что регулируемый упор выполнен в виде приводимого во вращение кулачкового диска (45).
3. Сельскохозяйственный поршневой пресс по п.2, отличающийся тем, что на управляющем рычаге (36) установлен ролик (43) для упора в кулачковый диск (45).
4. Сельскохозяйственный поршневой пресс по п.2 или 3, отличающийся тем, что частота движения упаковщика (13) составляет n-кратную величину частоты движения прессовального поршня (3), а вращающийся с частотой движения прессовального поршня кулачковый диск (45) содержит число секторов (50), равное n.
5. Сельскохозяйственный поршневой пресс по любому из пп.1-3, отличающийся тем, что регулируемый упор (45) вызывает движение управляющего рычага (36) с периодичностью движения упаковщика (13).
6. Сельскохозяйственный поршневой пресс по любому из пп.1-3, отличающийся тем, что управляющий рычаг (36) прижимается к регулируемому упору (45) посредством упругого элемента (44).
7. Сельскохозяйственный поршневой пресс по п.1, отличающийся тем, что содержит соединительный элемент (29), который, по меньшей мере, в течение части хода загрузки удерживает управляющий рычаг (36) отведенным от упора (45).
8. Сельскохозяйственный поршневой пресс по п.7, отличающийся тем, что соединительный элемент (29) выполнен в виде телескопической тяги (29), которая может переводиться из состояния переменной длины, в котором она не преодолевает усилия упругого элемента (44), в состояние фиксированной длины, в котором она передает на управляющий рычаг (36) достаточное усилие для преодоления усилия упругого элемента (44).
9. Сельскохозяйственный поршневой пресс по п.7 или 8, отличающийся тем, что соединительный элемент (29) приводится приводным валом (24) прессовального поршня (3).
| DH 10360598 A1, 28.07.2005 | |||
| DE 20104700 U1, 13.06.2001 | |||
| Ротор асинхронного двигателя | 1957 |
|
SU114331A1 |
| Загрузочное устройство для подачи материала в камеру прессования | 1986 |
|
SU1584814A1 |
| Загрузочное устройство для подачи материала в камеру прессования | 1984 |
|
SU1215640A1 |

