Изобретение относится к области антенных измерений и может быть использовано для высокоточного определения местоположения и мощностей источников излучения однопозиционной активной или пассивной локационной системой.
Под местоположением источников излучения понимается пространственное положение источников в заданной системе координат. Определение местоположения источников излучения в контролируемой области пространства является основной задачей радиолокации. Определение мощностей источников излучения, также входящее в задачу заявляемого способа, весьма полезно в ряде приложений, например, в задаче идентификации.
Под источниками излучения будем понимать как источники собственного излучения, так и источники переизлучения (отраженного объектом излучения). Под приемной антенной будем понимать как антенну, работающую только на прием сигналов, так и приемо-передающую антенну в режиме приема сигналов.
Известны способы определения местоположения источников излучения, основанные на обработке сигналов, принимаемых направленной антенной или антеннами. Местоположение источника определяется как точка пересечения линий его положения или линии и поверхности положения, определенных с помощью этих антенн. При этом используют ту или иную комбинацию решения двух независимых задач - определения направления на источник и определение его дальности.
Так, в пеленгационном способе для определения местоположения источника определяют из двух разнесенных в пространстве точек направления на этот источник и местоположение источника получают как точку пересечения в пространстве двух прямых, соответствующих найденным направлениям.
Недостатком этого способа является невозможность во многих случаях использовать двухпозиционную систему, включающую две пространственно разнесенные станции пеленгации, причем разнесенные на достаточно большое расстояние для обеспечения приемлемой точности. По этой причине пеленгационный способ определения местоположения используется, как правило, только в системах навигации.
Наиболее близким к заявляемому способу является дальномерно-пеленгационный способ определения местоположения источников излучения (прототип) [1]: он применим в однопозиционных локационных системах, т.е. позволяет определять местоположение источников из одной точки, с использованием одной антенны. Согласно [1], прототип является единственным известным способом, позволяющим однозначно определять местоположение источника из одной точки, т.е. однопозиционной локационной станцией. Таким же свойством обладает и заявляемый способ, однако основаны заявляемый способ и прототип на разных принципах.
Способ-прототип заключается в раздельном определении направления на источник излучения и его наклонной дальности. В результате решения первой задачи определяется линия положения - прямая в пространстве, указывающая направление на источник. В результате решения второй задачи определяется поверхность положения - сфера с центром в точке измерений, радиус которой равен наклонной дальности источника. Местоположение источника определяют как точку пересечения прямой и сферы.
При этом, если для определения направлений на источники достаточно измерений мощности на выходе приемной антенны, то для определения дальностей источников необходимы специальные измерительные схемы, которые, в зависимости от принципа действия, измеряют либо запаздывание фазы монохроматического излучения при использовании фазового метода дальнометрии [2], либо частоту биений при частотном методе [3], либо время запаздывания зондирующего импульса в импульсной дальнометрии [4].
Способ-прототип обладает следующими недостатками.
1) Он может быть реализован только в активной локационной системе, работающей по принципу излучения зондирующего сигнала и последующего приема этого сигнала, отраженного объектом наблюдения (источником отраженного излучения). Необходимость активной системы обусловлена тем, что все известные способы определения дальности основаны на сопоставлении отраженного сигнала с излученным. В то же время, в ряде случаев желательно применять пассивные локационные станции, работающие только на прием излучения источника.
2) Для реализации прототипа необходимы достаточно сложные измерения запаздывания фазы, частоты биений или запаздывания зондирующего импульса и соответствующая измерительная аппаратура.
3) Для однозначного определения дальности источника излучения по задержке зондирующего сигнала необходимо предварительное обнаружение источника с грубой оценкой его местоположения. Это требует соответствующих аппаратурных и временных затрат.
4) Прототип, как и другие методы определения местоположения источников излучения, не включает оценивание мощностей их излучения, которые представляют собой важную информацию для ряда прикладных задач.
Технической задачей данного изобретения является расширение области применения способа определения местоположения источников излучения на пассивные однопозиционные локационные системы, упрощение измерений, сокращение измерительной аппаратуры, уменьшение времени оценивания, а также получение информации о мощностях источников излучения.
Поставленная задача достигается тем, что контролируемую область пространства разбивают на малые объемы - элементы разрешения по местоположению, нумеруют их и фиксируют местоположение каждого элемента разрешения, например, с помощью координатных векторов r1, r2, …, rN, где N - число элементов разрешения в контролируемой области пространства, определяют коэффициенты усиления по мощности, создаваемые приемной антенной для каждого элемента разрешения при множестве априорно выбранных направлений оси ее диаграммы направленности (ДН) е1, е2, …, eK, где ej - направляющий вектор оси ДН, К - число выбранных направлений оси ДН, формируют из полученных коэффициентов усиления матрицу усилений
где wi(ej) - коэффициент усиления по мощности, создаваемый антенной при приеме излучения из i-го элемента разрешения при направлении оси ее ДН ej, устанавливают априорно выбранные направления оси ДН приемной антенны е1, е2, …, eK и измеряют при каждом направлении мощность на выходе приемной антенны р1, р2, …pK, находят оценку  вектора мощностей источников f исходя из уравнения измерений р=Wf+n, где р=[р1р2…рК]T - вектор измерений мощности на выходе приемной антенны, n - вектор ошибок измерений, индекс Т обозначает транспонирование, f - вектор, число компонент которого равно числу элементов разрешения N, причем i-я компонента равна нулю, если в i-м элементе разрешения нет источника излучения, и равна мощности источника излучения, если он в i-м элементе разрешения есть, определяют местоположение и мощности источников излучения по оценке вектора мощностей источников , в котором значение каждой компоненты есть оценка мощности источника излучения, находящегося в элементе разрешения, номер которого равен номеру этой компоненты.
вектора мощностей источников f исходя из уравнения измерений р=Wf+n, где р=[р1р2…рК]T - вектор измерений мощности на выходе приемной антенны, n - вектор ошибок измерений, индекс Т обозначает транспонирование, f - вектор, число компонент которого равно числу элементов разрешения N, причем i-я компонента равна нулю, если в i-м элементе разрешения нет источника излучения, и равна мощности источника излучения, если он в i-м элементе разрешения есть, определяют местоположение и мощности источников излучения по оценке вектора мощностей источников , в котором значение каждой компоненты есть оценка мощности источника излучения, находящегося в элементе разрешения, номер которого равен номеру этой компоненты.
Особенностью заявляемого способа является возможность по одним лишь измерениям мощности на выходе приемной антенны пассивной или активной однопозиционной локационной станции определить местоположение источников излучения (или переизлучения) с точностью размера элемента разрешения, а также оценить мощности источников.
Обоснование способа.
Разобьем контролируемую область пространства на маленькие объемы - элементы разрешения по местоположению. Пронумеруем их и зафиксируем местоположение каждого элемента разрешения, например, с помощью координатных векторов их центров r1, r2, …, rN, где N - число элементов разрешения в контролируемой области пространства. Качественно такое разбиение представлено на фиг.1, где 1 - контролируемая область пространства, в которой показаны некоторые из элементов разрешения, на которые она разбита. Местоположения элементов разрешения задаются координатными векторами 2 с началом в точке базирования приемной антенны 3.
Определим коэффициенты усиления по мощности, создаваемые приемной антенной для каждого элемента разрешения. Это можно сделать экспериментально или по известной ДН. Определим такие коэффициенты усиления при множестве выбранных априори направлений оси ДН е1, е2, …, eK, где ei - направляющий вектор оси ДН, К - число выбранных направлений. При этом ДН должна быть достаточно широкоугольной, чтобы, по возможности, охватывать большую часть контролируемой области пространства.
Обозначим коэффициенты усиления, создаваемые антенной при j-м направлении оси ДН w1(ej), w2(ej), …wN(ej) и составим из полученных коэффициентов усиления вектор усилений

где индекс Т обозначает транспонирование.
Векторы усилений (1), полученные для всех К выбранных направлений оси ДН w(e1), w(e2), …w(eK), представляют собой априорную информацию, необходимую для реализации заявляемого способа. Эта информация определяется направленными свойствами антенны и выбранными направлениями оси ДН, которые будут затем устанавливаться при проведении измерений. Заметим, что вся априорная информация может быть получена заранее, до начала измерений, при практически неограниченном времени на ее получение.
Найдем выражение, определяющее выходную мощность приемной антенны при направлении оси ее ДН ej. Если в контролируемой области пространства находится только один источник излучения, расположенный в i-м элементе разрешения и мощность этого источника fi, то мощность на выходе приемной антенны определится выражением
p(ej)=fiwi(ej).
В общем случае источников в контролируемой области пространства может быть несколько. Для определения в общем случае выходной мощности антенны составим вектор мощностей источников

в котором число компонент равно числу элементов разрешения по местоположению в контролируемой области пространства. Значения компонент вектора (2) определим следующим образом: если в i-м элементе разрешения источника нет, то fi=0. Если же источник в i-м элементе разрешения есть, то компонента fi равна мощности этого источника.
С учетом значений компонент векторов (1) и (2), в общем случае произвольного числа источников, выходная мощность приемной антенны при направлении оси ее ДН ej определится выражением

Перейдем теперь к процессу измерений. Будем устанавливать ДН антенны в ранее выбранных направлениях е1, е2, …, eK и при каждом таком направлении оси ДН измерять мощность на выходе приемной антенны. Эти измерения, согласно (3), связаны с вектором мощностей источников f соотношениями
где введены обозначения wi=w(ei) и pi=p(ei).
В системе уравнений (4) известны измеренные мощности на выходе антенны p1, p2, …, pK, а также векторы усилений w1, w2, …,wK, которые представляют собой ранее определенную априорную информацию. Неизвестным является вектор мощностей источников f. Задача определения местоположения и мощностей источников излучения состоит в нахождении этого вектора. Действительно, каждая его компонента дает информацию о мощности источника, расположенного в элементе разрешения, номер которого равен номеру компоненты (если источника в этом элементе разрешения нет, то соответствующая компонента вектора f равна нулю).
Таким образом, задача свелась к нахождению вектора мощностей источников из системы уравнений (4). Для ее решения введем в рассмотрение вектор измерений

и матрицу усилений
С учетом (5) и (6) запишем систему уравнений (4) в виде векторно-матричного уравнения

С учетом ошибок измерений выходной мощности приемной антенны, уравнение (7) приобретает вид уравнения измерений

где n - вектор ошибок измерений мощности на выходе приемной антенны.
Уравнение (8) позволяет оценить вектор мощностей источников f. Это можно сделать разными известными методами. Так, метод винеровского оценивания [5] дает искомую оценку в виде выражения

где Rff и Rnn - ковариационные матрицы, соответственно, сигналов и ошибок измерений.
При отсутствии данных о вероятностных характеристиках сигналов и ошибок измерений, более грубую оценку можно найти из уравнения (7) методом псевдообращения [6]:

где индекс + обозначает псевдообратную матрицу.
Полученная оценка вектора мощностей источников  представляет собой оценку распределения источников излучения по элементам разрешения: каждая отличная от нуля компонента есть оценка мощности источника, расположенного в элементе разрешения с номером этой компоненты. Полученное распределение позволяет определить положение источников в контролируемой области пространства с точностью до размера элемента разрешения, который выбирается априори из соображений требуемых точности и разрешения.
представляет собой оценку распределения источников излучения по элементам разрешения: каждая отличная от нуля компонента есть оценка мощности источника, расположенного в элементе разрешения с номером этой компоненты. Полученное распределение позволяет определить положение источников в контролируемой области пространства с точностью до размера элемента разрешения, который выбирается априори из соображений требуемых точности и разрешения.
Преимущества предлагаемого способа по сравнению с прототипом следующие.
1. Заявляемый способ обладает большей универсальностью, поскольку позволяет определять местоположение источников излучения не только с помощью активной (как прототип), но и с помощью пассивной однопозиционной локационной системы.
2. Существенно упрощается процедура измерений: уменьшается число измеряемых величин и, соответственно, сокращается необходимая для измерений аппаратура. Действительно, в прототипе необходимо измерять мощность на выходе приемной антенны для определения направлений на источники, а также с использованием специальных схем - задержку фазы, частоту биений или запаздывание импульса для определения дальностей источников. В заявляемом способе единственными измерениями являются измерения мощности на выходе приемной антенны.
3. В заявляемом способе отсутствует режим поиска с грубым предварительным оцениванием местоположения источников, которое необходимо в прототипе для однозначного определения дальности. Это сокращает время определения местоположения источников.
4. Поскольку в заявляемом способе используется широкоугольная ДН, появляется возможность применять антенны значительно меньших размеров, чем в прототипе, при одинаковой точности оценивания местоположения источников, что расширяет возможности применения способа. Это происходит потому, что в прототипе точность определяется шириной ДН, а в заявляемом способе - размером элемента разрешения.
5. Заявляемый способ является более информативным, чем прототип, поскольку, помимо местоположения источников излучения, определяет также их мощности.
Источники информации.
1. Сайбель А.Г. Основы радиолокации. - М., «Советское радио», 1961, с.15-17.
2. Бакулев П.А. Радиолокационные системы. - М., «Радиотехника», 2007, с.242-246.
3. Бакулев П.А. Радиолокационные системы. - М., «Радиотехника», 2007, с.246-252.
4. Бакулев П.А. Радиолокационные системы. - М., «Радиотехника», 2007, с.252-263.
5. Самойленко В.И., Пузырев В.А., Грубрин И.В. Техническая кибернетика: Учеб. пособие. - М.: Изд-во МАИ, 1994, c.130-132.
6. Гантмахер Ф.Р. Теория матриц. 4-е изд. - М.: Наука. Гл. ред. физ.-мат. лит., 1988, с.35.
Способ определения местоположения и мощностей источников излучения позволяет по измеренной мощности на выходе приемной антенны однопозиционной локационной станции определять местоположение и мощности источников излучения. Достигаемый технический результат - расширение области применения способа определения местоположения источников на пассивные однопозиционные локационные системы, упрощение измерений и повышение информативности за счет определения мощностей источников. Способ заключается в разбиении контролируемой области пространства на элементы разрешения по местоположению, определении коэффициентов усиления, создаваемых приемной антенной для каждого элемента разрешения при выбранных априори направлениях оси диаграммы направленности (ДН) антенны, формировании матрицы усилений
где wi(ej) - коэффициент усиления по мощности, создаваемый антенной при приеме излучения из i-го элемента разрешения при направлении оси ее ДН ej, измерении мощности на выходе антенны при выбранных априори направлениях оси ДН, оценивании вектора сигналов исходя из уравнения измерений p=Wf+n, где р - вектор измерений мощности, n - вектор ошибок измерений мощности на выходе приемной антенны, f - вектор мощностей источников, число компонент которого равно числу элементов разрешения, причем i-я компонента равна нулю, если в i-м элементе разрешения нет источника излучения, и равна мощности источника излучения, если он в i-м элементе разрешения есть, определении местоположения и мощностей источников излучения по оценке вектора мощностей источников. 1 ил.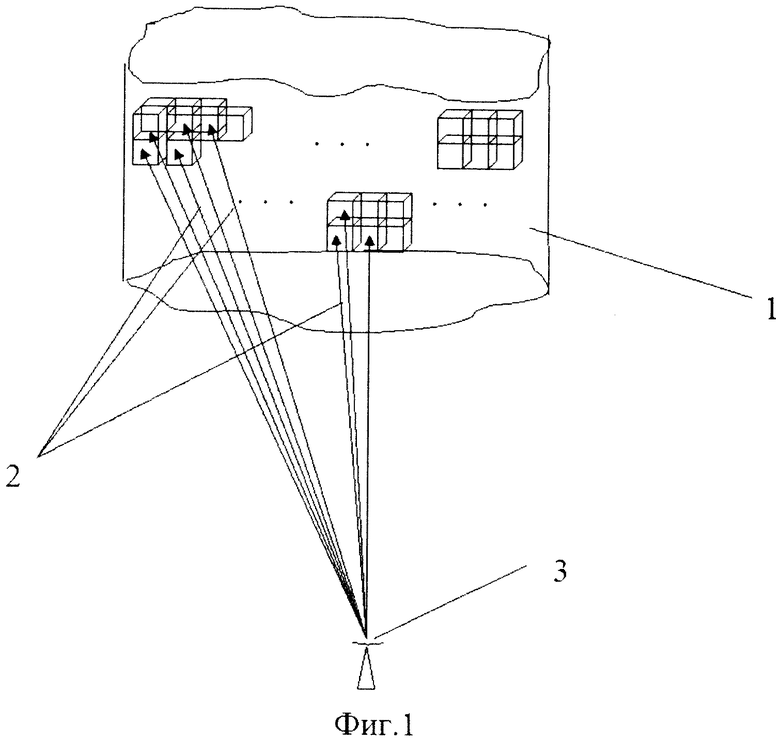
Способ определения местоположения и мощностей источников излучения, отличающийся тем, что контролируемую область пространства разбивают на малые объемы - элементы разрешения по местоположению, нумеруют их и фиксируют местоположение каждого элемента разрешения, например, с помощью координатных векторов r1, r2, …, rN, где N - число элементов разрешения в контролируемой области пространства, определяют коэффициенты усиления по мощности, создаваемые приемной антенной для каждого элемента разрешения при множестве априорно выбранных направлений оси ее диаграммы направленности (ДН) e1, е2, …, еK, где ej - направляющий вектор оси ДН, K - число выбранных направлений оси ДН, формируют из полученных коэффициентов усиления матрицу усилений
где wi(ej) - коэффициент усиления по мощности, создаваемый антенной при приеме излучения из i-го элемента разрешения при направлении оси ее ДН ej, устанавливают априорно выбранные направления оси ДН приемной антенны e1, е2, …, еK и измеряют при каждом направлении мощность на выходе приемной антенны p1, р2, … рK, находят оценку  вектора мощностей источников f исходя из уравнения измерений p=Wf+n, где p=[p1p2…pK]T - вектор измерений мощности на выходе приемной антенны, n - вектор ошибок измерений, индекс Т обозначает транспонирование, f - вектор, число компонент которого равно числу элементов разрешения N, причем i-я компонента равна нулю, если в i-м элементе разрешения нет источника излучения, и равна мощности источника излучения, если он в i-м элементе разрешения есть, определяют местоположение и мощности источников излучения по оценке вектора мощностей источников
вектора мощностей источников f исходя из уравнения измерений p=Wf+n, где p=[p1p2…pK]T - вектор измерений мощности на выходе приемной антенны, n - вектор ошибок измерений, индекс Т обозначает транспонирование, f - вектор, число компонент которого равно числу элементов разрешения N, причем i-я компонента равна нулю, если в i-м элементе разрешения нет источника излучения, и равна мощности источника излучения, если он в i-м элементе разрешения есть, определяют местоположение и мощности источников излучения по оценке вектора мощностей источников  в котором значение каждой компоненты есть оценка мощности источника излучения, находящегося в элементе разрешения, номер которого равен номеру этой компоненты.
в котором значение каждой компоненты есть оценка мощности источника излучения, находящегося в элементе разрешения, номер которого равен номеру этой компоненты.
| САЙБЕЛЬ Ф.Г | |||
| Основы радиолокации | |||
| - М.: Советское радио, 1961 | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЙ НА ИСТОЧНИКИ ИЗЛУЧЕНИЯ И УГЛОВОГО РАЗРЕШЕНИЯ ИСТОЧНИКОВ | 2009 |
|
RU2392634C1 |
| RU 2010143338 А, 15.10.2010 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА ПЕРЕНОСНЫМ ПЕЛЕНГАТОРОМ | 2009 |
|
RU2405166C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАТИВНЫХ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК РАДИОСИГНАЛОВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2251803C1 |
| JP 3802422 B2, 26.07.2006 | |||
| Способ дуговой сварки по щелевому зазору | 1973 |
|
SU477798A1 |
| Континуальный процессор | 2020 |
|
RU2739723C1 |

