Изобретение относится к области антенных измерений и может быть использовано для высокоточного определения местоположения и мощностей источников излучения однопозиционной активной или пассивной локационной системой.
Под местоположением источников излучения понимается пространственное положение источников в заданной системе координат. Определение местоположений источников излучения является классической задачей радиолокации. Дополнительное определение еще и их мощностей расширяет информативность получаемых данных и может быть использовано, например, для идентификации наблюдаемых объектов.
Известен дальномерно-пеленгационный способ определения местоположения источников излучения (аналог) [1] с помощью однопозиционной локационной станции. Этот способ заключается в раздельном определении направления на источник излучения и его наклонной дальности. В результате решения первой задачи определяется линия положения - прямая в пространстве, указывающая направление на источник. В результате решения второй задачи определяется поверхность положения - сфера с центром в точке измерений, радиус которой равен наклонной дальности источника. Местоположение источника определяют как точку пересечения прямой и сферы.
Дальномерно-пеленгационный способ обладает следующими недостатками.
1) Он может быть реализован только в активной локационной системе, работающей по принципу излучения зондирующего сигнала и последующего приема этого сигнала, отраженного объектом наблюдения (источником отраженного излучения). Необходимость активной системы обусловлена тем, что определение дальности основано на сопоставлении отраженного сигнала с излученным. В то же время, в ряде случаев желательно применять пассивные локационные станции, работающие только на прием излучения источника.
2) Для однозначного определения дальности источника излучения по задержке зондирующего сигнала необходимо предварительное обнаружение источника с грубой оценкой его местоположения. Это требует соответствующих аппаратурных и временных затрат.
3) Дальномерно-пеленгационный способ не позволяет оценивать мощности источников излучения.
Известен способ определения местоположений и мощностей источников излучения с помощью однопозиционной локационной станции {прототип) [2], свободный от перечисленных недостатков.
Способ-прототип заключается в следующем. Контролируемую область пространства разбивают на малые объемы - элементы разрешения по местоположению, нумеруют их и фиксируют местоположение каждого элемента разрешения, например, с помощью координатных векторов 






Способ-прототип позволяет определять не только местоположения, но и мощности источников излучения однопозиционной локационной станцией. При этом, в отличие от аналога, он не требует ни проведения измерений, связанных с определением наклонной дальности источника, ни предварительной оценки этой дальности.
Недостатком прототипа является сложность организации измерений: необходимо измерять выходную мощность приемной антенны при различных априори заданных направлениях оси ДН, что требует специального управления антенной системой, формирования ДН и временных затрат на это.
Технической задачей данного изобретения является упрощение измерений и сокращение времени, требуемого для них, а также повышение информативности получаемых данных об источниках излучения.
Поставленная задача достигается тем, что в способе определения местоположений и мощностей источников излучения с помощью однопозиционной локационной станции, заключающемся в том, что контролируемую область пространства разбивают на малые объемы - элементы разрешения по местоположению, нумеруют их и фиксируют местоположение каждого элемента разрешения, например, с помощью координатных векторов 




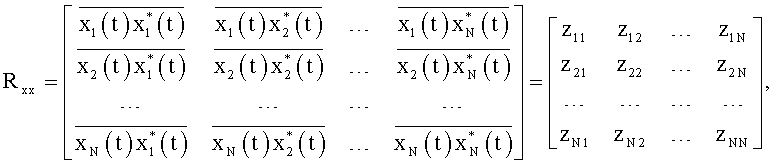
где xi - сигнал на входе i-го элемента AP, индекс * обозначает комплексное сопряжение, верхняя черта обозначает усреднение, zmi обозначает соответствующий элемент матрицы, для всех компонент матрицы Rxx составляют уравнения вида 


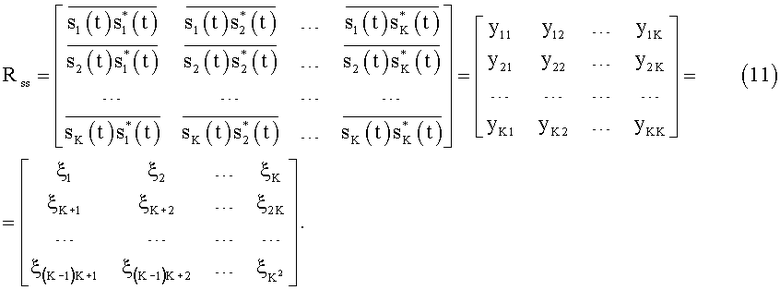
где si(t) - сигнал источника в i-м элементе разрешения, причем в случае отсутствия источника в этом элементе разрешения si(t)=0, формируют из составленных уравнений векторно-матричное уравнение измерений 





Поставленная задача решается за счет того, что заявляемый способ строится на измерениях корреляционной матрицы принимаемых элементами AP сигналов вместо измерений мощности при различных направлениях ДН антенны, как это делается в прототипе. Таким образом, из способа вообще исключается необходимость формирования ДН, не требуется управление этой ДН, изменение ее направлений, за счет чего упрощается проведение измерений и сокращается время измерений. Повышение информативности получаемых данных об источниках излучения происходит за счет получения оценки корреляционной матрицы излучений элементов разрешения Rss, которая содержит информацию о взаимных корреляционных свойствах источников в виде недиагональных компонент.
Обоснование способа.
Разобьем контролируемую область пространства на малые объемы - элементы разрешения по местоположению, пронумеруем их и определим координаты каждого элемента разрешения, например координаты их центров. Обозначим эти координаты трехмерными координатными векторами 


Определим для каждого элемента разрешения контролируемой области пространства коэффициент ослабления сигнала за счет пространственного распространения от этого элемента разрешения до приемной антенны. Будем полагать, что контролируемая область пространства находится в дальней зоне антенны. Тогда приходящий на апертуру приемной антенны сигнал из любого элемента разрешения будет иметь плоский волновой фронт на всей апертуре, а коэффициент пространственного ослабления сигнала можно считать одинаковым для всей апертуры приемной AP.
В первом приближении коэффициент пространственного ослабления сигнала, приходящего на AP из k-го элемента разрешения, определяется [3] соотношением 


Определим также для каждого элемента разрешения временные интервалы распространения сигнала от этого элемента разрешения до каждого элемента AP. Время распространения связано с фазовым набегом, поэтому его необходимо учитывать с точностью до элемента AP.
Для k-го элемента разрешения время распространения сигнала от него до базового (первого) элемента AP составит
где νc - скорость распространения сигнала в пространстве.
Распространение сигнала по апертуре AP приводит к дополнительной временной задержке. Чтобы ее найти, обозначим координаты элементов AP векторами 




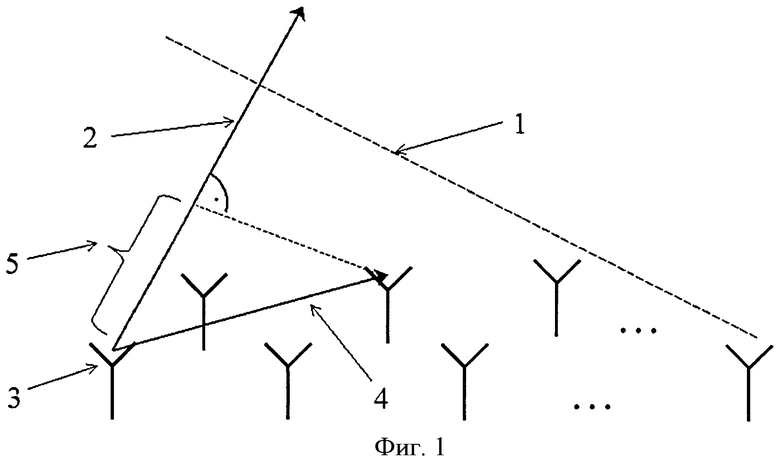
Искомая временная задержка распространения сигнала между 1-м и n-м элементами AP определяется пространственным набегом 5 на фиг.1, который обозначим ln. Величина ln равна проекции вектора 

Временной интервал распространения сигнала от k-го элемента разрешения контролируемой области пространства до n-го элемента приемной AP получим, просуммировав (1) и (2):

Пусть в k-м элементе разрешения находится источник излучения, сигнал которого описывается функцией

где Ak - амплитуда, φk0 - начальная фаза, ω - несущая частота сигнала.
Тогда с учетом интервала распространения (3) на входе n-го элемента AP сигнал от k-то источника будет определяться выражением

Объединим сомножители в правой части (4), описывающие преобразование сигнала за счет пространственного распространения, в коэффициент пространственного преобразования сигнала

и перепишем (4) в виде

Запишем суммарный сигнал на входе n-го элемента AP от всех источников излучения, находящихся в контролируемой области пространства. Для этого просуммируем сигналы (6) по всем элементам разрешения:

где 

Запишем входные сигналы на всех элементах AP аналогично (7)
и полученную систему уравнений перепишем в векторно-матричной форме:

где 

Запишем теперь выражение для пространственной корреляционной матрицы принимаемых сигналов. С учетом (8) получим

где 
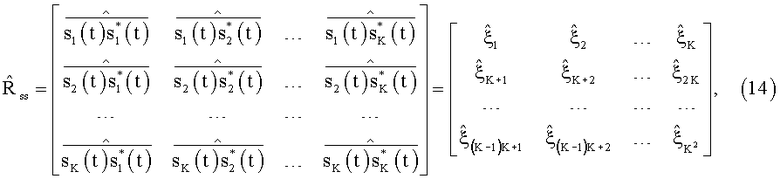
Измерим пространственную корреляционную матрицу принимаемых сигналов Rxx и по компонентам этой измеренной матрицы найдем компоненты корреляционной матрицы излучений элементов разрешения Rss. Для этого обозначим следующим образом компоненты измеренной пространственной корреляционной матрицы принимаемых сигналов и корреляционной матрицы излучений элементов разрешения:
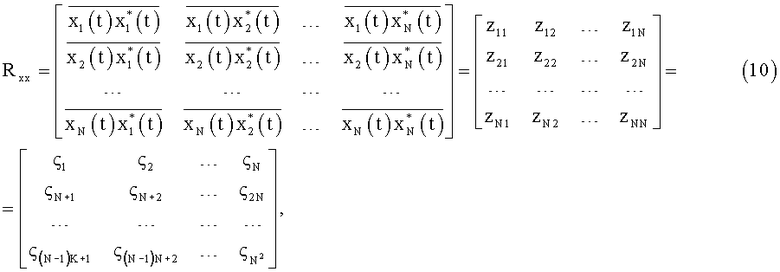
Для всех компонент матрицы Rxx запишем уравнения исходя из выражения (9) и структур матриц (10) и (11)

где m - номер строки, i - номер столбца матрицы Rxx, ςµ=zmi, µ=(m-1)N+i, ξυ=ykl, υ=(k-1)K+l, 


Найдем оценку вектора 

и полученную систему уравнений представим в виде векторно-матричного уравнения измерений

где 

Из уравнения (13) найдем оценку вектора 


где Rξξ и Rnm - корреляционные матрицы соответственно измеряемых величин и ошибок измерений.
При отсутствии данных о вероятностных характеристиках измеренных величин и ошибок измерений более грубую оценку можно найти из уравнения (13) методом псевдообращения [5]:

где индекс + обозначает операцию псевдообращения матрицы.
Сформируем из компонент оценки вектора 
где ^ обозначает оценку соответствующей величины.
Определим мощности и местоположения источников излучения по компонентам главной диагонали полученной матрицы 

Это дает решение задачи определения местоположений и мощностей источников излучения: по значениям диагональных элементов можно выявить те элементы разрешения, в которых находятся источники, например, по максимумам в распределении значений оценок мощностей по элементам разрешения. Номера выявленных элементов разрешения определяют координаты, т.е. местоположения источников в виде априори определенных координатных векторов этих элементов разрешения.
Дополнительно матрица (14) позволяет получить характеристики взаимной корреляции сигналов источников. Действительно, выявив номера элементов разрешения, в которых находятся источники, например - i-й и j-й элементы, найдем взаимную корреляцию сигналов этих источников в виде компоненты на пересечении i-й строки и j-го столбца (или наоборот) матрицы 
Преимущества предлагаемого способа по сравнению с прототипом следующие.
1. Упрощение измерений, поскольку заявляемый способ позволяет обходиться без сканирования пространства направленной антенной.
2. Сокращение времени измерений, поскольку в заявляемом способе отсутствует необходимость проведения измерений при каждом из априори определенных и установленных при измерениях направлений оси ДН. Вместо этого одномоментно измеряется пространственная корреляционная матрица принимаемых сигналов.
3. Повышение информативности, поскольку заявляемый способ позволяет определять не только местоположения и мощности источников излучения, но и оценивать взаимно-корреляционные характеристики сигналов источников.
Источники информации
1. Сайбелъ А.Г. Основы радиолокации. - М.: Советское радио, 1961, с.15-17 (аналог).
2. Патент №2444740, опубликован 10.03.2012, Бюл. №7 (протопип).
3. Сайбель А.Г. Основы радиолокации. - М.: Советское радио, 1961, с.33-34.
4. Самойленко В.И., Пузырев В.А., Грубрин И.В. Техническая кибернетика: Учеб. пособие. - М.: Изд-во МАИ, 1994, с.130-132.
5. Гантмахер Ф.Р. Теория матриц. 4-е изд. - М.: Наука. Гл. ред. физ.-мат. лит., 1988, с.35.
Предлагаемый способ позволяет определять местоположения и мощности источников излучения по измеренной пространственной корреляционной матрице принимаемых сигналов на апертуре приемной антенной решетки (AP). Достигаемый технический результат - упрощение измерений и сокращение времени измерений за счет исключения операции формирования диаграммы направленности антенны в заданных направлениях, а также повышение информативности получаемых данных за счет оценивания взаимно-корреляционных характеристик сигналов источников. Способ заключается в разбиении контролируемой области пространства на элементы разрешения по местоположению, определении коэффициентов ослабления сигналов за счет распространения от каждого элемента разрешения до приемной AP 




Способ определения местоположений и мощностей источников излучения однопозиционной локационной станцией,
заключающийся в том, что контролируемую область пространства разбивают на малые объемы-элементы разрешения по местоположению, нумеруют их и фиксируют местоположение каждого элемента разрешения, например, с помощью координатных векторов 


элементов разрешения в контролируемой области пространства, отличающийся тем, что априорно до проведения измерений определяют коэффициенты ослабления сигналов за счет распространения от каждого элемента разрешения контролируемой области пространства до приемной антенной решетки (AP) локационной станции 

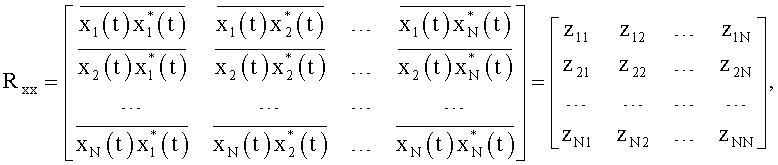
где xi - сигнал на входе i-го элемента AP, индекс * обозначает комплексное сопряжение, верхняя черта обозначает усреднение, Zmi обозначает соответствующий элемент матрицы, для всех компонент матрицы Rxx составляют уравнения вида 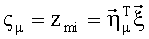


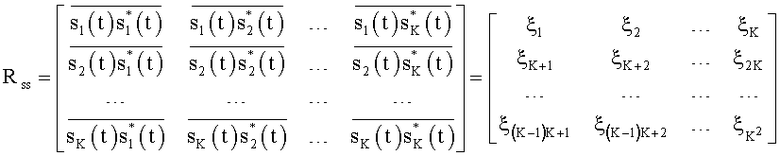
где si(t) - сигнал источника в i-м элементе разрешения, причем в случае отсутствия источника в этом элементе разрешения si(t)=0 формируют из составленных уравнений векторно-матричное уравнение измерений 



| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И МОЩНОСТЕЙ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 2011 |
|
RU2444740C1 |
| Сборная железобетонная крепь для горных выработок | 1957 |
|
SU112446A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАТИВНЫХ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК РАДИОСИГНАЛОВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2251803C1 |
| Машина для мытья, сушки и подготовки шерсти к дальнейшей обработке | 1944 |
|
SU67279A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ШИРИНЫ ФУНКЦИИ РАССЕЯНИЯ СРЕДЫ | 2001 |
|
RU2204844C2 |
| US 6051967 A, 18.04.2000 | |||
| WO 2011022197 A1, 24.02.2011 | |||
| WO 2005073752 A1, 11.08.2005 | |||
| ХИМИЧЕСКИЙ ИСТОЧНИК ТОКА | 1991 |
|
RU2030029C1 |

