ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к управлению устройствами отображения, такими как жидкокристаллические устройства отображения, имеющие жидкокристаллические панели отображения с активной матрицей, и, в частности, к схеме управления отображением и к способу управления отображением для управления панелью отображения в устройстве отображения с использованием системы управления, именуемой ЗС-управлением (управлением на основе зарядовой связи (ЗС)).
ОБЛАСТЬ ТЕХНИКИ
Обычная система ЗС-управления, используемая в жидкокристаллическом устройстве отображения с активной матрицей, раскрыта, например, в патентной литературе 1. ЗС-управление объяснено на примере содержания, раскрытого в патентной литературе 1.
На чертеже Фиг. 57 показана конфигурация устройства, в котором реализовано ЗС-управление. На чертеже Фиг. 58 показаны формы различных рабочих сигналов при ЗС-управлении устройством на чертеже Фиг. 57.
Как показано на чертеже Фиг. 57, жидкокристаллическое устройство отображения, в котором реализовано ЗС-управление, включает в себя секцию 110 отображения изображения, схему 111 управления шинами истоков, схему 112 управления шинами затворов и схему 113 управления CS-шинами.
Секция 110 отображения изображения включает в себя множество шин 101 истоков (сигнальных шин), множество шин 102 затворов (шин развертки), переключающих элементов 103; электроды 104 пикселей; множество CS-шин 105 (шин емкостных накопителей (CS)) (общих шин электродов), конденсаторов 106 удержания, жидких кристаллов 107 и противоэлектрод 109. Переключающие элементы 103 расположены вблизи точек пересечения между множеством шин 101 истоков и множеством шин 102 затворов, соответственно. Электроды 104 пикселей соединены с соответствующими переключающими элементами 103.
CS-шины 105 образуют пары с соответствующими шинами 102 затворов, и они расположены параллельно друг другу. Один конец каждого из конденсаторов 106 удержания соединен с электродом 104 пикселя, а другой его конец соединен с CS-шиной 105. Противоэлектрод 109 выполнен таким образом, что обращен к электродам 104 пикселей, а между ними расположены жидкие кристаллы 107.
Схема 111 управления шинами истоков предусмотрена для управления шинами 101 истоков, и схема 112 управления шинами затворов предусмотрена для управления шинами 102 затворов. Кроме того, схема 113 управления CS-шинами предусмотрена для управления CS-шинами 105.
Каждый из переключающих элементов 103 сформирован из аморфного кремния (a-Si), поликристаллического кремния (p-Si), монокристаллического кремния (c-Si) и т.п. Вследствие наличия такой структуры между затвором и стоком переключающего элемента 103 сформирован конденсатор 108. Этот конденсатор 108 вызывает явление, при котором стробирующий импульс с шины 102 затворов смещает электрический потенциал электрода 104 пикселя в отрицательную сторону.
Как показано на чертеже Фиг. 58, электрический потенциал Vg шины 102 затворов в жидкокристаллическом устройстве отображения равен Von только в течение промежутка времени H (периода строчной развертки), в котором выбрана шина 102 затворов, и сохраняется равным Voff в течение других промежутков времени. Электрический потенциал Vs шины 101 истоков изменяется по амплитуде в зависимости от отображаемого видеосигнала, но имеет такую форму сигнала, которая изменяет его полярность на обратную в каждом промежутке времени H, причем его центральное значение равно потенциалу Vcom противоэлектрода, и, применительно к одной и той же шине 102 затворов, его полярность изменяется на обратную в соседнем промежутке времени H (управление с инверсией строк). Поскольку на чертеже Фиг. 58 сделано предположение о том, что на вход подают однородный видеосигнал, то электрический потенциал Vs изменяется с постоянной амплитудой.
Электрический потенциал Vd электрода 104 пикселя равен электрическому потенциалу Vs шины 101 истоков, поскольку переключающий элемент 103 является проводящим в течение промежутка времени, когда электрический потенциал Vg равен Von, и в тот момент времени, когда электрический потенциал Vg становится равным Voff, происходит незначительное смещение электрического потенциала Vd в отрицательную сторону через конденсатор 108 "затвор-сток".
Электрический потенциал Vc CS-шины 105 равен Ve+ в течение промежутка времени H, в котором выбрана соответствующая шина 102 затворов, и следующего промежутка времени H. Далее электрический потенциал Vc переключается так, что становится равным Ve- в течение промежутка времени H после этого следующего промежутка времени H, и затем сохраняется равным Ve- до следующего поля. Это переключение вызывает смещение электрического потенциала Vd в отрицательную сторону через конденсатор 106 удержания.
В результате, электрический потенциал Vd изменяется с большей амплитудой, чем электрический потенциал Vs; следовательно, амплитуда изменения электрического потенциала Vs может быть уменьшена. Это позволяет упростить схему и сократить потребление энергии в схеме 111 управления шинами истоков.
СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ЛИТЕРАТУРА
ПАТЕНТНАЯ ЛИТЕРАТУРА 1
Публикация заявки на патент Японии, Tokukai, № 2001-83943 А (Дата публикации: 30 марта 2001 г.).
ПАТЕНТНАЯ ЛИТЕРАТУРА 2
Публикация международной заявки WO 2009/050926 A1 (Дата публикации: 23 апреля 2009 г.).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
В жидкокристаллическом устройстве отображения, в котором используют управление с инверсией строк и ЗС-управление, существует проблема, заключающаяся в том, что в первом кадре после начала отображения возникают чередующиеся яркие и темные поперечные полосы в каждой строке (в каждой строке развертки жидкокристаллического устройства отображения).
На чертеже Фиг. 59 изображена временная диаграмма, на которой показано функционирование жидкокристаллического устройства отображения для объяснения причины возникновения этой проблемы.
На чертеже Фиг. 59 GSP представляет собой импульс включения затвора, который задает привязку по времени кадровой развертки, а GCK1 (CK) и GCK2 (CKB) представляют собой сигналы синхронизации затвора, которые подают с выхода схемы управления для задания привязки по времени работы сдвигового регистра. Промежуток времени от заднего фронта до следующего заднего фронта в GSP соответствует одному периоду кадровой развертки (периоду 1V). Каждый из промежутков времени: промежуток времени от переднего фронта в GCK1 до переднего фронта в GCK2 и промежуток времени от переднего фронта в GCK2 до переднего фронта в GCK1, соответствует одному периоду строчной развертки (периоду 1H). CMI представляет собой сигнал полярности, который изменяет свою полярность на обратную в каждом периоде строчной развертки.
Кроме того, на чертеже Фиг. 59 показаны следующие сигналы в указанном порядке следования: сигнал S, подаваемый на исток (видеосигнал), который подают из схемы 111 управления шинами истоков на шину 101 истоков (на шину 101 истоков, созданную в столбце номер x); стробирующий сигнал G1, который подают из схемы 112 управления шинами затворов на шину 102 затворов, созданную в первой строке; CS-сигнал CS1, который подают из схемы 113 управления шинами на CS-шину 105, созданную в первой строке; и электрический потенциал Vpix1 электрода пикселя, созданного в первой строке и в столбце номер x. Аналогичным образом, на чертеже Фиг. 59 показаны следующие сигналы в указанном порядке следования: стробирующий сигнал G2, который подают на шину 102 затворов, созданную во второй строке; CS-сигнал CS2, который подают на CS-шину 105, созданную во второй строке; и электрический потенциал Vpix2 электрода пикселя, созданного во второй строке и в столбце номер x. Кроме того, на чертеже Фиг. 59 показаны следующие сигналы в указанном порядке следования: стробирующий сигнал G3, который подают на шину 102 затворов, созданную в третьей строке; CS-сигнал CS3, который подают на CS-шину 105, созданную в третьей строке; и электрический потенциал Vpix3 электрода пикселя, созданного в третьей строке и в столбце номер x.
Следует отметить, что пунктирные линии в электрических потенциалах Vpix1, Vpix2 и Vpix3 указывают электрический потенциал противоэлектрода 109.
Ниже предполагают, что начальным кадром изображения, выводимого на экран устройства отображения, является первый кадр и что первому кадру предшествует исходное состояние. В исходном состоянии схема 111 управления шинами истоков, схема 112 управления шинами затворов и схема 113 управления CS-шинами все находятся на подготовительных стадиях или в состоянии покоя перед переходом в штатный режим работы. Следовательно, уровни стробирующих сигналов G1, G2 и G3 зафиксированы равными потенциалу "затвор выключен" (электрическому потенциалу, при котором затвор переключающего элемента 103 выключен), и уровни CS-сигналов CS1, CS2 и CS3 зафиксированы равными одному электрическому потенциалу (например, на низком уровне).
В первом кадре после исходного состояния схема 111 управления шинами истоков, схема 112 управления шинами затворов и схема 113 управления CS-шинами все находятся в штатном режиме работы. Это вызывает то, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и который изменяет свою полярность на обратную в каждом периоде 1H.
Следует отметить следующее: поскольку на чертеже Фиг. 59 предполагают, что на экран выводят однородное изображение, то амплитуда сигнала S, подаваемого на исток, является постоянной. Между тем, стробирующие сигналы G1, G2 и G3 служат в качестве потенциалов "затвор включен" (при которых затворы переключающих элементов 103 включены) в течение, соответственно, первого, второго и третьего периодов 1H в активном периоде (в эффективном периоде развертки) каждого кадра, и служат в качестве потенциалов "затвор выключен" в течение других промежутков времени.
Затем CS-сигналы CS1, CS2 и CS3 инвертируются после понижения уровней соответствующих им стробирующих сигналов G1, G2 и G3, и они принимают такие формы сигнала, которые являются противоположными друг другу в направлении инвертирования. В частности, в нечетном кадре уровень CS-сигнала CS2 повышается после понижения уровня соответствующего ему стробирующего сигнала G2, а уровень CS-сигналов CS1 и CS3 понижается после понижения уровня соответствующих им стробирующих сигналов G1 и G3. Кроме того, в четном кадре уровень CS-сигнала CS2 понижается после понижения уровня соответствующего ему стробирующего сигнала G2, а уровень CS-сигналов CS1 и CS3 повышается после понижения уровня соответствующих им стробирующих сигналов G1 и G3.
Следует отметить, что соотношение между передними и задними фронтами в CS-сигналах CS1, CS2 и CS3 в четных и в нечетных кадрах может быть противоположным вышеизложенному соотношению. Кроме того, привязкой по времени инвертирования CS-сигналов CS1, CS2 и CS3 могут являться задние фронты стробирующих сигналов G1, G2 и G3 или более поздние моменты времени, то есть соответствующие периоды строчной развертки или более поздние моменты времени. Например, CS-сигналы CS1, CS2 и CS3 могут быть инвертированы синхронно с передними фронтами стробирующих сигналов в следующей строке.
Однако поскольку в первом кадре все CS-сигналы CS1, CS2 и CS3 имеют в исходном состоянии один фиксированный электрический потенциал (на чертеже Фиг. 59 - низкий уровень), то электрические потенциалы Vpix1 и Vpix3 находятся в неправильном состоянии. В частности, CS-сигнал CS2 ведет себя таким же самым образом, как и в других нечетных кадрах (в третьем кадре, пятом кадре,...) в том смысле, что его уровень повышается после соответствующего понижения уровня стробирующего сигнала G2, но CS-сигналы CS1 и CS3 ведут себя по-иному, чем в других нечетных кадрах (третьем кадре, пятом кадре,...), в том смысле, что их электрический потенциал остается тем же самым (на чертеже Фиг. 59 - на низком уровне) после понижения уровня соответствующих стробирующих сигналов G1 и G3.
Поэтому в первом кадре изменение электрического потенциала CS-сигнала CS2 обычно происходит на электродах 104 пикселей во второй строке. Следовательно, когда электрический потенциал Vpix2 подвергается смещению электрического потенциала, вызванному изменением электрического потенциала CS-сигнала CS2, то электрический потенциал CS-сигналов CS1 и CS3 на электродах 104 пикселей в первой и третьей строках не изменяется. Соответственно, электрические потенциалы Vpix1 и Vpix3 не подвергаются смещению электрического потенциала (что указано на чертеже Фиг. 59 заштрихованными областями). В результате, несмотря на ввод сигналов S, подаваемых на исток, с тем же самым уровнем серого, возникает разность по яркости между первой и третьей строками и второй строкой вследствие разности между электрическими потенциалами Vpix1 и Vpix3 и электрическим потенциалом Vpix2. Эта разность по яркости проявляется как разность по яркости между нечетной строкой и четной строкой в секции отображения изображения в целом. Следовательно, появляются чередующиеся яркие и темные поперечные полосы в каждой отдельной строке изображения в первом кадре.
Технология, способная подавлять появление таких поперечных полос, раскрыта в патентной литературе 2. Технология из патентной литературы 2 описана ниже со ссылкой на чертежи Фиг. 60-62. На чертеже Фиг. 60 изображена блок-схема, на которой показана конфигурация схем управления (схемы 30 управления шинами затворов и схемы 40 управления CS-шинами), показанных в патентной литературе 2. На чертеже Фиг. 61 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве отображения. На чертеже Фиг. 62 изображена временная диаграмма, на которой показаны формы различных сигналов, которые вводят в схему управления CS-шинами и выводят из нее.
Как показано на чертеже Фиг. 60, схема 40 управления CS-шинами имеет множество CS-схем 41, 42, 43,..., 4n, которые соответствуют соответствующим им строкам. CS-схемы 41, 42, 43,..., 4n включают в себя, соответственно, схемы 41a, 42a, 43a,..., 4na D-защелок и логические схемы 41b, 42b, 43b,..., 4nb "ИЛИ". В приведенном ниже описании в качестве примера взяты CS-схемы 41 и 42, которые соответствуют, соответственно, первой и второй строкам.
Входными сигналами, которые подают в CS-схему 41, являются стробирующие сигналы G1 и G2, сигнал полярности "POL" и сигнал сброса "RESET", а входными сигналами, которые подают в CS-схему 42, являются стробирующие сигналы G2 и G3, сигнал полярности "POL" и сигнал сброса "RESET". Сигнал полярности "POL" и сигнал сброса "RESET" вводят из управляющей схемы (не проиллюстрирована).
Логическая схема 41b "ИЛИ" принимает стробирующий сигнал G1 с соответствующей шины 12 затворов и стробирующий сигнал G2 с шины 12 затворов следующей строки и тем самым выводит сигнал g1, показанный на чертеже Фиг. 62. Кроме того, логическая схема 42b "ИЛИ" принимает стробирующий сигнал G2 с соответствующей шины 12 затворов и стробирующий сигнал G3 с шины 12 затворов в следующей строке и тем самым выводит сигнал g2, показанный на чертеже Фиг. 62.
Схема 41a D-триггера принимает сигнал сброса "RESET" через свой контакт CL, принимает сигнал полярности "POL" через свой контакт D и принимает выходной сигнал g1 через свой контакт CK для сигнала синхронизации из логической схемы 41b "ИЛИ". В соответствии с изменением уровня электрического потенциала сигнала g1 (с низкого уровня до высокого уровня или с высокого уровня до низкого уровня), который схема 41a D-триггера принимает через свой контакт CK для сигнала синхронизации схема 41a D-триггера выводит в качестве CS-сигнала CS1 состояние ввода (низкий уровень или высокий уровень) сигнала полярности "POL", который она принимает через свой контакт D, и CS-сигнал CS1 указывает изменение уровня электрического потенциала. В частности, когда уровень электрического потенциала сигнала g1, который схема 41a D-триггера принимает через свой контакт CK для сигнала синхронизации, является высоким уровнем, то триггерная схема 41a выводит состояние ввода (низкий уровень или высокий уровень) сигнала полярности "POL", который она принимает через свой контакт D. Когда произошло изменение уровня электрического потенциала сигнала g1, который триггерная схема 41a принимает через свой контакт CK для сигнала синхронизации, с высокого уровня до низкого уровня, то триггерная схема 41a фиксирует состояние ввода (низкий уровень или высокий уровень) сигнала полярности "POL", который она приняла через свой контакт D в момент изменения, и сохраняет это зафиксированное состояние до следующего раза, когда уровень электрического потенциала сигнала g1, который триггерная схема 41a принимает через свой контакт CK для сигнала синхронизации, повысится до высокого уровня. Затем схема 41a D-триггера выводит через свой контакт Q зафиксированное состояние в качестве CS-сигнала CS1, показанного на чертеже Фиг. 62, который указывает изменение уровня электрического потенциала.
Кроме того, аналогичным образом, схема 42a D-триггера принимает сигнал сброса "RESET" через свой контакт CL, принимает сигнал полярности "POL" через свой контакт D и принимает выходной сигнал g2 через свой контакт CK для сигнала синхронизации из логической схемы 42b "ИЛИ". Это позволяет выводить из схемы 42a D-триггера через ее контакт Q CS-сигнал CS2, показанный на чертеже Фиг. 62, который указывает изменение уровня электрического потенциала.
Вышеизложенная конфигурация вызывает то, что CS-сигналы CS1 и CS2 отличаются один от другого по электрическому потенциалу в те моменты времени, когда понижаются уровни стробирующих сигналов в первой и второй строках. Следовательно, как показано на чертеже Фиг. 61, электрический потенциал Vpix1 подвергается смещению электрического потенциала, вызванному изменением электрического потенциала CS-сигнала CS1, и электрический потенциал Vpix2 подвергается смещению электрического потенциала, вызванному изменением электрического потенциала CS-сигнала CS2. Это позволяет устранить такие чередующиеся яркие и темные поперечные полосы в каждой отдельной строке, подобные тем, которые показаны на чертеже Фиг. 59.
Однако технология, раскрытая в патентной литературе 2, основана на управлении с инверсией строк (1H), в силу чего полярность напряжения на электроде пикселя изменяется на обратную в каждой отдельной строке (одна строка, один период строчной развертки). То есть, управление осуществляют так, что электрический потенциал CS-сигнала изменяется в каждой отдельной строке. Следовательно, электрический потенциал CS-сигнала не может быть реализован так, что изменяется, например, через каждые две строки. Это вызывает проблему, состоящую в том, что когда этот способ управления применен к устройству отображения, которое выполняет отображение на основании видеосигнала, разрешающая способность которого была преобразована в более высокую разрешающую способность (например, отображает изображение с увеличением размера в два раза), то в изображении, выводимом на экран устройства отображения, появляются чередующиеся яркие и темные поперечные полосы.
В приведенном ниже описании рассмотрено то, почему появляются поперечные полосы при осуществлении управления с преобразованием разрешающей способности. На чертеже Фиг. 63(a) показаны (i) изображения, выводимые на экран устройства отображения, которые визуализируются во время обычного режима управления, и (ii) полярности потенциалов сигналов, подаваемых на электроды пикселей, которые соответствуют изображениям, выводимым на экран устройства отображения, на чертеже Фиг. 63(b) показано (i) изображение, выводимое на экран устройства отображения, которое показано в левом верхнем участке (окруженном пунктирной линией) на чертеже Фиг. 63(a), и показаны (ii) полярности потенциалов сигналов, подаваемых на электроды пикселей, которые наблюдаются в том случае, когда разрешающая способность соответствующего видеосигнала была преобразована с коэффициентом 2 в обоих направлениях: в направлении вдоль строк и в направлении вдоль столбцов (то есть, отображение с увеличением размера в два раза).
Управление с преобразованием разрешающей способности осуществляют так, что в зависимости от коэффициента преобразования сигналы, имеющие одинаковую полярность и одинаковый электрический потенциал (уровень серого), подают во множество пикселей, смежных друг с другом в направлении вдоль столбца (в направлении развертки). Например, в случае отображения с увеличением размера в два раза (i) сигнал S, подаваемый на исток, который подают на электрод пикселя, расположенного в третьей строке и во втором столбце, показанный на чертеже Фиг. 63(a), и (ii) сигнал S, подаваемый на исток, который подают на электрод пикселя каждого из пикселей, расположенных в пятой и в шестой строках и в третьем и в четвертом столбцах, показанный на чертеже Фиг. 63(b), являются идентичными друг другу по полярности (которой здесь является отрицательная полярность) и по электрическому потенциалу (уровню серого).
На чертеже Фиг. 64 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда в обычном жидкокристаллическом устройстве отображения используется управление отображением с увеличением размера в два раза. Каждая из ссылочных позиций с "AA" по SA, присвоенная сигналу S, подаваемому на исток, который показан на чертеже Фиг. 64, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, в первом кадре сигнал S, подаваемый на исток, имеет одинаковые потенциалы сигнала положительной полярности ("AA") в течение первого и второго периодов строчной развертки и имеет одинаковые потенциалы сигнала отрицательной полярности ("KA") в течение третьего и четвертого периодов строчной развертки. Кроме того, во втором кадре сигнал S, подаваемый на исток, имеет одинаковые потенциалы сигнала отрицательной полярности ("II") в течение первого и второго периодов строчной развертки и имеет одинаковые потенциалы сигнала положительной полярности ("KI") в течение третьего и четвертого периодов строчной развертки. Поскольку полярности напряжений на электродах пикселей инвертируются через каждые две строки (две шины), как и в описанном выше случае управления с преобразованием разрешающей способности, при котором реализовано отображение с увеличением размера в два раза, то в устройстве отображения, в котором используется управление с инверсией строк (1H), в изображении, выводимом на экран устройства отображения, возникают чередующиеся яркие и темные поперечные полосы (заштрихованные области на чертеже Фиг. 64).
Приведенный выше пример представляет собой случай, в котором коэффициентом преобразования является увеличение размера в два раза. Однако нежелательные чередующиеся яркие и темные поперечные полосы в изображении, выводимом на экран устройства отображения, возникают также и в том случае, когда коэффициентом преобразования является увеличение размера в три раза, или когда разрешающая способность была преобразована только лишь в направлении вдоль столбцов.
То есть, согласно обычному способу в том случае, когда жидкокристаллическое устройство отображения, в котором используется ЗС-управление, выполняет отображение на основании видеосигнала, разрешающая способность которого была преобразована в более высокую разрешающую способность (то есть, выполняет отображение с увеличением размера в n раз (где n - целое число, равное двум или большее, чем два)), возникает проблема, состоящая в появлении чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения.
Настоящее изобретение было сделано с учетом этой проблемы, и задачей настоящего изобретения является создание схемы управления отображением и способа управления отображением, в каждом из которых используют ЗС-управление, причем эта схема управления отображением и этот способ управления отображением способны улучшить качество отображения за счет устранения возникновения чередующихся ярких и темных поперечных полос, которые возникают в изображении, выводимом на экран устройства отображения, когда отображение выполняют на основании видеосигнала, разрешающая способность которого была преобразована в более высокую разрешающую способность.
РЕШЕНИЕ ЗАДАЧИ
Схема управления отображением согласно настоящему изобретению представляет собой схему управления отображением для использования в устройстве отображения, (i) которое выполняет отображение на основании видеосигнала, разрешающая способность которого была преобразована в более высокую разрешающую способность и (ii) в котором, посредством подачи сигналов проводника конденсаторов удержания на проводники конденсаторов удержания, образующие конденсаторы с электродами пикселей, содержащимися в пикселях, потенциалы сигналов, записанные в электроды пикселей с шин сигнала передачи данных, изменяют в направлении, соответствующем полярностям потенциалов сигналов, в которой, предполагая, что направлением, в котором продолжаются шины сигнала развертки, является направление вдоль строк, когда разрешающая способность видеосигнала преобразована с коэффициентом n (где n - целое число, равное двум или большее чем два), по меньшей мере, в направлении вдоль столбцов, на электроды пикселей, содержащиеся в соответствующих n пикселях, которые соответствуют n смежным шинам сигнала развертки и которые являются смежными друг с другом в направлении вдоль столбцов, подают потенциалы сигналов, имеющие одинаковую полярность и одинаковый уровень серого, и направление изменения потенциалов сигналов, записанных в электроды пикселей с шин сигнала передачи данных, изменяется через каждые n смежных строк в соответствии с полярностями потенциалов сигналов.
Согласно этой схеме управления отображением сигналы проводника конденсаторов удержания изменяют потенциалы сигналов, записанные в электроды пикселей, в направлении, соответствующем полярностям потенциалов сигналов. Это обеспечивает реализацию ЗС-управления. Кроме того, согласно этой схеме управления отображением отображение выполняют на основании видеосигнала, разрешающая способность которого была преобразована с коэффициентом n (где n - целое число, равное двум или большее чем два), по меньшей мере, в направлении вдоль столбцов. Это обеспечивает реализацию управления с преобразованием, обеспечивающим высокую разрешающую способность (управление отображением с увеличением размера в n раз).
Кроме того, согласно этой конфигурации направление изменения потенциалов сигналов, записанных в электроды пикселей с шин сигнала передачи данных, изменяется через каждые n смежных строк в соответствии с полярностями потенциалов сигналов. Например, в случае выполнения отображения на основании видеосигнала, разрешающая способность которого была преобразована с коэффициентом 2 (управление отображением с увеличением размера в два раза) в обоих направлениях: в направлении вдоль столбцов и в направлении вдоль строк, направление изменения потенциалов сигналов, записанных в электроды пикселей, изменяется через каждые две смежные строки. Это устраняет возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения (см. Фиг. 64). Соответственно, можно устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, когда устройство отображения, в котором используется ЗС-управление, осуществляет управление с преобразованием, обеспечивающим высокую разрешающую способность (управление отображением с увеличением размера в n раз), и, таким образом, можно улучшить качество отображения в устройстве отображения.
Устройство отображения согласно настоящему изобретению включает в себя: любую из вышеописанных схем управления отображением; и панель отображения.
Способ управления отображением согласно настоящему изобретению представляет собой способ управления устройством отображения, (i) который выполняет отображение на основании видеосигнала, разрешающая способность которого была преобразована в более высокую разрешающую способность и (ii) в котором посредством подачи сигналов проводника конденсаторов удержания на проводники конденсаторов удержания, образующие конденсаторы с электродами пикселей, содержащимися в пикселях, потенциалы сигналов, записанные в электроды пикселей с шин сигнала передачи данных, изменяют в направлении, соответствующем полярностям потенциалов сигналов, причем упомянутый способ включает в себя следующие операции: когда разрешающая способность видеосигнала преобразована с коэффициентом n (где n - целое число, равное двум или большее чем два), по меньшей мере, в направлении вдоль столбцов, на электроды пикселей, содержащиеся в соответствующих n пикселях, которые соответствуют n смежным шинам сигнала развертки и которые являются смежными друг с другом в направлении вдоль столбцов, подают потенциалы сигналов, имеющие одинаковую полярность и одинаковый уровень серого, предполагая, что направлением, в котором продолжаются шины сигнала развертки, является направление вдоль строк; и вызывают изменение направления изменения потенциалов сигналов, записанных в электроды пикселей с шин сигнала передачи данных, через каждые n смежных строк в соответствии с полярностями потенциалов сигналов.
Способ управления отображением может приводить к тем же самым эффектам, к которым приводит конфигурация схемы управления отображением.
ПОЛЕЗНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
Как было описано выше, схема управления отображением и способ управления отображением согласно настоящему изобретению каждый сконфигурированы так, что в том случае, когда отображение выполняют с использованием ЗС-управления на основании видеосигнала, разрешающая способность которого была преобразована с коэффициентом n, по меньшей мере, в направлении вдоль столбцов, направление изменения потенциалов сигналов, записанных в электроды пикселей с шин сигнала передачи данных, изменяется через каждые n смежных строк в зависимости от полярностей потенциалов сигналов. Это позволяет устранить в устройстве отображения, в котором используют ЗС-управление, возникновение чередующихся ярких и темных поперечных полос, которые возникают в изображении, выводимом на экран устройства отображения, при выполнении отображения на основании видеосигнала, разрешающая способность которого была преобразована с коэффициентом n, и улучшить качество отображения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертеже Фиг. 1 изображена блок-схема, на которой показана конфигурация жидкокристаллического устройства отображения согласно одному из вариантов осуществления настоящего изобретения.
На чертеже Фиг. 2 изображена эквивалентная электрическая схема, на которой показана электрическая конфигурация каждого пикселя в жидкокристаллическом устройстве отображения из Фиг. 1.
На чертеже Фиг. 3 изображена блок-схема, на которой показана конфигурация схемы управления шинами затворов и схемы управления CS-шинами в первом примере.
На чертеже Фиг. 4 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве 1 отображения в первом примере.
На чертеже Фиг. 5 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 1 отображения в первом примере и выводят из нее.
На чертеже Фиг. 6 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в первом примере, и (ii) CS-сигналами, которые выводят из CS-схем в первом примере.
На чертеже Фиг. 7 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 1 отображения во втором примере осуществляет управление с инверсией трех строк (3H).
На чертеже Фиг. 8 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 1 отображения во втором примере и выводят из нее.
На чертеже Фиг. 9 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы во втором примере, и (ii) CS-сигналами, которые выводят из CS-схем во втором примере.
На чертеже Фиг. 10 изображена блок-схема, на которой показана конфигурация схемы управления шинами затворов и схемы управления CS-шинами в третьем примере.
На чертеже Фиг. 11 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 1 отображения в третьем примере осуществляет управление с инверсией двух строк (2H).
На чертеже Фиг. 12 изображена временная диаграмма, на которой показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 1 отображения в третьем примере и выводят из нее.
На чертеже Фиг. 13 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в третьем примере, и (ii) CS-сигналами, которые выводят из CS-схем в третьем примере.
На чертеже Фиг. 14 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 1 отображения в четвертом примере осуществляет управление с инверсией трех строк (3H).
На чертеже Фиг. 15 изображена временная диаграмма, на которой показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 1 отображения в четвертом примере и выводят из нее.
На чертеже Фиг. 16 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в четвертом примере, и (ii) CS-сигналами, которые выводят из CS-схем в четвертом примере.
На чертеже Фиг. 17 изображена блок-схема, на которой показана конфигурация схемы управления шинами затворов и схемы управления CS-шинами в пятом примере.
На чертеже Фиг. 18 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 1 отображения в пятом примере осуществляет управление с инверсией двух строк (2H).
На чертеже Фиг. 19 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 1 отображения в пятом примере и выводят из нее.
На чертеже Фиг. 20 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в пятом примере, и (ii) CS-сигналами, которые выводят из CS-схем в пятом примере.
На чертеже Фиг. 21 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 1 отображения в пятом примере осуществляет управление с инверсией трех строк (3H).
На чертеже Фиг. 22 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 1 отображения в шестом примере и выводят из нее.
На чертеже Фиг. 23 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в шестом примере, и (ii) CS-сигналами, которые выводят из CS-схем в шестом примере.
На чертеже Фиг. 24 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 2 отображения в седьмом примере осуществляет управление с инверсией четырех строк (4H).
На чертеже Фиг. 25 изображена блок-схема, на которой показана конфигурация схемы управления шинами затворов и схемы управления CS-шинами в седьмом примере.
На чертеже Фиг. 26 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 2 отображения в седьмом примере и выводят из нее.
На чертеже Фиг. 27 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в седьмом примере, и (ii) CS-сигналами, которые выводят из CS-схем в седьмом примере.
На чертеже Фиг. 28 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 3 отображения в восьмом примере осуществляет управление с инверсией двух строк (2H).
На чертеже Фиг. 29 изображена блок-схема, на которой показана конфигурация схемы управления шинами затворов и схемы управления CS-шинами в восьмом примере.
На чертеже Фиг. 30 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 3 отображения в восьмом примере и выводят из нее.
На чертеже Фиг. 31 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в восьмом примере, и (ii) CS-сигналами, которые выводят из CS-схем в восьмом примере.
На чертеже Фиг. 32 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 3 отображения в девятом примере осуществляет управление с инверсией трех строк (3H).
На чертеже Фиг. 33 изображена блок-схема, на которой показана конфигурация схемы управления шинами затворов и схемы управления CS-шинами в девятом примере.
На чертеже Фиг. 34 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 3 отображения в девятом примере и выводят из нее.
На чертеже Фиг. 35 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в девятом примере, и (ii) CS-сигналами, которые выводят из CS-схем в девятом примере.
На чертеже Фиг. 36 изображена блок-схема, на которой показана конфигурация схемы управления шинами затворов и схемы управления CS-шинами в десятом примере.
На чертеже Фиг. 37 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 3 отображения в десятом примере осуществляет управление с инверсией трех строк (3H).
На чертеже Фиг. 38 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 3 отображения в десятом примере и выводят из нее.
На чертеже Фиг. 39 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в десятом примере, и (ii) CS-сигналами, которые выводят из CS-схем в десятом примере.
На чертеже Фиг. 40 изображена блок-схема, на которой показана конфигурация схемы управления шинами затворов и схемы управления CS-шинами в одиннадцатом примере.
На чертеже Фиг. 41 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 3 отображения в одиннадцатом примере осуществляет управление с инверсией двух строк (2H).
На чертеже Фиг. 42 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 3 отображения в одиннадцатом примере и выводят из нее.
На чертеже Фиг. 43 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в одиннадцатом примере, и (ii) CS-сигналами, которые выводят из CS-схем в одиннадцатом примере.
На чертеже Фиг. 44 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 4 отображения в двенадцатом примере осуществляет управление с инверсией трех строк (3H).
На чертеже Фиг. 45 изображена блок-схема, на которой показана конфигурация схемы управления шинами затворов и схемы управления CS-шинами в двенадцатом примере.
На чертеже Фиг. 46 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 4 отображения в двенадцатом примере и выводят из нее.
На чертеже Фиг. 47 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в двенадцатом примере, и (ii) CS-сигналами, которые выводят из CS-схем в двенадцатом примере.
На чертеже Фиг. 48 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда жидкокристаллическое устройство 4 отображения в тринадцатом примере осуществляет управление с инверсией трех строк (3H).
На чертеже Фиг. 49 изображена блок-схема, на которой показана конфигурация схемы управления шинами затворов и схемы управления CS-шинами в тринадцатом примере.
На чертеже Фиг. 50 показаны формы различных сигналов, которые вводят в схему управления CS-шинами в жидкокристаллическом устройстве 4 отображения в тринадцатом примере и выводят из нее.
На чертеже Фиг. 51 показаны соотношения между (i) сигналами полярности и выходными сигналами из сдвиговых регистров, которые вводят в CS-схемы в тринадцатом примере, и (ii) CS-сигналами, которые выводят из CS-схем в тринадцатом примере.
На чертеже Фиг. 52 изображена блок-схема, на которой показана другая конфигурация схемы управления шинами затворов в жидкокристаллическом устройстве отображения из настоящего изобретения.
На чертеже Фиг. 53 изображена блок-схема, на которой показана конфигурация жидкокристаллического устройства отображения, включающего в себя схему управления шинами затворов, показанную на чертеже Фиг. 52.
На чертеже Фиг. 54 изображена блок-схема, на которой показана конфигурация схемы сдвигового регистра, входящей в состав схемы управления шинами затворов, показанной на чертеже Фиг. 52.
На чертеже Фиг. 55 изображена принципиальная электрическая схема, на которой показана конфигурация триггера, входящего в состав схемы сдвигового регистра, показанной на чертеже Фиг. 54.
На чертеже Фиг. 56 изображена временная диаграмма, на которой показано функционирование триггера, показанного на чертеже Фиг. 55.
На чертеже Фиг. 57 изображена блок-схема, на которой показана конфигурация обычного жидкокристаллического устройства отображения, в котором используют ЗС-управление.
На чертеже Фиг. 58 изображена временная диаграмма, на которой показаны формы различных сигналов в обычном жидкокристаллическом устройстве отображения.
На чертеже Фиг. 59 изображена временная диаграмма, на которой показаны формы различных сигналов в обычном жидкокристаллическом устройстве отображения.
На чертеже Фиг. 60 изображена блок-схема, на которой показана другая конфигурация схемы управления шинами затворов и схемы управления CS-шинами в обычном жидкокристаллическом устройстве отображения.
На чертеже Фиг. 61 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве отображения, включающем в себя схемы управления, показанные на чертеже Фиг. 60.
На чертеже Фиг. 62 изображена временная диаграмма, на которой показаны формы различных сигналов, которые вводят в схему управления CS-шинами, показанную на чертеже Фиг. 60, и выводят из нее.
На чертеже Фиг. 63 изображен ряд диаграмм (a) и (b), на которых показаны полярности потенциалов сигналов, подаваемых на электроды пикселей, причем на диаграмме (a) показаны полярности потенциалов сигналов, подаваемых на электроды пикселей во время обычного управления, а на диаграмме (b) показано (i) изображение, выводимое на экран устройства отображения, которое показано в левом верхнем участке (окруженном пунктирной линией) на диаграмме (a), и показаны (ii) полярности потенциалов сигналов, подаваемых на электроды пикселей, которые наблюдаются в том случае, когда разрешающая способность видеосигнала была преобразована с коэффициентом 2 (отображение с увеличением размера в два раза).
На чертеже Фиг. 64 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда обычное жидкокристаллическое устройство отображения осуществляет управление отображением с увеличением размера в два раза.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Ниже приведено описание варианта осуществления настоящего изобретения со ссылкой на чертежи Фиг. 1-23.
Сначала приведено описание конфигурации жидкокристаллического устройства 1 отображения, соответствующего устройству отображения из настоящего изобретения, со ссылкой на чертежи Фиг. 1 и Фиг. 2. На чертеже Фиг. 1 изображена блок-схема, на которой показана общая конфигурация жидкокристаллического устройства 1 отображения, а на чертеже Фиг. 2 изображена эквивалентная электрическая схема, на которой показана электрическая конфигурация каждого пикселя в жидкокристаллическом устройстве 1 отображения.
Жидкокристаллическое устройство 1 отображения включает в себя: жидкокристаллическую панель 10 отображения с активной матрицей, которая соответствует панели отображения из настоящего изобретения; схему 20 управления шинами истоков, которая соответствует схеме управления шинами сигнала передачи данных из настоящего изобретения; схему 30 управления шинами затворов, которая соответствует схеме управления шинами сигнала развертки из настоящего изобретения; схеме 40 управления CS-шинами, которая соответствует схеме управления проводниками конденсаторов удержания из настоящего изобретения; и управляющую схему 50, которая соответствует управляющей схеме из настоящего изобретения.
Жидкокристаллическая панель 10 отображения, сформированная путем размещения жидких кристаллов между подложкой активной матрицы и противоположной подложкой (не проиллюстрирована), имеет большое количество пикселей P, упорядоченно расположенных в строках и в столбцах.
Кроме того, жидкокристаллическая панель 10 отображения включает в себя: шины 11 истоков, созданные на подложке активной матрицы, которые соответствуют шинам сигнала передачи данных из настоящего изобретения; шины 12 затворов, созданные на подложке активной матрицы, которые соответствуют шинам сигнала развертки из настоящего изобретения; тонкопленочные транзисторы 13 (именуемые ниже как “TFT”), созданные на подложке активной матрицы, которые соответствуют переключающему элементу из настоящего изобретения; электроды 14 пикселей, созданные на подложке активной матрицы, которые соответствуют электродам пикселей из настоящего изобретения; CS-шины 15, созданные на подложке активной матрицы, которые соответствуют проводникам конденсаторов удержания из настоящего изобретения; и противоэлектрод 19, созданный на противоположной подложке. Следует отметить, что каждый из тонкопленочных транзисторов (TFT) 13, опущенный на чертеже Фиг. 1, показан на чертеже Фиг. 2 отдельно.
Шины 11 истоков расположены одна за другой в столбцах параллельно друг другу в направлении вдоль столбцов (в продольном направлении), а шины 12 затворов расположены одна за другой в строках параллельно друг другу в направлении вдоль строк (в поперечном направлении). Каждый из тонкопленочных транзисторов (TFT) 13 создан в соответствующей точке пересечения шины 11 истоков с шиной 12 затворов, так же как и электроды 14 пикселей. Каждый из тонкопленочных транзисторов (TFT) 13 имеет свой электрод s истока, соединенный с шиной 11 истоков, свой электрод g затвора, соединенный с шиной 12 затворов, и свой электрод d стока, соединенный с электродом 14 пикселя. Кроме того, каждый электрод 14 пикселя образует жидкокристаллический конденсатор 17 с противоэлектродом 19, причем между электродом 14 пикселя и противоэлектродом 19 расположены жидкие кристаллы.
При этом, когда стробирующий сигнал (сигнал развертки), поданный на шину 12 затворов, вызывает включение затвора TFT 13, и на электроде 14 пикселя записывается сигнал, подаваемый на исток (сигнал передачи данных) с шины 11 истоков, то электроду 14 пикселя сообщают электрический потенциал, соответствующий сигналу, подаваемому на исток. В результате, к жидким кристаллам, расположенным между электродом 14 пикселя и противоэлектродом 19, приложен электрический потенциал, соответствующий сигналу на истоке. Это обеспечивает возможность реализации отображения уровня серого, соответствующего сигналу на истоке.
CS-шины 15 расположены одна за другой в строках параллельно друг другу в направлении вдоль строк (в поперечном направлении) таким образом, что они образуют пары с соответствующими шинами 12 затворов. Каждая из CS-шин 15 образует конденсатор 16 удержания (также именуемый “вспомогательным конденсатором”) с каждым одним из электродов 14 пикселей, расположенных в каждой строке, в силу чего она имеет емкостную связь с электродами 14 пикселей.
Следует отметить следующее: поскольку вследствие своей структуры TFT 13 имеет "подтягивающий" конденсатор 18, сформированный между электродом g затвора и электродом d стока, то на электрический потенциал электрода 14 пикселя воздействует (подтягивает его) изменение электрического потенциала шины 12 затворов. Однако для упрощения объяснения этот эффект здесь не учитывается.
Управление сконфигурированной таким образом жидкокристаллической панелью 10 отображения осуществляется схемой 20 управления шинами истоков, схемой 30 управления шинами затворов и схемой 40 управления CS-шинами. Кроме того, управляющая схема 50 подает в схему 20 управления шинами истоков, в схему 30 управления шинами затворов и в схему 40 управления CS-шинами различные сигналы, необходимые для управления жидкокристаллической панелью 10 отображения.
В данном варианте осуществления изобретения в течение активного промежутка периода (эффективного периода развертки) в периоде кадровой развертки, который повторяется периодически, каждой строке последовательно отводится период строчной развертки, и развертку осуществляют последовательно. Для этого, будучи синхронизированной с периодом строчной развертки в каждой строке, схема 30 управления шинами затворов последовательно выводит на шину 12 затворов в этой строке стробирующий сигнал для включения тонкопленочных транзисторов (TFT) 13. Подробное описание схемы 30 управления шинами затворов приведено ниже.
Схема 20 управления шинами истоков выводит сигнал, подаваемый на исток, на каждую шину 11 истоков. Этот сигнал, подаваемый на исток, получен схемой 20 управления шинами истоков, принимающей видеосигнал извне жидкокристаллического устройства 1 отображения через управляющую схему 50, распределяющей видеосигнал по каждому столбцу и усиливающей видеосигнал и т.п.
Кроме того, для осуществления так называемого управления с инверсией n строк (nH) схема 20 управления шинами истоков сконфигурирована так, что полярность выводимого из нее сигнала, подаваемого на исток, (i) является одинаковой для всех пикселей в одной и той же строке и инвертируется через каждые n смежных строк, и (ii) инвертируется синхронно с периодами кадровой развертки. Например, как показано на чертеже Фиг. 4, на котором показаны привязки по времени управления с инверсией двух строк (2H), полярность сигнала S, подаваемого на исток в течение периодов строчной развертки в первой и второй строках, является обратной полярности сигнала S, подаваемого на исток в течение периодов строчной развертки в третьей и четвертой строках. Кроме того, полярность сигнала S, подаваемого на исток в течение периода строчной развертки в первой строке в первом кадре, является обратной полярности сигнала S, подаваемого на исток в течение периода строчной развертки в первой строке во втором кадре. То есть, в случае управления с инверсией n строк (nH) сигнал S, подаваемый на исток, инвертирует свою полярность (полярность электрического потенциала электрода пикселя) через каждые n строк (n рядов).
Кроме того, для выполнения отображения на основании видеосигнала, разрешающая способность которого была преобразована (с коэффициентом n) в более высокую разрешающую способность, по меньшей мере, в направлении вдоль столбцов, схема 20 управления шинами истоков подает потенциалы сигналов, имеющие одинаковую полярность и одинаковый уровень серого, через каждые n строк (n рядов). Например, в случае выполнения отображения на основании видеосигнала, разрешающая способность которого преобразована с коэффициентом 2 в обоих направлениях: в направлении вдоль столбцов и в направления вдоль строк, сигналы S, подаваемые на исток, которые подают в первую и вторую строки, имеют одинаковую полярность напряжения и одинаковый уровень серого, тогда как сигналы, подаваемые на исток, которые подают в третью и четвертую строки, имеют одинаковую полярность напряжения и одинаковый уровень серого. Следует отметить следующее: несмотря на то, что в приведенном ниже описании предполагают, что одна строка (один ряд) соответствует одному периоду строчной развертки, это не является ограничивающим признаком настоящего изобретения.
Схема 40 управления CS-шинами выводит CS-сигнал, соответствующий сигналу проводника конденсаторов удержания, из настоящего изобретения на каждую CS-шину 15. Этот CS-сигнал представляет собой сигнал, электрический потенциал которого переключается (повышается или понижается) между двумя значениями (высоким и низким уровнями электрического потенциала) и который отрегулирован так, что электрический потенциал в тот момент времени, когда тонкопленочные транзисторы (TFT) 13 в соответствующей строке переключаются из состояния "включено" в состояние "выключено" (то есть, в тот момент времени, когда уровень стробирующего сигнала понижается), изменяется через каждые n смежных строк. Подробное описание схемы 40 управления CS-шинами приведено ниже.
Управляющая схема 50 управляет схемой 30 управления шинами затворов, схемой 20 управления шинами истоков и схемой 40 управления CS-шинами, вызывая тем самым то, что каждая из них выводит сигналы, показанные на чертеже Фиг. 4.
Жидкокристаллическое устройство отображения, имеющее вышеописанную конфигурацию, сконфигурировано для (i) преобразования разрешающей способности видеосигнала с коэффициентом n (где n - целое число, равное двум или большее чем два), по меньшей мере, в направлении вдоль столбцов и (ii) осуществления управления с инверсией n строк. Несмотря на то, что жидкокристаллическое устройство отображения согласно данному варианту осуществления изобретения сконфигурировано для преобразования разрешающей способности видеосигнала с коэффициентом n в обоих направлениях: в направлении вдоль столбцов и в направлении вдоль строк, это не является ограничивающим признаком. Следовательно, жидкокристаллическое устройство отображения может быть сконфигурировано для преобразования разрешающей способности с коэффициентом n только в направлении вдоль столбцов. Ниже в качестве примера взят вариант осуществления изобретения, в котором отображение выполняют на основании видеосигнала, разрешающая способность которого была преобразована с коэффициентом n в обоих направлениях: в направлении вдоль столбцов и в направлении вдоль строк (управление отображением с увеличением размера в n раз).
ПЕРВЫЙ ПРИМЕР
На чертеже Фиг. 4 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве 1 отображения, в котором используется управление отображением с увеличением размера в два раза. На чертеже Фиг. 4, как и на чертеже Фиг. 64, GSP представляет собой импульс включения затвора, который задает привязку по времени кадровой развертки, а GCK1 (CK) и GCK2 (CKB) представляют собой стробирующие тактовые импульсы, выведенные из управляющей схемы 50, для задания привязки по времени работы сдвигового регистра. Промежуток времени от заднего фронта до следующего заднего фронта в GSP соответствует одному периоду кадровой развертки (периоду 1V). Каждый из промежутков времени: промежуток времени от переднего фронта в GCK1 до переднего фронта в GCK2 и промежуток времени от переднего фронта GCK2 до переднего фронта в GCK1 соответствует одному периоду строчной развертки (периоду 1H). Каждый из сигналов CMI1 и CMI2 представляет собой сигнал полярности, который изменяет свою полярность на обратную в заданные привязки по времени.
Кроме того, на чертеже Фиг. 4 показаны следующие сигналы в указанном порядке следования: сигнал S, подаваемый на исток (видеосигнал), который подают из схемы 20 управления шинами истоков на шину 11 истоков (на шину 11 истоков, имеющуюся в столбце номер x); стробирующий сигнал G1, который подают из схемы 30 управления шинами затворов на шину 12 затворов, имеющуюся в первой строке; CS-сигнал CS1, который подают из схемы управления шины 40 на CS-шину 15, имеющуюся в первой строке; и форма сигнала электрического потенциала Vpix1 электрода 14 пикселя, имеющегося в первой строке и в столбце номер x. На чертеже Фиг. 4 показаны следующие сигналы в указанном порядке следования: стробирующий сигнал G2, который подают на шину 12 затворов, имеющуюся во второй строке; CS-сигнал CS2, который подают на CS-шину 15, имеющуюся во второй строке; и форма сигнала электрического потенциала Vpix2 электрода 14 пикселя, имеющегося во второй строке и в столбце номер x. На чертеже Фиг. 4 показаны следующие сигналы в указанном порядке следования: стробирующий сигнал G3, который подают на шину 12 затворов, имеющуюся в третьей строке; CS-сигнал CS3, который подают на CS-шину 15, имеющуюся в третьей строке; и форма сигнала электрического потенциала Vpix3 электрода 14 пикселя, имеющегося в третьей строке и в столбце номер x. Что касается четвертой и пятой строк, то на чертеже Фиг. 4 аналогичным образом показаны следующие сигналы: стробирующий сигнал G4, CS-сигнал CS4 и форма сигнала электрического потенциала Vpix4 в указанном порядке следования, и стробирующий сигнал G5, CS-сигнал CS5 и форма сигнала электрического потенциала Vpix5 в указанном порядке следования.
Следует отметить, что пунктирные линии на электрических потенциалах Vpix1, Vpix2, Vpix3, Vpix4 и Vpix5 указывают электрический потенциал противоэлектрода 19.
Ниже предполагают, что начальным кадром изображения, выводимого на экран устройства отображения, является первый кадр и что первому кадру предшествует исходное состояние. Как показано на чертеже Фиг. 4, во время исходного состояния все CS-сигналы CS1-CS5 имеют один фиксированный электрический потенциал (на чертеже Фиг. 4 - низкий уровень). В первом кадре уровень CS-сигнала CS1 в первой строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G1 (который соответствует выходному сигналу SRO1 из соответствующей схемы SR1 сдвигового регистра). Уровень CS-сигнала CS2 во второй строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G2. Уровень CS-сигнала CS3 в третьей строке понижается в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G3. Уровень CS-сигнала CS4 в четвертой строке понижается в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G4. Уровень CS-сигнала CS5 в пятой строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G5.
Следует отметить, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и который изменяет свою полярность на обратную через каждые два периода строчной развертки (2H). Сигнал S, подаваемый на исток, имеет одинаковый электрический потенциал (уровень серого) в течение двух смежных периодов строчной развертки (2H) и имеет одинаковый электрический потенциал (уровень серого) в течение следующих двух смежных периодов строчной развертки (2H). То есть, каждая из ссылочных позиций с "AA" по "SA", показанных на чертеже Фиг. 4, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, сигнал S, подаваемый на исток в первом кадре, имеет идентичные потенциалы сигнала (уровни серого) отрицательной полярности ("AA") в течение первого и второго периодов строчной развертки и имеет идентичные потенциалы сигнала положительной полярности ("KA") в течение третьего и четвертого периодов строчной развертки. Кроме того, сигнал S, подаваемый на исток во втором кадре, имеет идентичные потенциалы сигнала положительной полярности ("II") во время первых и вторых периодов строчной развертки и имеет идентичные потенциалы сигнала отрицательной полярности ("KI") в течение третьего и четвертого периодов строчной развертки. Между тем, стробирующие сигналы G1-G5 служат в качестве потенциалов "затвор включен" в течение периодов 1H, соответственно, с первого по пятый в активном периоде (в эффективном периоде развертки) каждого кадра и служат в качестве потенциалов "затвор выключен" в течение других периодов.
Затем уровни CS-сигналов CS1-CS5 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G5. В частности, в первом кадре уровень CS-сигналов CS1 и CS2 понижается после понижения уровней соответствующих им стробирующих сигналов соответственно G1 и G2, а уровень CS-сигналов CS3 и CS4 повышается после понижения уровней соответствующих им сигналов соответственно G3 и G4. Следует отметить, что во втором кадре соотношение является обратным, то есть уровень CS-сигналов CS1 и CS2 повышается после понижения уровней соответствующих им стробирующих сигналов соответственно G1 и G2, а уровень CS-сигналов CS3 и CS4 понижается после понижения уровней соответствующих им стробирующих сигналов соответственно G3 и G4.
Таким образом, в жидкокристаллическом устройстве 1 отображения, в котором используют управление отображением с увеличением размера в два раза, электрический потенциал каждого CS-сигнала в тот момент времени, когда понижается уровень стробирующего сигнала, изменяется через каждые две строки в соответствии с полярностью сигнала S, подаваемого на исток; следовательно, в первом кадре все электрические потенциалы Vpix1-Vpix5 электродов 14 пикселей надлежащим образом смещаются CS-сигналами соответственно CS1-CS5. Следовательно, ввод сигналов S, подаваемых на исток, с одинаковым уровнем серого вызывает то, что положительные и отрицательные разности электрического потенциала между электрическим потенциалом противоэлектрода и смещенным электрическим потенциалом каждого из электродов 14 пикселей равны друг другу. То есть, в первом кадре, в котором в пиксели, соответствующие двум смежным строкам в одном и том же столбце пикселей, записывают сигнал, подаваемый на исток, который имеет отрицательную полярность и одинаковый электрический потенциал (уровень серого), а в пиксели, соответствующие двум смежным пикселям рядом с этими двумя строками в том же самом столбце пикселей, записывают сигнал, подаваемый на исток, который имеет положительную полярность и одинаковый электрический потенциал (уровень серого), причем электрические потенциалы CS-сигналов, соответствующих первым двум строкам, не инвертируют по полярности во время записи в пиксели, соответствующие первым двум строкам, инвертируют по полярности в отрицательном направлении после записи и не инвертируют по полярности до следующей записи, а электрические потенциалы CS-сигналов, соответствующих следующим двум строкам, не инвертируют по полярности во время записи в пиксели, соответствующие следующим двум строкам, инвертируют по полярности в положительном направлении после записи и не инвертируют по полярности до следующей записи. Это обеспечивает реализацию управления с инверсией двух строк при ЗС-управлении.
Кроме того, вышеописанная конфигурация позволяет смещать электрические потенциалы Vpix1-Vpix5 электродов 14 пикселей надлежащим образом соответствующими CS-сигналами CS1-CS5 даже в случае управления отображением с увеличением размера в два раза (управления с инверсией двух строк). Это позволяет обеспечивать равные друг другу электрические потенциалы электродов 14 пикселей, на которые подают сигнал с одинаковым потенциалом, что позволяет устранить возникновение поперечных полос, показанных на чертеже Фиг. 64.
Здесь описана конкретная конфигурация схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
На чертеже Фиг. 3 показана конфигурация схемы 30 управления шинами затворов и схемы 40 управления CS-шинами. Схема 40 управления CS-шинами включает в себя множество CS-схем 41, 42, 43,... и 4n, соответствующих надлежащим строкам. CS-схемы 41, 42, 43,... и 4n включают в себя соответствующие схемы 41a, 42a, 43a,... и 4na D-защелок; и соответствующие схемы (логические схемы) "ИЛИ" 41b, 42b, 43b,... и 4nb. Схема 30 управления шинами затворов включает в себя множество схем SR1, SR2, SR3,... и SRn сдвиговых регистров. Здесь следует отметить следующее: несмотря на то, что на чертеже Фиг. 3 схема 30 управления шинами затворов и схема 40 управления CS-шинами расположены на одной стороне жидкокристаллической панели отображения, это не является ограничивающим признаком. Схема 30 управления шинами затворов и схема 40 управления CS-шинами могут быть расположены на соответствующих различных сторонах жидкокристаллической панели отображения.
Входными сигналами, которые подают в CS-схему 41, являются выходные сигналы SRO1 и SRO2 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G1 и G2, сигнал CMI1 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 42, являются выходные сигналы SRO2 и SRO3 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G2 и G3, сигнал CMI2 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 43, являются выходные сигналы SRO3 и SRO4 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G3 и G4, сигнал CMI1 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 44, являются выходные сигналы SRO4 и SRO5 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G4 и G5, сигнал CMI2 полярности и сигнал сброса "RESET". Как описано выше, каждая CS-схема принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке, и принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждую строку. Сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные через каждые два периода строчной развертки, и являются сдвинутыми по фазе один относительно другого на один период строчной развертки (см. Фиг. 4). Сигналы CMI1 и CMI2 полярности и сигнал сброса "RESET" подают из управляющей схемы 50.
Ниже для удобства описания в качестве примера взяты, главным образом, CS-схемы 42 и 43, которые соответствуют, второй и третьей строкам, соответственно.
Схема 42a D-триггера принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса, принимает сигнал CMI2 полярности (целевой сигнал удержания) через свой контакт D для ввода данных (вторая секция ввода) и принимает выходной сигнал из логической схемы 42b "ИЛИ" через свой контакт CK для сигнала синхронизации (первая секция ввода). В соответствии с изменением (с низкого уровня до высокого уровня или с высокого уровня до низкого уровня) уровня электрического потенциала сигнала, который она принимает через свой контакт CK для сигнала синхронизации схема 42a D-триггера выводит в качестве CS-сигнала CS2, указывающего изменение уровня электрического потенциала, состояние ввода (низкий уровень или высокий уровень) сигнала CMI2 полярности, который она принимает через свой контакт D для ввода данных.
В частности, когда уровень электрического потенциала сигнала, который схема 42a D-триггера принимает через свой контакт CK для сигнала синхронизации, является высоким, схема 42a D-триггера выводит состояние ввода (низкий уровень или высокий уровень) сигнала CMI2 полярности, который она принимает через свой контакт D. Когда произошло изменение уровня электрического потенциала сигнала, который схема 42a D-триггера принимает через ее контакт CK для сигнала синхронизации, с высокого уровня на низкий уровень, то триггерная схема 42a фиксирует состояние ввода (низкий уровень или высокий уровень) сигнала полярности CMI2, который она принимает через свой контакт D в момент изменения, и сохраняет зафиксированное состояние до следующего раза, когда уровень электрического потенциала сигнала, который триггерная схема 42a принимает через свой контакт CK для сигнала синхронизации, повышается до высокого уровня. Затем схема 42a D-триггера выводит CS-сигнал CS2, который указывает изменение уровня электрического потенциала через ее выходной контакт Q.
Аналогичным образом, схема 43a D-триггера принимает повторно переданный сигнал сброса "RESET" через свой контакт CL для сигнала сброса, и принимает сигнал CMI1 полярности через свой контакт D для ввода данных. Между тем схема 43a D-триггера принимает через свой контакт CK для сигнала синхронизации выходной сигнал из логической схемы 43b "ИЛИ". Это вызывает то, что схема 43a D-триггера выводит через ее выходной контакт Q (секция вывода) CS-сигнал CS3, который указывает изменение уровня электрического потенциала.
Логическая схема 42b "ИЛИ" принимает выходной сигнал SRO2 из схемы сдвигового регистра SR2 в соответствующей ей строке и выходной сигнал SRO3 из схемы сдвигового регистра SR3 в следующей строке, и, таким образом, выводит сигнал M2, показанный на чертеже Фиг. 5. Кроме того, логическая схема 43b "ИЛИ" принимает выходной сигнал SRO3 из схемы SR3 сдвигового регистра в соответствующей ей строке и выходной сигнал SRO4 из схемы SR4 сдвигового регистра в следующей строке, и, таким образом, выводит сигнал M3, показанный на чертеже Фиг. 5.
Выходной сигнал SRO из сдвигового регистра, который подают в каждую логическую схему "ИЛИ", сгенерирован известным способом в схеме 30 управления шинами затворов (см. Фиг. 3), которая включает в себя схемы D-триггеров. Схема 30 управления шинами затворов последовательно сдвигает импульс GSP включения затвора, который подают из управляющей схемы 50 в схему SR сдвигового регистра в следующем каскаде при привязке по времени, когда стробирующий тактовый импульс GCK имеет частоту, равную одному периоду строчной развертки.
На чертеже Фиг. 5 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 1 отображения из первого примера и выводят из нее.
Во-первых, ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI2 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем на контакт CK для сигнала синхронизации подают изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, уровень электрического потенциала CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент времени, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, подаваемого на контакт CK для сигнала синхронизации (то есть в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO3 из сдвигового регистра, который был сдвинут в третью строку в схеме 30 управления шинами затворов. Выходной сигнал SRO3 из сдвигового регистра также подают на один контакт логической схемы 43b "ИЛИ" в CS-схеме 43.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 42a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 42a D-триггера передает состояние ввода (низкий уровень) сигнала CMI2 полярности, принятого ею через ее контакт D в течение промежутка времени, когда уровень выходного сигнала SRO2 из сдвигового регистра в сигнале M2 является высоким, фиксирует состояние ввода (низкий уровень) сигнала CMI2 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра, и затем сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в следующий раз.
Затем, после приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Затем схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в третьем кадре.
Следует отметить, что в первой строке сигнал CMI1 полярности является зафиксированным в соответствии с выходными сигналами SRO1 и SRO2 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS1, показанный на чертеже Фиг. 5.
Затем, ниже приведено описание изменений форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS3, который схема 43a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра, соответствующий стробирующему сигналу G3, который подают на шину 12 затворов в третьей строке, выводят из схемы SR3 сдвигового регистра и подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 схема 43a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. Затем схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня.
Затем на другой контакт логической схемы 43b "ИЛИ" подают выходной сигнал SRO4 из сдвигового регистра, который был сдвинут в четвертую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO4 из сдвигового регистра также подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации, и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра. Схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 43a D-триггера передает состояние ввода (высокий уровень) сигнала CMI1 полярности, принятого ею через ее контакт D в течение промежутка времени, когда уровень выходного сигнала SRO3 из сдвигового регистра в сигнале M3 является высоким, фиксирует состояние ввода (высокий уровень) сигнала CMI1 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра, и затем сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня в следующий раз.
Затем схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра через свой контакт CK для сигнала синхронизации, и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра.
Затем схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня в третьем кадре.
Следует отметить, что в четвертой строке сигнал CMI2 полярности является зафиксированным в соответствии с выходными сигналами SRO4 и SRO5 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS4, показанный на чертеже Фиг. 5.
Как описано выше, каждая из CS-схем 41, 42, 43,... и 4n, соответствующая надлежащим строкам, позволяет в каждом кадре при управлении с инверсией двух строк переключать электрический потенциал CS-сигнала в тот момент времени, когда уровень стробирующего сигнала в соответствующей строке понижается (в момент времени, когда TFT13 переключается из состояния "включен" в состояние "выключен") с высокого уровня до низкого уровня после понижения уровня стробирующего сигнала в этой строке.
То есть, в первом примере (i) CS-сигнал CSn, подаваемый на CS-шину 15 в строке номер n, сгенерирован путем фиксации уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала Gn в строке номер n, и уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+1) в строке номер (n+1), и (ii) CS-сигнал CSn+1, подаваемый на CS-шину 15 в строке номер (n+1), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+1) в строке номер (n+1), и уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+2) в строке номер (n+2). Кроме того, (iii) CS-сигнал CSn+2, подаваемый на CS-шину 15 в строке номер (n+2), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+2) в строке номер (n+2), и уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+3) в строке номер (n+3), и (iv) CS-сигнал CSn+3, подаваемый на CS-шину 15 в строке номер (n+3), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+3) в строке номер (n+3), и уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+4) в строке номер (n+4).
Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в жидкокристаллическом устройстве 1 отображения, в котором используют управление отображением с увеличением размера в два раза. Соответственно, можно устранить неправильные формы сигнала, которые вызывают возникновение поперечных полос. Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, можно улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигналы CMI1 и CMI2 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 6 показаны соотношения между (i) сигналом CMI1 (или CMI2) полярности и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами CSn, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 6, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность (положительную полярность или отрицательную полярность) в течение этого периода строчной развертки. Например, сигнал CMI1 имеет отрицательную полярность в течение второго периода "B" строчной развертки, имеет отрицательную полярность в течение третьего периода "C" строчной развертки, имеет положительную полярность в течение четвертого периода "D" строчной развертки и имеет положительную полярность в течение пятого периода "E" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1-го по 12-й соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI2 имеет положительную полярность в течение первого периода "1" строчной развертки, имеет положительную полярность в течение второго периода "2" строчной развертки, имеет отрицательную полярность в течение третьего периода "3" строчной развертки и имеет отрицательную полярность в течение четвертого периода "4" строчной развертки. Таким образом, сигналы CMI1 и CMI2 инвертируют свою полярность через каждые два периода строчной развертки, и являются сдвинутыми по фазе один относительно другого на один период строчной развертки. Каждая из CS-схем 4n принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждую строку. Например, CS-схема 41 принимает сигнал CMI1, CS-схема 42 принимает сигнал CMI2, а CS-схема 43 принимает сигнал CMI1 (см. чертеж Фиг. 3).
CS-схема 4n принимает, через свой контакт CK для сигнала синхронизации, выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке номер (n+1). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение (n+1)-го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "B" сигнала CMI1 в течение второго периода строчной развертки. CS-схема 42 устанавливает положительную полярность "2" сигнала CMI2 в течение второго периода строчной развертки и устанавливает отрицательную полярность "3" сигнала CMI2 в течение третьего периода строчной развертки. CS-схема 43 устанавливает отрицательную полярность "C" сигнала CMI1 в течение третьего периода строчной развертки и устанавливает положительную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "4" сигнала CMI2 в течение четвертого периода строчной развертки и устанавливает положительную полярность "5" сигнала CMI2 в течение пятого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг. 4 и Фиг. 5.
ВТОРОЙ ПРИМЕР
На чертеже Фиг. 7 изображена временная диаграмма, на которой показаны формы различных сигналов при управлении отображением с увеличением размера в три раза в жидкокристаллическом устройстве 1 отображения, показанном на чертеже Фиг. 3. На чертеже Фиг. 7 сигналы CMI1 и CMI2 инвертируют свои полярности при иных привязках по времени, чем на чертеже Фиг. 4.
Как показано на чертеже Фиг. 7, во время исходного состояния все CS-сигналы CS1-CS7 имеют один фиксированный электрический потенциал (на чертеже Фиг. 7 - низкий уровень). В первом кадре уровень CS-сигнала CS1 в первой строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G1. Уровень CS-сигнала CS2 во второй строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G2. Уровень CS-сигнала CS3 в третьей строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G3. В отличие от этого, уровень CS-сигнала CS4 в четвертой строке является низким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G4, и уровень CS-сигнала CS5 в пятой строке является низким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G5. Уровень CS-сигнала CS6 в шестой строке является низким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G6. Уровень CS-сигнала CS7 в седьмой строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G7.
Следует отметить, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и который изменяет свою полярность на обратную через каждые три периода строчной развертки (3H). Сигнал S, подаваемый на исток, имеет одинаковый электрический потенциал в течение трех смежных периодов строчной развертки (3H), и имеет одинаковый электрический потенциал в течение следующих трех смежных периодов строчной развертки (3H). То есть, каждая из ссылочных позиций с "AA" по "SA", показанных на чертеже Фиг. 7, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, сигнал S, подаваемый на исток в первом кадре, имеет идентичные потенциалы сигнала отрицательной полярности ("AA") в течение первого, второго и третьего периодов строчной развертки, и имеет идентичные потенциалы сигнала положительной полярности ("KA") в течение четвертого, пятого и шестого периодов строчной развертки. Кроме того, сигнал S, подаваемый на исток во втором кадре, имеет идентичные потенциалы сигнала положительной полярности ("II") в течение первого, второго и третьего периодов строчной развертки, и имеет идентичные потенциалы сигнала отрицательной полярности ("KI") в течение четвертого, пятого и шестого периодов строчной развертки. Между тем, стробирующие сигналы G1-G7 служат в качестве потенциалов "затвор включен" в течение периодов 1H, соответственно, с первого по седьмой в активном периоде (в эффективном периоде развертки) каждого кадра, и служат в качестве потенциалов "затвор выключен" в течение других периодов.
Затем уровни CS-сигналов CS1-CS7 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G7. В частности, в первом кадре уровень CS-сигналов CS1, CS2 и CS3 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G4, G5 и G6. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровень CS-сигналов CS1, CS2 и CS3 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G4, G5 и G6.
Таким образом, в жидкокристаллическом устройстве 1 отображения, в котором используется управление отображением с увеличением размера в три раза, электрический потенциал каждого CS-сигнала в тот момент времени, когда понижается уровень стробирующего сигнала, изменяется через каждые три строки в соответствии с полярностью сигнала S, подаваемого на исток; следовательно, в первом кадре все электрические потенциалы Vpix1-Vpix7 электродов 14 пикселей надлежащим образом смещены CS-сигналами, соответственно, CS1-CS7. Следовательно, ввод сигналов S, подаваемых на исток, с одинаковым уровнем серого вызывает то, что положительные и отрицательные разности электрического потенциала между электрическим потенциалом противоэлектрода и смещенным электрическим потенциалом каждого из электродов 14 пикселей являются равными друг другу. То есть, в первом кадре, в котором в пиксели, соответствующие трем смежным строкам в одном и том же столбце пикселей, записывают сигнал, подаваемый на исток, который имеет отрицательную полярность и тот же самый электрический потенциал (уровень серого), а в пиксели, соответствующие трем смежным строкам рядом с этими тремя строками в том же самом столбце пикселей, записывают сигнал, подаваемый на исток, который имеет положительную полярность и тот же самый электрический потенциал (уровень серого), электрические потенциалы CS-сигналов, соответствующих первым трем строкам, не инвертируют по полярности во время записи в пиксели, соответствующие первым трем строкам, инвертируют по полярности в отрицательном направлении после записи, и не инвертируют по полярности до следующей записи, а электрические потенциалы CS-сигналов, соответствующих следующим трем строкам, не инвертируют по полярности во время записи в пиксели, соответствующие следующим трем строкам, инвертируют по полярности в положительном направлении после записи и не инвертируют по полярности до следующей записи. Это обеспечивает реализацию управления с инверсией трех строк при ЗС-управлении.
Кроме того, вышеописанная конфигурация позволяет обеспечить надлежащее смещение электрических потенциалов Vpix1-Vpix7 электродов 14 пикселей CS-сигналами, соответственно, CS1-CS7 даже в случае управления отображением с увеличением размера в три раза (управления с инверсией трех строк). Это позволяет обеспечить одинаковый друг с другом электрический потенциал на электродах 14 пикселей, на которые подают одинаковый потенциал сигнала, что позволяет устранить возникновение поперечных полос, показанных на чертеже Фиг. 64. В результате качество отображения может быть улучшено.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
Согласно схеме 30 управления шинами затворов и схеме 40 управления CS-шинами из второго примера, сигналы CMI1 и CMI2 полярности изменяют свою полярность на обратную при иных привязках по времени, чем в первом примере. Другие конфигурации являются такими же, как и конфигурация, показанная на чертеже Фиг. 3. Каждая CS-схема принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке, и принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждую строку. Сигналы CMI1 и CMI2 полярности заданы так, что изменяют свои полярности на обратные при привязках по времени, показанных на чертеже Фиг. 7.
В приведенном ниже описании, со ссылкой на чертежи Фиг. 7 и Фиг. 8, рассмотрено жидкокристаллическое устройство 1 отображения, в котором используется управление отображением с увеличением размера в три раза. В приведенном ниже описании опущены описания соединений в схеме 30 управления шинами затворов и в схеме 40 управления CS-шинами. На чертеже Фиг. 8 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 1 отображения из второго примера и выводят из нее. Ниже для удобства описания операции, выполняемые в первом кадре, объяснены на примере CS-схем 42, 43 и 44, которые соответствуют, соответственно, второй, третьей и четвертой строкам.
Сначала ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI2 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, уровень электрического потенциала CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO3 из сдвигового регистра, который был сдвинут в третью строку в схеме 30 управления шинами затворов. Выходной сигнал SRO3 из сдвигового регистра также подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в момент изменения уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 42a D-триггера выводит низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через его контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 42a D-триггера передает состояние ввода (низкий уровень) сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO2 из сдвигового регистра в сигнале M2 является высоким, фиксирует состояние ввода (низкий уровень) сигнала CMI2 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра, и затем сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в следующий раз.
Затем, после приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 42a D-триггера выводит высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в третьем кадре.
Следует отметить, что в первой строке сигнал CMI1 полярности является зафиксированным в соответствии с выходными сигналами SRO1 и SRO2 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS1, показанный на чертеже Фиг. 8.
Затем, ниже приведено описание изменений форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, то электрический потенциал CS-сигнала CS3, который схема 43a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра, соответствующий стробирующему сигналу G3, который должен быть подан на шину 12 затворов в третьей строке, выводят из схемы SR3 сдвигового регистра и подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43. Затем на контакт CK для сигнала синхронизации подают изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 схема 43a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Затем схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня.
Затем на другой контакт логической схемы 43b "ИЛИ" подают выходной сигнал SRO4 из сдвигового регистра, который был сдвинут в четвертую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO4 из сдвигового регистра также подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра. Схема 43a D-триггера выводит низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 43a D-триггера передает состояние ввода (низкий уровень) сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO3 из сдвигового регистра в сигнале M3 является высоким, фиксирует состояние ввода (низкий уровень) сигнала CMI1 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра, и затем сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня в следующий раз.
Затем после приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 43a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 43a D-триггера выводит высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра через его контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня в третьем кадре.
Затем, ниже приведено описание изменений форм различных сигналов в четвертой строке. Во время исходного состояния схема 44a D-триггера в CS-схеме 44 принимает сигнал CMI2 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS4, который схема 44a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO4 из сдвигового регистра для четвертой строки выводят из схемы SR4 сдвигового регистра и подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 44a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. Схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня.
Затем на другой контакт логической схемы 44b "ИЛИ" подают выходной сигнал SRO5 из сдвигового регистра, который был сдвинут в пятую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO5 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 45.
Схема 44a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра. Схема 44a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 44a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 44a D-триггера передает состояние ввода (высокий уровень) сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO4 из сдвигового регистра в сигнале M4 является высоким, фиксирует состояние ввода (высокий уровень) сигнала CMI2 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра, и затем сохраняет этот высокий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня в следующий раз.
Затем, после приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 44a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра.
Затем схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояния ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня в третьем кадре.
Описанные выше операции (i) в строках с первой по третью вызывают понижение электрических потенциалов CS-сигналов после понижения уровней стробирующих сигналов в этих строках в те моменты времени, когда стробирующие сигналы в соответствующих им строках понижаются (то есть, в те моменты времени, когда тонкопленочные транзисторы (TFT) 13 переключаются из состояния "включено" в состояние "выключено"), и (ii) в строках с четвертой по шестую вызывают повышение электрических потенциалов CS-сигналов после понижения уровней стробирующих сигналов в этих строках в те моменты времени, когда стробирующие сигналы в соответствующих им строках понижаются (то есть, в те моменты времени, когда тонкопленочные транзисторы (TFT) 13 переключаются из состояния "включено" в состояние "выключено") (см. чертежи Фиг. 7 и Фиг. 8).
Как было описано выше, согласно второму примеру управление с инверсией трех строк (3H) может быть реализовано путем регулирования, в жидкокристаллическом устройстве 1 отображения, сконфигурированном так, как показано на чертеже Фиг. 3, тех привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные. Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в том жидкокристаллическом устройстве 1 отображения, в котором используется управление отображением с увеличением размера в три раза. Соответственно, можно устранить неправильные формы сигналов, которые вызывают возникновение поперечных полос. Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, таким образом, можно улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигналы CMI1 и CMI2 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 9 показаны соотношения между (i) сигналом CMI1 (или CMI2) полярности и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами CSn, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 9, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI1 имеет отрицательную полярность в течение второго периода "B" строчной развертки, имеет положительную полярность в течение третьего периода "C" строчной развертки, имеет отрицательную полярность в течение четвертого периода "D" строчной развертки и имеет отрицательную полярность в течение пятого периода "E" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1-го по 12-й соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI2 имеет положительную полярность в течение первого периода "1" строчной развертки, имеет положительную полярность в течение второго периода "2" строчной развертки, имеет отрицательную полярность в течение третьего периода "3" строчной развертки и имеет отрицательную полярность в течение четвертого периода "4" строчной развертки. Каждая из CS-схем 4n принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждую строку. Например, CS-схема 41 принимает сигнал CMI1, CS-схема 42 принимает сигнал CMI2, а CS-схема 43 принимает сигнал CMI1.
CS-схема 4n принимает, через свой контакт CK для сигнала синхронизации, выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке номер (n+1). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение (n+1)-го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "B" сигнала CMI1 в течение второго периода строчной развертки. CS-схема 42 устанавливает положительную полярность "2" сигнала CMI2 в течение второго периода строчной развертки и устанавливает отрицательную полярность "3" сигнала CMI2 в течение третьего периода строчной развертки. CS-схема 43 устанавливает положительную полярность "C" сигнала CMI1 в течение третьего периода строчной развертки и устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "4" сигнала CMI2 в течение четвертого периода строчной развертки и устанавливает положительную полярность "5" сигнала CMI2 в течение пятого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг. 7 и Фиг. 8.
Как был описан в первом и втором примерах, даже согласно жидкокристаллическому устройству 1 отображения, показанному на чертеже Фиг. 3, управление с инверсией двух строк (2H) и управление с инверсией трех строк (3H) могут быть осуществлены с использованием двух сигналов CMI1 и CMI2 полярности, которые изменяют свои полярности на обратные одновременно или в соответственные разные привязки по времени. Аналогичным образом, управление с инверсией четырех строк (4H),... и n строк (nH) может быть реализовано путем регулировки привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные. Это позволяет осуществлять управление отображением с увеличением размера в два раза и управление отображением с увеличением размера в три раза. Аналогичным образом, управление отображением с увеличением размера в четыре раза,..., с увеличением размера в n раз может быть реализовано путем регулировки привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные.
ТРЕТИЙ ПРИМЕР
В каждом из первого и второго примеров рассмотрена конфигурация, в которой CS-схема 4n в строке номер n принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке номер (n+1). Однако следует отметить, что жидкокристаллическое устройство 1 отображения из настоящего изобретения не ограничено этим вариантом. Например, как показано на чертеже Фиг. 10, жидкокристаллическое устройство 1 отображения может быть сконфигурировано так, что CS-схема 4n в строке номер n принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+2 из сдвигового регистра в строке номер (n+2). То есть, CS-схема 41 принимает выходной сигнал SRO1 из сдвигового регистра в соответствующей строке и выходной сигнал SRO3 из сдвигового регистра в третьей строке. На чертеже Фиг. 11 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве 1 отображения, которое сконфигурировано так, как изложено выше, и выполняет отображение с увеличением размера в два раза. Как показано на чертеже Фиг. 11, во время исходного состояния все CS-сигналы CS1-CS5 имеют один фиксированный электрический потенциал (на чертеже Фиг. 11 - низкий уровень). В первом кадре уровень CS-сигнала CS1 в первой строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G1. Уровень CS-сигнала CS2 во второй строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G2. Уровень CS-сигнала CS3 в третьей строке является низким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G3. Уровень CS-сигнала CS4 в четвертой строке является низким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G4. Уровень CS-сигнала CS5 в пятой строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G5. Сигнал S, подаваемый на исток, представляет собой сигнал, амплитуда которого соответствует уровню серого, представленному видеосигналом, и который изменяет свою полярность на обратную через каждые 2H периодов.
Затем уровни CS-сигналов CS1-CS5 переключаются между высоким и низким уровнями электрического потенциала после понижения уровней соответствующих им стробирующих сигналов G1-G5. В частности, в первом кадре уровни CS-сигналов CS1 и CS2 понижаются после понижения уровней соответствующих им стробирующих сигналов, соответственно, G1 и G2, а уровни CS-сигналов CS3 и CS4 повышаются после понижения уровней соответствующих им стробирующих сигналов, соответственно, G3 и G4. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровни CS-сигналов CS1 и CS2 повышаются после понижения уровней соответствующих им стробирующих сигналов, соответственно, G1 и G2, а уровни CS-сигналов CS3 и CS4 понижаются после понижения уровней соответствующих им стробирующих сигналов, соответственно, G3 и G4.
Это обеспечивает реализацию управления с инверсией двух строк (2H) и устраняет возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшает качество отображения.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
Входными сигналами, которые подают в CS-схему 41, являются выходные сигналы SRO1 и SRO3 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G1 и G3, сигнал CMI1 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 42, являются выходные сигналы SRO2 и SRO4 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G2 и G4, сигнал CMI1 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 43, являются выходные сигналы SRO3 и SRO5 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G3 и G5, сигнал CMI2 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 44, являются выходные сигналы SRO4 и SRO6 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G4 и G6, сигнал CMI2 полярности и сигнал сброса "RESET". Каждая CS-схема принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые две строки. То есть, как описано выше, каждая из CS-схем 41 и 42 принимает сигнал CMI1, каждая из CS-схем 43 и 44 принимает сигнал CMI2, а каждая из CS-схем 45 и 46 принимает сигнал CMI1. Сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные через каждые два периода строчной развертки и имеют одинаковую фазу. Следовательно, согласно настоящему примеру, может быть использована конфигурация, в которой используется только один из сигналов CMI1 и CMI2 полярности, и его подают в каждую CS-схему.
Ниже для удобства описания операции, выполняемые в первом кадре, объяснены, главным образом, на примере CS-схем 42 и 43, которые соответствуют, соответственно, второй и третьей строкам. На чертеже Фиг. 12 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 1 отображения из третьего примера и выводят из нее.
Сначала ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO4 из сдвигового регистра, который был сдвинут в четвертую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO4 из сдвигового регистра также подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра. Схема 42a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI1 полярности принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Затем, ниже приведено описание изменений форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI2 полярности через свой контакт D для ввода данных и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS3, который схема 43a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра в третьей строке выводят из схемы SR3 сдвигового регистра и подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 схема 43a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. Затем схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня.
Затем на другой контакт логической схемы 43b "ИЛИ" подают выходной сигнал SRO5 из сдвигового регистра, который был сдвинут в пятую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO4 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 45.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра. Схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Как было описано выше, согласно третьему примеру, (i) CS-сигнал CSn, подаваемый на CS-шину 15 в строке номер n, сгенерирован путем фиксации уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала Gn в строке номер n, и уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+2) в строке номер (n+2), и (ii) CS-сигнал, подаваемый на CS-шину 15 в строке номер (n+1), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+1) в строке номер (n+1), и уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+3) в строке номер (n+3). Кроме того, (iii) CS-сигнал, подаваемый на CS-шину 15 в строке номер (n+2), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+2) в строке номер (n+2), и уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+4) в строке номер (n+4), и (iv) CS-сигнал, подаваемый на CS-шину 15 в строке номер (n+3), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+3) в строке номер (n+3), и уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+5) в строке номер (n+5).
Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в жидкокристаллическом устройстве 1 отображения, в котором используют управление отображением с увеличением размера в два раза. Соответственно, можно устранить неправильные формы сигнала, которые вызывают возникновение поперечных полос. Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигналы CMI1 и CMI2 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 13 показаны соотношения между (i) сигналом CMI1 (или CMI2) полярности и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами CSn, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 13, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI1 имеет положительную полярность в течение второго периода "B" строчной развертки, имеет отрицательную полярность в течение третьего периода "C" строчной развертки, имеет отрицательную полярность в течение четвертого периода "D" строчной развертки и имеет положительную полярность в течение пятого периода "E" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1-го по 12-й соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI2 имеет положительную полярность в течение первого периода "1" строчной развертки, имеет положительную полярность в течение второго периода "2" строчной развертки, имеет отрицательную полярность в течение третьего периода "3" строчной развертки и имеет отрицательную полярность в течение четвертого периода "4" строчной развертки. Каждая из CS-схем 4n принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые две строки. Например, каждая из CS-схем 41 и 42 принимает сигнал CMI1, каждая из CS-схем 43 и 44 принимает сигнал CMI2, и каждая из CS-схем 45 и 46 принимает сигнал CMI1.
CS-схема 4n принимает, через свой контакт CK для сигнала синхронизации, выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+2 из сдвигового регистра в строке номер (n+2). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение (n+2)-го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "C" сигнала CMI1 в течение третьего периода строчной развертки. CS-схема 42 устанавливает положительную полярность "B" сигнала CMI1 в течение второго периода строчной развертки и устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки. CS-схема 43 устанавливает отрицательную полярность "3" сигнала CMI2 в течение третьего периода строчной развертки и устанавливает положительную полярность "5" сигнала CMI2 в течение пятого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "4" сигнала CMI2 в течение четвертого периода строчной развертки, и устанавливает положительную полярность "6" сигнала CMI2 в течение шестого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг. 11 и Фиг. 12.
ЧЕТВЕРТЫЙ ПРИМЕР
На чертеже Фиг. 14 изображена временная диаграмма, на которой показаны формы различных сигналов при управлении отображением с увеличением размера в три раза, в жидкокристаллическом устройстве 1 отображения, показанные на чертеже Фиг. 10. На чертеже Фиг. 14 сигналы CMI1 и CMI2 изменяют свои полярности на обратные при иных привязках по времени, чем на чертеже Фиг. 11.
Как показано на чертеже Фиг. 14, во время исходного состояния все CS-сигналы CS1-CS7 имеют один фиксированный электрический потенциал (на чертеже Фиг. 14 - низкий уровень). В первом кадре уровень CS-сигнала CS1 в первой строке повышается в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G1. Уровень CS-сигнала CS2 во второй строке повышается в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G2. Уровень CS-сигнала CS3 в третьей строке повышается в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G3. В отличие от этого уровень CS-сигнала CS4 в четвертой строке понижается в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G4. Уровень CS-сигнала CS5 в пятой строке понижается в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G5. Уровень CS-сигнала CS6 в шестой строке понижается в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G6. Уровень CS-сигнала CS7 в седьмой строке повышается в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G7.
Следует отметить, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и который изменяет его полярность на обратную через каждые три периода строчной развертки (3H). Сигнал S, подаваемый на исток, имеет одинаковый электрический потенциал в течение трех смежных периодов строчной развертки (3H) и имеет одинаковый электрический потенциал в течение следующих трех смежных периодов строчной развертки (3H). То есть, каждая из ссылочных позиций с "AA" по "SA", показанных на чертеже Фиг. 14, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, сигнал S, подаваемый на исток в первом кадре, имеет идентичные потенциалы сигнала (уровень серого) отрицательной полярности ("AA") в течение первого, второго и третьего периодов строчной развертки, и имеет идентичные потенциалы сигнала положительной полярности ("KA") в течение четвертого, пятого и шестого периодов строчной развертки. Кроме того, сигнал S, подаваемый на исток во втором кадре, имеет идентичные потенциалы сигнала положительной полярности ("II") в течение первого, второго и третьего периодов строчной развертки, и имеет идентичные потенциалы сигнала отрицательной полярности ("KI") в течение четвертого, пятого и шестого периодов строчной развертки. Между тем, стробирующие сигналы G1-G7 служат в качестве потенциалов "затвор включен" в течение периодов 1H, соответственно, с первого по седьмой в активном периоде (в эффективном периоде развертки) каждого кадра, и служат в качестве потенциалов "затвор выключен" в течение других периодов.
Затем уровни CS-сигналов CS1-CS7 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G7. В частности, в первом кадре уровень CS-сигналов CS1, CS2 и CS3 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G4, G5 и G6. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровень CS-сигналов CS1, CS2 и CS3 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G4, G5 и G6.
Таким образом, в жидкокристаллическом устройстве 1 отображения, в котором используется управление отображением с увеличением размера в три раза, электрический потенциал каждого CS-сигнала в тот момент времени, когда понижается уровень стробирующего сигнала, изменяется через каждые три строки в соответствии с полярностью сигнала S, подаваемого на исток; следовательно, в первом кадре все электрические потенциалы Vpix1-Vpix7 электродов 14 пикселей надлежащим образом смещены CS-сигналами, соответственно, CS1-CS7. Следовательно, ввод сигналов S, подаваемых на исток, с одинаковым уровнем серого вызывает то, что положительные и отрицательные разности электрического потенциала между электрическим потенциалом противоэлектрода и смещенным электрическим потенциалом каждого из электродов 14 пикселей являются равными друг другу. То есть, в первом кадре, в котором в пиксели, соответствующие трем смежным строкам в одном и том же столбце пикселей, записывают сигнал, подаваемый на исток, который имеет отрицательную полярность и тот же самый электрический потенциал, а в пиксели, соответствующие трем смежным строкам рядом с этими тремя строками в том же самом столбце пикселей, записывают сигнал, подаваемый на исток, который имеет положительную полярность и тот же самый электрический потенциал, электрические потенциалы CS-сигналов, соответствующих первым трем строкам, не инвертируют по полярности во время записи в пиксели, соответствующие первым трем строкам, инвертируют по полярности в отрицательном направлении после записи и не инвертируют по полярности до следующей записи, а электрические потенциалы CS-сигналов, соответствующих следующим трем строкам, не инвертируют по полярности во время записи в пиксели, соответствующие следующим трем строкам, инвертируют по полярности в положительном направлении после записи и не инвертируют по полярности до следующей записи. Это обеспечивает реализацию управления с инверсией трех строк при ЗС-управлении.
Кроме того вышеописанная конфигурация позволяет обеспечить надлежащее смещение электрических потенциалов Vpix1-Vpix7 электродов 14 пикселей CS-сигналами, соответственно, CS1-CS7 даже в случае управления отображением с увеличением размера в три раза (управления с инверсией трех строк). Это позволяет обеспечить одинаковый друг с другом электрический потенциал на электродах 14 пикселей, на которые подают одинаковый потенциал сигнала, что позволяет устранить возникновение поперечных полос, показанных на чертеже Фиг. 64.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
Согласно схеме 30 управления шинами затворов и схеме 40 управления CS-шинами из четвертого примера, сигналы CMI1 и CMI2 изменяют свои полярности на обратные при иных привязках по времени, чем в третьем примере. Другие конфигурации являются такими же, как и конфигурация, показанная на чертеже Фиг. 10. Каждая CS-схема принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+2 из сдвигового регистра в строке номер (n+2), и принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые две строки. То есть, как описано выше, каждая из CS-схем 41 и 42 принимает сигнал CMI1, каждая из CS-схем 43 и 44 принимает сигнал CMI2, и каждая из CS-схем 45 и 46 принимает сигнал CMI1. Сигналы CMI1 и CMI2 полярности заданы так, что изменяют свои полярности на обратные при привязках по времени, показанных на чертеже Фиг. 14.
В приведенном ниже описании, со ссылкой на чертежи Фиг. 14 и Фиг. 15, рассмотрено жидкокристаллическое устройство 1 отображения, в котором используется управление отображением с увеличением размера в три раза. В приведенном ниже описании опущены описания соединений в схеме 30 управления шинами затворов и в схеме 40 управления CS-шинами. На чертеже Фиг. 15 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 1 отображения из четвертого примера и выводят из нее. Ниже для удобства описания операции, выполняемые в первом кадре, объяснены, главным образом, на примере CS-схем 42, 43 и 44, которые соответствуют, соответственно, второй, третьей и четвертой строкам.
Сначала ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO4 из сдвигового регистра, который был сдвинут в четвертую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO4 из сдвигового регистра также подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра. Схема 42a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Затем, ниже приведено описание изменений форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI2 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS3, который схема 43a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра, соответствующий стробирующему сигналу G3, который должен быть подан на шину 12 затворов в третьей строке, выводят из схемы SR3 сдвигового регистра и подают на один из контактов логической схемы 43b "ИЛИ" в CS-схемы 43. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 схема 43a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Затем схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня.
Затем на другой контакт логической схемы 43b "ИЛИ" подают выходной сигнал SRO5 из сдвигового регистра, который был сдвинут в пятую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO5 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 45.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра. Схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Затем, ниже приведено описание изменений форм различных сигналов в четвертой строке. Во время исходного состояния схема 44a D-триггера в CS-схеме 44 принимает сигнал CMI2 полярности через свой контакт D для ввода данных и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS4, который схема 44a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO4 из сдвигового регистра в четвертой строке выводят из схемы SR4 сдвигового регистра и подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 44a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. Затем схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня.
Затем на другой контакт логической схемы 44b "ИЛИ" подают выходной сигнал SRO6 из сдвигового регистра, который был сдвинут в шестую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO6 из сдвигового регистра также подают на один из контактов логической схемы 46b "ИЛИ" в CS-схеме 46.
Схема 44a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра. Схема 44a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 44a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня во втором кадре.
Описанные выше операции (i) в строках с первой по третью вызывают понижение электрических потенциалов CS-сигналов после понижения уровней стробирующих сигналов в этих строках в те моменты времени, когда стробирующие сигналы в соответствующих им строках понижаются (то есть, в те моменты времени, когда тонкопленочные транзисторы (TFT) 13 переключаются из состояния "включено" в состояние "выключено"), и (ii) в строках с четвертой по шестую вызывают повышение электрических потенциалов CS-сигналов после понижения уровней стробирующих сигналов в этих строках в те моменты времени, когда стробирующие сигналы в соответствующих им строках понижаются (то есть, в те моменты времени, когда тонкопленочные транзисторы (TFT) 13 переключаются из состояния "включено" в состояние "выключено") (см. чертежи Фиг. 14 и Фиг. 15).
Как было описано выше, согласно четвертому примеру управление с инверсией трех строк (3H) может быть реализовано путем регулирования в жидкокристаллическом устройстве отображения, сконфигурированном так, как показано на чертеже Фиг. 10, тех привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные. Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в жидкокристаллическом устройстве 1 отображения, в котором используют управление отображением с увеличением размера в три раза. Соответственно, можно устранить неправильные формы сигнала, которые вызывают возникновение поперечных полос. Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигналы CMI1 и CMI2 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 16 показаны соотношения между (i) сигналом CMI1 (или CMI2) полярности и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами CSn, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 16, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI1 имеет положительную полярность в течение второго периода "B" строчной развертки, имеет отрицательную полярность в течение третьего периода "C" строчной развертки, имеет отрицательную полярность в течение четвертого периода "D" строчной развертки и имеет отрицательную полярность в течение пятого периода "E" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1-го по 12-й соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI2 имеет положительную полярность в течение первого периода "1" строчной развертки, имеет положительную полярность в течение второго периода "2" строчной развертки, имеет положительную полярность в течение третьего периода "3" строчной развертки и имеет отрицательную полярность в течение четвертого периода "4" строчной развертки. Каждая из CS-схем 4n принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые две строки. Например, каждая из CS-схем 41 и 42 принимает сигнал CMI1, каждая из CS-схем 43 и 44 принимает сигнал CMI2, а каждая из CS-схем 45 и 46 принимает сигнал CMI1.
CS-схема 4n принимает, через свой контакт CK для сигнала синхронизации, выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+2 из сдвигового регистра в строке номер (n+2). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение (n+2)-го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "C" сигнала CMI1 в течение третьего периода строчной развертки. CS-схема 42 устанавливает положительную полярность "B" сигнала CMI1 в течение второго периода строчной развертки и устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки. CS-схема 43 устанавливает положительную полярность "3" сигнала CMI2 в течение третьего периода строчной развертки и устанавливает отрицательную полярность "5" сигнала CMI2 в течение пятого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "4" сигнала CMI2 в течение четвертого периода строчной развертки и устанавливает положительную полярность "6" сигнала CMI2 в течение шестого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг. 14 и Фиг. 15.
Как было описано в третьем и четвертом примерах, даже согласно жидкокристаллическому устройству 1 отображения, показанному на чертеже Фиг. 10, управление с инверсией двух строк (2H) и управление с инверсией трех строк (3H) могут быть реализованы с использованием двух сигналов CMI1 и CMI2 полярности, которые изменяют свои полярности на обратные одновременно или в соответственные разные привязки по времени. Аналогичным образом, управление с инверсией четырех строк (4H),... и n строк (nH) может быть реализовано путем регулирования тех привязок по времени, в которые сигналы CMI1 и CMI2 изменяют свои полярности на обратные. Это позволяет реализовать управление отображением с увеличением размера в два раза и управление отображением с увеличением размера в три раза. Аналогичным образом, управление отображением с увеличением размера в четыре раза,..., с увеличением размера в n раз может быть реализовано путем регулирования тех привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные.
ПЯТЫЙ ПРИМЕР
В каждом из третьего и четвертого примеров рассмотрена конфигурация, в которой CS-схема 4n в строке номер n принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+2 из сдвигового регистра в строке номер (n+2). Однако следует отметить, что жидкокристаллическое устройство отображения из настоящего изобретения не ограничено этим вариантом. Например, как показано на чертеже Фиг. 17, жидкокристаллическое устройство отображения может быть сконфигурировано так, что CS-схема 4n в строке номер n принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+3 из сдвигового регистра в строке номер (n+3). То есть, CS-схема 41 принимает выходной сигнал SRO1 из сдвигового регистра в соответствующей строке и выходной сигнал SRO4 из сдвигового регистра в четвертой строке. На чертеже Фиг. 18 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве 1 отображения, которое сконфигурировано так, как изложено выше, и выполняет отображение с увеличением размера в два раза. Как показано на чертеже Фиг. 18, во время исходного состояния все CS-сигналы CS1-CS5 имеют один фиксированный электрический потенциал (на чертеже Фиг. 18 - низкий уровень). В первом кадре уровень CS-сигнала CS1 в первой строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G1. Уровень CS-сигнала CS2 во второй строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G2. Уровень CS-сигнала CS3 в третьей строке является низким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G3. Уровень CS-сигнала CS4 в четвертой строке является низким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G4. Уровень CS-сигнала CS5 в пятой строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G5. Сигнал S, подаваемый на исток, представляет собой сигнал, амплитуда которого соответствует уровню серого, представленному видеосигналом, и который инвертирует свою полярность через каждые 2H периодов.
Затем уровни CS-сигналов CS1-CS5 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G5. В частности, в первом кадре уровень CS-сигналов CS1 и CS2 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1 и G2, а уровень CS-сигналов CS3 и CS4 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G3 и G4. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровень CS-сигналов CS1 и CS2 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1 и G2, а уровень CS-сигналов CS3 и CS4 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G3 и G4.
Это обеспечивает реализацию управления с инверсией двух строк (2H) и устраняет возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшает качество отображения.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
Как показано на чертеже Фиг. 17, CS-схема 41 принимает выходные сигналы SRO1 и SRO4 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G1 и G4, сигнал CMI1 полярности и сигнал сброса "RESET". CS-схема 42 принимает выходные сигналы SRO2 и SRO5 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G2 и G5, сигнал CMI1 полярности и сигнал сброса "RESET". CS-схема 43 принимает выходные сигналы SRO3 и SRO6 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G3 и G6, сигнал CMI1 полярности и сигнал сброса "RESET". CS-схема 44 принимает выходные сигналы SRO4 и SRO7 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G4 и G7, сигнал CMI2 полярности и сигнал сброса "RESET". Каждая из CS-схем принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые три строки. То есть, как описано выше, каждая из CS-схем 41, 42 и 43 принимает сигнал CMI1, каждая из CS-схем 44, 45 и 46 принимает сигнал CMI2, а каждая из CS-схем 47, 48 и 49 принимает сигнал CMI1. Сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные при привязках по времени, показанных на чертеже Фиг. 18.
Как показано на чертеже Фиг. 17, CS-схема 41 принимает выходные сигналы SRO1 и SRO4 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G1 и G4, сигнал CMI1 полярности и сигнал сброса "RESET". CS-схема 42 принимает выходные сигналы SRO2 и SRO5 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G2 и G5, сигнал CMI1 полярности и сигнал сброса "RESET". CS-схема 43 принимает выходные сигналы SRO3 и SRO6 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G3 и G6, сигнал CMI1 полярности и сигнал сброса "RESET". CS-схема 44 принимает выходные сигналы SRO4 и SRO7 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G4 и G7, сигнал CMI2 полярности и сигнал сброса "RESET". Каждая из CS-схем принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые три строки. То есть, как описано выше, каждая из CS-схем 41, 42 и 43 принимает сигнал CMI1, каждая из CS-схем 44, 45 и 46 принимает сигнал CMI2 и каждая из CS-схем 47, 48 и 49 принимает сигнал CMI1. Сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные в моменты времени, показанные на чертеже Фиг. 18.
Ниже для удобства описания операции, выполняемые в первом кадре, объяснены, главным образом, на примере CS-схем 42 и 43, которые соответствуют, соответственно, второй и третьей строкам. На чертеже Фиг. 19 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 1 отображения из пятого примера и выводят из нее.
Сначала ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO5 из сдвигового регистра, который был сдвинут в пятую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO5 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 45.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра. Схема 42a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Затем ниже приведено описание изменения форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI1 полярности через свой контакт D для ввода данных и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS3, который схема 43a D-триггера вводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра в третьей строке выводят из схемы SR3 сдвигового регистра и подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через контакт CK для сигнала синхронизации схема 43a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. Затем схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня.
Затем на другой контакт логической схемы 43b "ИЛИ" подают выходной сигнал SRO6 из сдвигового регистра, который был сдвинут в шестую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO4 из сдвигового регистра также подают на один из контактов логической схемы 46b "ИЛИ" в CS-схеме 46.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра. Схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Как было описано выше, согласно пятому примеру, (i) CS-сигнал CS, подаваемый на CS-шину 15 в строке номер n, сгенерирован путем фиксации уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала Gn в строке номер n, и уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+3) в строке номер (n+3), и (ii) CS-сигнал, подаваемый на CS-шину 15 в строке номер (n+1), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+1) в строке номер (n+1), и уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+4) в строке номер (n+4). Кроме того, (iii) CS-сигнал, подаваемый на CS-шину 15 в строке номер (n+2), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+2) в строке номер (n+2), и уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+5) в строке номер (n+5), и (iv) CS-сигнал, подаваемый на CS-шину 15 в строке номер (n+3), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+3) в строке номер (n+3), и уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+6) в строке номер (n+6).
Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в жидкокристаллическом устройстве 1 отображения, в котором используют управление отображением с увеличением размера в два раза. Соответственно, можно устранить неправильные формы сигнала, которые вызывают возникновение поперечных полос. Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигналы CMI1 и CMI2 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 20 показаны соотношения между (i) сигналом CMI1 (или CMI2) полярности и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами CSn, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 20, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI1 имеет положительную полярность в течение второго периода "B" строчной развертки, имеет отрицательную полярность в течение третьего периода "C" строчной развертки, имеет отрицательную полярность в течение четвертого периода "D" строчной развертки и имеет отрицательную полярность в течение пятого периода "E" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1-го по 12-й соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI2 имеет отрицательную полярность в течение первого периода "1" строчной развертки, имеет положительную полярность в течение второго периода "2" строчной развертки, имеет положительную полярность в течение третьего периода "3" строчной развертки и имеет отрицательную полярность во время четвертого периода "4" строчной развертки. Сигналы CMI1 и CMI2 заданы таким образом, что инвертируют свои полярности при привязках по времени, показанных на чертеже Фиг. 20. Каждая из CS-схем 4n принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые три строки. Например, каждая из CS-схем 41, 42 и 43 принимает сигнал CMI1, каждая из CS-схем 44, 45 и 46 принимает сигнал CMI2, а каждая из CS-схем 47, 48 и 49 принимает сигнал CMI1.
CS-схема 4n принимает, через свой контакт CK для сигнала синхронизации, выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+2 из сдвигового регистра в следующей строке номер (n+2). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение (n+2)-го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки. CS-схема 42 устанавливает положительную полярность "B" сигнала CMI1 в течение второго периода строчной развертки и устанавливает отрицательную полярность "E" сигнала CMI1 в течение пятого периода строчной развертки. CS-схема 43 устанавливает отрицательную полярность "C" сигнала CMI1 в течение третьего периода строчной развертки и устанавливает положительную полярность "F" сигнала CMI1 в течение шестого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "4" сигнала CMI2 в течение четвертого периода строчной развертки и устанавливает положительную полярность "7" сигнала CMI2 в течение седьмого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг 18 и Фиг. 19.
ШЕСТОЙ ПРИМЕР
На чертеже Фиг. 21 изображена временная диаграмма, на которой показаны формы различных сигналов, наблюдаемые в том случае, когда в жидкокристаллическом устройстве 1 отображения, показанном на чертеже Фиг. 17, используется управление отображением с увеличением размера в три раза. Согласно Фиг. 21, сигналы CMI1 и CMI2 полярности заданы так, что изменяют свои полярности на обратные через каждые три периода строчной развертки (3H) и имеют одну и ту же стадию. Следовательно, согласно настоящему примеру, может быть использована конфигурация, в которой используется только один из сигналов CMI1 и CMI2 полярности, и его подают в каждую CS-схему.
Как показано на чертеже Фиг. 21, во время исходного состояния все CS-сигналы CS1-CS7 имеют один фиксированный электрический потенциал (на чертеже Фиг. 21 - низкий уровень). В первом кадре уровень CS-сигнала CS1 в первой строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G1. Уровень CS-сигнала CS2 во второй строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G2. Уровень CS-сигнала CS3 в третьей строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G3. В отличие от этого уровень CS-сигнала CS4 в четвертой строке является низким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G4, и уровень CS-сигнала CS5 в пятой строке является низким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G5. Уровень CS-сигнала CS6 в шестой строке является низким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G6. Уровень CS-сигнала CS7 в седьмой строке является высоким в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G7.
Следует отметить, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и который изменяет свою полярность на обратную через каждые три периода строчной развертки. Сигнал S, подаваемый на исток, имеет одинаковый электрический потенциал (уровень серого) в течение трех смежных периодов строчной развертки (3H) и имеет одинаковый электрический потенциал (уровень серого) в течение следующих трех смежных периодов строчной развертки (3H). То есть, каждая из ссылочных позиций с "AA" по "SA", показанных на чертеже Фиг. 21, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, сигнал S, подаваемый на исток в первом кадре, имеет идентичные потенциалы сигнала отрицательной полярности ("AA") в течение первого, второго и третьего периодов строчной развертки, и имеет идентичные потенциалы сигнала положительной полярности ("KA") в течение четвертого, пятого и шестого периодов строчной развертки. Кроме того, сигнал S, подаваемый на исток во втором кадре, имеет идентичные потенциалы сигнала положительной полярности ("II") в течение первого, второго и третьего периодов строчной развертки, и имеет идентичные потенциалы сигнала отрицательной полярности ("KI") в течение четвертого, пятого и шестого периодов строчной развертки ("KI"). Между тем, стробирующие сигналы G1-G7 служат в качестве потенциалов "затвор включен" в течение периодов 1H, соответственно, с первого по седьмой в активном периоде (в эффективном периоде развертки) каждого кадра, и служат в качестве потенциалов "затвор выключен" в течение других периодов.
Затем уровни CS-сигналов CS1-CS7 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G7. В частности, в первом кадре уровень CS-сигналов CS1, CS2 и CS3 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS5 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G4, G5 и G6. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровень CS-сигналов CS1, CS2 и CS3 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G4, G5 и G6.
Таким образом, в жидкокристаллическом устройстве 1 отображения, в котором используется управление отображением с увеличением размера в три раза, электрический потенциал каждого CS-сигнала в тот момент времени, когда понижается уровень стробирующего сигнала, изменяется через три строки в соответствии с полярностью сигнала S, подаваемого на исток; следовательно, в первом кадре все электрические потенциалы Vpix1-Vpix7 электродов 14 пикселей надлежащим образом смещены CS-сигналами, соответственно, CS1-CS7. Следовательно, ввод сигналов S, подаваемых на исток, с одинаковым уровнем серого вызывает то, что положительные и отрицательные разности электрического потенциала между электрическим потенциалом противоэлектрода и смещенным электрическим потенциалом каждого из электродов 14 пикселей являются равными друг другу. То есть, в первом кадре, в котором в пиксели, соответствующие трем смежным строкам в одном и том же столбце пикселей, записывают сигнал, подаваемый на исток, который имеет отрицательную полярность и тот же самый электрический потенциал (уровень серого), а в пиксели, соответствующие трем смежным строкам рядом с этими тремя строками в том же самом столбце пикселей, записывают сигнал, подаваемый на исток, который имеет положительную полярность и тот же самый электрический потенциал (уровень серого), электрические потенциалы CS-сигналов, соответствующих первым трем строкам, не инвертируют по полярности во время записи в пиксели, соответствующие первым трем строкам, инвертируют по полярности в отрицательном направлении после записи и не инвертируют по полярности до следующей записи, а электрические потенциалы CS-сигналов, соответствующих следующим трем строкам, не инвертируют по полярности во время записи в пиксели, соответствующие следующим трем строкам, инвертируют по полярности в положительном направлении после записи и не инвертируют по полярности до следующей записи. Это обеспечивает реализацию управления с инверсией трех строк при ЗС-управлении.
Кроме того, вышеописанная конфигурация позволяет обеспечить надлежащее смещение электрических потенциалов Vpix1-Vpix7 электродов 14 пикселей CS-сигналами, соответственно, CS1-CS7 даже в случае управления отображением с увеличением размера в три раза (управления с инверсией трех строк). Это позволяет обеспечить одинаковый друг с другом электрический потенциал на электродах 14 пикселей, на которые подают одинаковый потенциал сигнала, что позволяет устранить возникновение поперечных полос, показанных на чертеже Фиг. 64.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
Согласно схеме 30 управления шинами затворов и схеме 40 управления CS-шинами шестого примера, сигналы CMI1 и CMI2 полярности инвертируют свои полярности при иных привязках по времени, чем в пятом примере. Другие конфигурации являются такими же, как и конфигурация, показанная на чертеже Фиг. 17. Каждая CS-схема принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+3 из сдвигового регистра в строке номер (n+3), и принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые три строки. То есть, как описано выше, каждая из CS-схем 41, 42 и 43 принимает сигнал CMI1, каждая из CS-схем 44, 45 и 46 принимает сигнал CMI2, а каждая из CS-схем 47, 48 и 49 принимает сигнал CMI1. Сигналы CMI1 и CMI2 полярности заданы так, как показано на чертеже Фиг. 21.
В приведенном ниже описании, со ссылкой на чертежи Фиг. 21 и Фиг. 22, рассмотрено жидкокристаллическое устройство 1 отображения, в котором используется управление отображением с увеличением размера в три раза. В приведенном ниже описании опущены описания соединений в схеме 30 управления шинами затворов и в схеме 40 управления CS-шинами. На чертеже Фиг. 22 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 1 отображения из шестого примера и выводят из нее. Ниже для удобства описания операции, выполняемые в первом кадре, объяснены, главным образом, на примере CS-схем 42, 43 и 44, которые соответствуют, соответственно, второй, третьей и четвертой строкам.
Сначала ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO5 из сдвигового регистра, который был сдвинут в пятую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO5 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 45.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра. Схема 42a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Затем, ниже приведено описание изменений форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS3, который схема 43a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра, соответствующий стробирующему сигналу G3, который должен быть подан на шину 12 затворов в третьей строке, выводят из схемы SR3 сдвигового регистра и подают на один из контактов контакту логической схемы 43b "ИЛИ" в CS-схеме 43. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Затем схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня.
Затем выходной сигнал SRO6 из сдвигового регистра, который был сдвинут в шестую строку в схеме 30 управления шинами затворов, подают на другой контакт логической схемы 43b "ИЛИ". Выходной сигнал SRO6 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 46.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации, и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра. Схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Затем, ниже приведено описание изменений форм различных сигналов в четвертой строке. Во время исходного состояния схема 44a D-триггера в CS-схеме 44 принимает сигнал CMI2 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS4, который схема 44a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO4 из сдвигового регистра в четвертой строке выводят из схемы SR4 сдвигового регистра и подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 44a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. Схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня.
Затем на другой контакт логической схемы 44b "ИЛИ" подают выходной сигнал SRO7 из сдвигового регистра, который был сдвинут в седьмую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO7 из сдвигового регистра также подают на один из контактов логической схемы 47b "ИЛИ" в CS-схеме 47.
Схема 44a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO7 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации, и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO7 из сдвигового регистра. Схема 44a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO7 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO7 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 44a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня во втором кадре.
Описанные выше операции (i) в строках с первой по третью вызывают понижение электрических потенциалов CS-сигналов после понижения уровней стробирующих сигналов в этих строках в те моменты времени, когда стробирующие сигналы в соответствующих им строках понижаются (то есть, в те моменты времени, когда тонкопленочные транзисторы (TFT) 13 переключаются из состояния "включено" в состояние "выключено"), и (ii) в строках с четвертой по шестую вызывают повышение электрических потенциалов CS-сигналов после понижения уровней стробирующих сигналов в этих строках в те моменты времени, когда стробирующие сигналы в соответствующих им строках понижаются (то есть, в те моменты времени, когда тонкопленочные транзисторы (TFT) 13 переключаются из состояния "включено" в состояние "выключено") (см. чертежи Фиг. 21 и Фиг. 22).
Как было описано выше, согласно шестому примеру, управление с инверсией трех строк (3H) может быть реализовано путем регулирования в жидкокристаллическом устройстве 1 отображения, сконфигурированном так, как показано на чертеже Фиг. 17, тех привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные. Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в жидкокристаллическом устройстве 1 отображения, в котором используют управление отображением с увеличением размера в три раза. Соответственно, можно устранить неправильные формы сигнала, которые вызывают возникновение поперечных полос. Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигналы CMI1 и CMI2 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 23 показаны соотношения между (i) сигналом CMI1 (или CMI2) полярности и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами CSn, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 23, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI1 имеет положительную полярность в течение второго периода "B" строчной развертки, имеет положительную полярность в течение третьего периода "C" строчной развертки, имеет отрицательную полярность в течение четвертого периода "D" строчной развертки и имеет отрицательную полярность в течение пятого периода "E" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1-го по 12-й соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI2 имеет положительную полярность в течение первого периода "1" строчной развертки, имеет положительную полярность в течение второго периода "2" строчной развертки, имеет положительную полярность в течение третьего периода "3" строчной развертки и имеет отрицательную полярность в течение четвертого периода "4" строчной развертки. Кроме того, каждая из CS-схем 4n принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые три строки. Например, каждая из CS-схем 41, 42 и 43 принимает сигнал CMI1, каждая из CS-схем 44, 45 и 46 принимает сигнал CMI2 и каждая из CS-схем 47, 48 и 49 принимает сигнал CMI1.
CS-схема 4n принимает, через свой контакт CK для сигнала синхронизации, выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+3 из сдвигового регистра в строке номер (n+3). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение (n+3)-го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки. CS-схема 42 устанавливает положительную полярность "B" сигнала CMI1 в течение второго периода строчной развертки и устанавливает отрицательную полярность "E" сигнала CMI1 в течение пятого периода строчной развертки. CS-схема 43 устанавливает положительную полярность "C" сигнала CMI1 в течение третьего периода строчной развертки и устанавливает отрицательную полярность "F" сигнала CMI1 в течение шестого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "4" сигнала CMI2 в течение четвертого периода строчной развертки и устанавливает положительную полярность "7" сигнала CMI2 в течение седьмого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг. 21 и Фиг. 22.
Как было описано в пятом и шестом примерах, даже согласно жидкокристаллическому устройству 1 отображения, показанному на чертеже Фиг. 17, управление с инверсией двух строк (2H) и управление с инверсией трех строк (3H) может быть реализовано с использованием двух сигналов CMI1 и CMI2 полярности, которые изменяют свои полярности на обратные одновременно или в соответственные разные привязки по времени. Аналогичным образом, управление с инверсией четырех строк (4H),... и n строк (nH) может быть реализовано путем регулирования тех привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные. Это позволяет реализовать управление отображением с увеличением размера в два раза и управление отображением с увеличением размера в три раза. Аналогичным образом, управление отображением с увеличением размера в четыре раза,..., с увеличением размера в n раз может быть реализовано путем регулирования тех привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные.
ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже приведено описание другого варианта осуществления настоящего изобретения со ссылкой на чертежи Фиг. 25-Фиг. 27. Следует отметить следующее: для удобства элементам, имеющим функции, идентичные функциям соответствующих элементов, описанных в первом варианте осуществления изобретения, присвоены соответствующие идентичные номера позиций, и их описания здесь опущены. Также следует отметить, что термины, определенные в первом варианте осуществления изобретения, использованы в данных примерах также согласно этим определениям, если не указано иное.
Схемная компоновка жидкокристаллического устройства 2 отображения согласно данному варианту осуществления изобретения является идентичной схемной компоновке жидкокристаллического устройства 1 отображения из первого варианта осуществления изобретения, которое показано на чертежах Фиг. 1 и Фиг. 2. Соответственно, описание схемной компоновки жидкокристаллического устройства 2 отображения здесь опущено. В частности, в приведенном ниже описании рассмотрена схема 30 управления шинами затворов и схема 40 управления CS-шинами. В данном жидкокристаллическом устройстве 2 отображения предусмотрено наличие одной сигнальной шины для схемы 40 управления CS-шинами для приема сигнала CMI полярности из управляющей схемы 50 (см. Фиг. 1). Эта конфигурация обеспечивает реализацию управления с инверсией n-строк (nH) для использования управления отображением с увеличением размера в n раз путем регулирования частоты инверсии полярности сигнала CMI полярности. В случае управления с инверсией двух строк (2H) эта конфигурация может быть реализована за счет того, что в конфигурации, показанной на чертежах Фиг. 10 и Фиг. 11, сигналом CMI полярности является один из сигналов CMI1 или CMI2, и за счет задания привязки по времени инверсии полярности через каждые две строки. Кроме того, в случае управления с инверсией трех строк (3H) эта конфигурация может быть реализована за счет того, что при управлении, показанном на чертежах Фиг. 17 и Фиг. 21, сигналом CMI полярности является один из сигналов CMI1 или CMI2, и за счет задания привязки по времени инверсии полярности через каждые три строки.
По существу, управление с инверсией n строк (nH) с однофазным сигналом CMI полярности может быть реализовано путем ввода логической суммы (выходного сигнала из логической схемы "ИЛИ") (i) выходного сигнала SROm из сдвигового регистра в текущем каскаде (каскаде номер m) и (ii) выходного сигнала SROm+n из сдвигового регистра в каскаде номер (m+n) в схему CSLm триггера в каскаде номер m через ее контакт CK для сигнала синхронизации и путем задания привязки по времени инверсии полярности сигнала CMI полярности, подлежащего вводу через контакт D для ввода данных, в качестве периода n строчной развертки (nH). Ниже в качестве типичного примера приведено описание конфигурации для реализации управления с инверсией четырех строк (4H) для применения управления отображением с увеличением размера в четыре раза.
СЕДЬМОЙ ПРИМЕР
На чертеже Фиг. 24 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве 2 отображения, в котором используется управление с инверсией четырех строк (4H). На чертеже Фиг. 24 GSP представляет собой импульс включения затвора, который задает привязку по времени кадровой развертки, а GCK1 (CK) и GCK2 (CKB) представляют собой стробирующие тактовые импульсы, которые выводят из управляющей схемы 50 для задания привязки по времени работы сдвигового регистра. Промежуток времени от заднего фронта до следующего заднего фронта GSP соответствует одному периоду кадровой развертки (периоду 1V). Каждый из следующих промежутков времени: промежуток времени от переднего фронта GCK1 до переднего фронта GCK2 и промежуток времени от переднего фронта GCK2 до переднего фронта GCK1, соответствует одному периоду строчной развертки (периоду 1H). Сигнал CMI полярности изменяет свою полярность на обратную через каждые четыре периода строчной развертки (4H).
Кроме того, на чертеже Фиг. 24 показаны следующие сигналы в указанном порядке следования: сигнал S, подаваемый на исток, (видеосигнал), который подают из схемы 20 управления шинами истоков на шину 11 истоков (на шину 11 истоков, имеющуюся в столбце номер x); стробирующий сигнал G1, который подают из схемы 30 управления шинами затворов на шину 12 затворов, имеющуюся в первой строке; CS-сигнал CS1, который подают из схемы 40 управления CS-шинами на CS-шину 15, имеющуюся в первой строке; и форма сигнала электрического потенциала Vpix1 электрода 14 пикселя, имеющегося в первой строке и в столбце номер x. На чертеже Фиг. 24 показаны следующие сигналы в указанном порядке следования: стробирующий сигнал G2, который подают на шину 12 затворов, имеющуюся во второй строке; CS-сигнал CS2, который подан на CS-шину 15, имеющуюся во второй строке; и форма сигнала электрического потенциала Vpix2 электрода 14 пикселя, имеющегося во второй строке и в столбце номер x. То же самое применимо и к строкам с третью по девятую.
Следует отметить, что пунктирные линии на электрических потенциалах Vpix1-Vpix9 указывают электрический потенциал противоэлектрода 19.
Ниже предполагают, что начальным кадром изображения, выводимого на экран устройства отображения, является первый кадр и что первому кадру предшествует исходное состояние. Как показано на чертеже Фиг. 24, во время исходного состояния все CS-сигналы CS1-CS9 имеют один фиксированный электрический потенциал (на чертеже Фиг. 24 - низкий уровень). В первом кадре уровни CS-сигналов CS1-CS4 в соответствующих строках с первой по четвертую являются высокими в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов с G1 (который соответствует выходному сигналу SRO1 из соответствующей схемы SR1 сдвигового регистра) по G4 (который соответствует выходному сигналу SRO4 из соответствующей схемы SR1 сдвигового регистра). Уровни CS-сигналов CS5-CS8 в соответствующих строках с пятой по восьмую являются низкими в тот момент времени, когда понижается уровень соответствующих стробирующих сигналов G5-G8. Уровень CS-сигнала CS9 в девятой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G9.
Следует отметить, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и который изменяет свою полярность на обратную через каждые четыре периода строчной развертки (4H). Сигнал S, подаваемый на исток, имеет одинаковый электрический потенциал (уровень серого) в течение двух смежных периодов строчной развертки (2H) и имеет одинаковый электрический потенциал (уровень серого) в течение следующих двух смежных периодов строчной развертки (2H). То есть, каждая из ссылочных позиций с "AA" по "SA", показанных на чертеже Фиг. 24, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, сигнал S, подаваемый на исток в первом кадре, имеет идентичные полярности сигнала отрицательной полярности ("AA") в течение периодов строчной развертки с первого по четвертый и имеет идентичные полярности сигнала положительной полярности ("KA") в течение периодов строчной развертки с пятого по восьмой. Кроме того, сигнал S, подаваемый на исток во втором кадре, имеет идентичные потенциалы сигнала положительной полярности ("II") в течение периодов строчной развертки с первого по четвертый и имеет идентичные потенциалы сигнала отрицательной полярности ("KI") в течение периодов строчной развертки с пятого по восьмой. Между тем, стробирующие сигналы G1-G9 служат в качестве потенциалов "затвор включен" в течение периодов 1H, соответственно, с первого по девятый в активном периоде (в эффективном периоде развертки) каждого кадра и служат в качестве потенциалов "затвор выключен" в течение других периодов.
Затем уровни CS-сигналов CS1-CS9 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G9. В частности, в первом кадре уровень CS-сигналов CS1-CS4 понижается после понижения уровня соответствующих им стробирующих сигналов G1-G4, уровень CS-сигналов CS5-CS8 повышается после понижения уровня соответствующих им стробирующих сигналов G5-G8, а уровень CS-сигнала CS9 понижается после понижения уровня соответствующего ему стробирующего сигнала G9. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровень CS-сигналов CS1-CS4 повышается после понижения уровня соответствующих им стробирующих сигналов G1-G4, уровень CS-сигналов CS5-CS8 понижается после понижения уровня соответствующих им стробирующих сигналов G5-G8, а уровень CS-сигнала CS9 повышается после понижения уровня соответствующего ему стробирующего сигнала G9.
Таким образом, в жидкокристаллическом устройстве 2 отображения, в котором используется управление отображением с увеличением размера в четыре раза, электрический потенциал каждого CS-сигнала тот момент времени, когда понижается уровень стробирующего сигнала, изменяется через каждые четыре строки в соответствии с полярностью сигнала S, подаваемого на исток. Следовательно, в первом кадре все электрические потенциалы Vpix1-Vpix9 электродов 14 пикселей надлежащим образом смещены CS-сигналами, соответственно, CS1-CS9. Следовательно, ввод сигналов S, подаваемых на исток, с одинаковым уровнем серого вызывает то, что положительные и отрицательные разности электрического потенциала между электрическим потенциалом противоэлектрода и смещенным электрическим потенциалом каждого из электродов 14 пикселей являются равными друг другу. То есть, в первом кадре, в котором в пиксели, соответствующие четырем смежным строкам в одном и том же столбце пикселей, записывают сигнал, подаваемый на исток, который имеет отрицательную полярность и тот же самый электрический потенциал, а в пиксели, соответствующие четырем смежным пикселям рядом с этими четырьмя строками в том же самом столбце пикселей, записывают сигнал, подаваемый на исток, который имеет положительную полярность и тот же самый электрический потенциал, электрические потенциалы CS-сигналов CS1-CS4, соответствующих первым четырем строкам, не инвертируют по полярности во время записи в пиксели, соответствующие первым четырем строкам, инвертируют по полярности в отрицательном направлении после записи и не инвертируют по полярности до следующей записи, а электрические потенциалы CS-сигналов SC5-CS8, соответствующих следующим четырем строкам, не инвертируют по полярности во время записи в пиксели, соответствующие следующим четырем строкам, инвертируют по полярности в положительном направлении после записи и не инвертируют по полярности до следующей записи. Это обеспечивает реализацию управления отображением с увеличением размера в четыре раза при ЗС-управлении. Кроме того, эта конфигурация позволяет обеспечивать надлежащее смещение электрических потенциалов Vpix1-Vpix9 электродов 14 пикселей CS-сигналами, соответственно, CS1-CS9. Это позволяет устранить возникновение альтернативных темных и ярких поперечных полос в изображении, выводимом на экран устройства отображения.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
На чертеже Фиг. 25 показана конфигурация схемы 30 управления шинами затворов и схема 40 управления CS-шинами. Схема 40 управления CS-шинами включает в себя множество CS-схем 41, 42, 43,..., которые соответствуют соответствующим строкам. CS-схемы 41, 42, 43,... включают в себя соответствующие схемы 41a, 42a, 43a,... D-защелок и соответствующие логические схемы 41b, 42b, 43b,... "ИЛИ". Схема 30 управления шинами затворов включает в себя множество схем SR1, SR2, SR3,... сдвиговых регистров. Здесь следует отметить следующее: несмотря на то что на чертеже Фиг. 25 схема 30 управления шинами затворов и схема 40 управления CS-шинами расположены на одной стороне жидкокристаллической панели отображения, это не является ограничивающим признаком. Схема 30 управления шинами затворов и схема 40 управления CS-шинами могут быть расположены на соответствующих различных сторонах жидкокристаллической панели отображения.
Входными сигналами, которые подают в CS-схему 41, являются выходные сигналы SRO1 и SRO5 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G1 и G5, сигнал CMI полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 42, являются выходные сигналы SRO2 и SRO6 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G2 и G6, сигнал CMI полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 43, являются выходные сигналы SRO3 и SRO7 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G3 и G7, сигнал CMI полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 44, являются выходные сигналы SRO4 и SRO8 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G4 и G8, сигнал CMI полярности и сигнал сброса "RESET". Как описано выше, каждая CS-схема принимает выходной сигнал SROm из сдвигового регистра в соответствующей строке номер m и выходной сигнал из SROm+4 сдвигового регистра в строке номер (m+4) и принимает сигнал CMI полярности. Сигнал CMI полярности изменяет свою полярность на обратную через каждые четыре периода строчной развертки (см. Фиг. 24). Сигнал CMI полярности и сигнал сброса "RESET" подают из управляющей схемы 50.
Ниже для удобства описания в качестве примера взяты, главным образом, CS-схемы 44 и 45, которые соответствуют соответственно четвертой и пятой строкам.
Схема 44a D-триггера принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса, принимает сигнал CMI полярности через свой контакт D для ввода данных и принимает выходной сигнал из логической схемы 44b "ИЛИ" через свой контакт CK для сигнала синхронизации. В соответствии с изменением (с низкого уровня на высокий уровень или с высокого уровня на низкий уровень) уровня электрического потенциала сигнала, который схема 44a D-триггера принимает через свой контакт CK для сигнала синхронизации, схема 44a D-триггера выводит в качестве CS-сигнала сигнал CS4, указывающий изменение уровня электрического потенциала, состояние ввода (низкий уровень или высокий уровень) сигнала CMI полярности, который она принимает через свой контакт D для ввода данных.
В частности, когда уровень электрического потенциала сигнала, который схема 44a D-триггера принимает через свой контакт CK для сигнала синхронизации, является высоким, схема 44a D-триггера выводит состояние ввода (низкий уровень или высокий уровень) сигнала CMI полярности, принятого ею через ее контакт D для ввода данных. Когда уровень электрического потенциала сигнала, который схема 44a D-триггера принимает через свой контакт CK для сигнала синхронизации, изменяется с высокого уровня на низкий уровень, то схема 44a D-триггера фиксирует состояние ввода (низкий уровень или высокий уровень) сигнала CMI полярности, принятого ею через ее контакт D в момент изменения, и сохраняет зафиксированное состояние до следующего раза, когда уровень электрического потенциала сигнала, который триггерная схема 44a принимает через свой контакт CK для сигнала синхронизации, повышается до высокого уровня. Затем схема 44a D-триггера выводит через свой выходной контакт Q CS-сигнал CS4, который указывает изменение уровня электрического потенциала.
Аналогичным образом схема 45a D-триггера принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса и принимает сигнал CMI полярности через свой контакт D для ввода данных. Между тем схема 45a D-триггера принимает через свой контакт CK для сигнала синхронизации выходной сигнал из логической схемы 45b "ИЛИ". Это вызывает то, что схема 45a D-триггера выводит через свой выходной контакт Q CS-сигнал CS5, указывающий изменение уровня электрического потенциала.
Логическая схема 44b "ИЛИ" принимает выходной сигнал SRO4 из схемы SR4 сдвигового регистра в соответствующей ей четвертой строке и выходной сигнал SRO8 из схемы SR8 сдвигового регистра в восьмой строке и, таким образом, выводит сигнал M4, показанный на чертеже Фиг. 26. Кроме того, логическая схема 45b "ИЛИ" принимает выходной сигнал SRO5 из схемы SR5 сдвигового регистра в соответствующей ей строке и выходной сигнал SRO9 из схемы SR9 сдвигового регистра в девятой строке и, таким образом, выводит сигнал M5, показанный на чертеже Фиг. 26.
Выходной сигнал SRO из сдвигового регистра, который подают в каждую логическую схему "ИЛИ", сгенерирован известным способом в схеме 30 управления шинами затворов (см. Фиг. 24), которая включает в себя схемы D-триггеров. Схема 30 управления шинами затворов последовательно сдвигает импульс GSP включения затвора, который подают из управляющей схемы 50 в схему SR сдвигового регистра в следующем каскаде при привязке по времени, когда стробирующий тактовый импульс GCK имеет частоту, соответствующую одному периоду строчной развертки.
На чертеже Фиг. 26 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 2 отображения из седьмого примера и выводят из нее.
Сначала ниже приведено описание изменений форм различных сигналов в четвертой строке. Во время исходного состояния схема 44a D-триггера в CS-схеме 44 принимает сигнал CMI полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS4, который схема 44a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO4 из сдвигового регистра, соответствующий стробирующему сигналу G4, который должен быть подан на шину 12 затворов в четвертой строке, выводят из схемы SR4 сдвигового регистра и подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 44a D-триггера передает состояние ввода сигнала CMI полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра. Схема 44a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 44a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня.
Затем на другой контакт логической схемы 44b "ИЛИ" подают выходной сигнал SRO8 из сдвигового регистра, который был сдвинут в восьмую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO8 из сдвигового регистра также подают на один из контактов логической схемы 48b "ИЛИ" в CS-схеме 48.
Схема 44a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO8 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO8 из сдвигового регистра. Схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO8 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO8 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня во втором кадре.
Следует отметить, что строки с первой по третью имеют формы сигналов, идентичные формам сигналов в четвертой строке, как показано на чертеже Фиг. 26.
Затем ниже приведено описание изменений форм различных сигналов в пятой строке. Во время исходного состояния схема 45a D-триггера в CS-схеме 45 принимает сигнал CMI полярности через свой контакт D для ввода данных и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS5, который схема 45a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO5 из сдвигового регистра, соответствующий стробирующему сигналу G5, который должен быть подан на шину 12 затворов в пятой строке, выводят из схемы SR5 сдвигового регистра и подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 45. Затем схема 45a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M5 через свой контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M5 через свой контакт CK для сигнала синхронизации схема 45a D-триггера передает состояние ввода сигнала CMI полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. Затем схема 45a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M5, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M5 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M5 через свой контакт CK для сигнала синхронизации схема 45a D-триггера фиксирует состояние ввода сигнала CMI полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 45a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M5 не повысится до высокого уровня.
Затем на другой контакт логической схемы 45b "ИЛИ" подают выходной сигнал SRO9 из сдвигового регистра, который был сдвинут в девятую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO9 из сдвигового регистра также подают на один из контактов логической схемы 49b "ИЛИ" в CS-схеме 49.
Схема 45a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO9 из сдвигового регистра в сигнале M5 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS5 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO9 из сдвигового регистра. Схема 45a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO9 из сдвигового регистра в сигнале M5, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M5 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO9 из сдвигового регистра в сигнале M5 через свой контакт CK для сигнала синхронизации схема 45a D-триггера фиксирует состояние ввода сигнала CMI полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 45a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M5 не повысится до высокого уровня во втором кадре.
Как показано на чертеже Фиг. 26, формы сигналов в строках с шестой по восьмую являются идентичными формам сигналов в пятой строке. Кроме того, как показано на чертеже Фиг. 24, во втором кадре полярность сигнала CMI полярности изменяется на обратную, следовательно, в первом кадре формы сигналов в строках с первой по четвертую строкам являются идентичными формам сигнала в строках с пятой по восьмую соответственно, и в первом кадре формы сигналов в строках с пятой по восьмую являются идентичными формам сигналов в строках с первой по четвертую соответственно. Что касается третьего и последующих кадров, то операции выполнены для каждой строки так, чтобы попеременно повторялись формы сигналов их первого кадра и второго кадра.
Как описано выше, каждая из CS-схем 41, 42, 43,... и 4n, соответствующая надлежащим строкам, позволяет в каждом кадре при управлении с инверсией четырех строк (4H) переключать электрический потенциал CS-сигнала в тот момент времени, когда уровень стробирующего сигнала в соответствующей строке понижается (в момент времени, когда TFT13 переключается из состояния "включен" в состояние "выключен") с высокого уровня до низкого уровня после понижения уровня стробирующего сигнала в этой строке.
То есть, в седьмом примере (i) CS-сигнал CSm, подаваемый на CS-шину 15 в строке номер m, сгенерирован путем фиксации уровня электрического потенциала сигнала CMI полярности в тот момент времени, когда повышается уровень стробирующего сигнала Gm в строке номер m, и уровня электрического потенциала сигнала CMI полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(m+4) в строке номер (m+4), и (ii) CS-сигнал CSm+1, подаваемый на CS-шину 15 в строке номер (m+1), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(m+1) в строке номер (m+1), и уровня электрического потенциала сигнала CMI полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(m+5) в строке номер(m+5).
Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в жидкокристаллическом устройстве 2 отображения, в котором используют управление отображением с увеличением размера в четыре раза. Соответственно, можно устранить неправильные формы сигнала, которые вызывают возникновение поперечных полос. Это позволяет предотвратить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигнал CMI полярности, подаваемый в CS-схемы 4n, связан с выходными сигналами SRO из сдвиговых регистров. На чертеже Фиг. 27 показаны соотношения между (i) сигналом CMI полярности и выходными сигналами SRO из сдвиговых регистров, которые вводят в CS-схемы, и (ii) CS-сигналами, которые выводят из CS-схем.
Что касается сигнала CMI, показанного на чертеже Фиг. 27, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность (положительную полярность или отрицательную полярность) в течение этого периода строчной развертки. Например, сигнал CMI имеет положительную полярность в течение второго периода "B" строчной развертки, имеет положительную полярность в течение третьего периода "C" строчной развертки, имеет положительную полярность в течение четвертого периода "D" строчной развертки и имеет отрицательную полярность в течение пятого периода "E" строчной развертки. Таким образом, CMI изменяет свою полярность на обратную через каждые четыре периода строчной развертки.
CS-схема принимает через свой контакт CK для сигнала синхронизации выходной сигнал SROm из сдвигового регистра в строке номер m и выходной сигнал SROm+4 из сдвигового регистра в строке номер (m+4). Это вызывает то, что CS-схема фиксирует (i) сигнал CMI, который CS-схема принимает через свой контакт D для ввода данных в течение m-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема принимает через свой контакт D для ввода данных в течение (m+4)-го периода строчной развертки. Например, CS-схема 41, соответствующая первой строке, устанавливает положительную полярность "A" сигнала CMI в течение первого периода строчной развертки и устанавливает отрицательную полярность "E" сигнала CMI в течение пятого периода строчной развертки. CS-схема 42, соответствующая второй строке, устанавливает положительную полярность "B" сигнала CMI в течение второго периода строчной развертки и устанавливает отрицательную полярность "F" сигнала CMI в течение шестого периода строчной развертки. CS-схема 43, соответствующая третьей строке, устанавливает положительную полярность "C" сигнала CMI в течение третьего периода строчной развертки и устанавливает отрицательную полярность "G" сигнала CMI в течение седьмого периода строчной развертки. CS-схема 44, соответствующая четвертой строке, устанавливает положительную полярность "D" сигнала CMI в течение четвертого периода строчной развертки и устанавливает отрицательную полярность "H" сигнала CMI в течение восьмого периода строчной развертки. CS-схема 45, соответствующая пятой строке, устанавливает отрицательную полярность "E" сигнала CMI в течение пятого периода строчной развертки и устанавливает положительную полярность "I" сигнала CMI в течение девятого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CS, показанные на чертежах Фиг. 24 и Фиг. 26.
ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже приведено описание еще одного варианта осуществления настоящего изобретения со ссылкой на чертежи Фиг. 28-43. Следует отметить следующее: для удобства элементам, имеющим функции, идентичные функциям соответствующих элементов, описанных в первом варианте осуществления изобретения, присвоены соответствующие идентичные номера позиций, и их описания здесь опущены. Также следует отметить, что термины, определенные в первом варианте осуществления изобретения, использованы в данных примерах также согласно этим определениям, если не указано иное.
Схемная компоновка жидкокристаллического устройства 3 отображения согласно данному варианту осуществления изобретения является идентичной схемной компоновке жидкокристаллического устройства 1 отображения из первого варианта осуществления изобретения, показанного на чертежах Фиг. 1 и Фиг. 2. Соответственно, описание схемной компоновки жидкокристаллического устройства 3 отображения здесь опущено. В частности, в приведенном ниже описании рассмотрена схема 30 управления шинами затворов и схема 40 управления CS-шинами. Аналогично первому варианту осуществления изобретения, в данном жидкокристаллическом устройстве 3 отображения предусмотрено наличие двух сигнальных шин для подачи сигналов CMI полярности из управляющей схемы 50 (см. Фиг. 1) в схему 40 управления CS-шинами. Сигналы CMI1 и CMI2 полярности, которые подают по соответствующим сигнальным шинам, имеют формы сигнала, полярности которых являются обратными друг другу. Для реализации управления с инверсией n-строк (nH) для осуществления управления отображением с увеличением размера в n раз при такой компоновке привязки по времени инверсии полярности сигналов CMI1 и CMI2 полярности являются отрегулированными и заданы сигналы CMI1 и CMI2 полярности, которые должны принимать схемы CSL триггеров соответствующих строк. Описание конкретных примеров приведено ниже.
ВОСЬМОЙ ПРИМЕР
На чертеже Фиг. 28 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве 3 отображения, в котором используется управление с инверсией двух строк (2H). На чертеже Фиг. 28 сигналы CMI1 и CMI2 полярности заданы таким образом, что сигналы CMI1 и CMI2 полярности инвертируют свои полярности через каждый период строчной развертки (1H), и сигналы CMI1 и CMI2 полярности являются обратными друг другу по их полярности.
Как показано на чертеже Фиг. 28, во время исходного состояния все CS-сигналы CS1-CS5 имеют один фиксированный электрический потенциал (на чертеже Фиг. 28 - низкий уровень). В первом кадре уровень CS-сигнала CS1 в первой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G1 (который соответствует выходному сигналу SRO1 из соответствующей схемы SR1 сдвигового регистра). Уровень CS-сигнала CS2 во второй строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G2. Уровень CS-сигнала CS3 в третьей строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G3. Уровень CS-сигнала CS4 в четвертой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G4. Уровень CS-сигнала CS5 в пятой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G5.
Здесь следует отметить, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и который изменяет свою полярность на обратную через каждые два периода строчной развертки (2H). Сигнал S, подаваемый на исток, имеет одинаковый электрический потенциал (уровень серого) в течение двух смежных периодов строчной развертки (2H) и имеет одинаковый электрический потенциал (уровень серого) в течение следующих двух смежных периодов строчной развертки (2H). То есть, каждая из ссылочных позиций с "AA" по "SA", показанных на чертеже Фиг. 28, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, сигнал S, подаваемый на исток в первом кадре, имеет идентичные потенциалы сигнала отрицательной полярности ("AA") в течение первого и второго периодов строчной развертки и имеет идентичные потенциалы сигнала положительной полярности ("KA") в течение третьего и четвертого периодов строчной развертки. Кроме того, сигнал S, подаваемый на исток во втором кадре, имеет идентичные потенциалы сигнала положительной полярности ("II") в течение первого и второго периодов строчной развертки и имеет идентичные потенциалы сигнала отрицательной полярности ("KI") в течение третьего и четвертого периодов строчной развертки. Кроме того, поскольку на чертеже Фиг. 28 сделано предположение, что отображают однородное изображение, то амплитуда сигнала S, подаваемого на исток, является постоянной. Между тем, стробирующие сигналы G1-G5 служат в качестве потенциалов "затвор включен" в течение периодов 1H соответственно с первого по пятый в активном периоде (в эффективном периоде развертки) каждого кадра и служат в качестве потенциалов "затвор выключен" в течение других периодов.
Затем уровни CS-сигналов CS1-CS5 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G5. В частности, в первом кадре уровень CS-сигналов CS1 и CS2 понижается после понижения уровня соответствующих им стробирующих сигналов соответственно G1 и G2, а уровень CS-сигналов CS3 и CS4 повышается после понижения уровня соответствующих им стробирующих сигналов соответственно G3 и G4. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровень CS-сигналов CS1 и CS2 повышается после понижения уровня соответствующих им стробирующих сигналов соответственно G1 и G2, а уровень CS-сигналов CS3 и CS4 понижается после понижения уровня соответствующих им стробирующих сигналов соответственно G3 и G4.
Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и позволяет улучшить качество отображения.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
На чертеже Фиг. 29 показана конфигурация схемы 30 управления шинами затворов и схемы 40 управления CS-шинами. Схема 40 управления CS-шинами включает в себя множество CS-схем 41, 42, 43,... и 4n, которые соответствуют соответствующим строкам. CS-схемы 41, 42, 43,... и 4n включают в себя соответствующие схемы 41a, 42a, 43a,... и 4na D-триггеров; и соответствующие логические схемы 41b, 42b, 43b,... и 4nb "ИЛИ". Схема 30 управления шинами затворов включает в себя множество схем SR1, SR2, SR3,... и SRn сдвиговых регистров. Здесь следует отметить следующее: несмотря на то что на чертеже Фиг. 29 схема 30 управления шинами затворов и схема 40 управления CS-шинами расположены на одной стороне жидкокристаллической панели отображения, это не является ограничивающим признаком. Схема 30 управления шинами затворов и схема 40 управления CS-шинами могут быть расположены на соответствующих различных сторонах жидкокристаллической панели отображения.
Входными сигналами, которые подают в CS-схему 41, являются выходные сигналы SRO1 и SRO2 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G1 и G2, сигнал CMI1 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 42, являются выходные сигналы SRO2 и SRO3 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G2 и G3, сигнал CMI2 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 43, являются выходные сигналы SRO3 и SRO4 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G3 и G4, сигнал CMI2 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 44, являются выходные сигналы SRO4 и SRO5 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G4 и G5, сигнал CMI1 полярности и сигнал сброса "RESET". Как описано выше, каждая CS-схема принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке и принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые две строки. Сигналы CMI1 и CMI2 полярности и сигнал сброса "RESET" подают из управляющей схемы 50.
Ниже для удобства описания в качестве примера взяты, главным образом, CS-схемы 42 и 43, которые соответствуют соответственно второй и третьей строкам. На чертеже Фиг. 30 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 3 отображения из восьмого примера и выводят из нее.
Сначала ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI2 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO3 из сдвигового регистра, который был сдвинут в третью строку в схеме 30 управления шинами затворов. Выходной сигнал SRO3 из сдвигового регистра также подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 42a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 42a D-триггера передает состояние ввода (низкий уровень) сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO2 из сдвигового регистра в сигнале M2 является высоким, фиксирует состояние ввода (низкий уровень) сигнала CMI2 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра, и затем сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в следующий раз.
Затем после приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через его контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в третьем кадре.
Следует отметить, что в первой строке сигнал CMI1 полярности является зафиксированным в соответствии с выходными сигналами SRO1 и SRO2 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS1, показанный на чертеже Фиг. 30.
Затем ниже приведено описание изменений форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI2 полярности через свой контакт D для ввода данных и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS3, который схема 43a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра, соответствующий стробирующему сигналу G3, который должен быть подан на шину 12 затворов в третьей строке, выводят из схемы SR3 сдвигового регистра и подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. Затем схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня.
Затем на другой контакт логической схемы 43b "ИЛИ" подают выходной сигнал SRO4 из сдвигового регистра, который был сдвинут в четвертую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO4 из сдвигового регистра также подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра. Схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 43a D-триггера передает состояние ввода (высокий уровень) сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO3 из сдвигового регистра в сигнале M3 является высоким, фиксирует состояние ввода (высокий уровень) сигнала CMI2 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра, и затем сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в следующий раз.
Затем схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра.
Затем схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня в третьем кадре.
Следует отметить, что в четвертой строке сигнал CMI1 полярности является зафиксированным в соответствии с выходными сигналами SRO4 и SRO5 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS4, показанный на чертеже Фиг. 30.
Как описано выше, каждая из CS-схем 41, 42, 43,... и 4n, соответствующая надлежащим строкам, позволяет в каждом кадре при управлении с инверсией двух строк (2H) переключать электрический потенциал CS-сигнала в тот момент времени, когда уровень стробирующего сигнала в соответствующей строке понижается (в момент времени, когда TFT13 переключается из состояния "включен" в состояние "выключен") с высокого уровня до низкого уровня после понижения уровня стробирующего сигнала в этой строке.
То есть, в восьмом примере (i) CS-сигнал CSn, подаваемый на CS-шину 15 в строке номер n, сгенерирован путем фиксации уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала Gn в строке номер n, и уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+1) в строке номер (n+1), и (ii) CS-сигнал CSn+1, подаваемый на CS-шину 15 в строке номер (n+1), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G (n+1) в строке номер (n+1), и уровня электрического потенциала сигнала CMI1 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+2) в строке номер (n+2). Кроме того, (i) CS-сигнал CSn+2, подаваемый на CS-шину 15 в строке номер (n+2), сгенерирован путем фиксации электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+2) в строке номер (n+2), и уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+3) в строке номер (n+3), и (ii) CS-сигнал CSn+3, подаваемый на CS-шину 15 в строке номер (n+3), сгенерирован путем фиксации уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+3) в строке номер (n+3), и уровня электрического потенциала сигнала CMI2 полярности в тот момент времени, когда повышается уровень стробирующего сигнала G(n+4) в строке номер (n+4).
Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в жидкокристаллическом устройстве 3 отображения, в котором используют управление отображением с увеличением размера в два раза. Соответственно, можно устранить неправильные формы сигнала, которые вызывают возникновение поперечных полос. Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигналы CMI1 и CMI2 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 31 показаны соотношения между (i) сигналом CMI1 (или CMI2) полярности и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 31, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность (положительную полярность или отрицательную полярность) в течение этого периода строчной развертки. Например, сигнал CMI1 имеет отрицательную полярность в течение второго периода "B" строчной развертки, имеет положительную полярность в течение третьего периода "C" строчной развертки, имеет отрицательную полярность в течение четвертого периода "D" строчной развертки и имеет положительную полярность в течение пятого периода "E" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1-го по 12-й соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI2 имеет отрицательную полярность в течение первого периода "1" строчной развертки, имеет положительную полярность в течение второго периода "2" строчной развертки, имеет отрицательную полярность в течение третьего периода "3" строчной развертки и имеет положительную полярность в течение четвертого периода "4" строчной развертки. Таким образом, сигналы CMI1 и CMI2 инвертируют свои полярности в каждом периоде строчной развертки, и их полярности являются противоположными друг другу. Каждая из CS-схем 4n принимает один из сигналов CMI1 и CMI2 полярности, которые чередуются через каждые две строки. Например, CS-схема 41 принимает сигнал CMI1, CS-схема 42 принимает сигнал CMI2, CS-схема 43 принимает сигнал CMI2, CS-схема 44 принимает сигнал CMI1, а CS-схема 45 принимает сигнал CMI1 (см. Фиг. 29).
CS-схема 4n принимает, через свой контакт CK для сигнала синхронизации, выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке номер (n+1). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI1 (или CMI2), который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI1 (или CMI2), который CS-схема 4n принимает через свой контакт D для ввода данных в течение (n+1)-го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "B" сигнала CMI1 в течение второго периода строчной развертки. CS-схема 42 устанавливает положительную полярность "2" сигнала CMI2 в течение второго периода строчной развертки и устанавливает отрицательную полярность "3" сигнала CMI2 в течение третьего периода строчной развертки. CS-схема 43 устанавливает отрицательную полярность "3" сигнала CMI2 в течение третьего периода строчной развертки и устанавливает положительную полярность "4" сигнала CMI2 в течение четвертого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки и устанавливает положительную полярность "E" сигнала CMI1 в течение пятого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг. 28 и Фиг. 30.
ДЕВЯТЫЙ ПРИМЕР
На чертеже Фиг. 32 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве 3 отображения, в котором используется управление с инверсией трех строк (3H). На чертеже Фиг. 32, аналогично восьмому примеру, сигналы CMI1 и CMI2 полярности заданы таким образом, что сигналы CMI1 и полярности CMI2 изменяют свои полярности на обратные через каждый период строчной развертки (1H), и сигналы CMI1 и CMI2 полярности являются обратными друг другу по их полярности.
Как показано на чертеже Фиг. 32, во время исходного состояния CS-сигналы все CS1-CS7 имеют один фиксированный электрический потенциал (на чертеже Фиг. 32 - низкий уровень). В первом кадре уровень CS-сигнала CS1 в первой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G1. Уровень CS-сигнала CS2 во второй строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G2. Уровень CS-сигнала CS3 в третьей строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G3. В отличие от этого, уровень CS-сигнала CS4 в четвертой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G4. Уровень CS-сигнала CS5 в пятой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G5. Уровень CS-сигнала CS6 в шестой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G6. Уровень CS-сигнала CS7 в седьмой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G7.
Здесь следует отметить, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и который изменяет свою полярность на обратную через каждые три периода строчной развертки (3H). Сигнал S, подаваемый на исток, имеет одинаковый электрический потенциал (уровень серого) в течение трех смежных периодов строчной развертки (3H) и имеет одинаковый электрический потенциал (уровень серого) в течение следующих трех смежных периодов строчной развертки (3H). То есть, каждая из ссылочных позиций с "AA" по"SA", показанных на чертеже Фиг. 32, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, сигнал S, подаваемый на исток в первом кадре, имеет идентичные потенциалы сигнала отрицательной полярности ("AA") в течение первого, второго и третьего периодов строчной развертки и имеет идентичные потенциалы сигнала положительной полярности ("KA") в течение четвертого, пятого и шестого периодов строчной развертки. Кроме того, сигнал S, подаваемый на исток во втором кадре, имеет идентичные потенциалы сигнала положительной полярности ("II") в течение первого, второго и третьего периодов строчной развертки и имеет идентичные потенциалы сигнала отрицательной полярности ("KI") в течение четвертого, пятого и шестого периодов строчной развертки. Между тем, стробирующие сигналы G1-G7 служат в качестве потенциалов "затвор включен" в течение периодов 1H, соответственно, с первого по седьмой в активном периоде (в эффективном периоде развертки) каждого кадра и служат в качестве потенциалов "затвор выключен" в течение других периодов.
Затем уровни CS-сигналов CS1-CS7 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G7. В частности, в первом кадре уровень CS-сигналов CS1, CS2 и CS3 понижается после понижения уровня соответствующих им стробирующих сигналов G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 повышается после понижения уровня соответствующих им стробирующих сигналов G4, G5 и G6. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровень CS-сигналов CS1, CS2 и CS3 повышается после понижения уровня соответствующих им стробирующих сигналов G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 понижается после понижения уровня соответствующих им стробирующих сигналов G4, G5 и G6.
Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и позволяет улучшить качество отображения.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
На чертеже Фиг. 33 показана конфигурация схемы 30 управления шинами затворов и схемы 40 управления CS-шинами. Входными сигналами, которые подают в CS-схему 41, являются выходные сигналы SRO1 и SRO2 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G1 и G2, сигнал CMI1 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 42, являются выходные сигналы SRO2 и SRO3 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G2 и G3, сигнал CMI2 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 43, являются выходные сигналы SRO3 и SRO4 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G3 и G4, сигнал CMI1 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 44, являются выходные сигналы SRO4 и SRO5 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G4 и G5, сигнал CMI1 полярности и сигнал сброса "RESET". Как описано выше, каждая CS-схема принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке и регулярно принимает один из сигналов CMI1 и CMI2 полярности (со строки номер n в следующем порядке: CMI1, CMI2, CMI1, CMI1, CMI2 и CMI1). Сигналы CMI1 и CMI2 полярности и сигнал сброса "RESET" подают из управляющей схемы 50.
Ниже для удобства описания в качестве примера взяты, главным образом, CS-схемы 42, 43 и 44, которые соответствуют, соответственно, второй, третьей и четвертой строкам. На чертеже Фиг. 34 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 3 отображения из девятого примера и выводят из нее.
Сначала ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI2 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO3 из сдвигового регистра, который был сдвинут в третью строку в схеме 30 управления шинами затворов. Выходной сигнал SRO3 из сдвигового регистра также подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 42a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 42a D-триггера передает состояние ввода (низкий уровень) сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO2 из сдвигового регистра в сигнале M2 является высоким, фиксирует состояние ввода (низкий уровень) сигнала CMI2 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра, и затем сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в следующий раз.
Затем, после приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в третьем кадре.
Следует отметить, что в первой строке сигнал CMI1 полярности является зафиксированным в соответствии с выходными сигналами SRO1 и SRO2 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS1, показанный на чертеже Фиг. 34.
Затем, ниже приведено описание изменений форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS3, который схема 43a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра, соответствующий стробирующему сигналу G3, который должен быть подан на шину 12 затворов в третьей строке, выводят из схемы SR3 сдвигового регистра и подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Затем схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня.
Затем на другой контакт логической схемы 43b "ИЛИ" подают выходной сигнал SRO4 из сдвигового регистра, который был сдвинут в четвертую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO4 из сдвигового регистра также подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра. Схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 43a D-триггера передает состояние ввода (низкий уровень) сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO3 из сдвигового регистра в сигнале M3 является высоким, фиксирует состояние ввода (низкий уровень) сигнала CMI1 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра, и затем сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня в следующий раз.
Затем, после приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 43a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI1 полярности в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в третьем кадре.
Затем, ниже приведено описание изменений форм различных сигналов в четвертой строке. Во время исходного состояния схема 44a D-триггера в CS-схеме 44 принимает сигнал CMI1 полярности через свой контакт D для ввода данных и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS4, который схема 44a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO4 из сдвигового регистра в четвертой строке выводят из схемы SR4 сдвигового регистра и подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. Затем схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня.
Затем на другой контакт логической схемы 44b "ИЛИ" подают выходной сигнал SRO5 из сдвигового регистра, который был сдвинут в пятую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO5 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 45.
Схема 44a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра. Схема 44a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 44a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 44a D-триггера передает состояние ввода (высокий уровень) сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO4 из сдвигового регистра в сигнале M4 является высоким, фиксирует состояние ввода (высокий уровень) сигнала CMI2 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра, и затем сохраняет этот высокий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня в следующий раз.
Схема 44a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра.
Схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня в третьем кадре.
Следует отметить, что в пятой строке сигнал CMI2 полярности является зафиксированным в соответствии с выходными сигналами SRO5 и SRO6 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS5, показанный на чертеже Фиг. 34.
Как было описано выше, согласно девятому примеру, управление с инверсией трех строк (3H) может быть реализовано путем регулирования в жидкокристаллическом устройстве 3 отображения, сконфигурированном так, как показано на чертеже Фиг. 33, соотношений между сигналами CMI1 и CMI2 полярности и CS-схемами. Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в жидкокристаллическом устройстве 3 отображения, в котором используют управление отображением с увеличением размера в три раза. Соответственно, можно устранить неправильные формы сигнала, которые вызывают возникновение поперечных полос. Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигналы CMI1 и CMI2 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 35 показаны соотношения между (i) сигналом CMI1 (или CMI2) полярности и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 35, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность (положительную полярность или отрицательную полярность) в течение этого периода строчной развертки. Например, сигнал CMI1 имеет отрицательную полярность в течение второго периода "B" строчной развертки, имеет положительную полярность в течение третьего периода "C" строчной развертки, имеет отрицательную полярность в течение четвертого периода "D" строчной развертки и имеет положительную полярность в течение пятого периода "E" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1-го по 12-й соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, CMI2 имеет отрицательную полярность в течение первого периода "1" строчной развертки, имеет положительную полярность в течение второго периода "2" строчной развертки, имеет отрицательную полярность в течение третьего периода "3" строчной развертки и имеет положительную полярность в течение четвертого периода "4" строчной развертки. Таким образом, сигналы CMI1 и CMI2 инвертируют свои полярности в каждом периоде строчной развертки, и их полярности являются противоположными друг другу. Кроме того каждая из CS-схем регулярно принимает один из сигналов CMI1 и CMI2 полярности (CS-схема 41 принимает сигнал CMI1, CS-схема 42 принимает сигнал CMI2, CS-схема 43 принимает сигнал CMI1, CS-схема 44 принимает сигнал CMI1, CS-схема 45 принимает сигнал CMI2 и CS-схема 46 принимает сигнал CMI1).
CS-схема 4n принимает через свой контакт CK для сигнала синхронизации выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке номер (n+1). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение (n+1)го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "B" сигнала CMI1 в течение второго периода строчной развертки. CS-схема 42 устанавливает положительную полярность "2" сигнала CMI2 в течение второго периода строчной развертки и устанавливает отрицательную полярность "3" сигнала CMI2 в течение третьего периода строчной развертки. CS-схема 43 устанавливает положительную полярность "C" сигнала CMI1 в течение третьего периода строчной развертки и устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки и устанавливает положительную полярность "E" сигнала CMI1 в течение пятого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг. 32 и Фиг. 34.
Как было описано в восьмом и девятом примерах, управление с инверсией двух строк (2H) и управление с инверсией трех строк (3H) могут быть реализованы с использованием двух сигналов CMI1, CMI2 полярности, имеющих отличающиеся друг от друга фазы. Аналогичным образом, управление с инверсией четырех строк (4H),..., n строк (nH) может быть реализовано путем регулирования соотношений между сигналами CMI1 и CMI2 полярности и CS-схемами. Это позволяет реализовать управление отображением с увеличением размера в два раза и управление отображением с увеличением размера в три раза. Аналогичным образом, управление отображением с увеличением размера в четыре раза,..., с увеличением размера в n раз может быть реализовано путем регулирования тех привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные.
ДЕСЯТЫЙ ПРИМЕР
Ниже описано другое жидкокристаллическое устройство 3 отображения, в котором реализовано управление с инверсией трех строк (3H). На чертеже Фиг. 37 изображена временная диаграмма, на которой показаны формы различных сигналов в другом жидкокристаллическом устройстве 3 отображения. Следует отметить, что на чертеже Фиг. 37 сигналы CMI1 и CMI2 полярности заданы таким образом, что сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные через каждые два периода строчной развертки (2H), и сигналы CMI1 и CMI2 полярности являются обратными друг другу по их полярности.
Как показано на чертеже Фиг. 37, во время исходного состояния все CS-сигналы CS1-CS7 имеют один фиксированный электрический потенциал (на чертеже Фиг. 37 - низкий уровень). В первом кадре уровень CS-сигнала CS1 в первой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G1, уровень CS-сигнала CS2 во второй строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G2, и уровень CS-сигнала CS3 в третьей строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G3. В отличие от этого, уровень CS-сигнала CS4 в четвертой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G4, уровень CS-сигнала CS5 в пятой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G5, и уровень CS-сигнала CS6 в шестой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G6. Уровень CS-сигнала CS7 в седьмой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G7.
Здесь следует отметить, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и изменяет свою полярность на обратную через каждые три периода строчной развертки (3H). Сигнал S, подаваемый на исток, имеет одинаковый электрический потенциал в течение трех смежных периодов строчной развертки (3H) и имеет одинаковый электрический потенциал в следующих трех смежных периодах строчной развертки (3H). То есть, каждая из ссылочных позиций с "AA" по "SA", показанных на чертеже Фиг. 37, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, сигнал S, подаваемый на исток в первом кадре, имеет идентичные потенциалы сигнала (уровень серого) отрицательной полярности ("AA") в течение первого, второго и третьего периодов строчной развертки и имеет идентичные потенциалы сигнала положительной полярности ("KA") в течение четвертого, пятого и шестого периодов строчной развертки. Кроме того, сигнал S, подаваемый на исток во втором кадре, имеет идентичные потенциалы сигнала положительной полярности ("II") в течение первого, второго и третьего периодов строчной развертки и имеет идентичные потенциалы сигнала отрицательной полярности ("KI") в течение четвертого, пятого и шестого периодов строчной развертки. Между тем, стробирующие сигналы G1-G7 служат в качестве потенциалов "затвор включен" в течение периодов 1H, соответственно, с первого по седьмой в активном периоде (в эффективном периоде развертки) каждого кадра и служат в качестве потенциалов "затвор выключен" в течение других периодов.
Затем уровни CS-сигналов CS1-CS7 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G7. В частности, в первом кадре уровень CS-сигналов CS1, CS2 и CS3 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G4, G5 и G6. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровень CS-сигналов CS1, CS2, и CS3 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1, G2, и G3, а уровень CS-сигналов CS4, CS5 и CS6 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G4, G5 и G6.
Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и позволяет улучшить качество отображения.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
На чертеже Фиг. 36 показана конфигурация схемы 30 управления шинами затворов и схемы 40 управления CS-шинами. Каждая из CS-схем принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+2 из сдвигового регистра в строке номер (n+2) и принимает сигнал CMI1 или CMI2 полярности.
В приведенном ниже описании рассмотрено управление с инверсией трех строк (3H) со ссылкой на чертежи Фиг. 37 и Фиг. 38. В приведенном ниже описании опущены соединения в схеме 30 управления шинами затворов и в схеме 40 управления CS-шинами. На чертеже Фиг. 38 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 3 отображения из десятого примера и выводят из нее. Ниже для удобства описания операции, выполняемые в первом кадре, объяснены на примере CS-схем 42, 43 и 44, которые соответствуют строкам, соответственно, со второй по четвертую.
Сначала ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO4 из сдвигового регистра, который был сдвинут в четвертую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO4 из сдвигового регистра также подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра. Схема 42a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Следует отметить, что в первой строке сигнал CMI1 полярности является зафиксированным в соответствии с выходными сигналами SRO1 и SRO3 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS1, показанный на чертеже Фиг. 38.
Затем, ниже приведено описание изменений форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI2 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS3, который схема 43a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра, соответствующий стробирующему сигналу G3, который должен быть подан на шину 12 затворов в третьей строке, выводят из схемы SR3 сдвигового регистра и подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 схема 43a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Затем схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня.
Затем на другой контакт логической схемы 43b "ИЛИ" подают выходной сигнал SRO5 из сдвигового регистра, который был сдвинут в пятую строку в схеме 30 управления шинами затворов. Следует отметить, что выходной сигнал SRO5 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 45.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра. Схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Затем, ниже приведено описание изменений форм различных сигналов в четвертой строке. Во время исходного состояния схема 44a D-триггера в CS-схеме 44 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS4, который схема 44a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO4 из сдвигового регистра в четвертой строке выводят из схемы SR4 сдвигового регистра и подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 схема 44a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. Затем схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня.
Затем на другой контакт логической схемы 44b "ИЛИ" подают выходной сигнал SRO6 из сдвигового регистра, который был сдвинут в шестую строку в схеме 30 управления шинами затворов. Следует отметить, что выходной сигнал SRO6 из сдвигового регистра также подают на один из контактов логической схемы 46b "ИЛИ" в CS-схеме 46.
Схема 44a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра. Схема 44a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 44a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня во втором кадре.
Следует отметить, что в пятой строке сигнал CMI2 полярности является зафиксированным в соответствии с выходными сигналами SRO5 и SRO7 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS5, показанный на чертеже Фиг. 38.
Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в жидкокристаллическом устройстве 3 отображения, в котором используют управление отображением с увеличением размера в три раза. Соответственно, можно устранить неправильные формы сигнала, которые вызывают возникновение поперечных полос. Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигналы CMI1 и CMI2 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 39 показаны соотношения между (i) сигналом CMI1 (или CMI2) полярности и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 39, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI1 имеет положительную полярность в течение второго периода "B" строчной развертки, имеет отрицательную полярность в течение третьего периода "C" строчной развертки, имеет отрицательную полярность в течение четвертого периода "D" строчной развертки и имеет положительную полярность в течение пятого периода "E" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1-го по 12-й соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, CMI2 имеет отрицательную полярность в течение первого периода "1" строчной развертки, имеет отрицательную полярность в течение второго периода "2" строчной развертки, имеет положительную полярность в течение третьего периода "3" строчной развертки и имеет положительную полярность в течение четвертого периода "4" строчной развертки. Каждая из CS-схем 4n принимает один из сигналов CMI1 и CMI2 полярности согласно заданному правилу.
CS-схема 4n принимает через свой контакт CK для сигнала синхронизации выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+2 из сдвигового регистра в строке номер (n+2). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение (n+2)-го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "C" сигнала CMI1 в течение третьего периода строчной развертки. CS-схема 42 устанавливает положительную полярность "B" сигнала CMI1 в течение второго периода строчной развертки и устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки. CS-схема 43 устанавливает положительную полярность "3" сигнала CMI2 в течение третьего периода строчной развертки и устанавливает отрицательную полярность "5" сигнала CMI2 в течение пятого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки и устанавливает положительную полярность "F" сигнала CMI1 в течение шестого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг. 37 и Фиг. 38.
ОДИННАДЦАТЫЙ ПРИМЕР
Жидкокристаллическое устройство 3 отображения, которое описано в восьмом примере и в котором используется управление отображением с увеличением размера в два раза, может иметь такую компоновку, которая описана ниже. А именно, эта компоновка является такой, что CS-схема 4n в строке номер n принимает выходной сигнал SROn из сдвигового регистра соответствующей строки номер n и выходной сигнал SROn+3 из сдвигового регистра в строке номер (n+3).
На чертеже Фиг. 40 показана конфигурация схемы 30 управления шинами затворов и схемы 40 управления CS-шинами. Например, логическая схема 42b "ИЛИ" CS-схемы 42 принимает выходной сигнал SRO2 из сдвигового регистра и выходной сигнал SRO5 из сдвигового регистра в пятой строке, схема 42a D-триггера CS-схемы 42 принимает сигнал CMI1 полярности через свой контакт D. Логическая схема 43b "ИЛИ" в CS-схеме 43 принимает выходной сигнал SRO3 из сдвигового регистра и выходной сигнал SRO6 из сдвигового регистра в шестой строке, а схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI2 полярности через свой контакт D.
На чертеже Фиг. 41 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве 3 отображения, которое имеет такую компоновку и в котором используется управление отображением с увеличением размера в два раза. Следует отметить, что сигналы CMI1 и CMI2 полярности заданы таким образом, что сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные через каждые два периода строчной развертки (2H), и сигналы CMI1 и CMI2 полярности являются обратными друг другу по их полярности.
На чертеже Фиг. 42 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 3 отображения из одиннадцатого примера и выводят из нее. На чертеже Фиг. 43 показаны соотношения между (i) сигналом CMI1 (или CMI2) полярности и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами, которые выводят из CS-схем 4n. Описание функционирования CS-схем здесь опущено, поскольку это функционирование является аналогичным описанному ранее в каждом из примеров (в особенности, в пятом примере).
ЧЕТВЕРТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже приведено описание четвертого варианта осуществления настоящего изобретения со ссылкой на чертежи Фиг. 44 - Фиг. 51. Следует отметить следующее: для удобства описания элементам, имеющим функции, идентичные функциям соответствующих элементов, описанных в первом варианте осуществления изобретения, присвоены соответствующие идентичные номера позиций, и их описания здесь опущены. Также следует отметить, что термины, определенные в первом варианте осуществления изобретения, использованы в данных примерах также согласно этим определениям, если не указано иное.
Схемная компоновка жидкокристаллического устройства 4 отображения согласно данному варианту осуществления изобретения является идентичной схемной компоновке жидкокристаллического устройства 1 отображения из первого варианта осуществления изобретения (см. чертежи Фиг. 1 и Фиг. 2). Соответственно, описание схемной компоновки жидкокристаллического устройства 4 отображения здесь опущено. В частности, в приведенном ниже описании рассмотрена схема 30 управления шинами затворов и схема 40 управления CS-шинами из данного варианта осуществления изобретения. В жидкокристаллическом устройстве 4 отображения предусмотрено наличие множества сигнальных шин для подачи сигналов CMI полярности из управляющей схемы 50 (см. Фиг. 1) в схему 40 управления CS-шинами. Для реализации управления с инверсией n-строк (nH) для осуществления управления отображением с увеличением размера в n раз при такой компоновке отрегулируют (i) количество сигналов CMI полярности и (ii) привязку по времени (частоту), в которые сигналы CMI полярности инвертируют свои полярности. Описание конкретных примеров приведено ниже.
ДВЕНАДЦАТЫЙ ПРИМЕР
На чертеже Фиг. 44 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве 4 отображения, которое осуществляет управление с инверсией трех строк (3H). На чертеже Фиг. 44 сигналы CMI1, CMI2 и CMI3 полярности изменяют свои полярности на обратные через каждые три периода строчной развертки (3H), и сигналы CMI1 и CMI2 имеют сдвиг по фазе один относительно другого на один период строчной развертки (1H), при этом сигналы CMI2 и CMI3 имеют сдвиг по фазе один относительно другого на один период строчной развертки (1H).
Как показано на чертеже Фиг. 44, во время исходного состояния все CS-сигналы CS1-CS7 имеют один фиксированный электрический потенциал (на чертеже Фиг. 44 - низкий уровень). В первом кадре уровень CS-сигнала CS1 в первой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G1, уровень CS-сигнала CS2 во второй строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G2, и уровень CS-сигнала CS3 в третьей строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G3. В отличие от этого, уровень CS-сигнала CS4 в четвертой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G4, уровень CS-сигнала CS5 в пятой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G5, и уровень CS-сигнала CS6 в шестой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G6. Уровень CS-сигнала CS7 в седьмой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G7.
Здесь следует отметить, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и который изменяет свою полярность на обратную через каждые 3H периодов. Сигнал S, подаваемый на исток, имеет одинаковый электрический потенциал в течение трех смежных периодов строчной развертки (3H) и имеет одинаковый электрический потенциал в течение следующих трех смежных периодов строчной развертки (3H). То есть, каждая из ссылочных позиций с "AA" по "SA", показанных на чертеже Фиг. 44, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, сигнал S, подаваемый на исток в первом кадре, имеет идентичные потенциалы сигнала (уровень серого) отрицательной полярности ("AA") в течение первого, второго и третьего периодов строчной развертки и имеет идентичные потенциалы сигнала положительной полярности ("KA") в течение четвертого, пятого и шестого периодов строчной развертки. Кроме того сигнал S, подаваемый на исток во втором кадре, имеет идентичные потенциалы сигнала положительной полярности ("II") в течение первого, второго и третьего периодов строчной развертки и имеет идентичные потенциалы сигнала отрицательной полярности ("KI") в течение четвертого, пятого и шестого периодов строчной развертки. Между тем, стробирующие сигналы G1-G7 служат в качестве потенциалов "затвор включен" в течение периодов 1H, соответственно, с первого по седьмой в активном периоде (в эффективном периоде развертки) каждого кадра и служат в качестве потенциалов "затвор выключен" в течение других периодов.
Затем уровни CS-сигналов CS1-CS7 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G7. В частности, в первом кадре уровень CS-сигналов CS1, CS2 и CS3 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G4, G5 и G6. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровень CS-сигналов CS1, CS2 и CS3 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно, G4, G5 и G6.
Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и позволяет улучшить качество отображения.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
На чертеже Фиг. 45 показана конфигурация схемы 30 управления шинами затворов и схемы 40 управления CS-шинами. Входными сигналами, которые подают в CS-схему 41, являются выходные сигналы SRO1 и SRO2 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G1 и G2, сигнал CMI1 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 42, являются выходные сигналы SRO2 и SRO3 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G2 и G3, сигнал CMI2 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 43, являются выходные сигналы SRO3 и SRO4 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G3 и G4, сигнал CMI3 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 44, являются выходные сигналы SRO4 и SRO5 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G4 и G5, сигнал CMI1 полярности и сигнал сброса "RESET". Как описано выше, каждая CS-схема 4n принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке и регулярно принимает один из сигналов CMI1 и CMI2 полярности (со строки номер n в порядке в следующем порядке: CMI1, CMI2, CMI3, CMI1, CMI2 и CMI3). Сигналы CMI1, CMI2 и CMI3 полярности и сигнал сброса "RESET" подают из управляющей схемы 50.
Ниже для удобства описания в качестве примера взяты, главным образом, CS-схемы 42 и 43, которые соответствуют, соответственно, второй и третьей строкам. На чертеже Фиг. 46 показаны формы различных сигналов, которые вводят в схему 40 управления CS-шинами в жидкокристаллическом устройстве 4 отображения из двенадцатого примера и выводят из нее.
Сначала ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI2 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO3 из сдвигового регистра, который был сдвинут в третью строку в схеме 30 управления шинами затворов. Выходной сигнал SRO3 из сдвигового регистра также подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 42a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 42a D-триггера передает состояние ввода (низкий уровень) сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO2 из сдвигового регистра в сигнале M2 является высоким, фиксирует состояние ввода (низкий уровень) сигнала CMI2 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра, и затем сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в следующий раз.
Затем, после приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня в третьем кадре.
Следует отметить, что в первой строке сигнал CMI1 полярности является зафиксированным в соответствии с выходными сигналами SRO1 и SRO2 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS1, показанный на чертеже Фиг. 46.
Затем, ниже приведено описание изменений форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI3 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS3, который схема 43a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра, соответствующий стробирующему сигналу G3, который должен быть подан на шину 12 затворов в третьей строке, выводят из схемы SR3 сдвигового регистра и подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 схема 43a D-триггера передает состояние ввода сигнала CMI3 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Затем схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI3 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня.
Затем выходной сигнал SRO4 из сдвигового регистра, который был сдвинут в четвертую строку в схеме 30 управления шинами затворов, подают на другой контакт логической схемы 43b "ИЛИ". Следует отметить, что выходной сигнал SRO4 из сдвигового регистра также подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI3 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра. Схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI3 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 43a D-триггера передает состояние ввода (низкий уровень) сигнала CMI3 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO3 из сдвигового регистра в сигнале M3 является высоким, фиксирует состояние ввода (низкий уровень) сигнала CMI3 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра, и затем сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня в следующий раз.
Затем, после приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера передает состояние ввода сигнала CMI3 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI3 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня в третьем кадре.
Затем, ниже приведено описание изменений форм различных сигналов в четвертой строке. Во время исходного состояния схема 44a D-триггера в CS-схеме 44 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS4, который схема 44a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO4 из сдвигового регистра в четвертой строке выводят из схемы SR4 сдвигового регистра и подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. Затем схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня.
Затем на другой контакт логической схемы 44b "ИЛИ" подают выходной сигнал SRO5 из сдвигового регистра, который был сдвинут в пятую строку в схеме 30 управления шинами затворов. Следует отметить, что выходной сигнал SRO5 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 45.
Схема 44a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра. Схема 44a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем, после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 44a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня во втором кадре.
Во втором кадре схема 44a D-триггера передает состояние ввода (высокий уровень) сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в течение промежутка времени, когда уровень выходного сигнала SRO4 из сдвигового регистра в сигнале M4 является высоким, фиксирует состояние ввода (высокий уровень) сигнала CMI2 полярности, принятого ею в тот момент времени, когда был принят изменившийся уровень (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра, и затем сохраняет этот высокий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня в следующий раз.
Затем, после приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра.
Схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня в третьем кадре.
Следует отметить, что в пятой строке сигнал CMI2 полярности является зафиксированным в соответствии с выходными сигналами SRO5 и SRO6 из сдвиговых регистров, в силу чего на выходе получают CS-сигнал CS5, показанный на чертеже Фиг. 46.
Как было описано выше, согласно двенадцатому примеру управление с инверсией трех строк (3H) может быть реализовано с использованием сигналов CMI1, CMI2 и CMI3 полярности, которые изменяют свои полярности на обратные через каждые три строки (3H) и которые не совпадают друг с другом. Это позволяет схеме 40 управления CS-шинами функционировать надлежащим образом даже в жидкокристаллическом устройстве 4 отображения, в котором используют управление отображением с увеличением размера в три раза. Соответственно, можно устранить неправильные формы сигнала, которые вызывают возникновение поперечных полос. Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и, следовательно, улучшить качество отображения.
В приведенном ниже описании рассмотрено то, как сигналы CMI1, CMI2 и CMI3 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 47 показаны соотношения между (i) сигналом полярности (любым из сигналов CMI1, CMI2 и CMI3) и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 47, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность (положительную полярность или отрицательную полярность) в течение этого периода строчной развертки. Например, сигнал CMI1 имеет положительную полярность в течение первого периода "A" строчной развертки, имеет отрицательную полярность в течение второго периода "B" строчной развертки, имеет отрицательную полярность в течение третьего периода "C" строчной развертки и имеет отрицательную полярность в течение четвертого периода "D" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1-го по 12 соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI2 имеет положительную полярность в течение первого периода "1" строчной развертки, имеет положительную полярность в течение второго периода "2" строчной развертки, имеет отрицательную полярность в течение третьего периода "3" строчной развертки и имеет отрицательную полярность в течение четвертого периода "4" строчной развертки. Что касается сигнала CMI3, то каждый из знаков с "a" по "l" соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI3 имеет положительную полярность в течение первого периода "a" строчной развертки, имеет положительную полярность в течение второго периода "b" строчной развертки, имеет положительную полярность в течение третьего периода "c" строчной развертки и имеет отрицательную полярность в течение четвертого периода "d" строчной развертки. Таким образом, сигналы CMI1, CMI2, и CMI3 инвертируют свои полярности через каждые три периода строчной развертки, и сигналы CMI1 и CMI2 имеют разность фаз один относительно другого на один период строчной развертки, при этом сигналы CMI2 и CMI3 имеют разность фаз один относительно другого на один период строчной развертки. Кроме того, каждая из CS-схем регулярно принимает один из сигналов CMI1, CMI2 и CMI3 полярности (CS-схема 41 принимает сигнал CMI1, CS-схема 42 принимает сигнал CMI2, CS-схема 43 принимает сигнал CMI3, CS-схема 44 принимает сигнал CMI1, CS-схема 45 принимает сигнал CMI2, а CS-схема 46 принимает сигнал CMI3).
CS-схема 4n принимает через свой контакт CK для сигнала синхронизации выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке номер (n+1). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение (n+1)-го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "B" сигнала CMI1 в течение второго периода строчной развертки. CS-схема 42 устанавливает положительную полярность "2" сигнала CMI2 в течение второго периода строчной развертки и устанавливает отрицательную полярность "3" сигнала CMI2 в течение третьего периода строчной развертки. CS-схема 43 устанавливает положительную полярность "c" сигнала CMI3 в течение третьего периода строчной развертки и устанавливает отрицательную полярность "d" сигнала CMI3 в течение четвертого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки и устанавливает положительную полярность "E" сигнала CMI1 в течение пятого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг. 44 и Фиг. 46.
Как было описано в двенадцатом примере, управление с инверсией трех строк (3H) может быть реализовано с использованием множества сигналов CMI1, CMI2 и CMI3 полярности, которые отличаются друг от друга по частоте. Аналогичным образом, управление с инверсией четырех строк (4H),..., n строк (nH) может быть реализовано путем изменения частоты и количества сигналов полярности. Например, управление с инверсией четырех строк (4H) может быть реализовано (i) с использованием четырех сигналов CMI1-CMI4 полярности, (ii) путем задания такой частоты каждого из сигналов полярности, чтобы сигналы полярности изменяли свои полярности на обратные через каждые четыре строки (4H), и (iii) путем последовательной подачи сигналов полярности в CS-схемы. Это позволяет реализовать управление отображением с увеличением размера в два раза и управление отображением с увеличением размера в три раза. Аналогичным образом, управление отображением с увеличением размера в четыре раза,..., с увеличением размера в n раз может быть реализовано путем регулирования тех привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные.
ТРИНАДЦАТЫЙ ПРИМЕР
Двенадцатый пример сконфигурирован таким образом, что CS-схема 4n в строке номер n принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+1 из сдвигового регистра в следующей строке номер (n+1). Однако конфигурация жидкокристаллического устройства 4 отображения из настоящего изобретения не ограничена этим вариантом. Например, как показано на чертеже Фиг. 49, жидкокристаллическое устройство 4 отображения также может быть сконфигурировано так, что CS-схема 4n в строке номер n принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+3 из сдвигового регистра в строке номер (n+3). То есть, CS-схема 41 принимает выходной сигнал SRO1 из сдвигового регистра в соответствующей первой строке и выходной сигнал SRO4 из сдвигового регистра в четвертой строке. На чертеже Фиг. 48 изображена временная диаграмма, на которой показаны формы различных сигналов в жидкокристаллическом устройстве 4 отображения, которое имеет такую компоновку и в котором используется управление отображением с увеличением размера в три раза. На чертеже Фиг. 48, как и в случае из двенадцатого примера, сигналы CMI1, CMI2 и CMI3 полярности изменяют свои полярности на обратные через каждые три периода строчной развертки (3H), и сигналы CMI1 и CMI2 имеют сдвиг по фазе один относительно другого на один период строчной развертки (1H), при этом сигналы CMI2 и CMI3 имеют сдвиг по фазе один относительно другого на один период строчной развертки (1H). Кроме того, в тринадцатом примере сигналы CMI1, CMI2 и CMI3 полярности инвертируют свои полярности при иных привязках по времени, чем в двенадцатом примере.
Как показано на чертеже Фиг. 48, во время исходного состояния все CS-сигналы CS1-CS7 имеют один фиксированный электрический потенциал (на чертеже Фиг. 48 - низкий уровень). Во время первого кадра уровень CS-сигнала CS1 в первой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G1, уровень CS-сигнала CS2 во второй строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G2, и уровень CS-сигнала CS3 в третьей строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G3. В отличие от этого уровень CS-сигнала CS4 в четвертой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G4, уровень CS-сигнала CS5 в пятой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G5, и уровень CS-сигнала CS6 в шестой строке является низким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G6. Уровень CS-сигнала CS7 в седьмой строке является высоким в тот момент времени, когда понижается уровень соответствующего стробирующего сигнала G7.
Здесь следует отметить, что сигналом S, подаваемым на исток, является сигнал, который имеет амплитуду, соответствующую уровню серого, представленному видеосигналом, и который изменяет свою полярность на обратную через каждые 3H периода. Сигнал S, подаваемый на исток, имеет одинаковый электрический потенциал в течение трех смежных периодов строчной развертки (3H) и имеет одинаковый электрический потенциал в течение следующих трех смежных периодов строчной развертки (3H). То есть, каждая из ссылочных позиций "AA"-"SA", показанных на чертеже Фиг. 48, соответствует одному периоду строчной развертки и указывает потенциал сигнала (уровень серого) в течение этого периода строчной развертки. Например, сигнал S, подаваемый на исток в первом кадре, имеет идентичные потенциалы сигнала (уровень серого) отрицательной полярности ("AA") в течение первого, второго и третьего периодов строчной развертки и имеет идентичные потенциалы сигнала положительной полярности ("KA") в течение четвертого, пятого и шестого периодов строчной развертки. Кроме того, сигнал S, подаваемый на исток во втором кадре, имеет идентичные потенциалы сигнала положительной полярности ("II") в течение первого, второго и третьего периодов строчной развертки и имеет идентичные потенциалы сигнала отрицательной полярности ("KI") в течение четвертого, пятого и шестого периодов строчной развертки. Между тем стробирующие сигналы G1-G7 служат в качестве потенциалов "затвор включен" в течение периодов 1H соответственно с первого по седьмой в активном периоде (в эффективном период развертки) каждого кадра и служат в качестве потенциалов "затвор выключен" в течение других периодов.
Затем уровни CS-сигналов CS1-CS7 переключаются между высоким и низким уровнями электрического потенциала после понижения уровня соответствующих им стробирующих сигналов G1-G7. В частности, в первом кадре уровень CS-сигналов CS1, CS2 и CS3 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно G4, G5 и G6. Следует отметить, что во втором кадре это соотношение является обратным, то есть уровень CS-сигналов CS1, CS2 и CS3 повышается после понижения уровня соответствующих им стробирующих сигналов, соответственно G1, G2 и G3, а уровень CS-сигналов CS4, CS5 и CS6 понижается после понижения уровня соответствующих им стробирующих сигналов, соответственно G4, G5 и G6.
Это позволяет устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, и позволяет улучшить качество отображения.
Здесь приведено описание конкретной конфигурации схемы 30 управления шинами затворов и схемы 40 управления CS-шинами для реализации вышеупомянутого управления.
На чертеже Фиг. 49 показана конфигурация схемы 30 управления шинами затворов и схемы 40 управления CS-шинами. Входными сигналами, которые подают в CS-схему 41, являются выходные сигналы SRO1 из сдвиговых регистров и SRO4, которые соответствуют соответствующим стробирующим сигналам G1 и G4, сигнал CMI1 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 42, являются выходные сигналы SRO2 из сдвиговых регистров и SRO5, которые соответствуют соответствующим стробирующим сигналам G2 и G5, сигнал CMI2 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 43, являются выходные сигналы SRO3 и SRO6 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G3 и G6, сигнал CMI3 полярности и сигнал сброса "RESET". Входными сигналами, которые подают в CS-схему 44, являются выходные сигналы SRO4 и SRO7 из сдвиговых регистров, которые соответствуют соответствующим стробирующим сигналам G4 и G7, сигнал CMI1 полярности и сигнал сброса "RESET". Как описано выше, каждая CS-схема 4n принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал SROn+3 из сдвигового регистра в следующей строке и принимает один из сигналов CMI1, CMI2 и CMI3 полярности, которые последовательно подают с одной строки до другой (со строки номер n в следующем порядке: CMI1, CMI2, CMI3, CMI1, CMI2 и CMI3). Сигналы CMI1, CMI2 и CMI3 полярности и сигнал сброса "RESET" подают из управляющей схемы 50.
Ниже для удобства описания операции, выполняемые в первом кадре, объяснены на примере CS-схем 42, 43 и 44, которые соответствуют строкам соответственно со второй по четвертую.
Сначала ниже приведено описание изменений форм различных сигналов во второй строке. Во время исходного состояния схема 42a D-триггера в CS-схеме 42 принимает сигнал CMI2 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS2, который схема 42a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO2 из сдвигового регистра, соответствующий стробирующему сигналу G2, который должен быть подан на шину 12 затворов во второй строке, выводят из схемы SR2 сдвигового регистра и подают на один из контактов логической схемы 42b "ИЛИ" в CS-схеме 42. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра через свой контакт CK для сигнала синхронизации схема 42a D-триггера передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D для ввода данных в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра. Схема 42a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO2 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 42a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 42b "ИЛИ" подают выходной сигнал SRO5 из сдвигового регистра, который был сдвинут в пятую строку в схеме 30 управления шинами затворов. Выходной сигнал SRO5 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 45.
Схема 42a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI2 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS2 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра. Схема 42a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M2, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M2 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO5 из сдвигового регистра в сигнале M2 через свой контакт CK для сигнала синхронизации схема 42a D-триггера фиксирует состояние ввода сигнала CMI2 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 42a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня во втором кадре.
Затем ниже приведено описание изменений форм различных сигналов в третьей строке. Во время исходного состояния схема 43a D-триггера в CS-схеме 43 принимает сигнал CMI3 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS3, который схема 43a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO3 из сдвигового регистра, соответствующий стробирующему сигналу G3, который должен быть подан на шину 12 затворов в третьей строке, выводят из схемы SR3 сдвигового регистра и подают на один из контактов логической схемы 43b "ИЛИ" в CS-схеме 43. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 схема 43a D-триггера передает состояние ввода сигнала CMI3 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра. Затем схема 43a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO3 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI3 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 43a D-триггера сохраняет этот высокий уровень до тех пор, пока уровень сигнала M2 не повысится до высокого уровня.
Затем на другой контакт логической схемы 43b "ИЛИ" подают выходной сигнал SRO6 из сдвигового регистра, который был сдвинут в шестую строку в схеме 30 управления шинами затворов. Следует отметить, что выходной сигнал SRO6 из сдвигового регистра также подают на один из контактов логической схемы 45b "ИЛИ" в CS-схеме 46.
Схема 43a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI3 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. То есть, электрический потенциал CS-сигнала CS3 переключается с высокого уровня на низкий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра. Схема 43a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M3, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M3 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO6 из сдвигового регистра в сигнале M3 через свой контакт CK для сигнала синхронизации схема 43a D-триггера фиксирует состояние ввода сигнала CMI3 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 43a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M3 не повысится до высокого уровня во втором кадре.
Затем ниже приведено описание изменений форм различных сигналов в четвертой строке. Во время исходного состояния схема 44a D-триггера в CS-схеме 44 принимает сигнал CMI1 полярности через свой контакт D и принимает сигнал сброса "RESET" через свой контакт CL для сигнала сброса. Сигнал сброса "RESET" вызывает то, что электрический потенциал CS-сигнала CS4, который схема 44a D-триггера выводит через свой выходной контакт Q, сохраняется на низком уровне.
После этого выходной сигнал SRO4 из сдвигового регистра в четвертой строке выводят из схемы SR4 сдвигового регистра и подают на один из контактов логической схемы 44b "ИЛИ" в CS-схеме 44. Затем изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 подают на контакт CK для сигнала синхронизации. После приема изменившегося уровня электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 схема 44a D-триггера передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает низкий уровень. Затем схема 44a D-триггера выводит этот низкий уровень до тех пор, пока не произойдет следующее изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO4 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует низкий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня.
Затем на другой контакт логической схемы 44b "ИЛИ" подают выходной сигнал SRO7 из сдвигового регистра, который был сдвинут в седьмую строку в схеме 30 управления шинами затворов. Следует отметить, что выходной сигнал SRO7 из сдвигового регистра также подают на один из контактов логической схемы 47b "ИЛИ" в CS-схеме 47.
Схема 44a D-триггера принимает изменившийся уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO7 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации и передает состояние ввода сигнала CMI1 полярности, принятого ею через ее контакт D в этот момент времени, то есть передает высокий уровень. То есть, электрический потенциал CS-сигнала CS4 переключается с низкого уровня на высокий уровень в тот момент, когда изменяется уровень (с низкого на высокий) электрического потенциала выходного сигнала SRO7 из сдвигового регистра. Схема 44a D-триггера выводит этот высокий уровень до тех пор, пока не произойдет изменение уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO7 из сдвигового регистра в сигнале M4, который подают на контакт CK для сигнала синхронизации (то есть, в течение промежутка времени, когда уровень сигнала M4 является высоким). Затем после приема изменившегося уровня (с высокого на низкий) электрического потенциала выходного сигнала SRO7 из сдвигового регистра в сигнале M4 через свой контакт CK для сигнала синхронизации схема 44a D-триггера фиксирует состояние ввода сигнала CMI1 полярности, принятого ею в этот момент времени, то есть фиксирует высокий уровень. После этого схема 44a D-триггера сохраняет этот низкий уровень до тех пор, пока уровень сигнала M4 не повысится до высокого уровня во втором кадре.
Описанные выше операции (i) в строках с первой по третью вызывают понижение электрических потенциалов CS-сигналов после понижения уровней стробирующих сигналов в этих строках в те моменты времени, когда стробирующие сигналы в соответствующих им строках понижаются (то есть, в те моменты времени, когда тонкопленочные транзисторы (TFT) 13 переключаются из состояния "включено" в состояние "выключено"), и (ii) в строках с четвертой по шестую вызывают повышение электрических потенциалов CS-сигналов после понижения уровней стробирующих сигналов в этих строках в те моменты времени, когда стробирующие сигналы в соответствующих им строках понижаются (то есть, в те моменты времени, когда тонкопленочные транзисторы (TFT) 13 переключаются из состояния "включено" в состояние "выключено") (см. чертежи Фиг. 49 и Фиг. 50).
Как было описано выше, согласно тринадцатому примеру, даже в той конфигурации, в которой CS-схема 4n в строке номер n принимает выходной сигнал SROn из сдвигового регистра в соответствующей строке номер n и выходной сигнал из сдвигового регистра SROn+a в более поздней строке (строка номер (n+3) в вышеупомянутом примере), чем следующая строка (строка номер (n+1)), управление с инверсией n строк (nH) (в вышеописанном примере - управление с инверсией трех строк (3H)) может быть осуществлено путем регулирования привязок по времени, в которые сигналы CMI1, CMI2 и CMI3 полярности изменяют свои полярности на обратные.
В приведенном ниже описании рассмотрено то, как сигналы CMI1, CMI2 и CMI3 полярности, подаваемые в CS-схемы 4n, связаны с выходными сигналами SROn из сдвиговых регистров. На чертеже Фиг. 51 показаны соотношения между (i) сигналом полярности (любым из сигналов CMI1, CMI2 и CMI3) и выходными сигналами SROn из сдвиговых регистров, которые вводят в CS-схемы 4n, и (ii) CS-сигналами, которые выводят из CS-схем 4n.
Что касается сигнала CMI1, показанного на чертеже Фиг. 51, то каждый из знаков с A по L соответствует одному периоду строчной развертки и указывает полярность (положительную полярность или отрицательную полярность) в течение этого периода строчной развертки. Например, сигнал CMI1 имеет положительную полярность в течение первого периода "A" строчной развертки, имеет положительную полярность в течение второго периода "B" строчной развертки, имеет положительную полярность в течение третьего периода "C" строчной развертки и имеет отрицательную полярность в течение четвертого периода "D" строчной развертки. Что касается сигнала CMI2, то каждый из знаков с 1 по 12 соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI2 имеет отрицательную полярность в течение первого периода "1" строчной развертки, имеет положительную полярность в течение второго периода "2" строчной развертки, имеет положительную полярность в течение третьего периода "3" строчной развертки и имеет положительную полярность в течение четвертого периода "4" строчной развертки. Что касается сигнала CMI3, то каждый из знаков с a по l соответствует одному периоду строчной развертки и указывает полярность в течение этого периода строчной развертки. Например, сигнал CMI3 имеет отрицательную полярность в течение первого периода "a" строчной развертки, имеет отрицательную полярность в течение второго периода "b" строчной развертки, имеет положительную полярность в течение третьего периода "c" строчной развертки и имеет положительную полярность в течение четвертого периода "d" строчной развертки. Таким образом, сигналы CMI1, CMI2, и CMI3 инвертируют свои полярности через каждые три периода строчной развертки, и сигналы CMI1 и CMI2 имеют сдвиг по фазе один относительно другого на один период строчной развертки, при этом сигналы CMI2 и CMI3 имеют сдвиг по фазе один относительно другого на один период строчной развертки. Кроме того, каждая из CS-схем регулярно принимает один из сигналов CMI1, CMI2 и CMI3 полярности (CS-схема 41 принимает сигнал CMI1, CS-схема 42 принимает сигнал CMI2, CS-схема 43 принимает сигнал CMI3, CS-схема 44 принимает сигнал CMI1, CS-схема 45 принимает сигнал CMI2 и CS-схема 46 принимает сигнал CMI3).
CS-схема 4n принимает через свой контакт CK для сигнала синхронизации выходной сигнал SROn из сдвигового регистра в строке номер n и выходной сигнал SROn+3 из сдвигового регистра в следующей строке номер (n+3). Это вызывает то, что CS-схема 4n фиксирует (i) сигнал CMI, который CS-схема 4n принимает через свой контакт D для ввода данных в течение n-го периода строчной развертки, и (ii) сигнал CMI, который CS-схема 4n принимает через ее контакт D для ввода данных в течение (n+3)-го периода строчной развертки. Например, CS-схема 41 устанавливает положительную полярность "A" сигнала CMI1 в течение первого периода строчной развертки и устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки. CS-схема 42 устанавливает положительную полярность "2" сигнала CMI2 в течение второго периода строчной развертки и устанавливает отрицательную полярность "5" сигнала CMI2 в течение пятого периода строчной развертки. CS-схема 43 устанавливает положительную полярность "c" сигнала CMI3 в течение третьего периода строчной развертки и устанавливает отрицательную полярность "f" сигнала CMI3 в течение шестого периода строчной развертки. CS-схема 44 устанавливает отрицательную полярность "D" сигнала CMI1 в течение четвертого периода строчной развертки и устанавливает положительную полярность "G" сигнала CMI1 в течение седьмого периода строчной развертки. Таким образом, на выходе получают CS-сигналы CSn, показанные на чертежах Фиг. 48 и Фиг. 50.
Как было описано в тринадцатом примере, управление с инверсией трех строк (3H) может быть реализовано с использованием множества сигналов CMI1, CMI2 и CMI3 полярности, которые отличаются друг от друга по частоте. Аналогичным образом, управление с инверсией четырех строк (4H),..., n строк (nH) может быть реализовано путем изменения частоты и количества сигналов полярности. Например, управление с инверсией четырех строк (4H) может быть реализовано (i) с использованием четырех сигналов CMI1-CMI4 полярности, (ii) путем задания такой частоты каждого из сигналов полярности, чтобы сигналы полярности изменяли свои полярности на обратные через каждые четыре строки (4H), и (iii) путем последовательной подачи сигналов полярности в CS-схемы. Это позволяет реализовать управление отображением с увеличением размера в два раза и управление отображением с увеличением размера в три раза. Аналогичным образом, управление отображением с увеличением размера в четыре раза,..., с увеличением размера в n раз может быть реализовано путем регулирования тех привязок по времени, в которые сигналы CMI1 и CMI2 полярности изменяют свои полярности на обратные.
Схема 30 управления шинами затворов в жидкокристаллическом устройстве отображения согласно настоящему изобретению может быть сконфигурирована так, как показано на чертеже Фиг. 52. На чертеже Фиг. 53 изображена блок-схема, на которой показана конфигурация жидкокристаллического устройства отображения, включающего в себя эту схему 30 управления шинами затворов. На чертеже Фиг. 54 изображена блок-схема, на которой показана конфигурация схемы 301 сдвигового регистра, входящей в состав этой схемы 30 управления шинами затворов. Схема сдвигового регистра 301 в каждом каскаде включает в себя триггер RS-FF и переключающие схемы SW1 и SW2. На чертеже Фиг. 55 изображена принципиальная электрическая схема, на которой показана конфигурация триггера RS-FF.
Как показано на чертеже Фиг. 55, триггер RS-FF содержит: P-канальный транзистор p2 и N-канальный транзистор n3, которые образуют схему на комплементарных МОП-транзисторах (транзисторах со структурой "металл-оксид-полупроводник"); P-канальный транзистор p1 и N-канальный транзистор n1, которые образуют схему на комплементарных МОП-транзисторах; P-канальный транзистор p3; N-канальный транзистор n2; N-канальный транзистор 4; контакт SB; контакт RB; контакт INIT; контакт Q и контакт QB. В триггере RS-FF затвор транзистора p2, затвор транзистора n3, сток транзистора p1, сток транзистора n1 и контакт QB соединены друг с другом; сток транзистора p2, сток транзистора n3, сток транзистора p3, затвор транзистора p1, затвор транзистора n1 и контакт Q соединены друг с другом; исток транзистора n3 соединен со стоком транзистора n2; контакт SB соединен с затвором транзистора p3 и с затвором транзистора n2; контакт RB соединен с истоком транзистора p3, с истоком транзистора p2 и с затвором транзистора n4; исток транзистора n1 и сток транзистора n4 соединены друг с другом; контакт INIT соединен с истоком транзистора n4; исток транзистора p1 соединен с VDD; а исток транзистора n2 соединен с VSS. Здесь следует отметить, что транзисторы p2, n3, p1 и n1 образуют схему LC триггера; транзистор p3 функционирует в качестве задающего транзистора ST; а каждый из транзисторов n2 и n4 функционирует в качестве транзистора LRT, освобождающего триггер.
На чертеже Фиг. 56 изображена временная диаграмма, на которой показано то, как работает триггер RS-FF. Например, на чертеже Фиг. 56 в момент времени t1 на контакт Q с контакта RB подают Vdd, включая тем самым транзистор n1, а на контакт QB подают сигнал INIT (низкий уровень). В момент времени t2 уровень сигнала SB становится высоким и транзистор p3 выключается, а транзистор n2 включается, в силу чего сохраняется состояние в момент времент t1. В момент времени t3 уровень сигнала RB становится низким, тем самым включается транзистор p1 и на контакт QB подается Vdd (высокий уровень).
Как показано на чертеже Фиг. 54, контакт QB триггера RS-FF соединен с затвором переключающей схемы SW1, который находится на стороне N-канала, и с затвором переключающей схемы SW2, который находится на стороне P-канала. Проводящий электрод переключающей схемы SW1 соединен с VDD. Другой проводящий электрод переключающей схемы SW1 соединен с контактом OUTB, служащим в качестве выходного контакта в этом каскаде, и с проводящим электродом переключающей схемы SW2. Другой проводящий электрод переключающей схемы SW2 соединен с контактом CKB для приема сигнала синхронизации.
Согласно схеме 301 сдвигового регистра, когда уровень сигнала QB из триггера FF является низким, переключающая схема SW2 находится в состоянии "выключено" (ВЫКЛ), а переключающая схема SW1 находится в состоянии "включено" (ВКЛ), в силу чего уровень сигнала OUTB становится высоким. Когда уровень сигнала QB является высоким, переключающая схема SW2 включается (ВКЛ), а переключающая схема SW1 выключается (ВЫКЛ), в силу чего сигнал CKB загружается и выводится с контакта OUTB.
Согласно схеме 301 сдвигового регистра контакт OUTB текущего каскада соединен с контактом SB следующего каскада, а контакт OUTB следующего каскада соединен с контактом RB текущего каскада. Например, контакт OUTB схемы SRn сдвигового регистра в каскаде номер n соединен с контактом SB схемы сдвигового регистра SRn+1 в каскаде номер (n+1), а контакт OUTB схемы сдвигового регистра SRn+1 в каскаде номер (n+1) соединен с контактом RB схемы SRn сдвигового регистра в каскаде номер n. Следует отметить, что схема SR сдвигового регистра в первом каскаде, то есть схема SR1 сдвигового регистра, принимает сигнал GSPB через свой контакт SB. Кроме того, в устройстве GD управления затворами контакты CKB в нечетных каскадах и контакты CKB в четных каскадах соединены с различными шинами GCK (шинами, по которым подают импульсы GCK), а контакты INIT в соответствующих каскадах соединены с одной и той же шиной INIT (шиной, по которой подают сигнал INIT). Например, контакт CKB схемы SRn сдвигового регистра в каскаде номер n соединен с шиной GCK2, контакт CKB схемы SRn+1 сдвигового регистра в каскаде номер (n+1) соединен с шиной GCK1, а контакт INIT схемы SRn сдвигового регистра в каскаде номер n и контакт INIT схемы SRn+1 сдвигового регистра в каскаде номер (n+1) соединены с одной и той же сигнальной шиной INIT.
Схема управления отображением согласно настоящему изобретению представляет собой схему управления отображением для использования в устройстве отображения, (i) которое выполняет отображение на основании видеосигнала, разрешающая способность которого была преобразована в более высокую разрешающую способность, и (ii) в котором путем подачи сигналов проводника конденсаторов удержания, которые подают на проводники конденсаторов удержания, образующих конденсаторы с электродами пикселей, содержащимися в пикселях, потенциалы сигналов, записанные в электроды пикселей с шин сигнала передачи данных, изменяют в направлении, соответствующем полярностям потенциалов сигналов, при этом предполагают, что направлением, в котором продолжаются шины сигнала развертки, является направление вдоль строк, когда разрешающая способность видеосигнала преобразована с коэффициентом n (где n - целое число, равное двум или большее чем два), по меньшей мере, в направлении вдоль столбцов, причем на электроды пикселей, содержащиеся в соответствующих n пикселях, которые соответствуют n смежным шинам сигнала развертки и которые являются смежными друг с другом в направлении вдоль столбцов, подают потенциалы сигналов, имеющие одинаковую полярность и одинаковый уровень серого, а направление изменения потенциалов сигналов, записанных в электроды пикселей с шин сигнала передачи данных, изменяется через каждые n смежных строк в соответствии с полярностями потенциалов сигналов.
Согласно этой схеме управления отображением сигналы проводника конденсаторов удержания изменяют потенциалы сигнала, записанные в электроды пикселей, в направлении, соответствующем полярностям потенциалов сигналов. Это обеспечивает реализацию ЗС-управления. Кроме того, согласно этой схеме управления отображением отображение выполняют на основании видеосигнала, разрешающая способность которого была преобразована с коэффициентом n (где n - целое число, равное двум или большее чем два), по меньшей мере, в направлении вдоль столбцов. Это обеспечивает реализацию управления с преобразованием, обеспечивающим высокую разрешающую способность (управление отображением с увеличением размера в n раз).
Кроме того, согласно этой конфигурации направление изменения потенциалов сигналов, записанных в электроды пикселей с шин сигнала передачи данных, изменяется через каждые n смежных строк в соответствии с полярностями потенциалов сигналов. Например, в случае выполнения отображения на основании видеосигнала, разрешающая способность которого была преобразована с коэффициентом 2 (управление отображением с увеличением размера в два раза) в обоих направлениях: в направлении вдоль столбцов и в направлении вдоль строк, направление изменения потенциалов сигналов, записанных в электроды пикселей, изменяется через каждые две смежные строки. Это устраняет возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения (см. Фиг. 64). Соответственно, можно устранить возникновение чередующихся ярких и темных поперечных полос в изображении, выводимом на экран устройства отображения, когда устройство отображения, в котором используется ЗС-управление, осуществляет управление с преобразованием, обеспечивающим высокую разрешающую способность (управление отображением с увеличением размера в n раз), и таким образом можно улучшить качество отображения в устройстве отображения.
Схема управления отображением может представлять собой схему управления отображением, которая включает в себя сдвиговый регистр, включающий в себя множество каскадов, созданных таким образом, что они соответствуют множеству соответствующих шин сигнала развертки, причем эта схема управления отображением содержит удерживающие цепи, созданные таким образом, что они поочередно соответствуют соответствующим каскадам сдвигового регистра, при этом в каждую из удерживающих цепей вводят целевой сигнал удержания, выходной сигнал из текущего каскада и выходной сигнал из последующего каскада, который следует после текущего каскада, вводят в логическую схему, соответствующую текущему каскаду, когда выходной сигнал из логической схемы становится активным, то удерживающая цепь, соответствующая текущему каскаду, загружает и удерживает целевой сигнал удержания, при этом выходной сигнал из текущего каскада подают на шину сигнала развертки, соединенную с пикселями, соответствующими текущему каскаду, а выходной сигнал из удерживающей цепи, соответствующей текущему каскаду, подают в качестве сигнала проводника конденсаторов удержания на проводники конденсаторов удержания, которые образуют конденсаторы с электродами пикселей, соответствующих текущему каскаду, а целевой сигнал удержания, который вводят во множество удерживающих цепей, и целевой сигнал удержания, который вводят в другое множество удерживающих цепей, отличаются по фазе друг от друга.
Схема управления отображением может представлять собой схему управления отображением, которая включает в себя сдвиговый регистр, включающий в себя множество каскадов, созданных таким образом, что они соответствуют множеству соответствующих шин сигнала развертки, причем эта схема управления отображением содержит удерживающие цепи, созданные таким образом, что они поочередно соответствуют соответствующим каскадам сдвигового регистра, причем в каждую из удерживающих цепей вводят целевой сигнал удержания, выходной сигнал из текущего каскада и выходной сигнал из последующего каскада, который следует после следующего каскада, вводят в логическую схему, соответствующую текущему каскаду, когда выходной сигнал из логической схемы становится активным, то удерживающая цепь, соответствующая текущему каскаду, загружает и удерживает целевой сигнал удержания, и выходной сигнал из текущего каскада подают на шину сигнала развертки, соединенную с пикселями, соответствующими текущему каскаду, а выходной сигнал из удерживающей цепи, соответствующей текущему каскаду, подают в качестве сигнала проводника конденсаторов удержания на проводники конденсаторов удержания, которые образуют конденсаторы с электродами пикселей, соответствующих текущему каскаду.
Схема управления отображением может быть сконфигурирована так, что каждая из удерживающих цепей удерживает целевой сигнал удержания тогда, когда выходной сигнал из одного из множества каскадов в сдвиговом регистре становится активным, и тогда, когда выходной сигнал из другого одного из множества каскадов в сдвиговом регистре становится активным; и целевой сигнал удержания представляет собой сигнал, который изменяет свою полярность на обратную при заданной привязке по времени, и (i) полярность целевого сигнала удержания в тот момент времени, когда выходной сигнал, который выводят из текущего каскада и вводят в логическую схему, становится активным, и (ii) полярность целевого сигнала удержания в тот момент времени, когда выходной сигнал, который выводят из последующего каскада и вводят в логическую схему, становится активным, являются различными.
Схема управления отображением может быть сконфигурирована так, что из двух удерживающих цепей, которые осуществляют удержание в течение одного и того же периода строчной развертки, одна из этих двух удерживающих цепей принимает первый целевой сигнал удержания, а другая принимает второй целевой сигнал удержания.
Схема управления отображением может быть сконфигурирована так, что первый и второй целевые сигналы удержания изменяют свои полярности на обратные в соответственные разные привязки по времени.
Схема управления отображением может быть сконфигурирована так, что: удерживающая цепь, соответствующая текущему каскаду, включает в себя первую секцию ввода, через которую удерживающая цепь принимает выходной сигнал из текущего каскада сдвигового регистра, вторую секцию ввода, через которую удерживающая цепь принимает целевой сигнал удержания, и секцию вывода, через которую удерживающая цепь выводит сигнал проводника конденсаторов удержания на проводник конденсаторов удержания, соответствующему текущему каскаду; причем удерживающая цепь выводит в качестве первого электрического потенциала сигнала проводника конденсаторов удержания первый электрический потенциал целевого сигнала удержания, принятого удерживающей цепью через вторую секцию ввода тогда, когда выходной сигнал, принятый удерживающей цепью из текущего каскада через первую секцию ввода, стал активным; в течение того промежутка времени, в котором выходной сигнал, принятый удерживающей цепью из текущего каскада через первую секцию ввода, является активным, электрический потенциал сигнала проводника конденсаторов удержания изменяется в соответствии с изменением электрического потенциала целевого сигнала удержания, принятого удерживающей цепью через вторую секцию ввода; и удерживающая цепь выводит в качестве второго электрического потенциала сигнала проводника конденсаторов удержания второй электрический потенциал целевого сигнала удержания, принятого удерживающей цепью через вторую секцию ввода тогда, когда выходной сигнал, принятый удерживающей цепью из текущего каскада через первую секцию ввода, стал неактивным.
Схема управления отображением может быть сконфигурирована так, что в логическую схему, соответствующую m-му каскаду, подают выходной сигнал из m-го каскада сдвигового регистра и выходной сигнал из (m+n)-го каскада сдвигового регистра; и полярность целевого сигнала удержания, который подают в удерживающую m-ю цепь, изменяется на обратную через каждые n периодов строчной развертки.
Схема управления отображением может быть сконфигурирована так, что каждая из удерживающих цепей сформирована как схема D-триггера или как запоминающая схема.
Устройство отображения согласно настоящему изобретению включает в себя любую из вышеописанных схем управления отображением и панель отображения.
Способ управления отображением согласно настоящему изобретению представляет собой способ управления устройством отображения, (i) которое выполняет отображение на основании видеосигнала, разрешающая способность которого была преобразована в более высокую разрешающую способность, и (ii) в котором за счет подачи сигналов проводника конденсаторов удержания на проводники конденсаторов удержания, образующие конденсаторы с электродами пикселей, содержащимися в пикселях, потенциалы сигналов, записанные в электроды пикселей с шин сигнала передачи данных, изменяют в направлении, соответствующем полярностям потенциалов сигналов, при этом упомянутый способ включает в себя следующие операции: когда разрешающая способность видеосигнала преобразована с коэффициентом n (где n - целое число, равное двум или большее чем два), по меньшей мере, в направлении вдоль столбцов на электроды пикселей, содержащиеся в соответствующих n пикселях, которые соответствуют n смежным шинам сигнала развертки и которые являются смежными друг с другом в направлении вдоль столбцов, подают потенциалы сигналов, имеющие одинаковую полярность и одинаковый уровень серого, предполагая, что направлением, в котором продолжаются шины сигнала развертки, является направление вдоль строк; и вызывают изменение направления изменения потенциалов сигналов, записанных в электроды пикселей с шин сигнала передачи данных, через каждые n смежных строк в соответствии с полярностями потенциалов сигналов.
Способ управления отображением может вызывать те же самые эффекты, которые вызывает конфигурация схемы управления отображением.
Следует отметить следующее: желательно, чтобы устройством отображения согласно настоящему изобретению являлось жидкокристаллическое устройство отображения.
Настоящее изобретение не ограничено описанием приведенных выше вариантов его осуществления, но может быть видоизменено специалистом в данной области техники, не выходя за пределы объема формулы изобретения. Вариант осуществления изобретения, основанный на надлежащей комбинации технических средств, раскрытых в различных вариантах осуществления изобретения, не выходит за пределы объема техники, охваченного настоящим изобретением.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Настоящее изобретение может быть соответствующим образом применено, в особенности, для управления жидкокристаллическим устройством отображения с активной матрицей.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1 - Жидкокристаллическое устройство отображения (устройство отображения)
10 - Жидкокристаллическая панель отображения (панель отображения)
11 - Шина истоков (шина сигнала передачи данных)
12 - Шина затворов (шина сигнала развертки)
13 - Тонкопленочный транзистор (TFT) (переключающий элемент)
14 - Электрод пикселя
15 - CS-шина (проводник конденсаторов удержания)
20 - Схема управления шинами истоков (схема управления шинами сигнала передачи данных)
30 - Схема управления шинами затворов (схема управления шинами сигнала развертки)
40 - Схема управления CS-шинами (схема управления проводниками конденсаторов удержания)
4n - CS-схема
4na - Схема D-триггера (удерживающая цепь, схема управления проводниками конденсаторов удержания)
4nb - Логическая схема "ИЛИ" (логическая схема)
50 - Управляющая схема
SR - Схема сдвигового регистра
CMI - Сигнал полярности (целевой сигнал удержания)
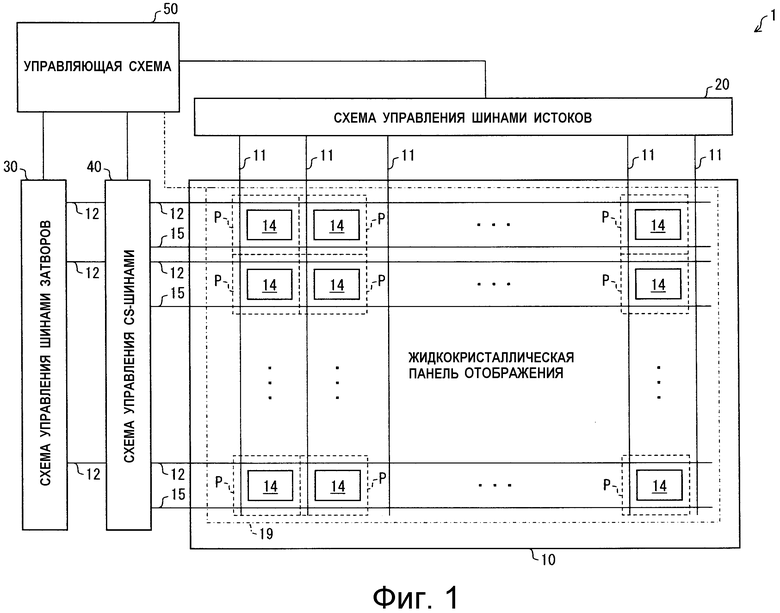
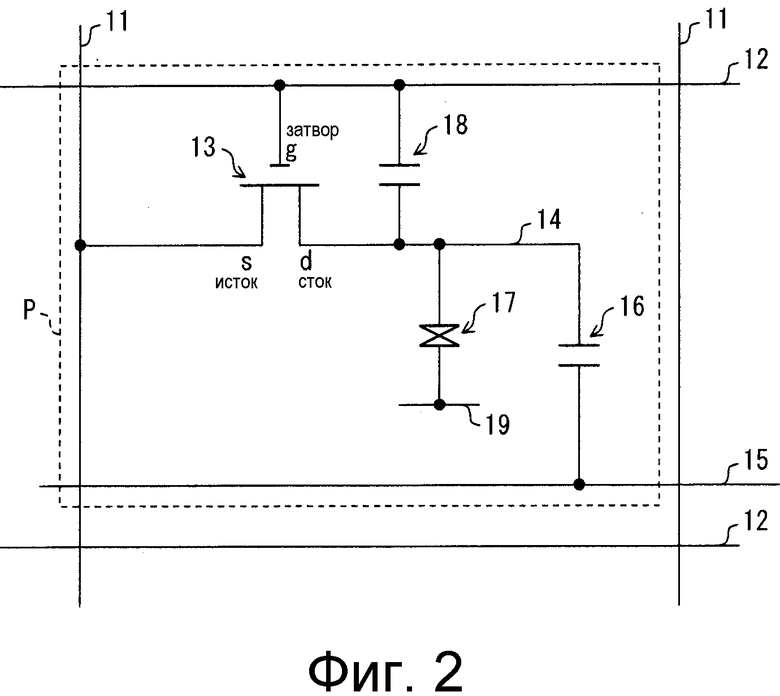
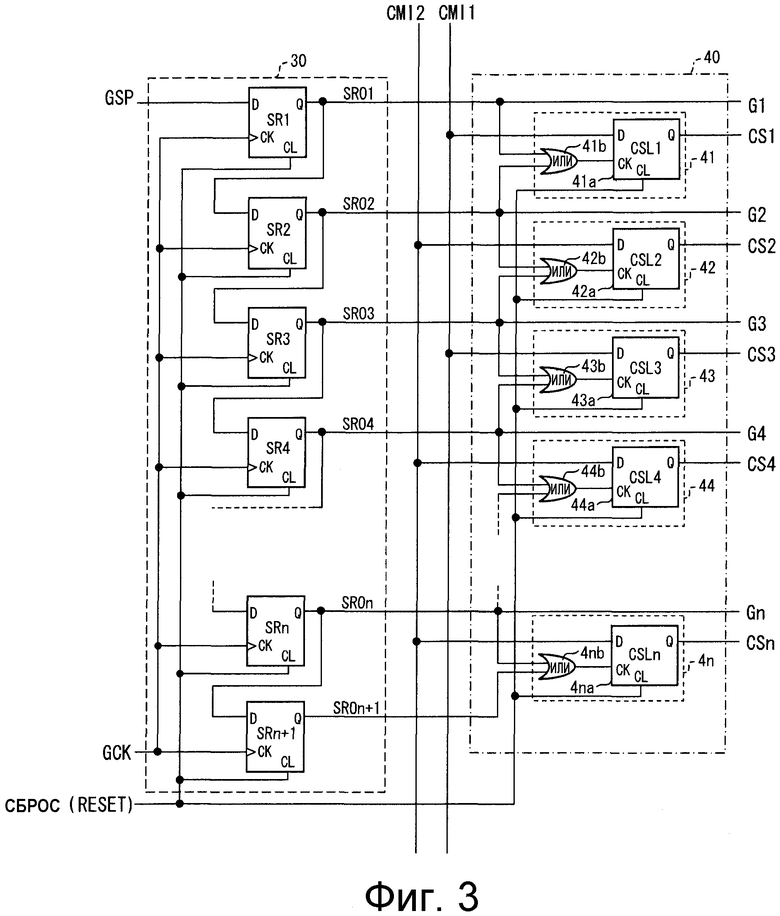
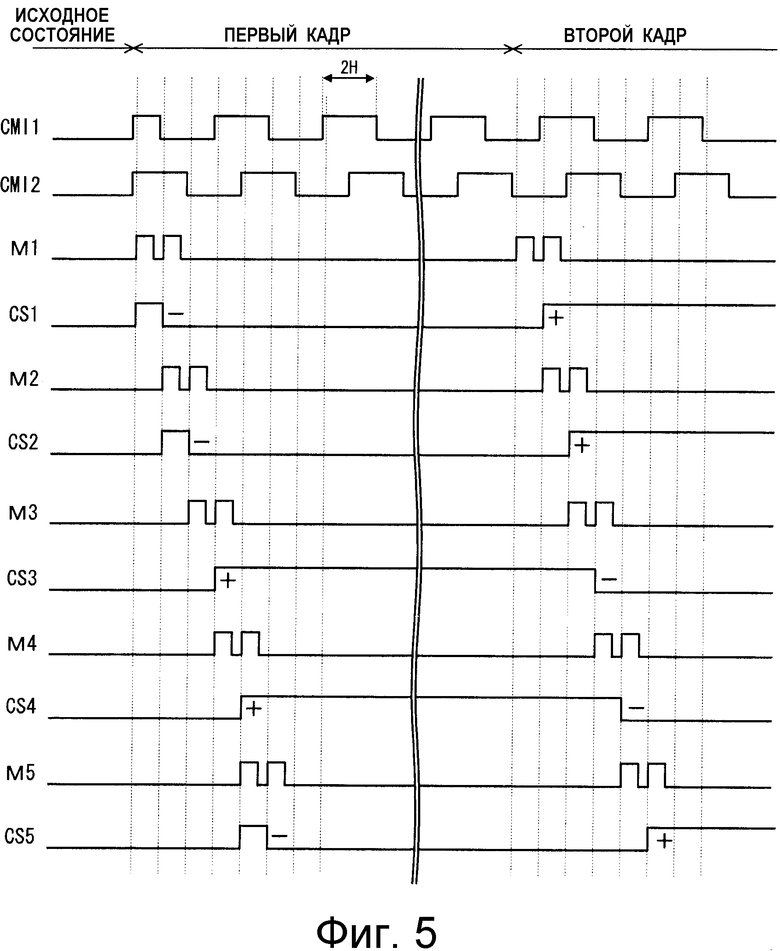
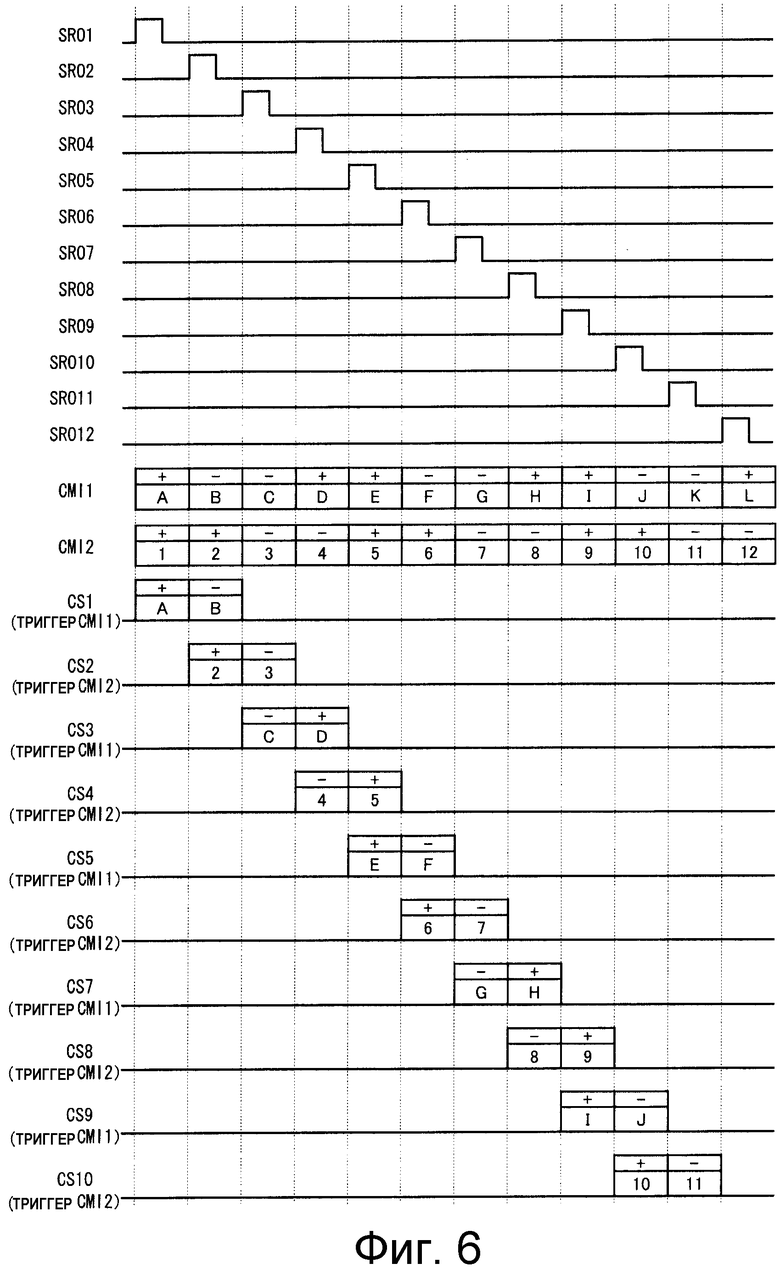
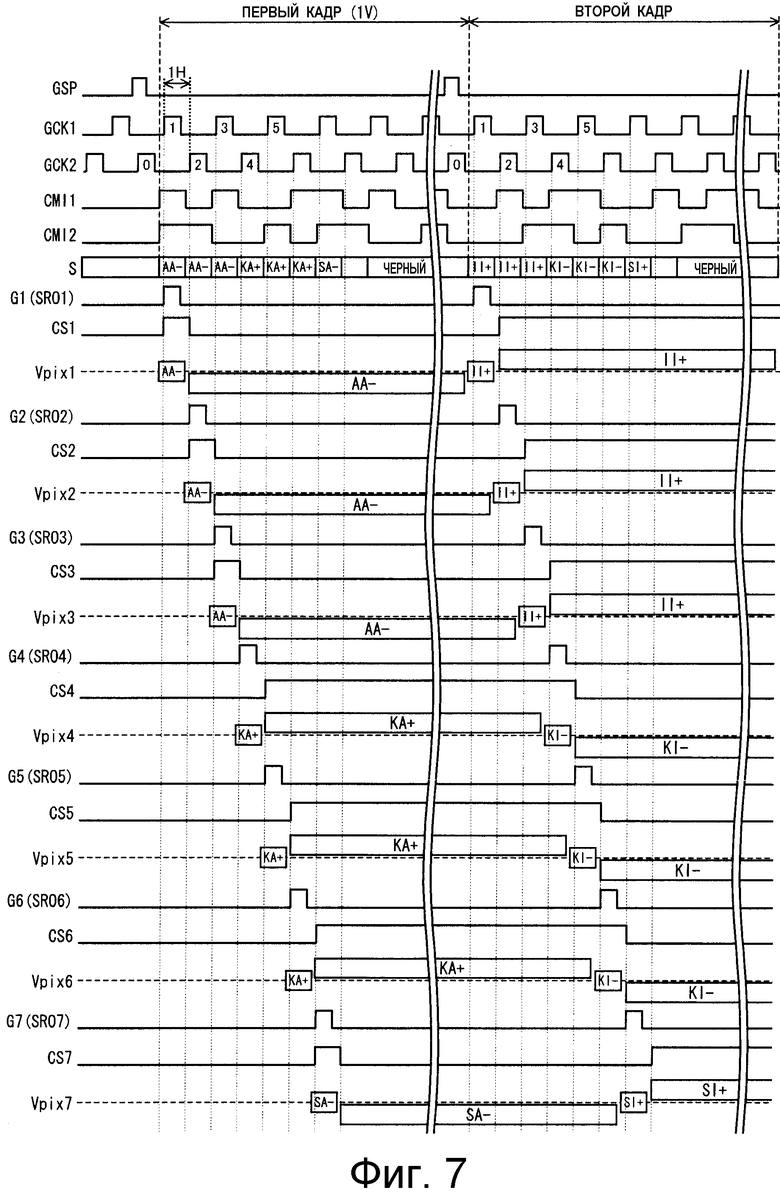
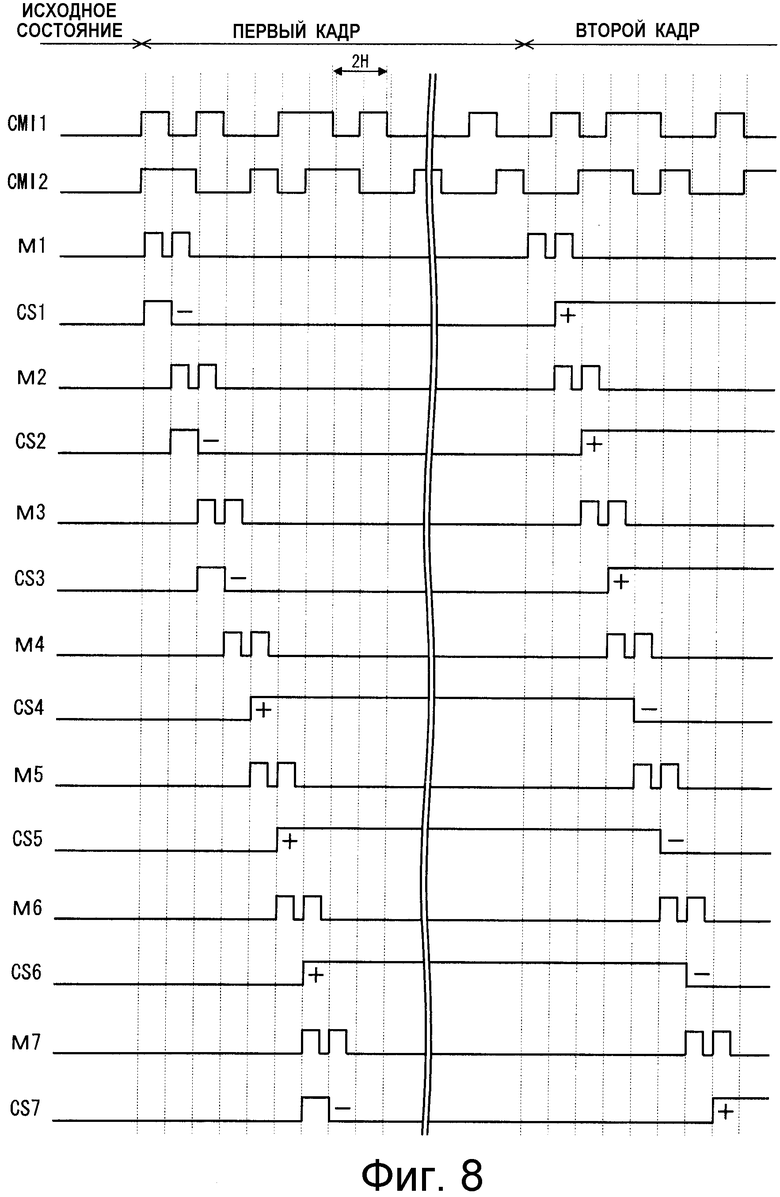
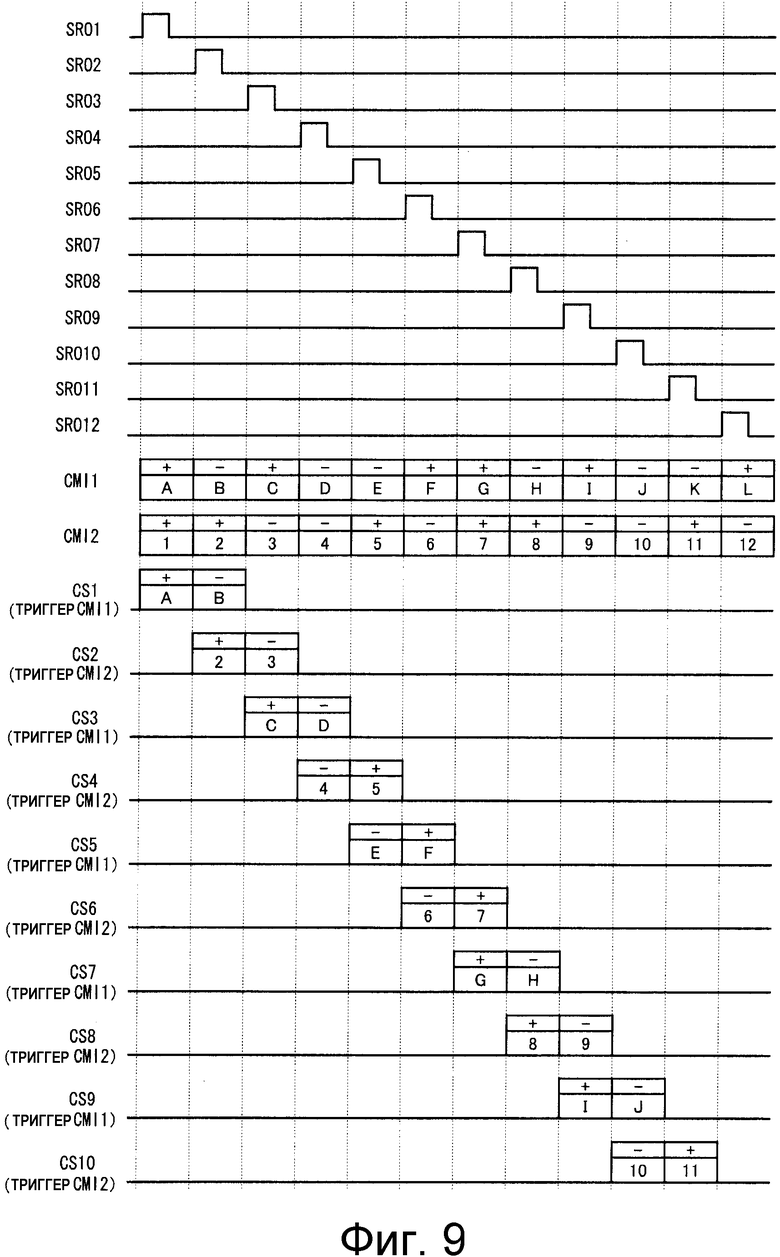
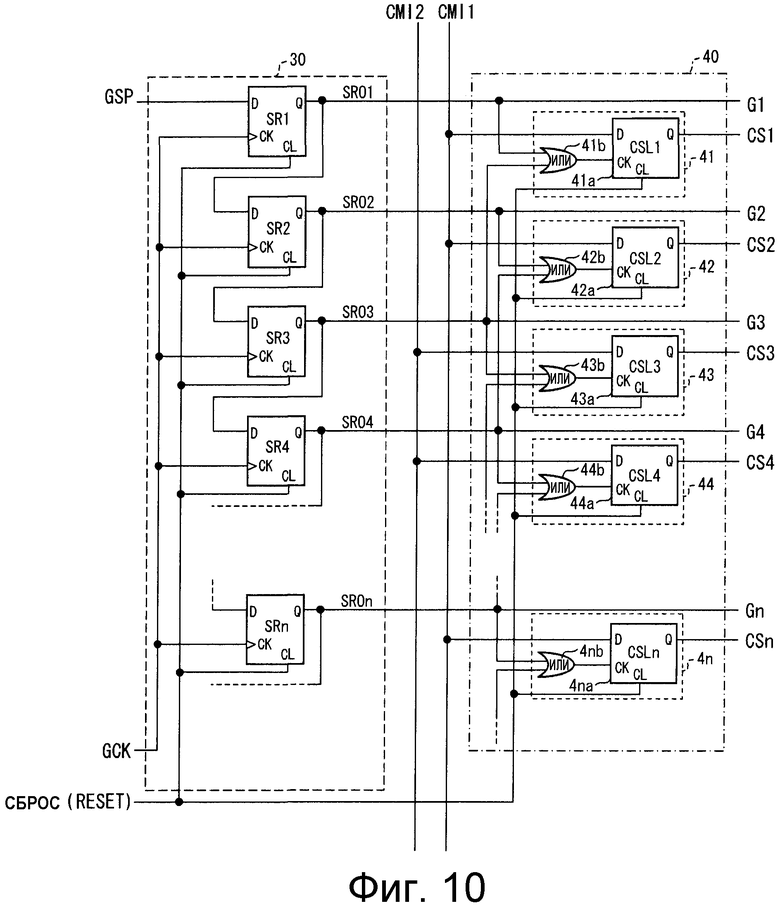
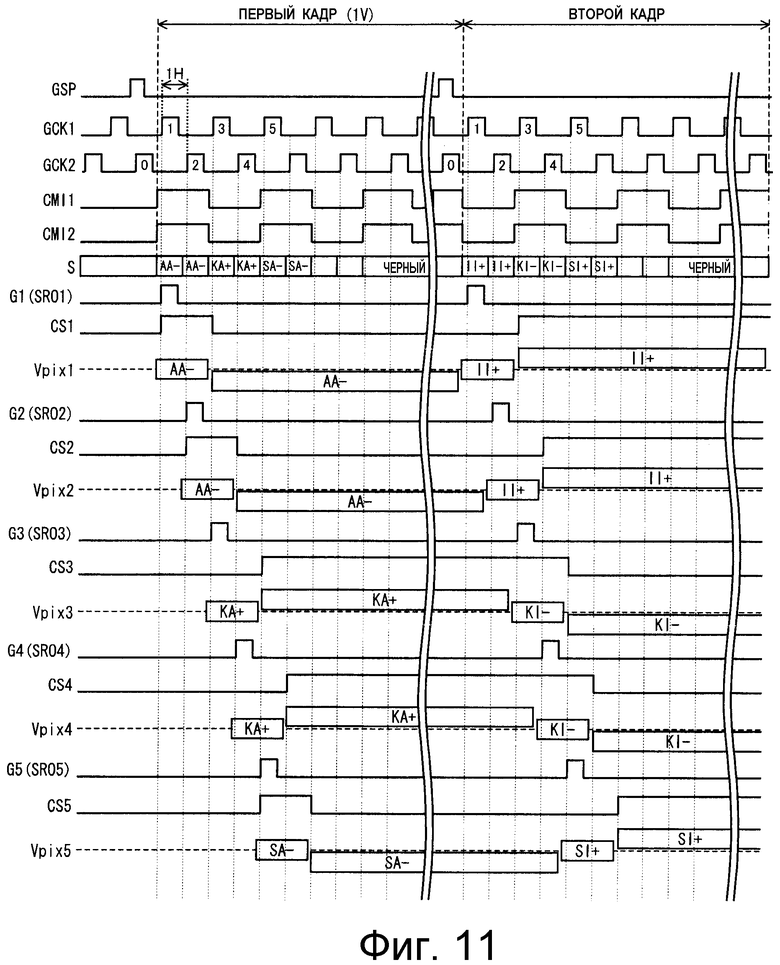
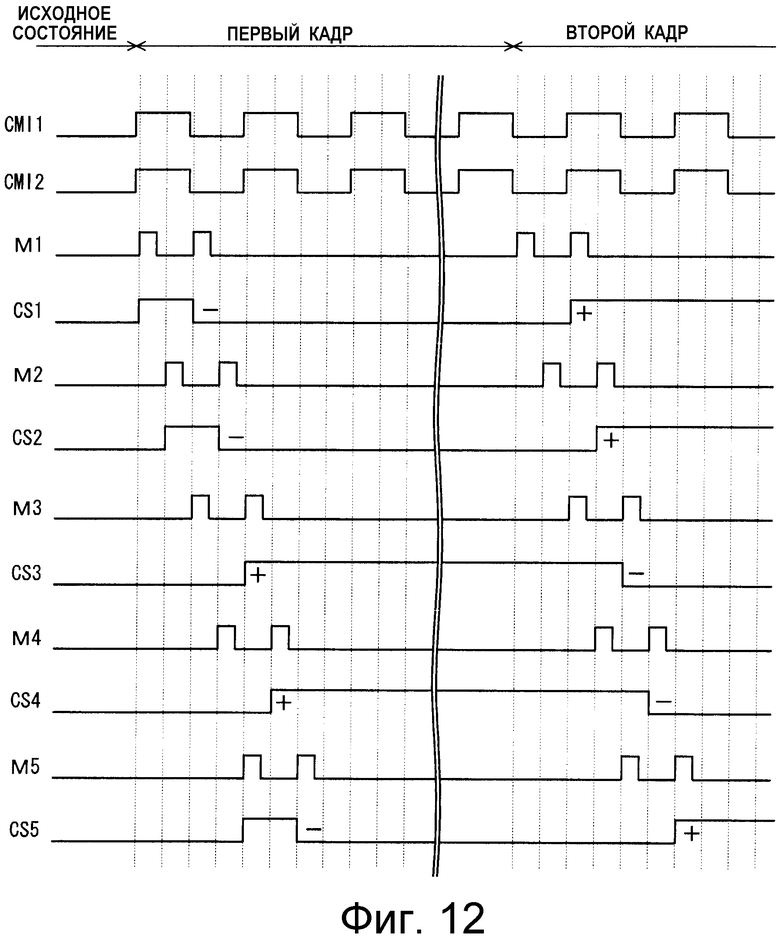
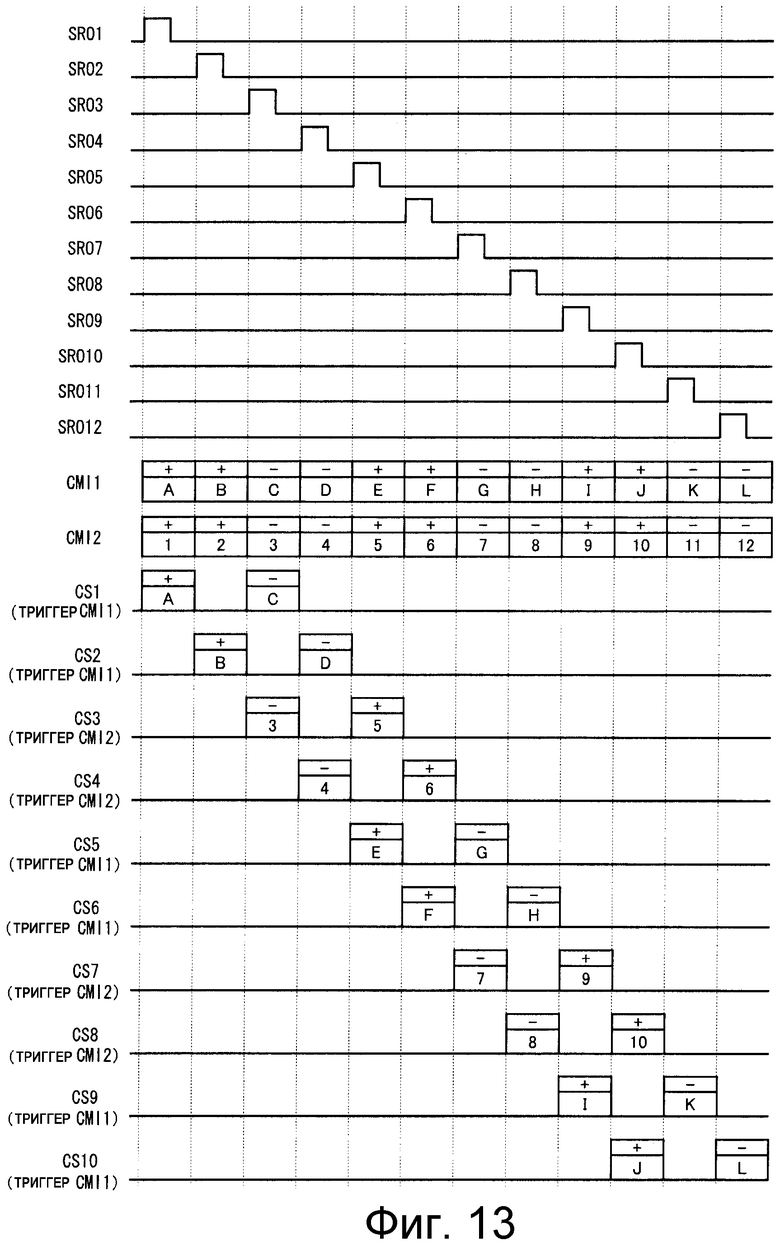
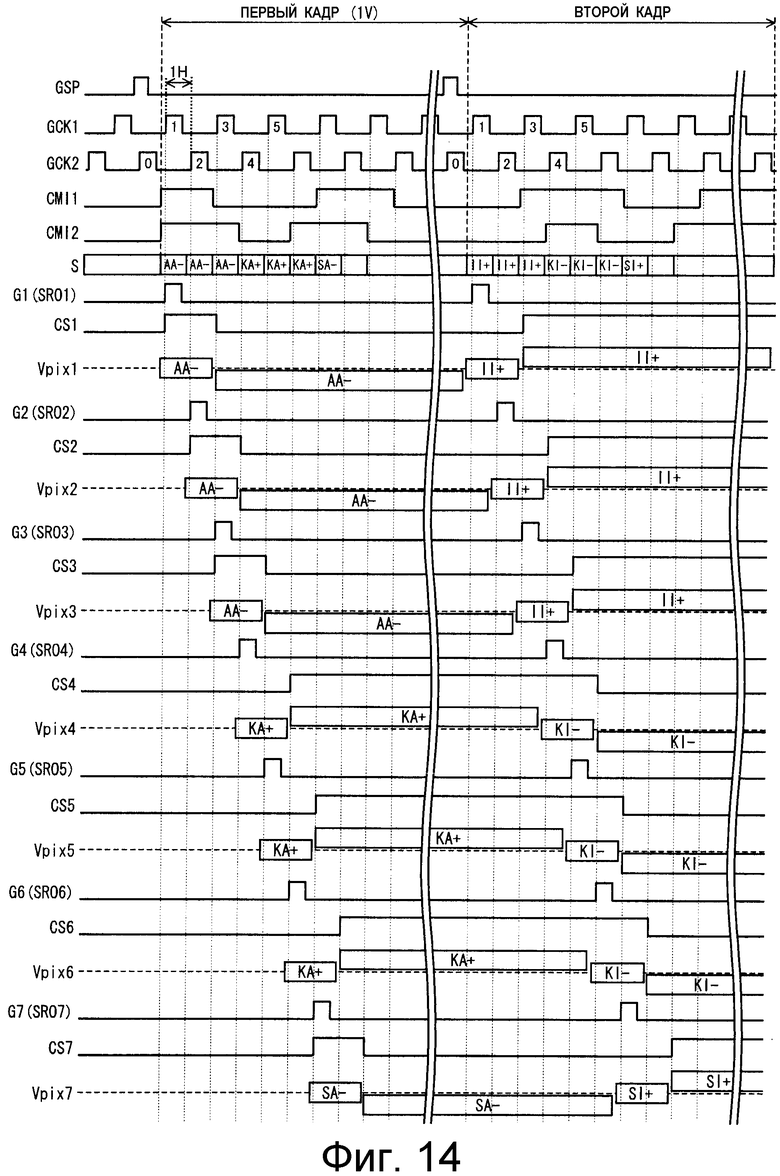
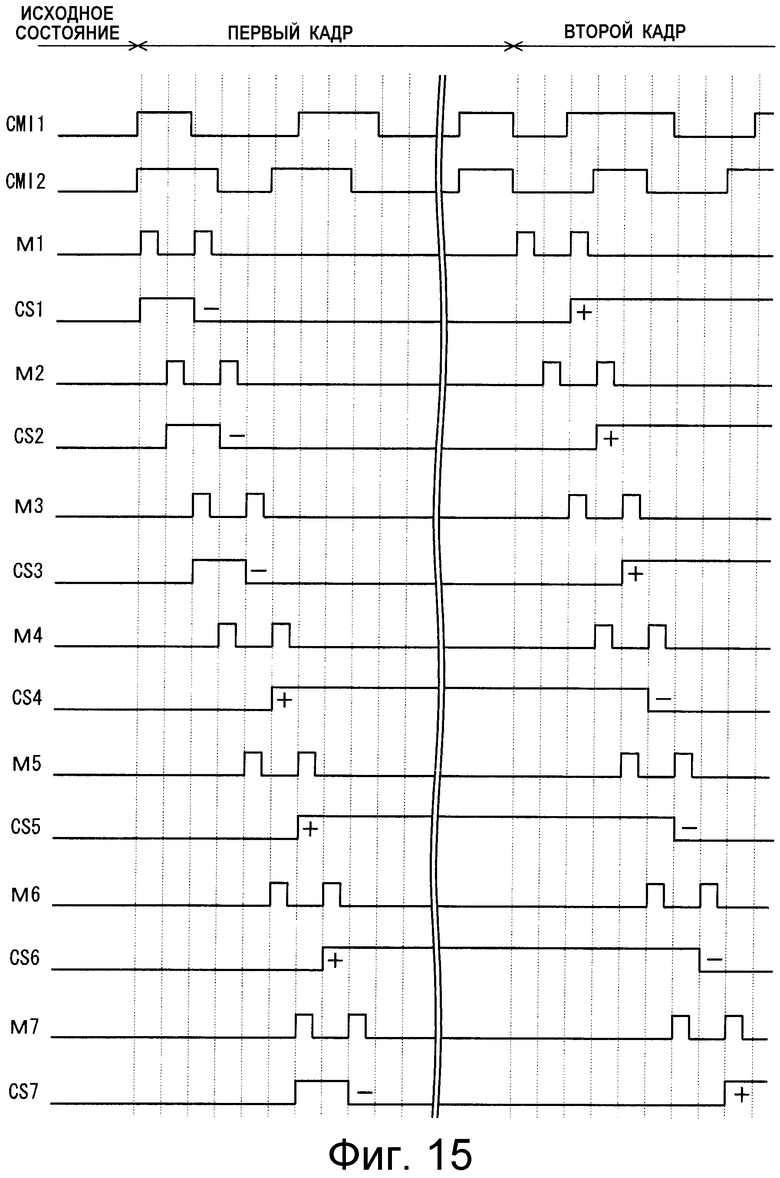
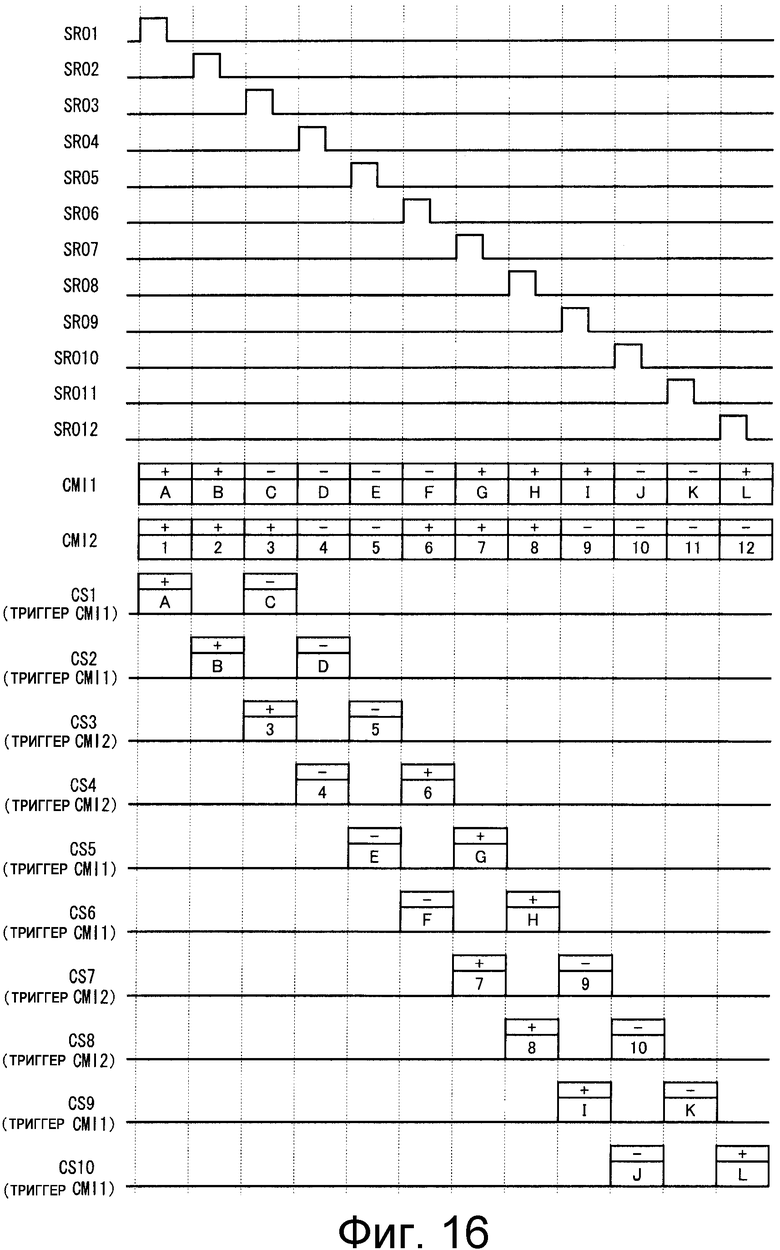
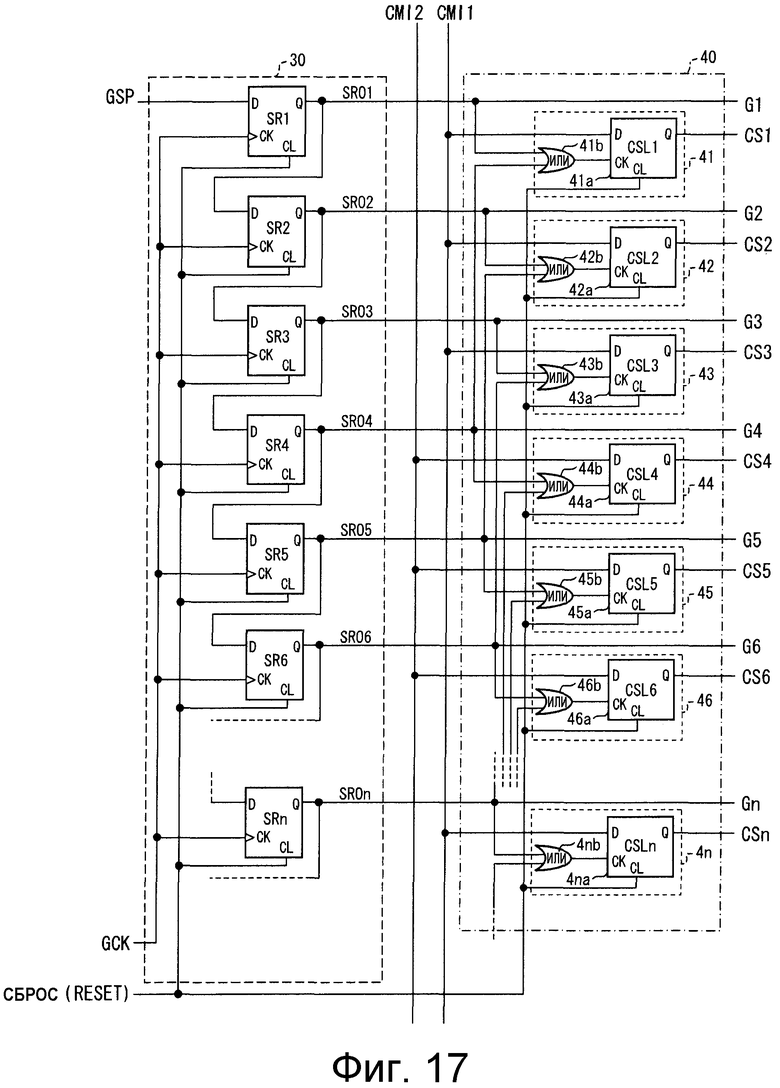
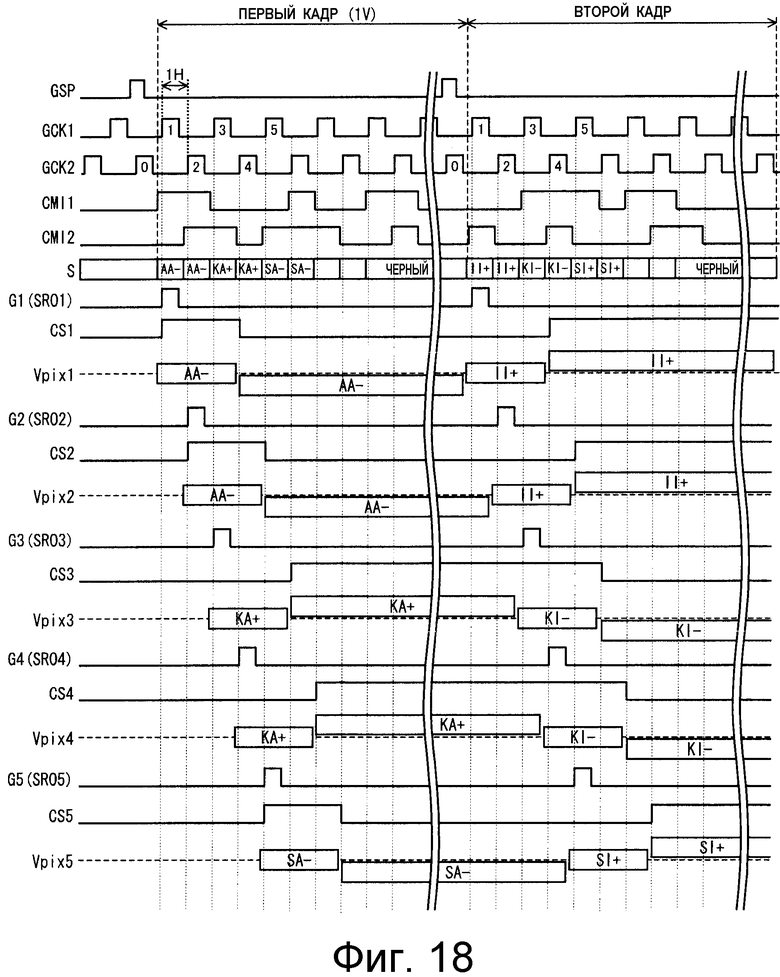
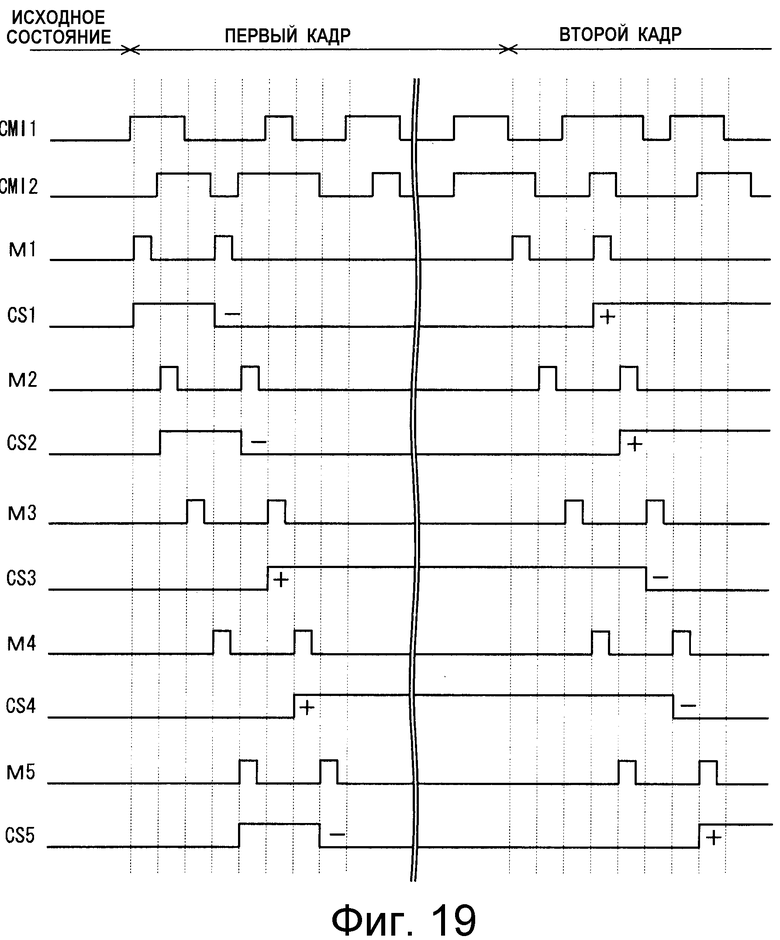
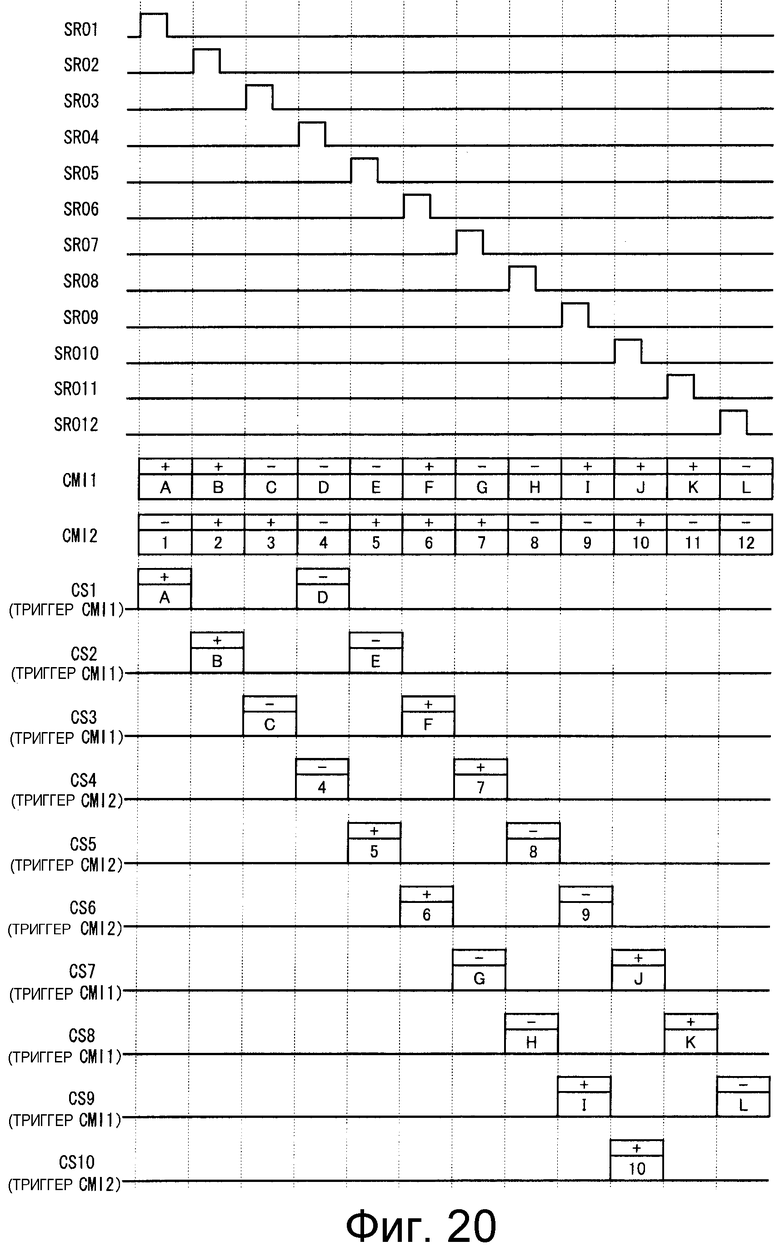
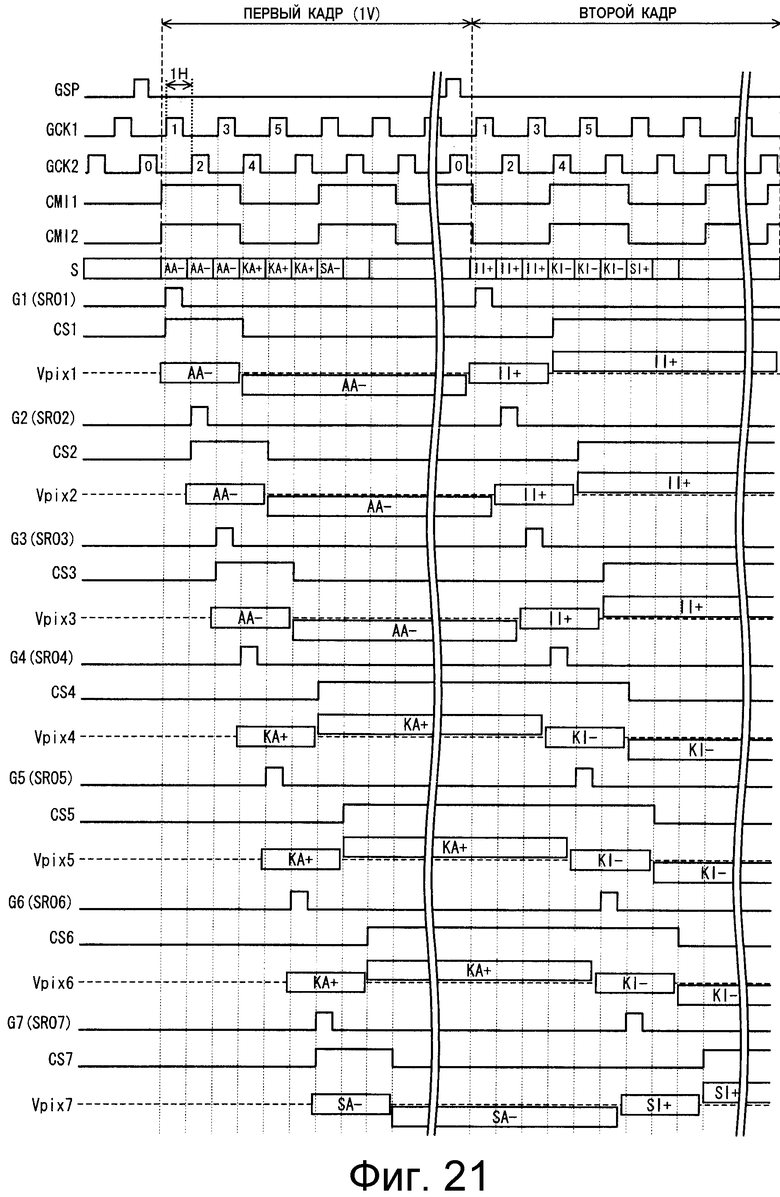
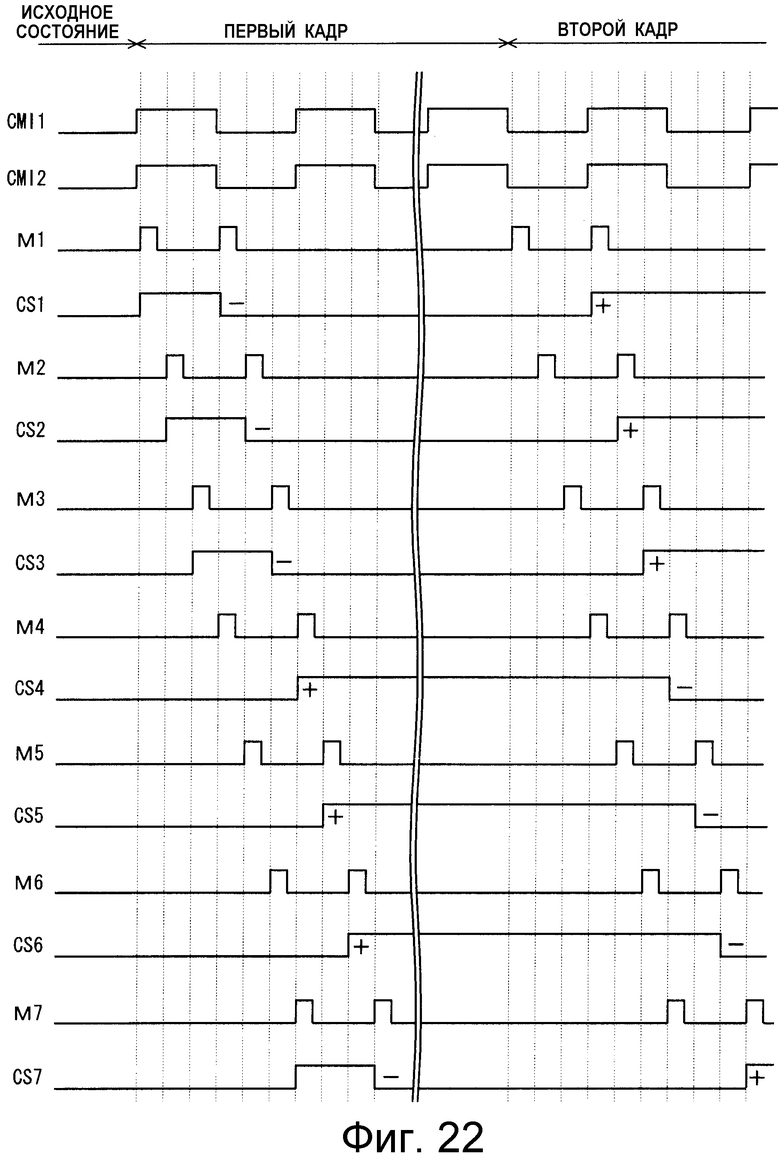
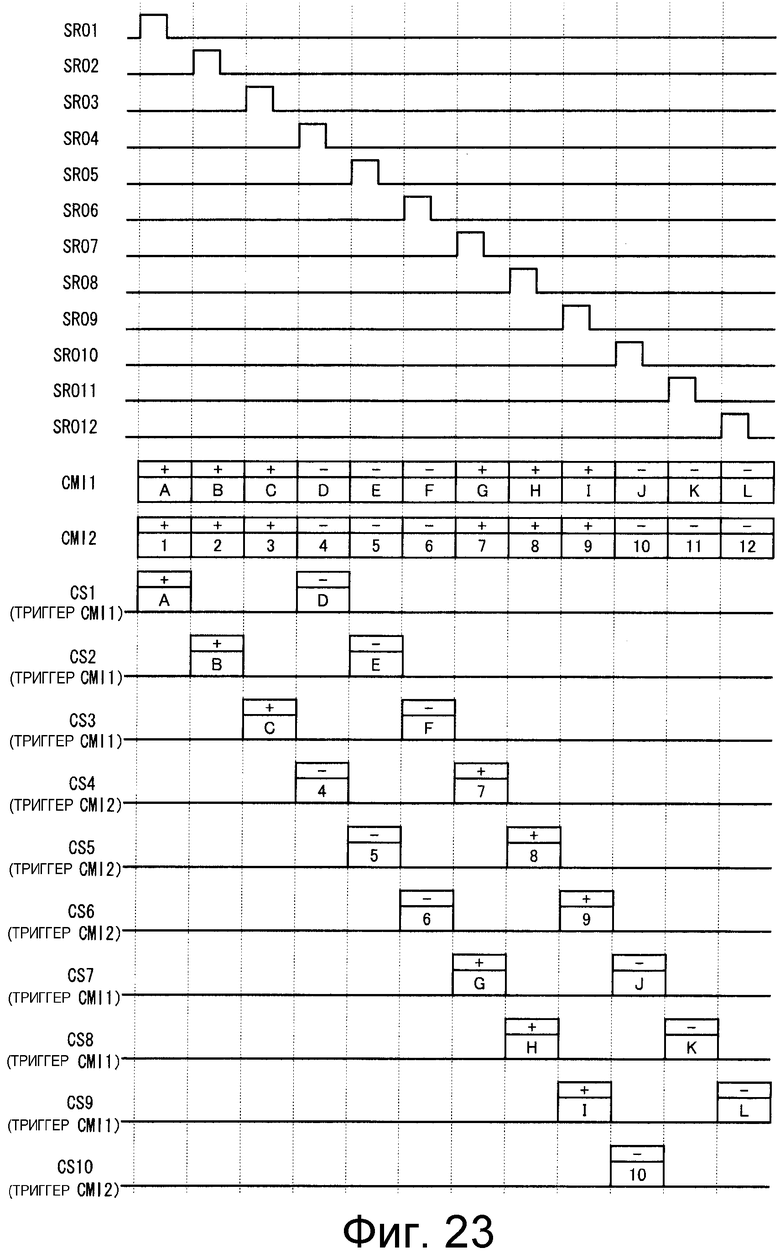
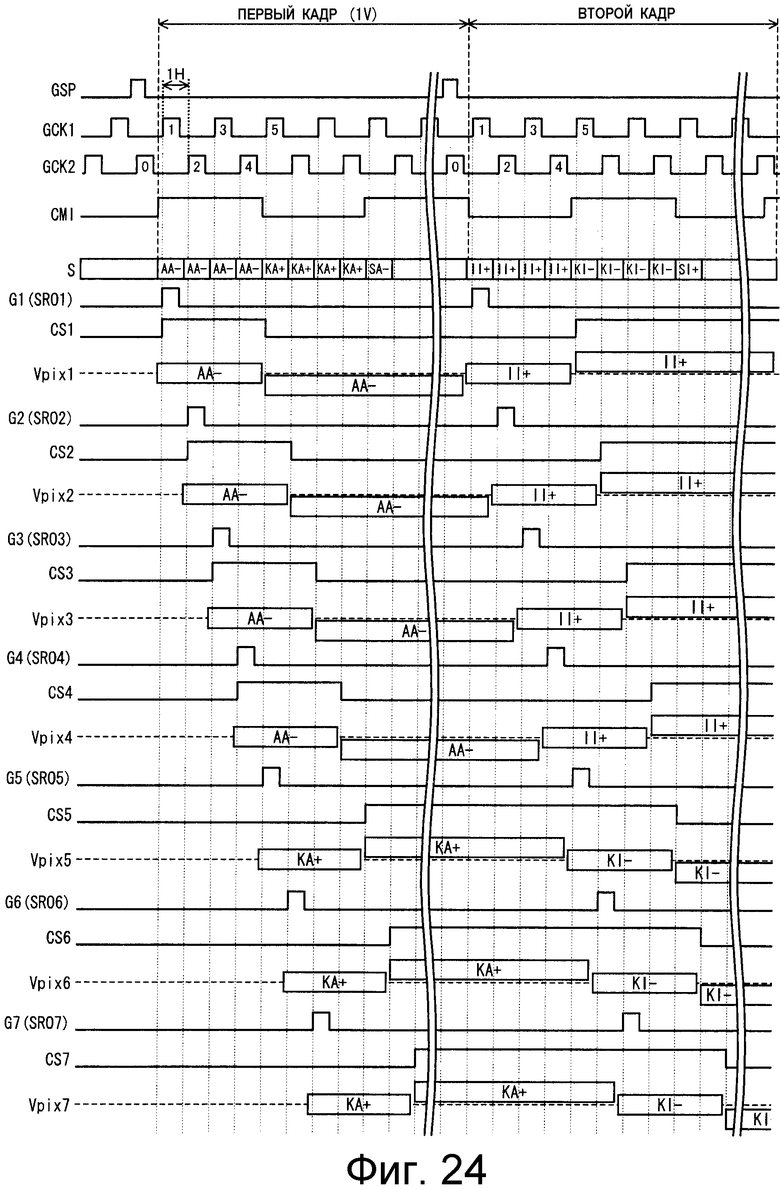
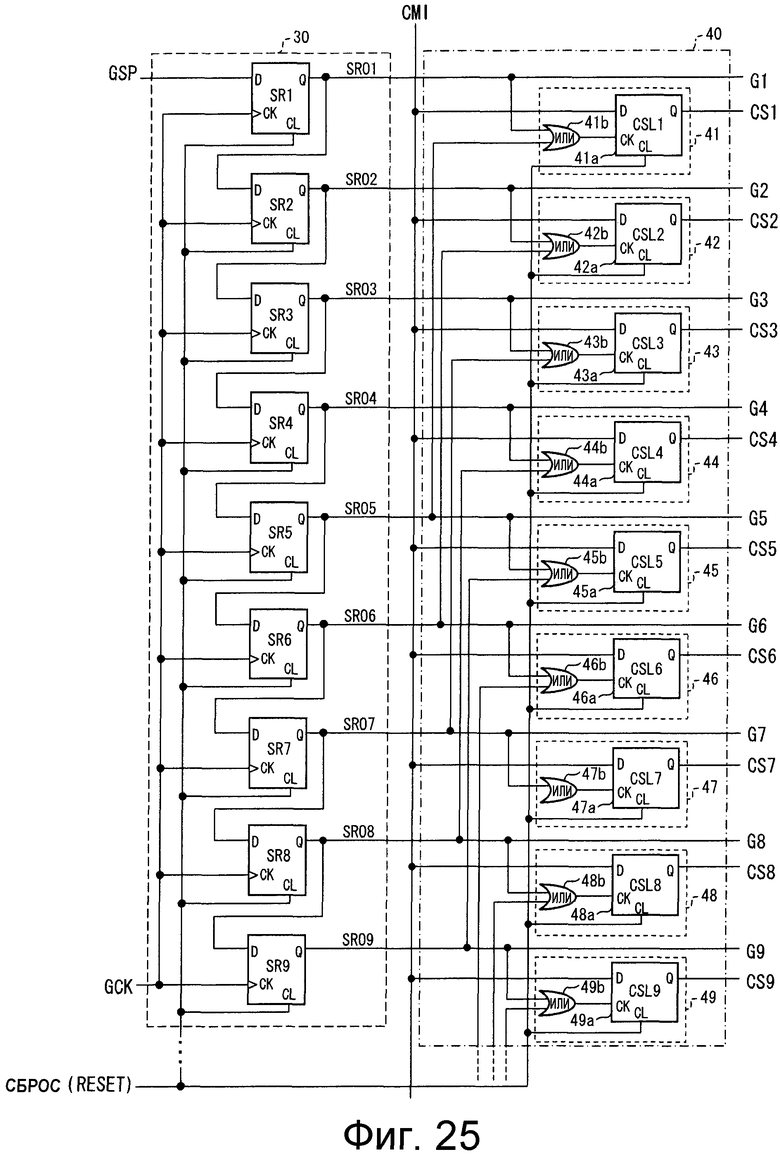
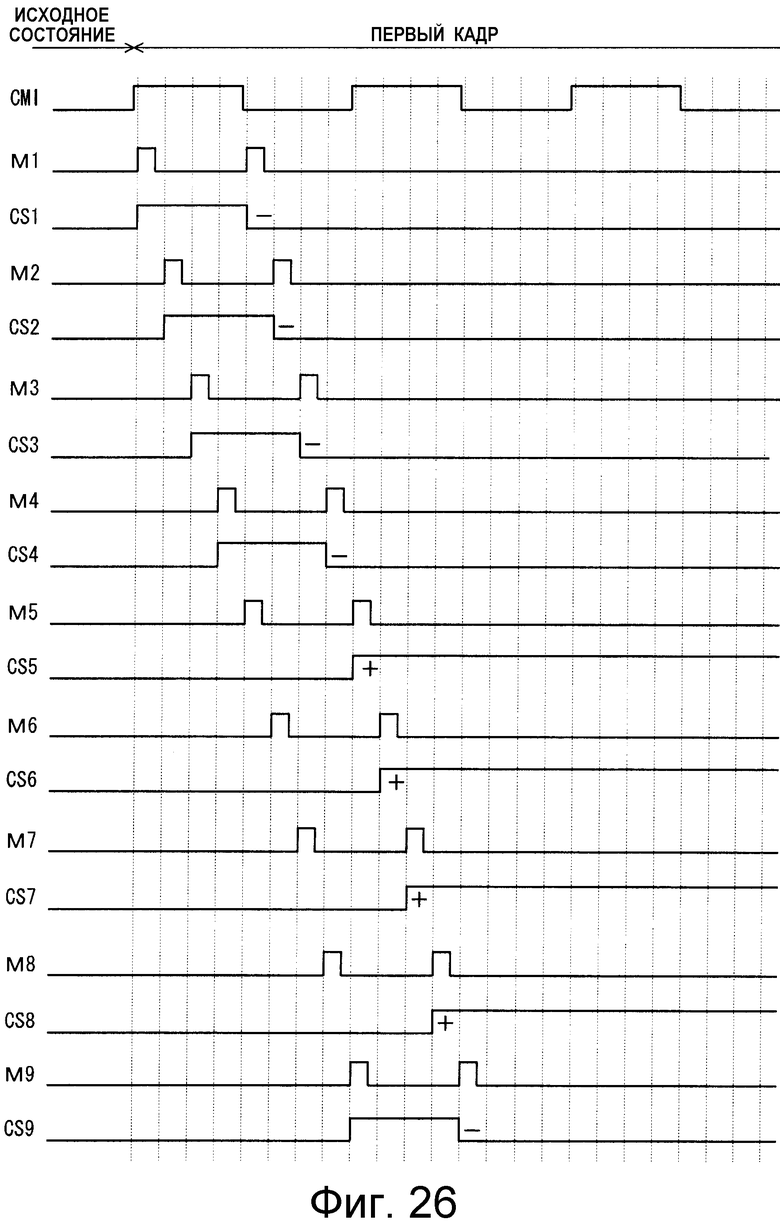
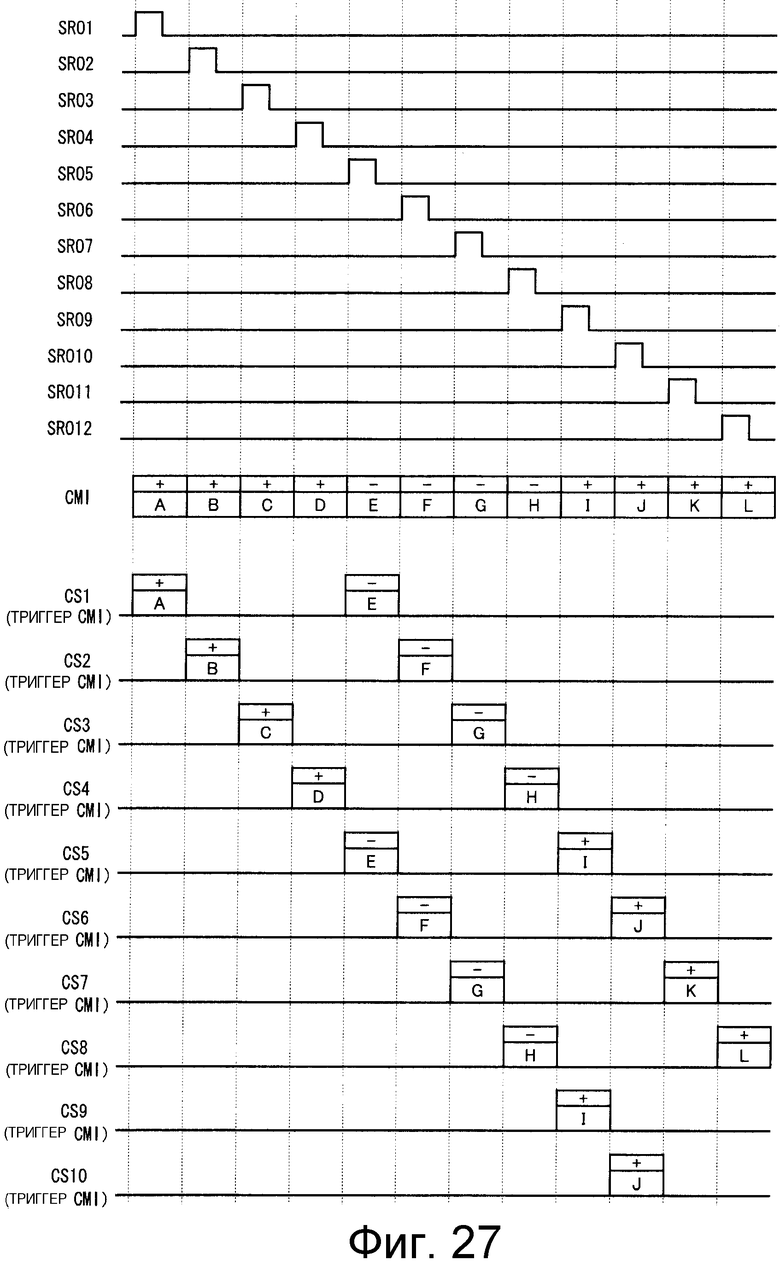
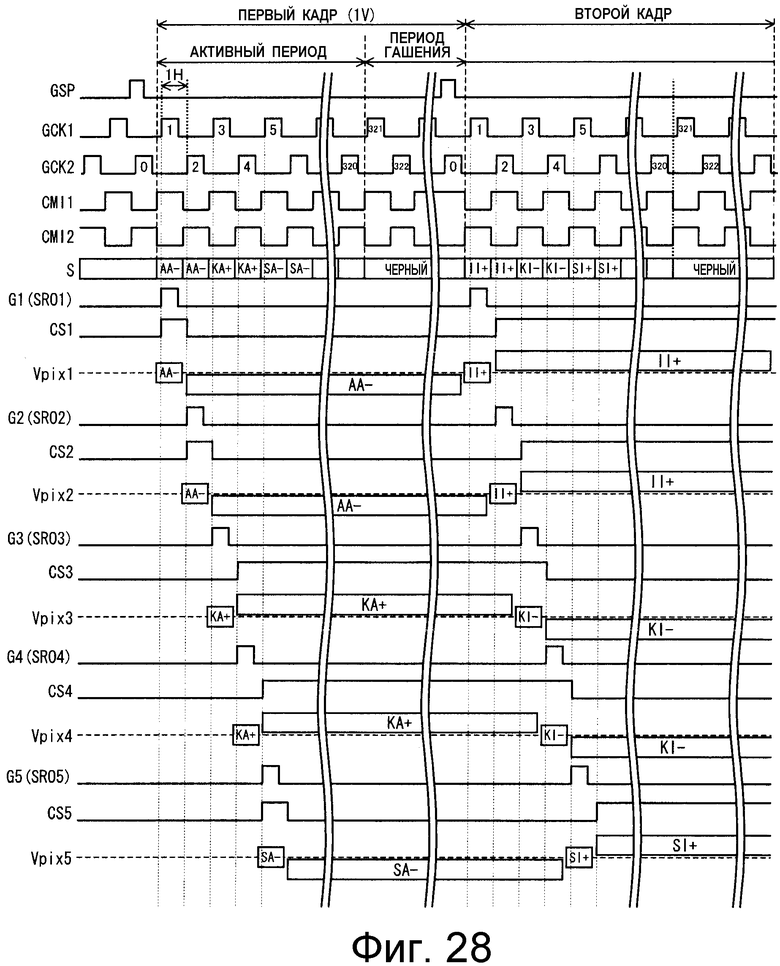
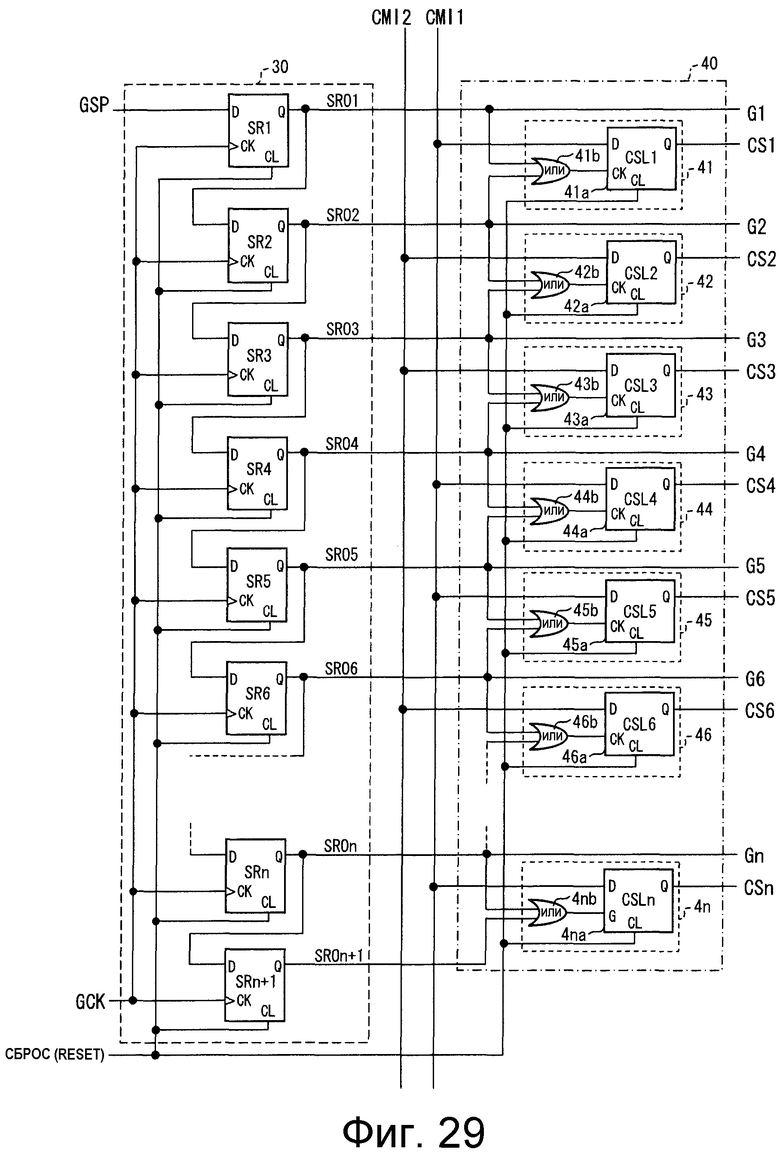
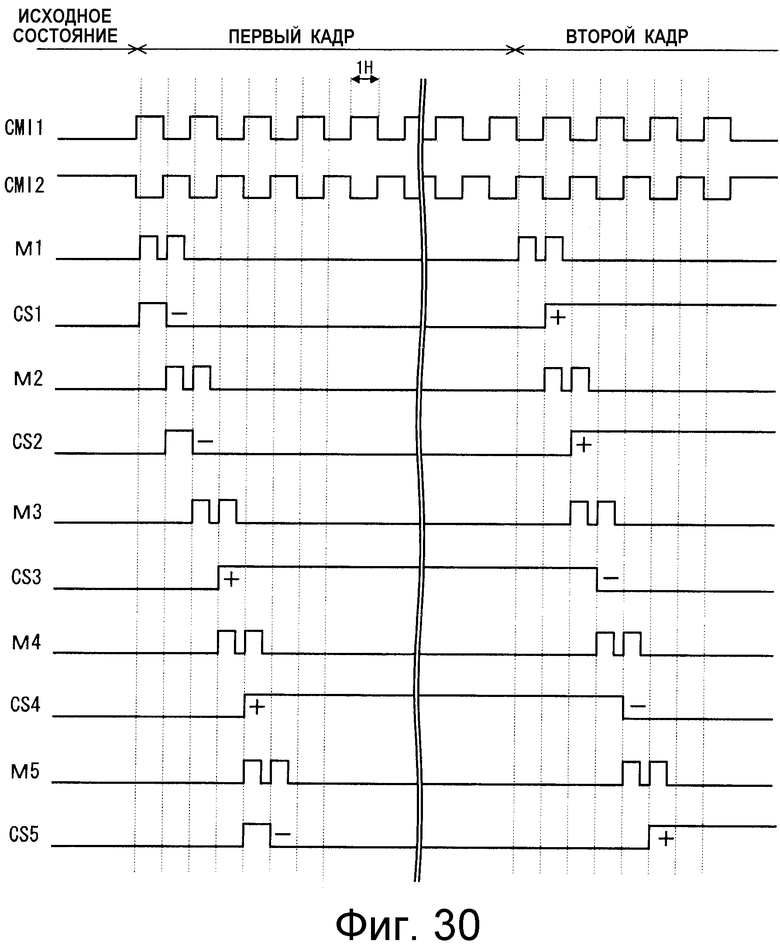
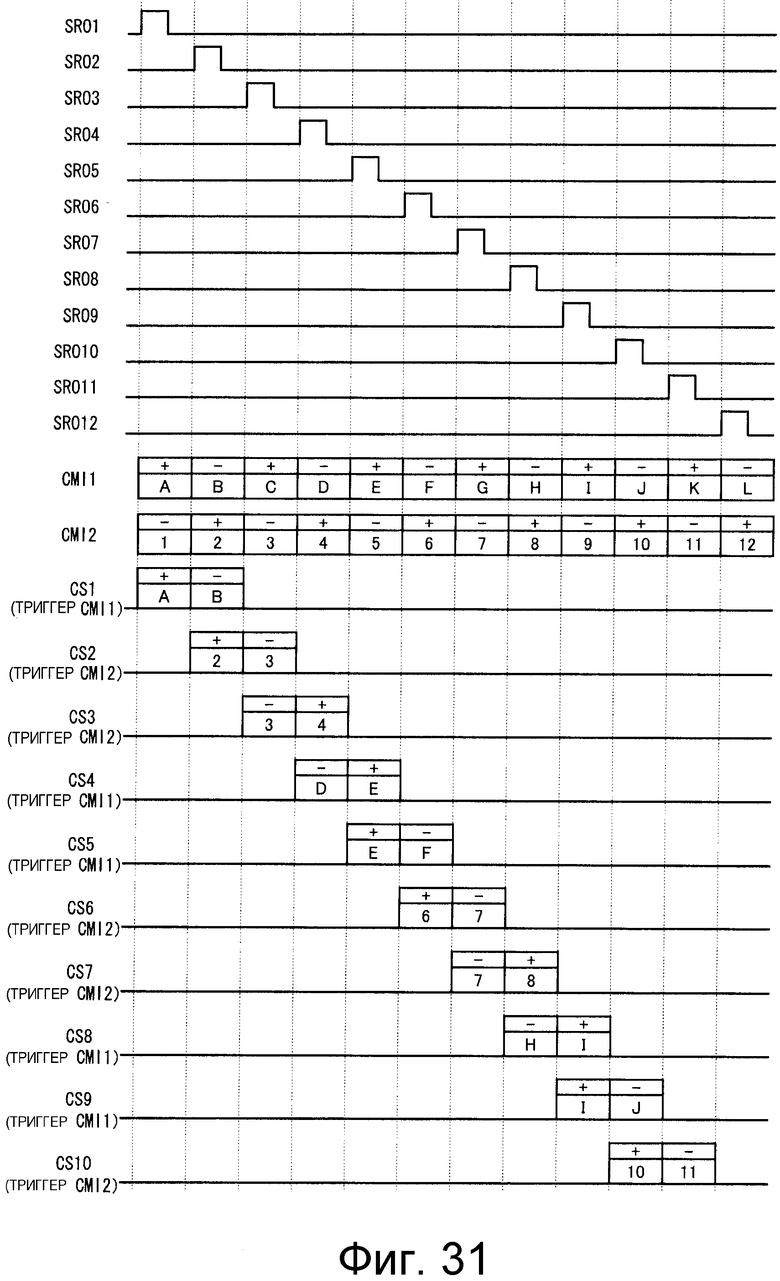
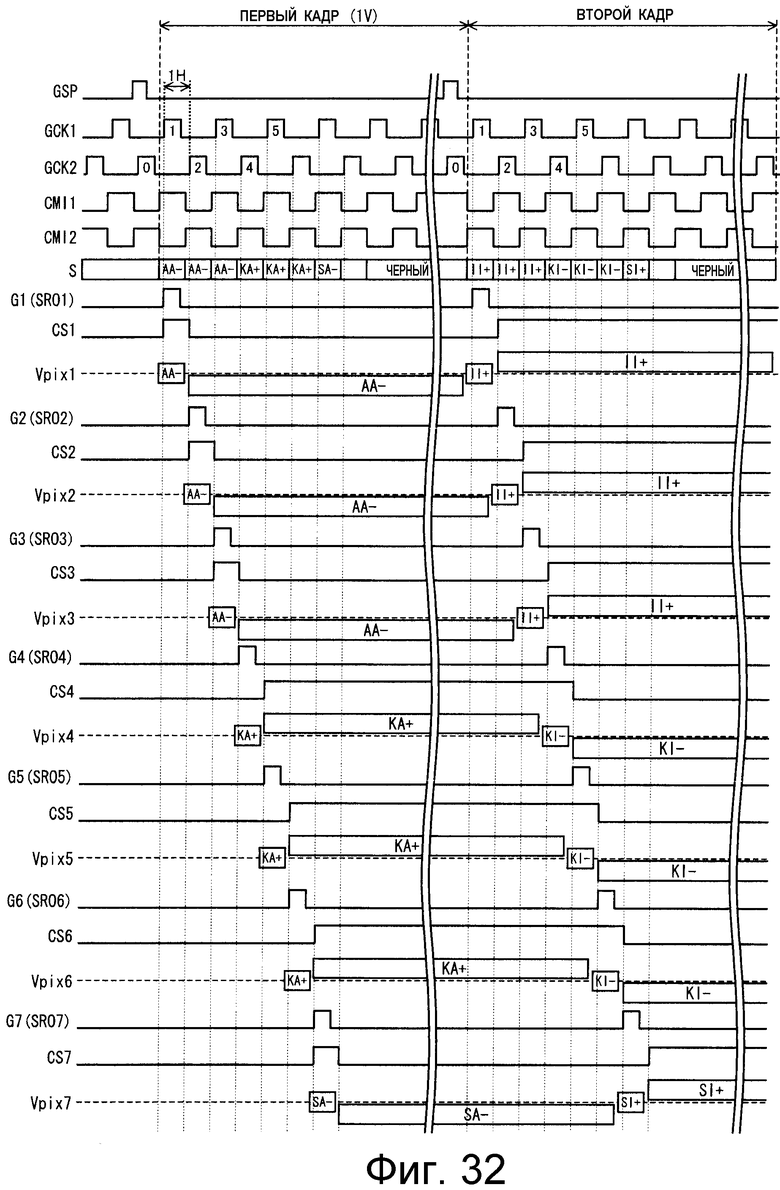
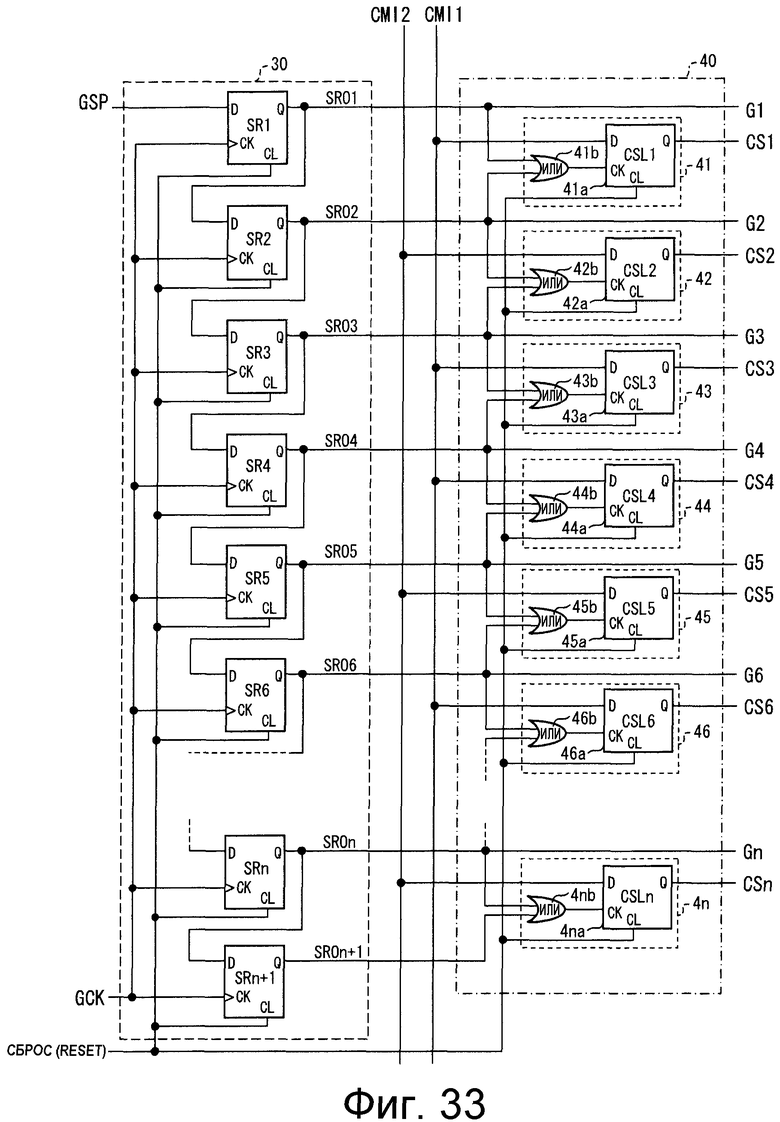
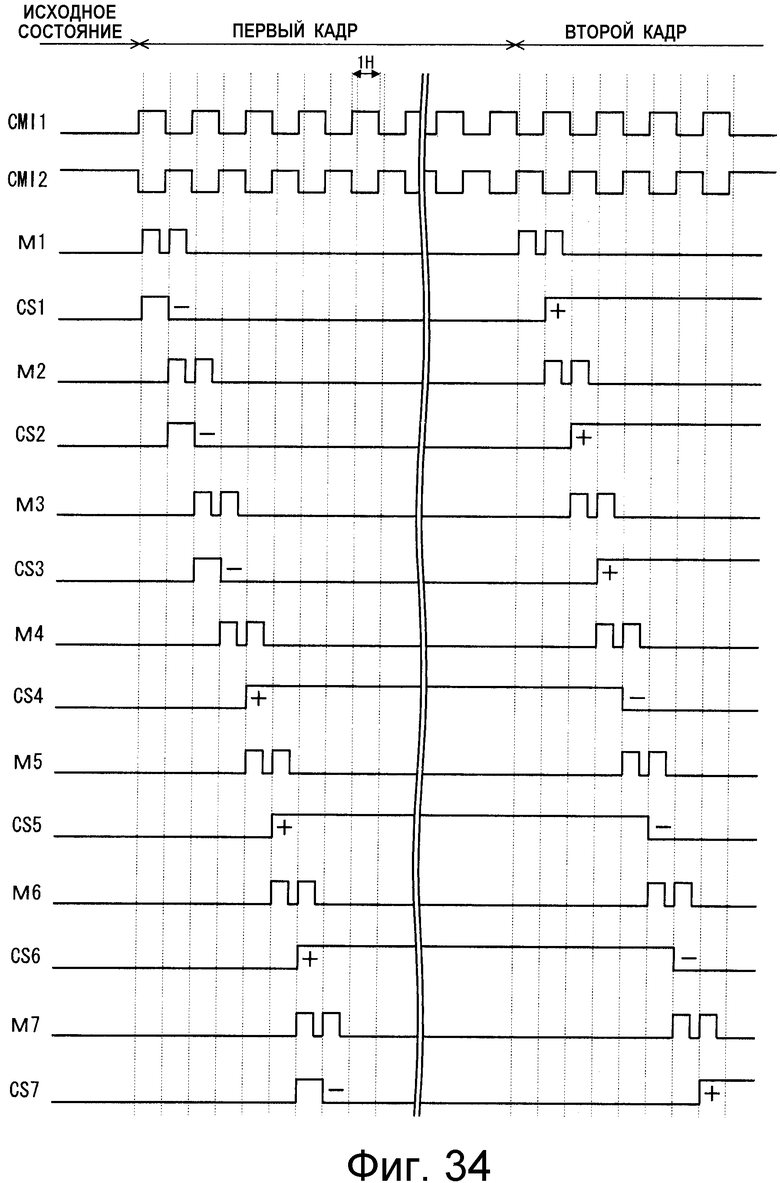
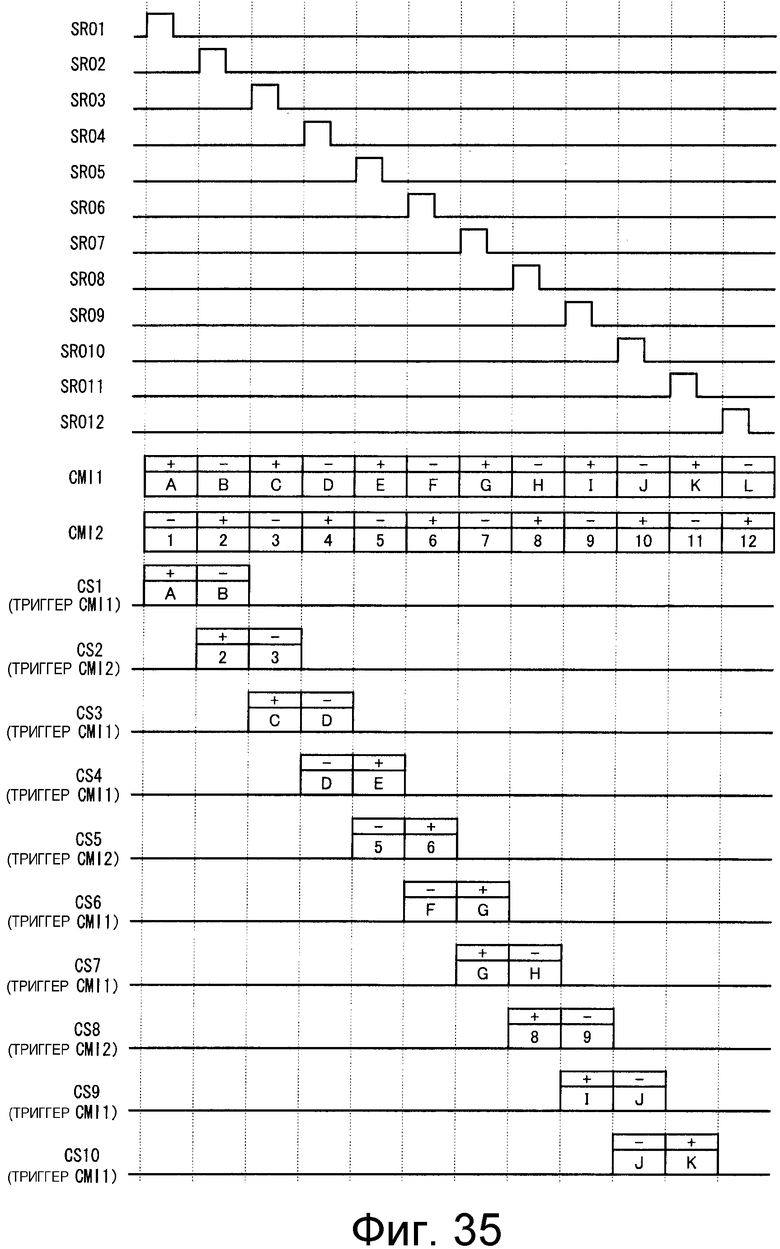
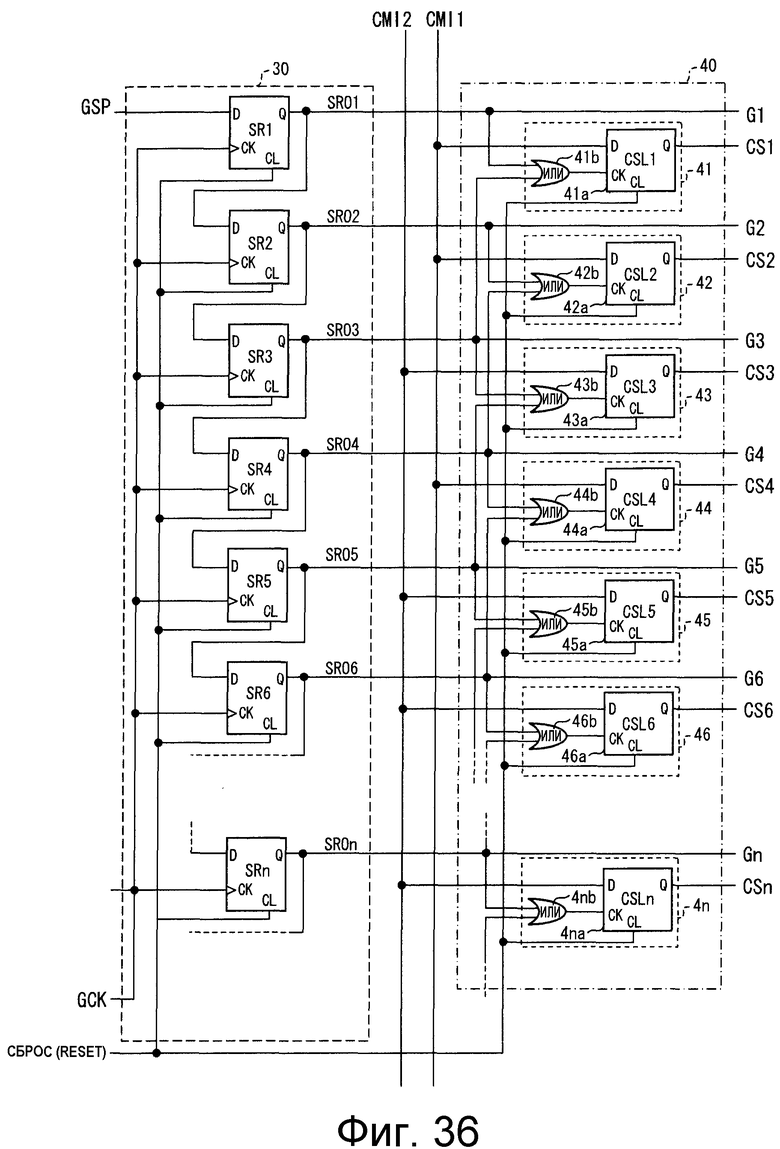
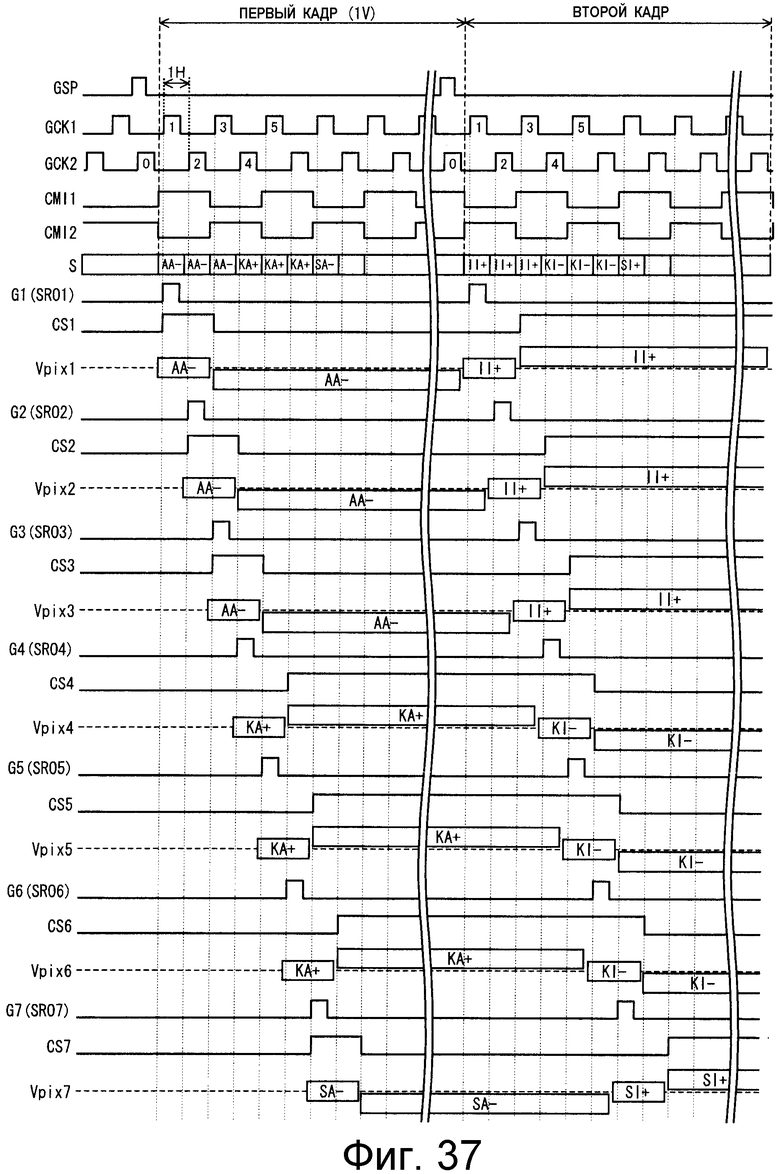
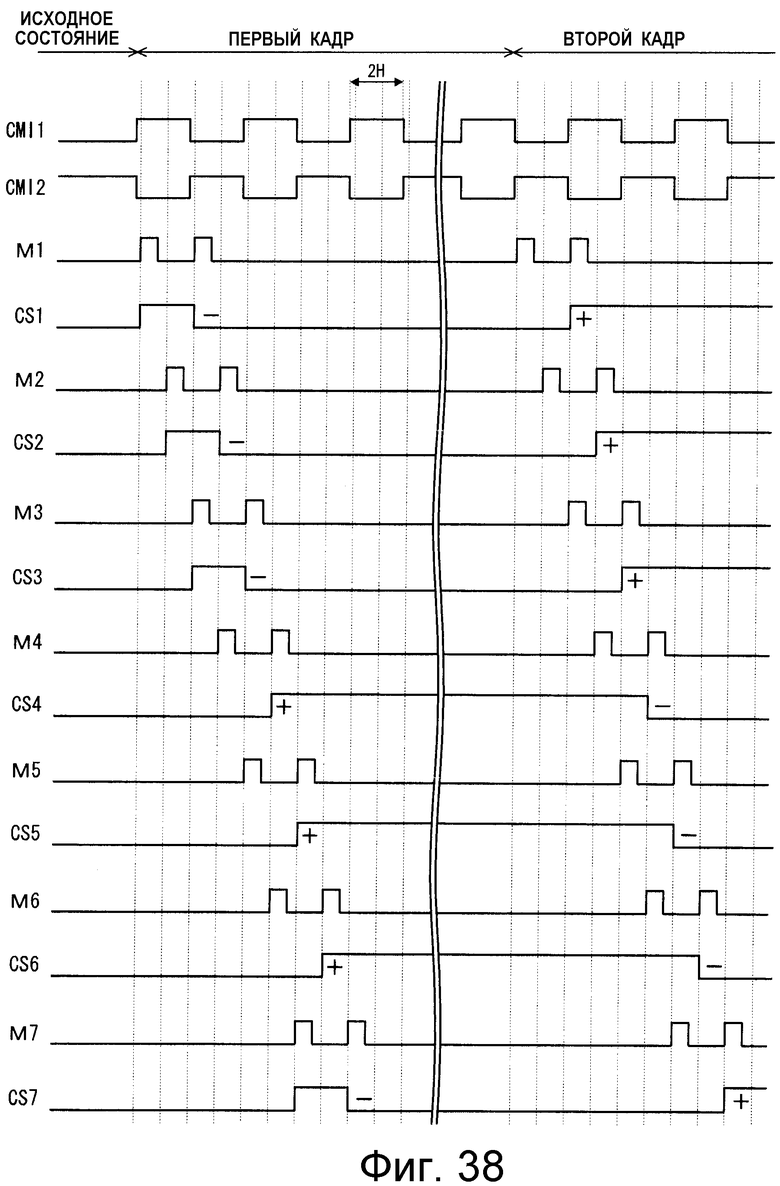
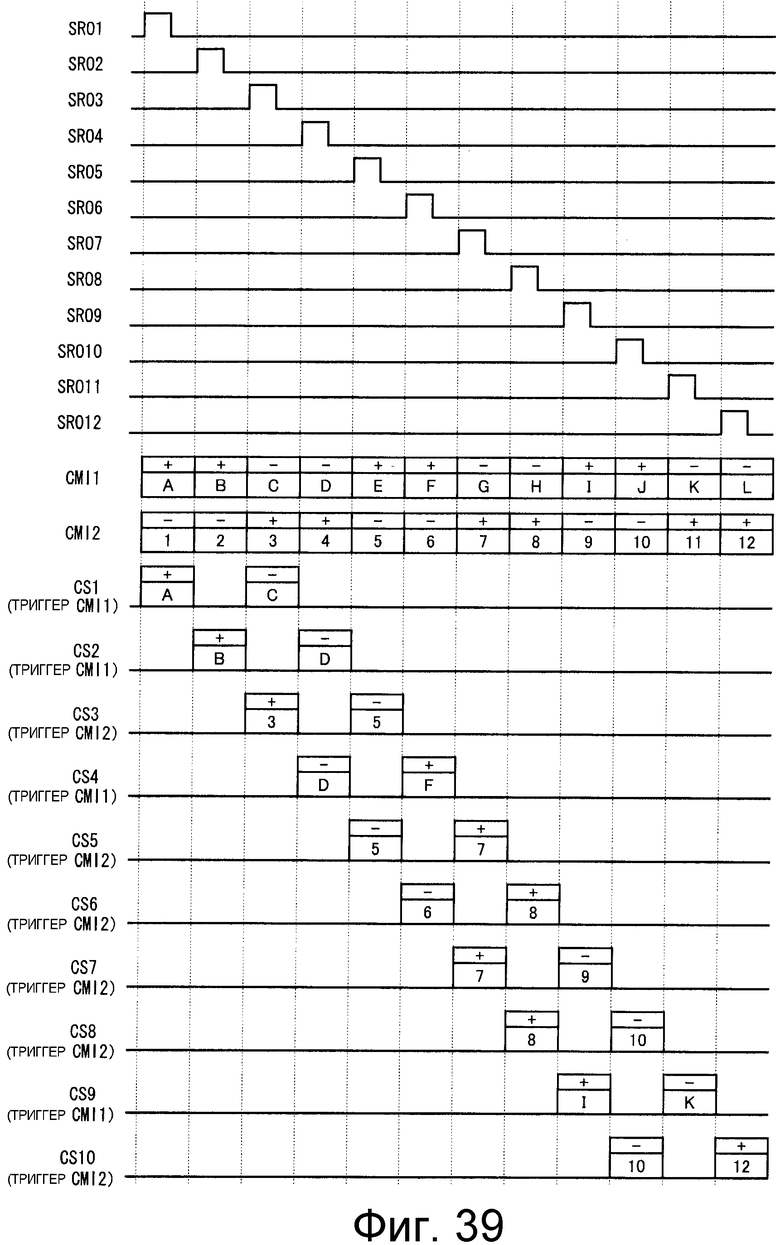
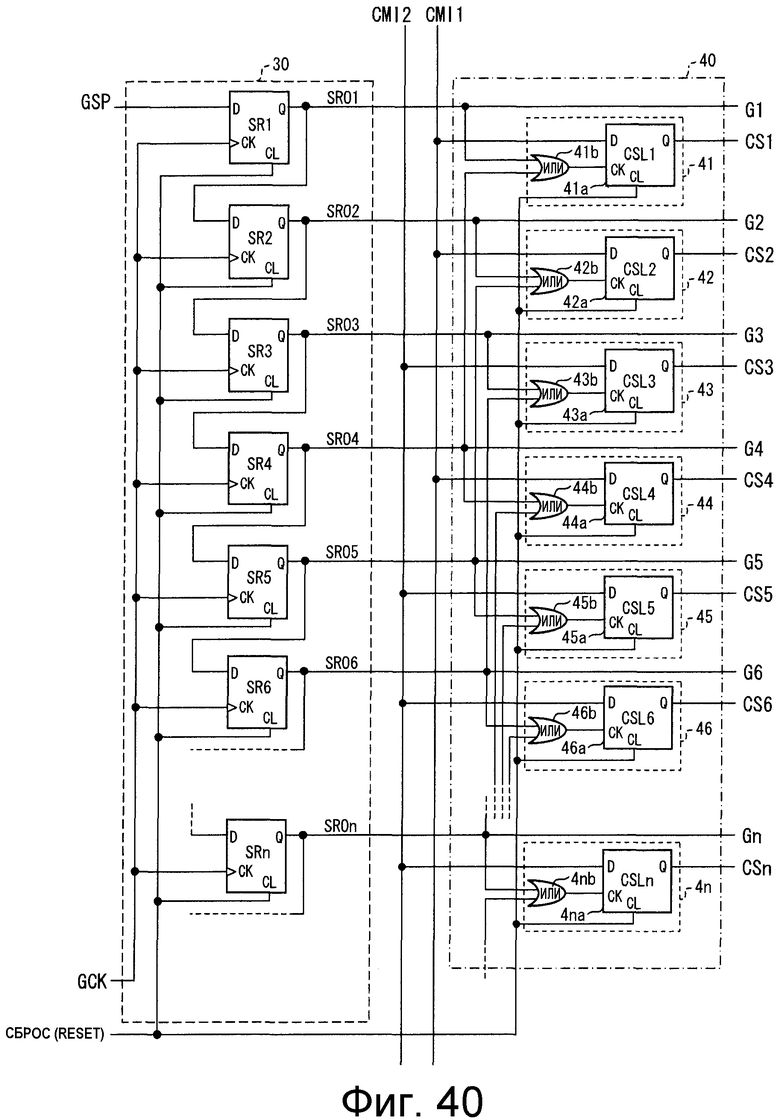
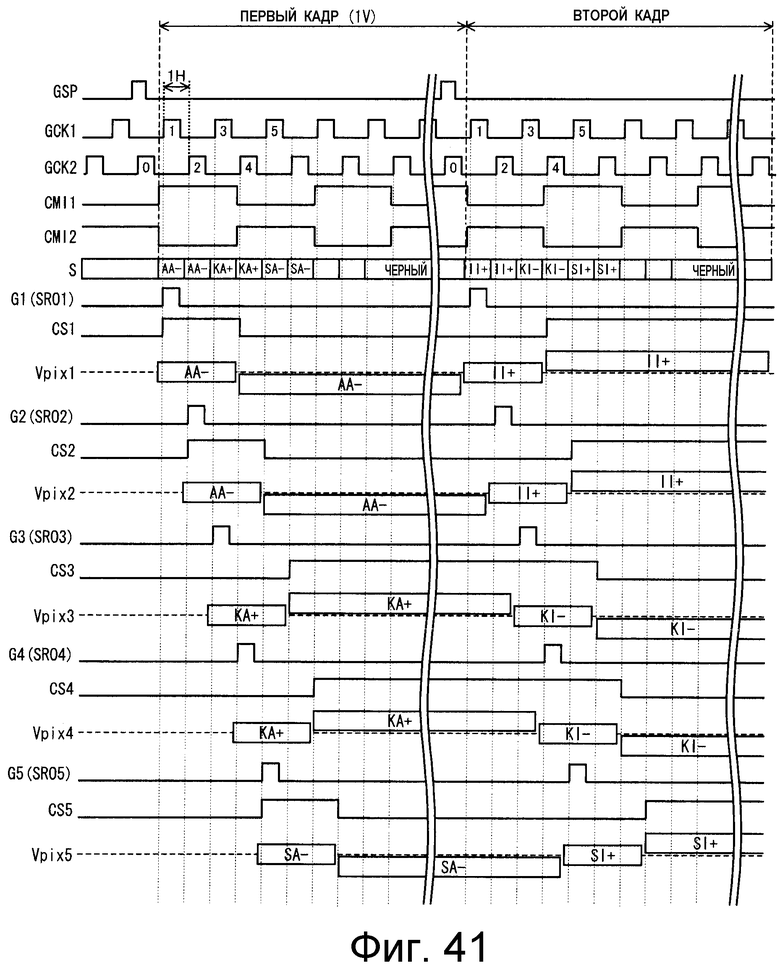
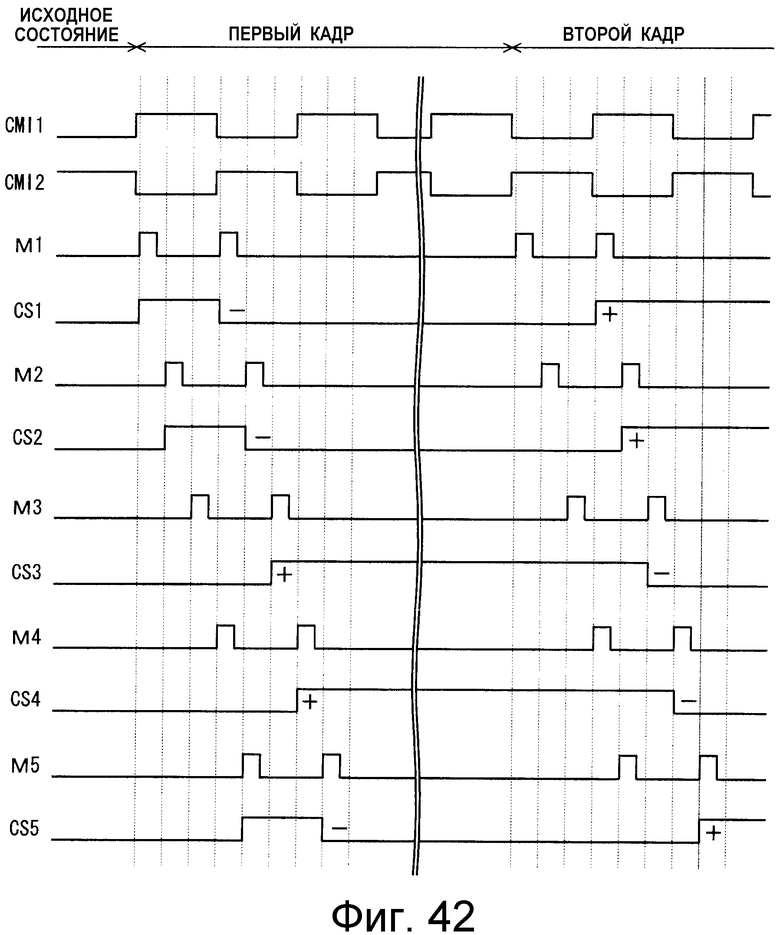
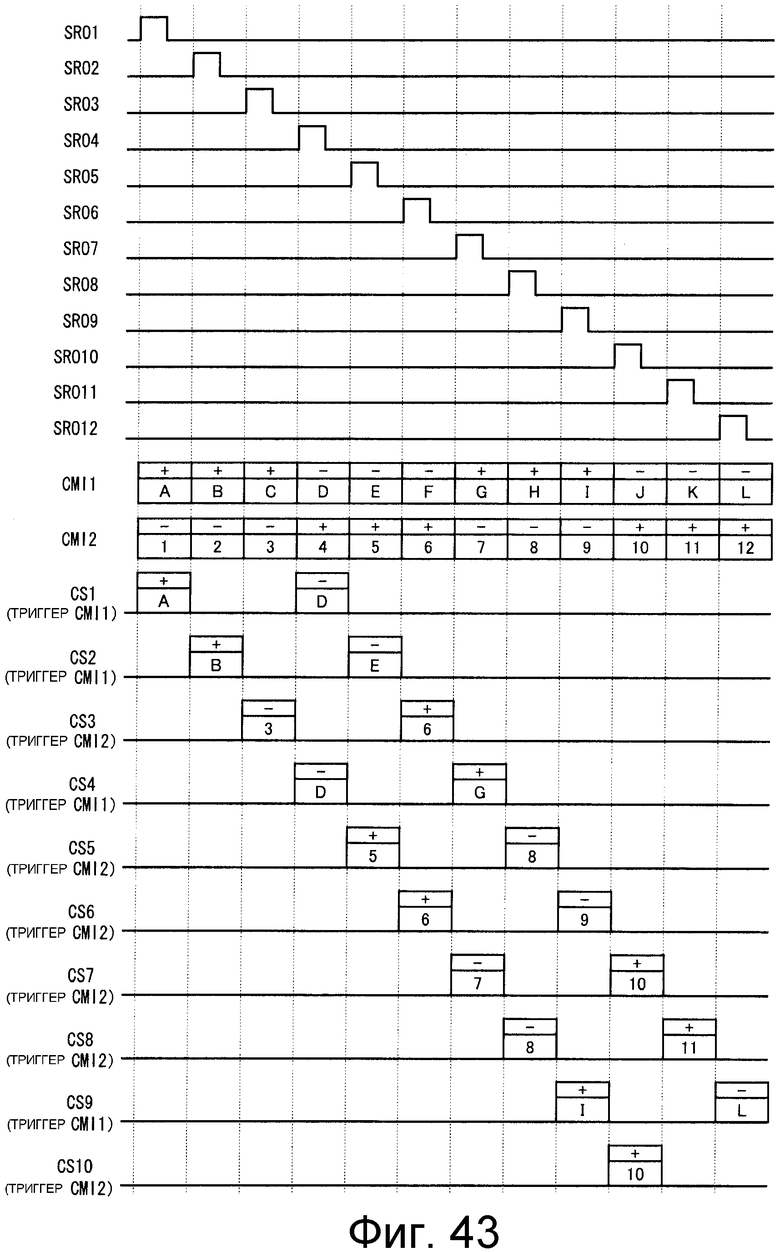
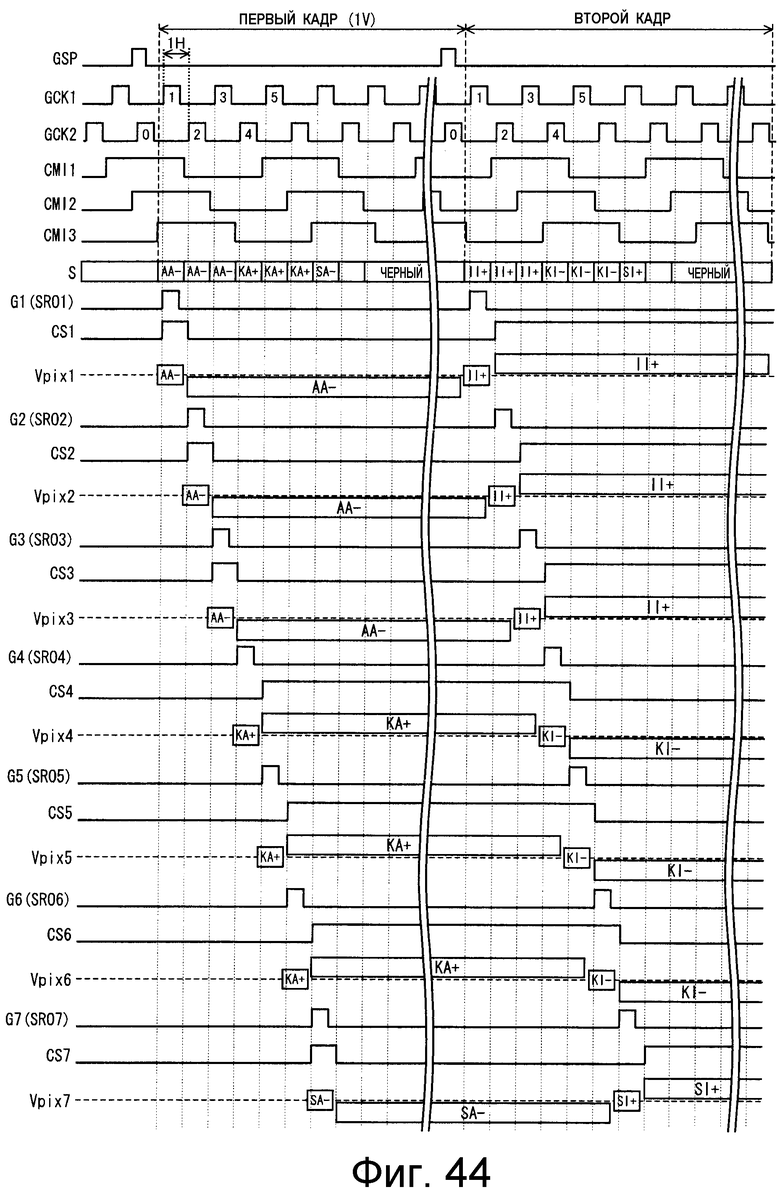
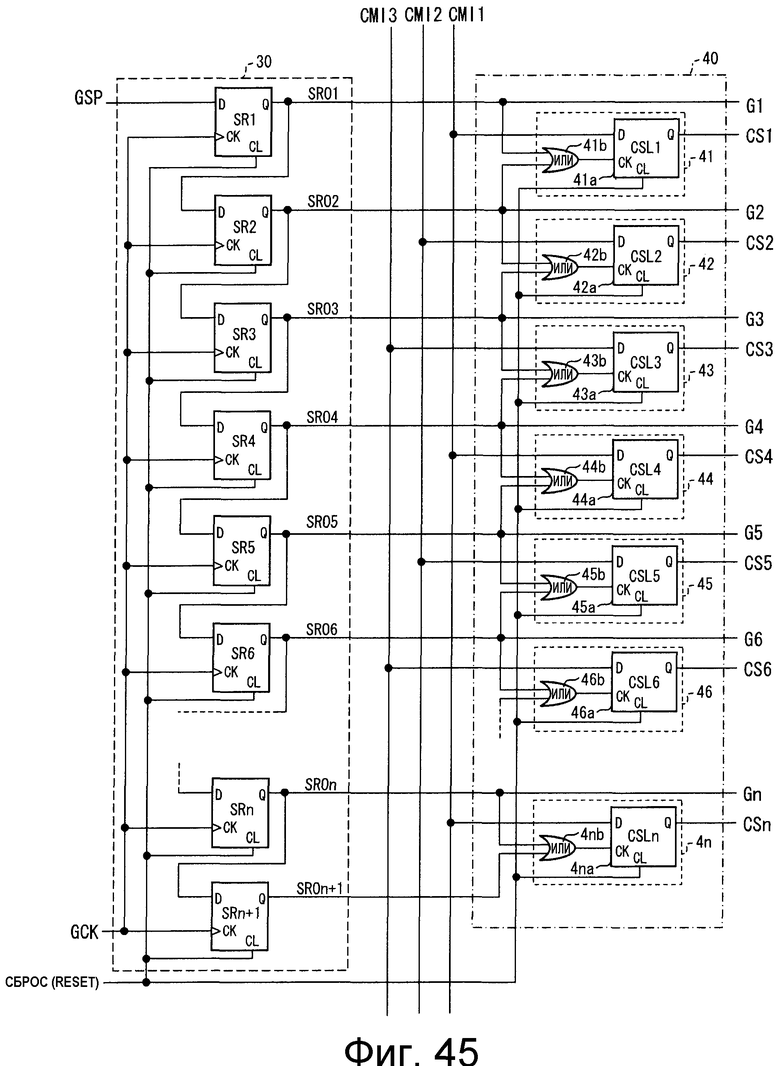
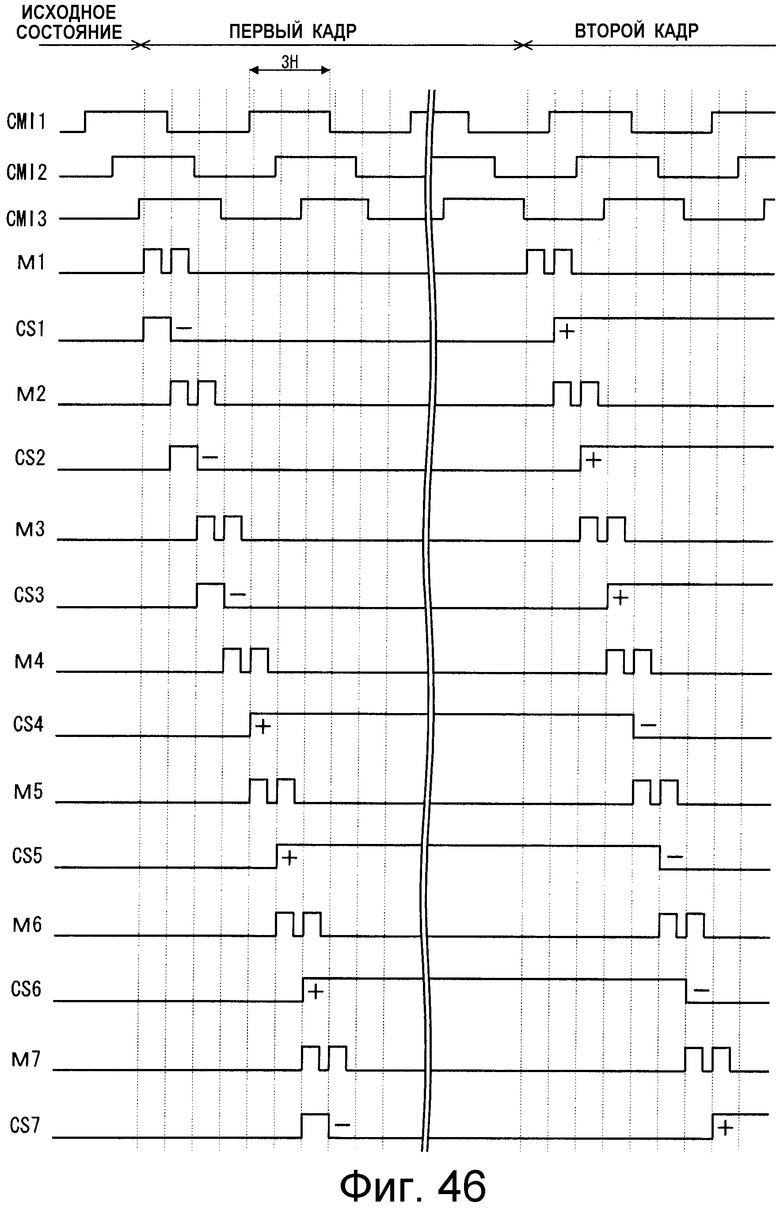
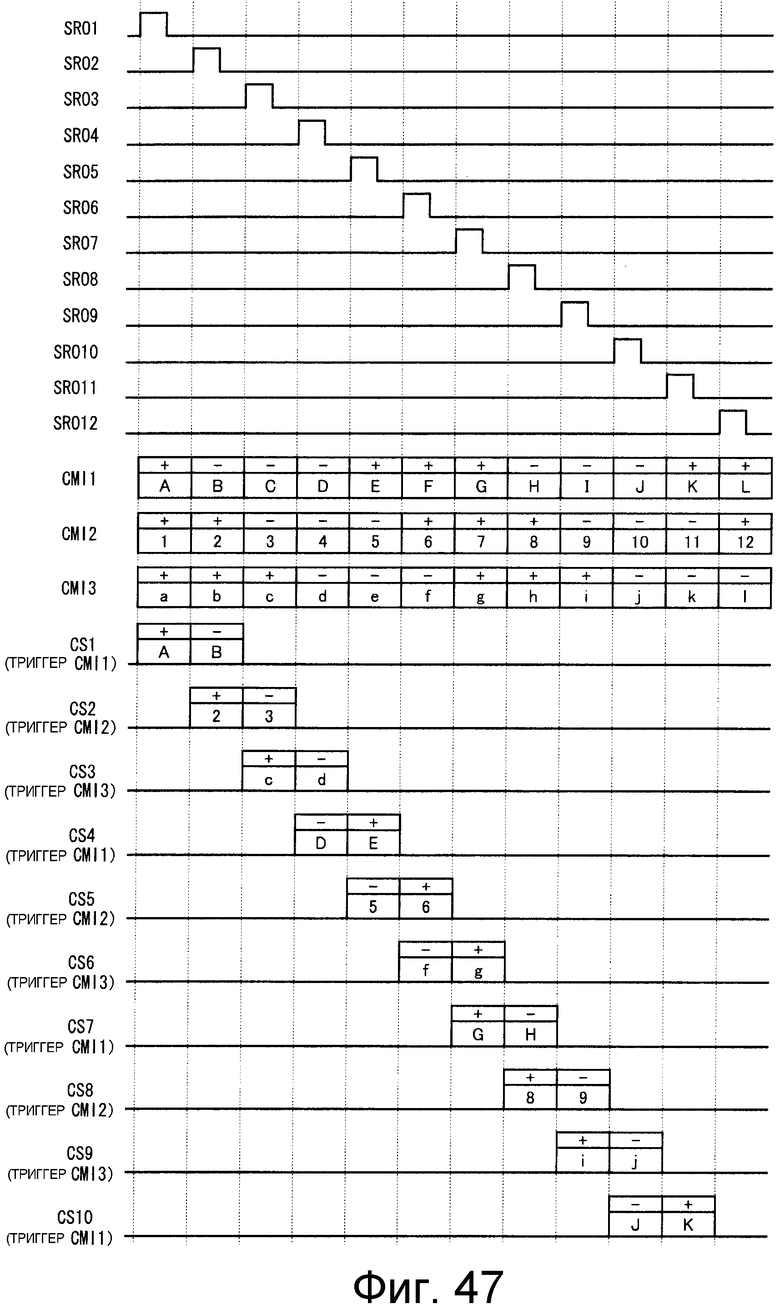
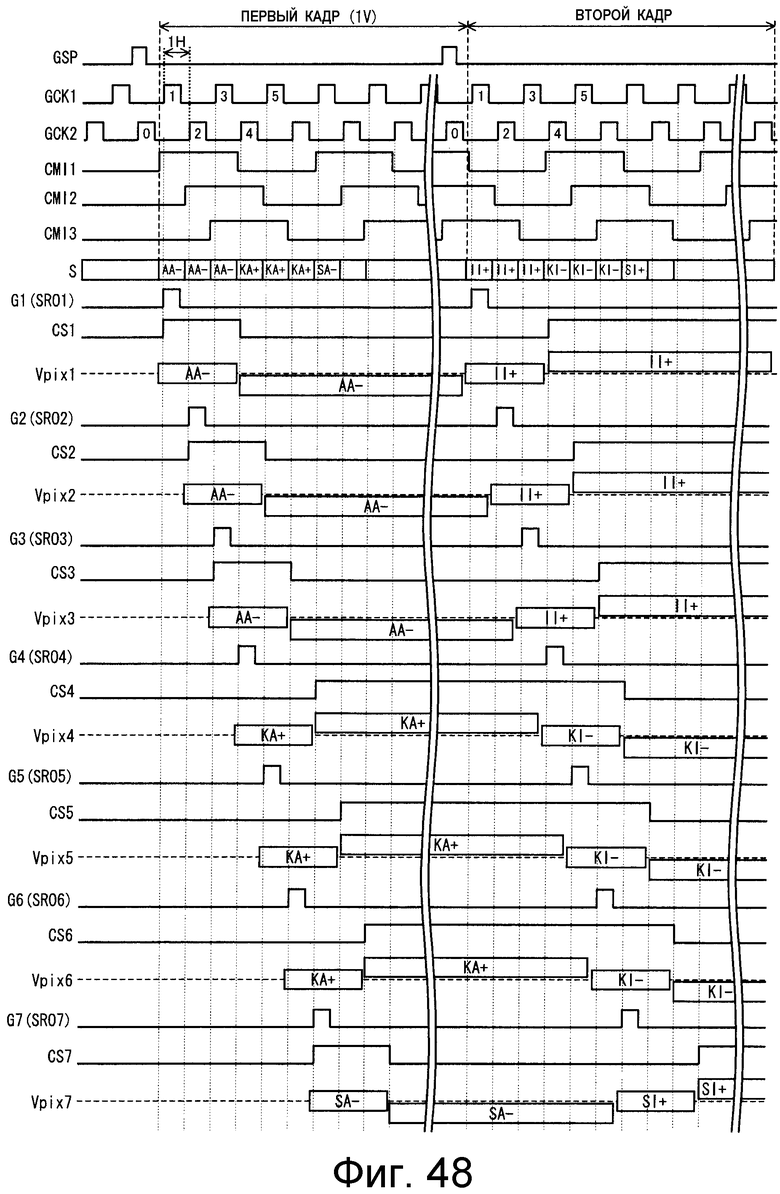
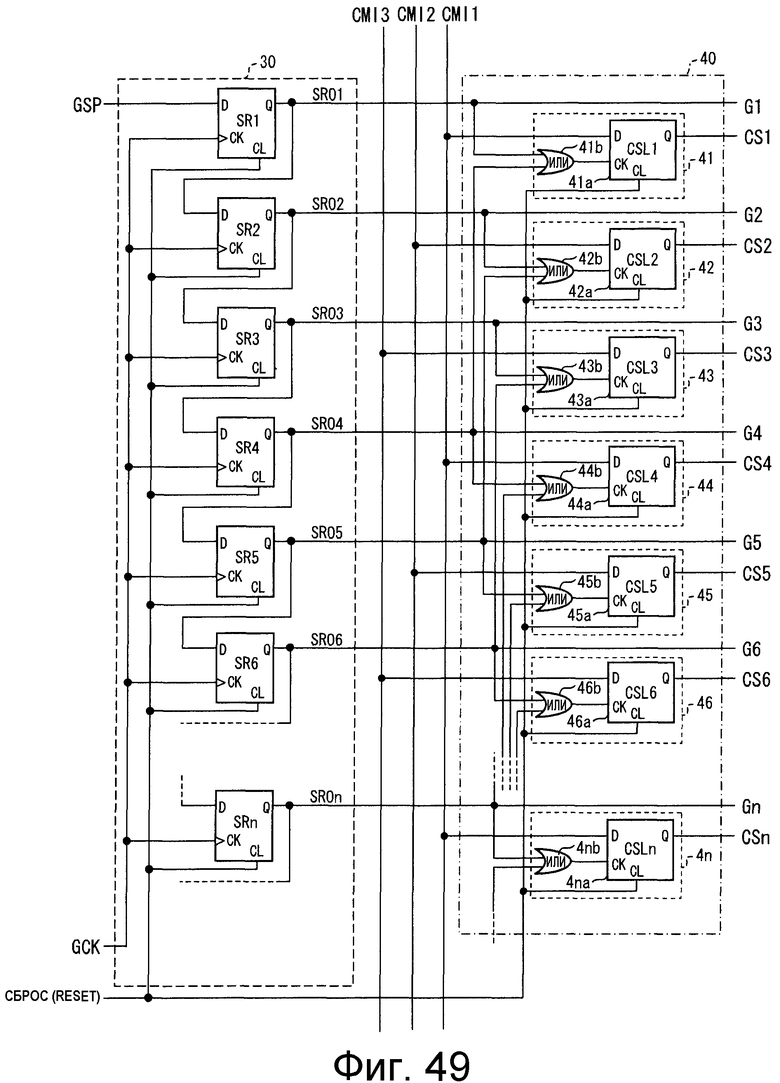
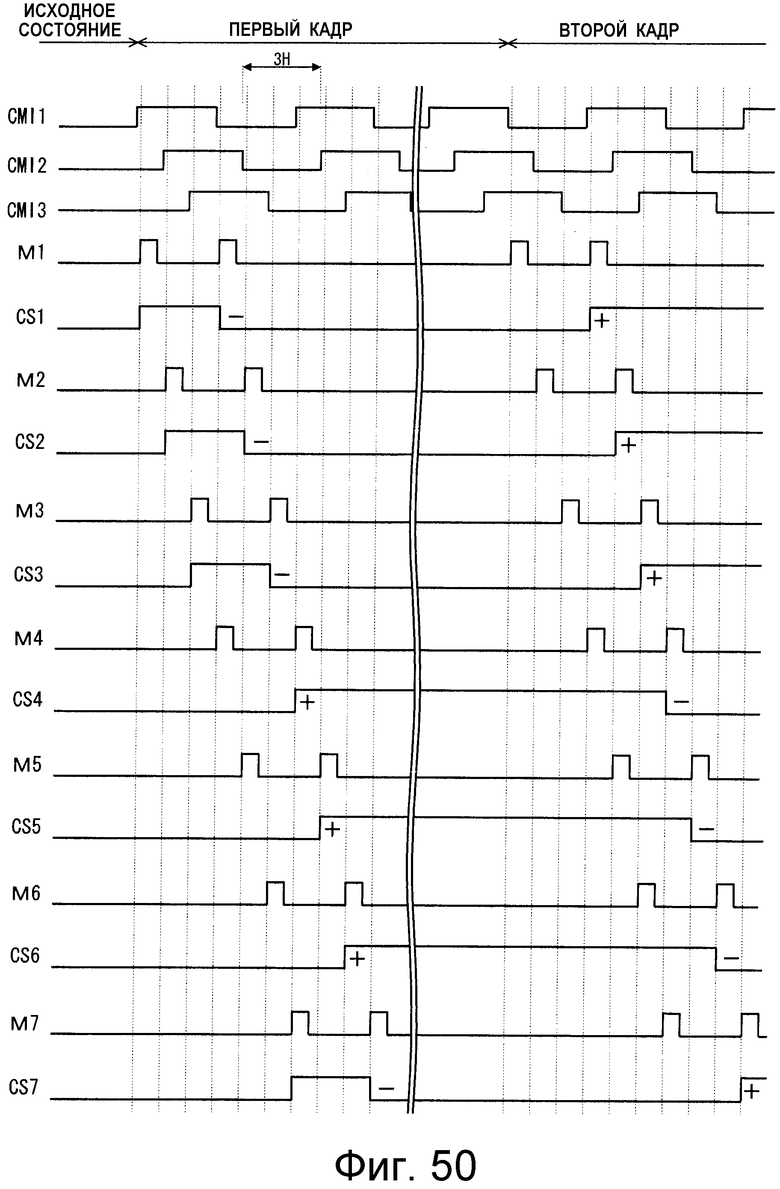
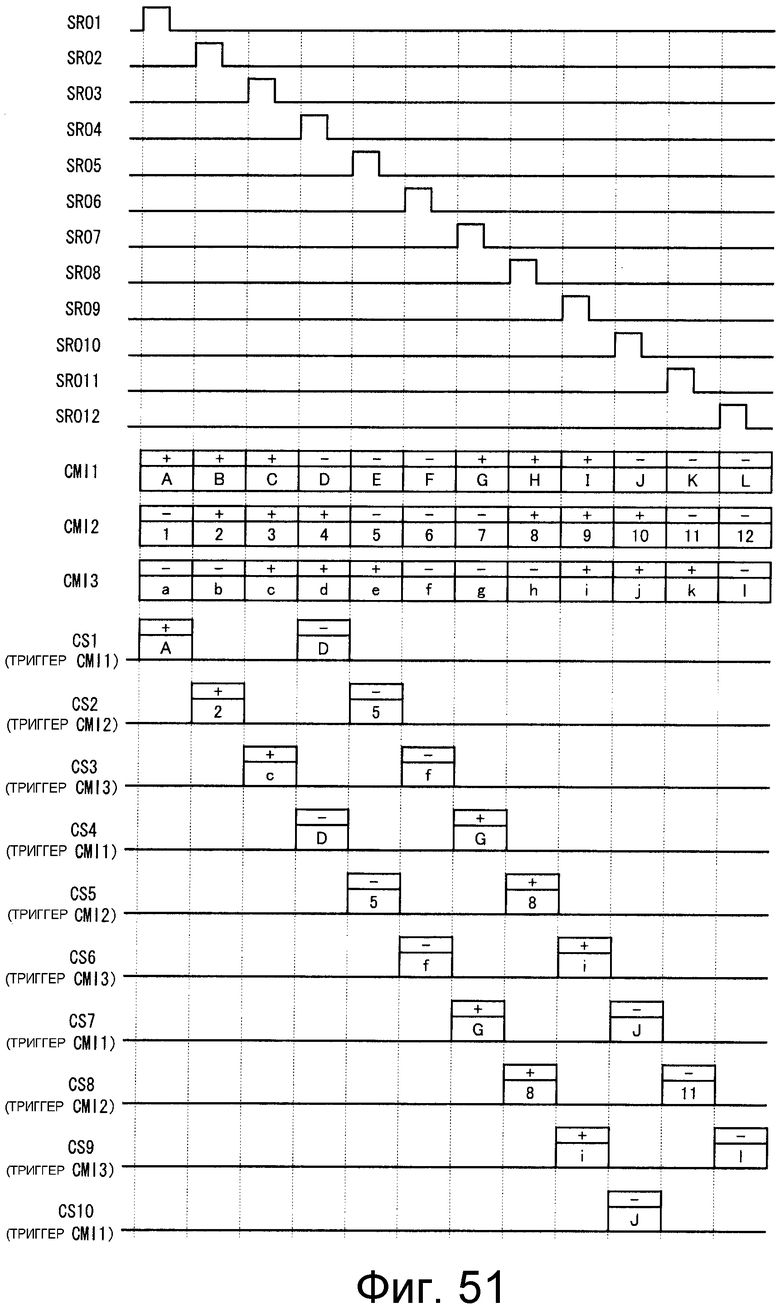
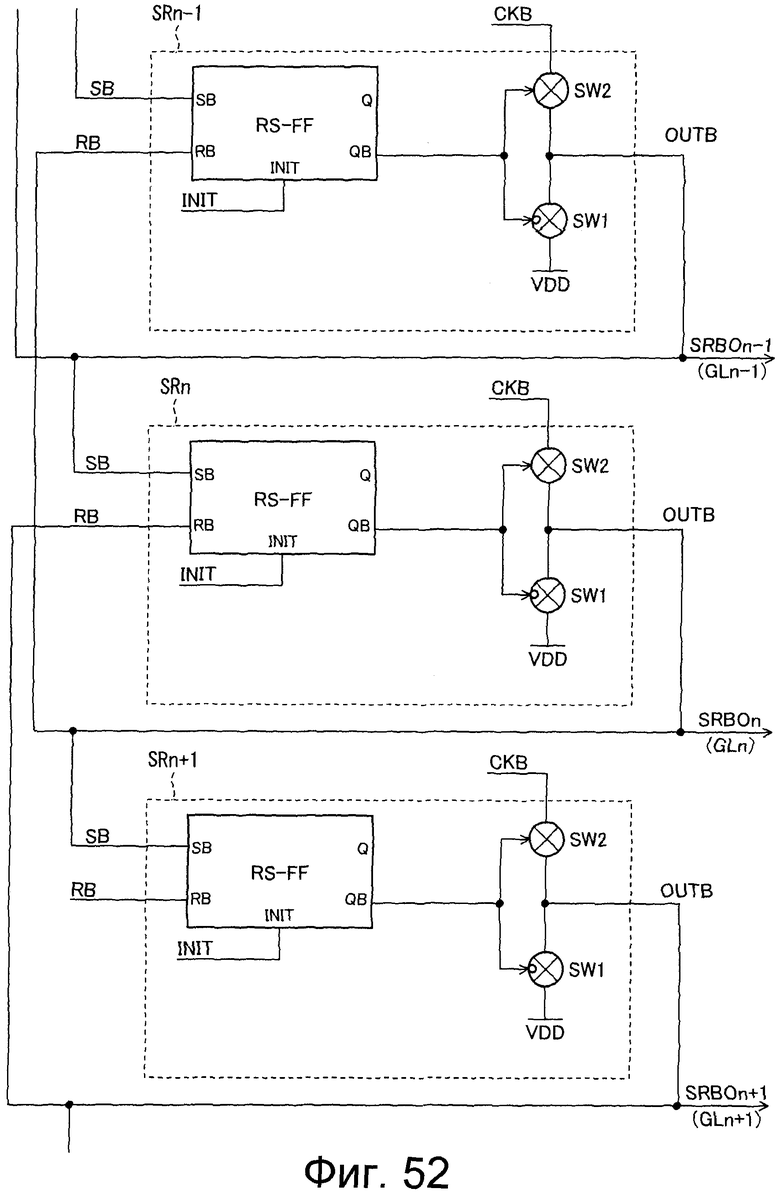
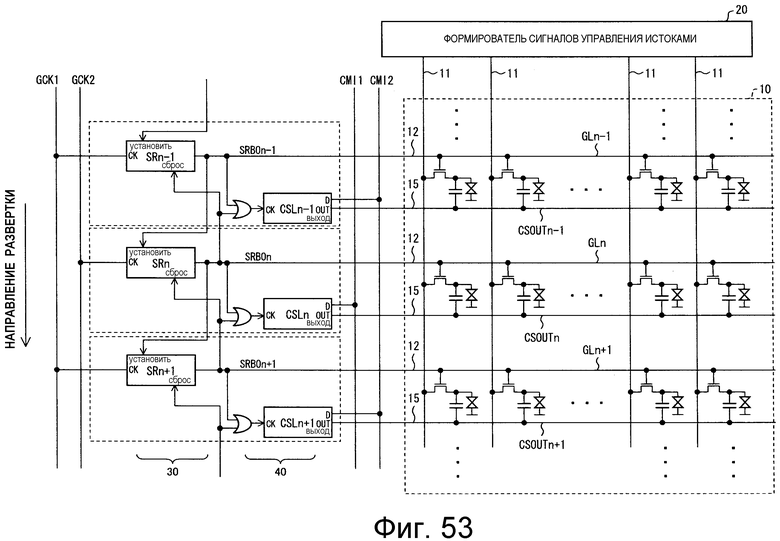
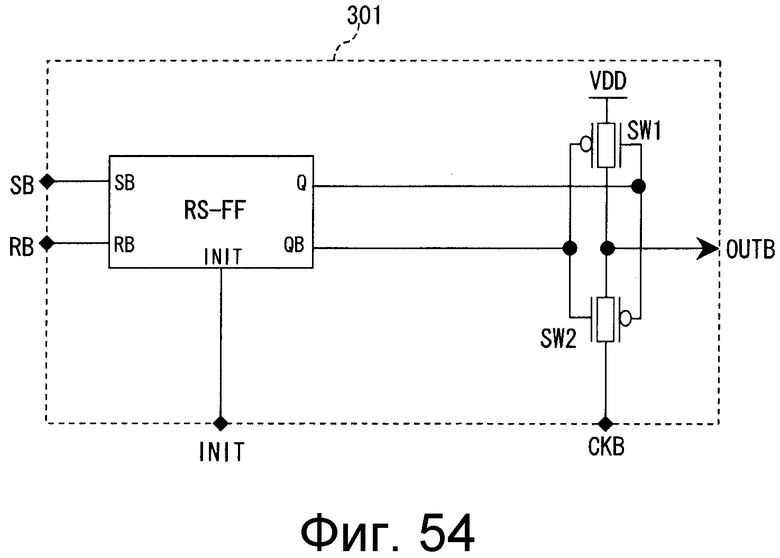
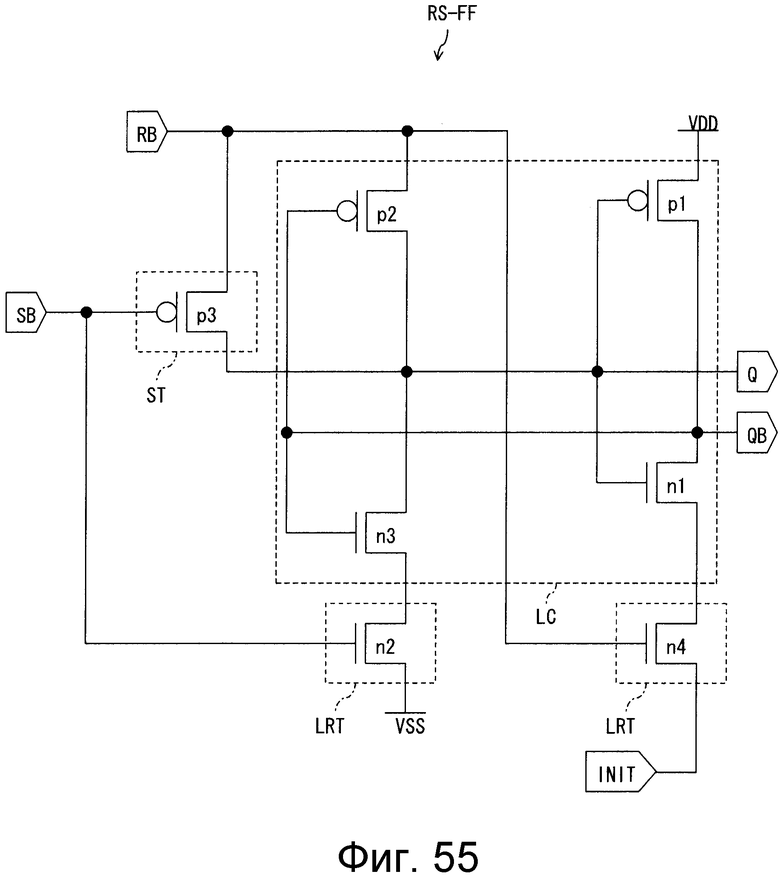
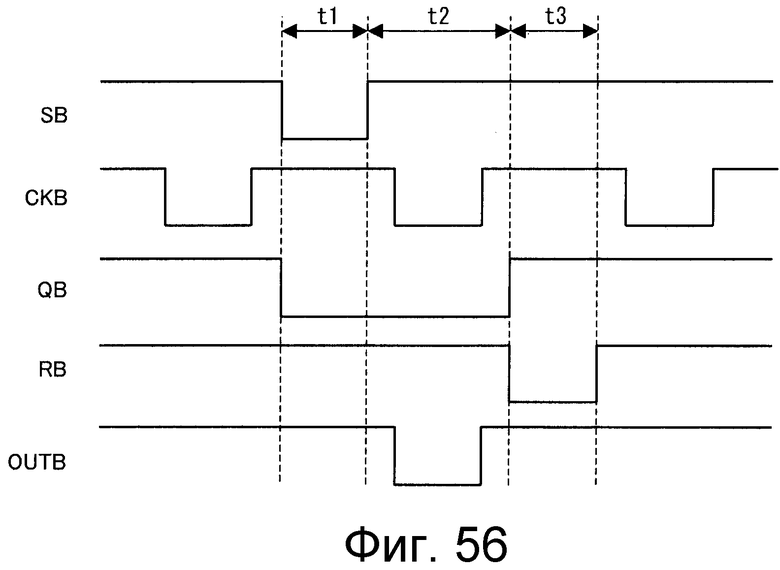
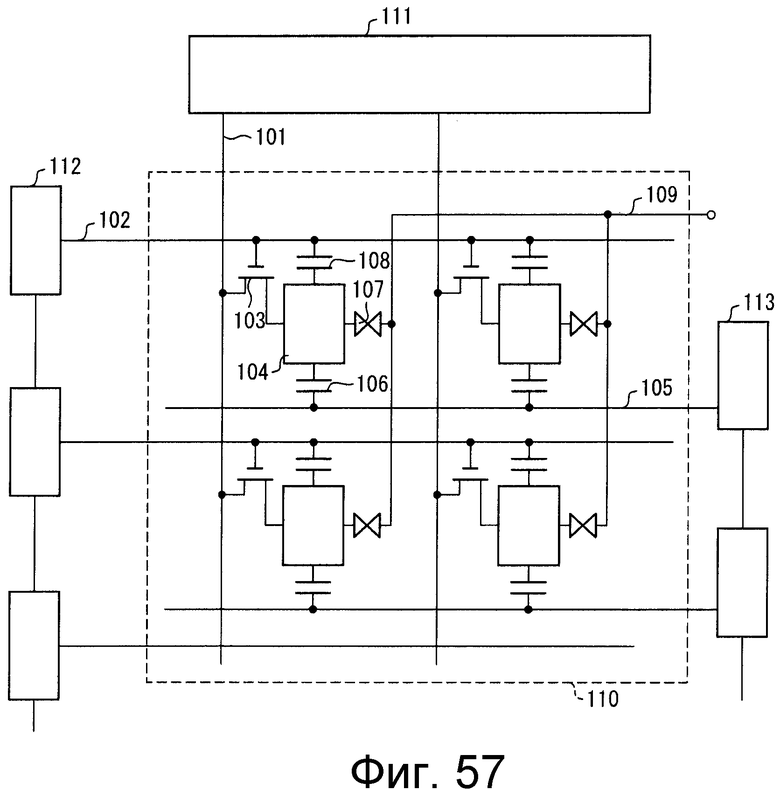
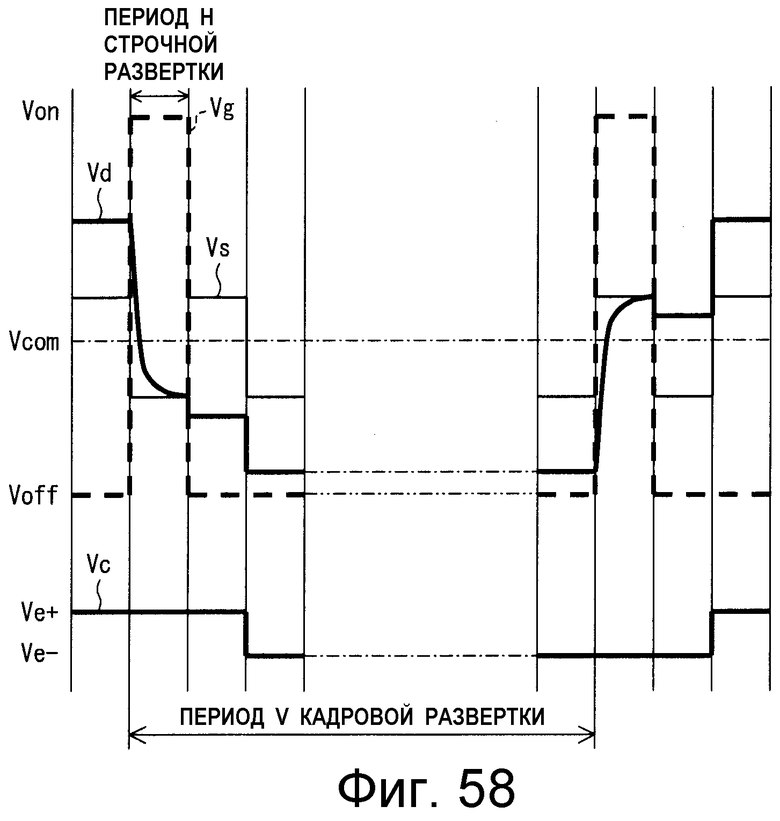
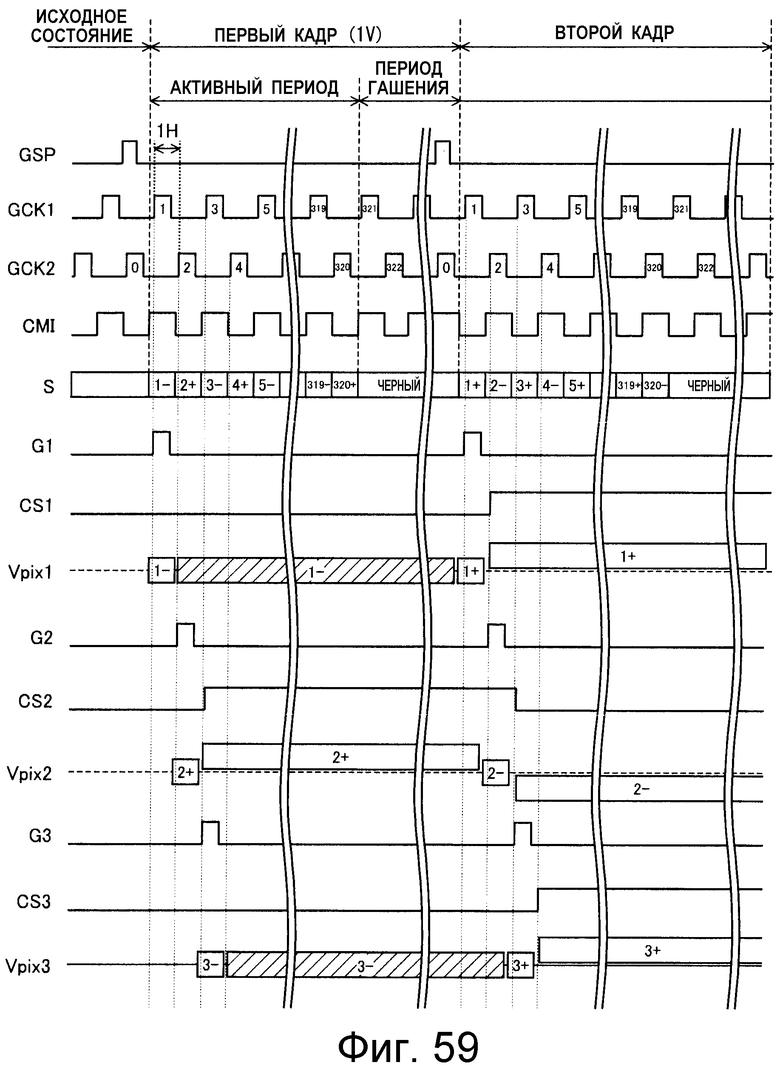
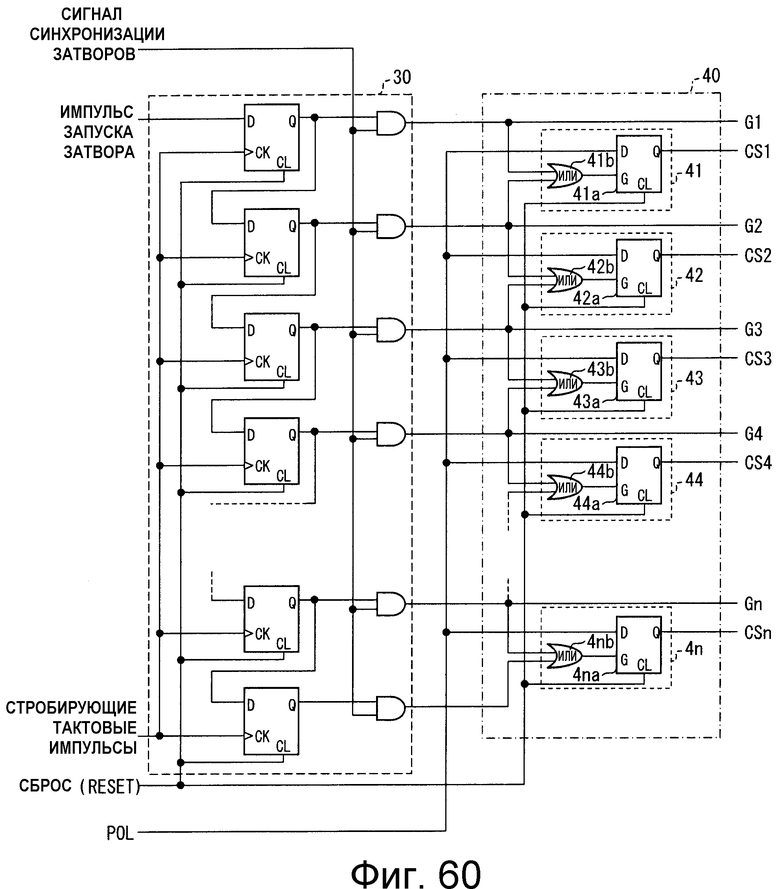
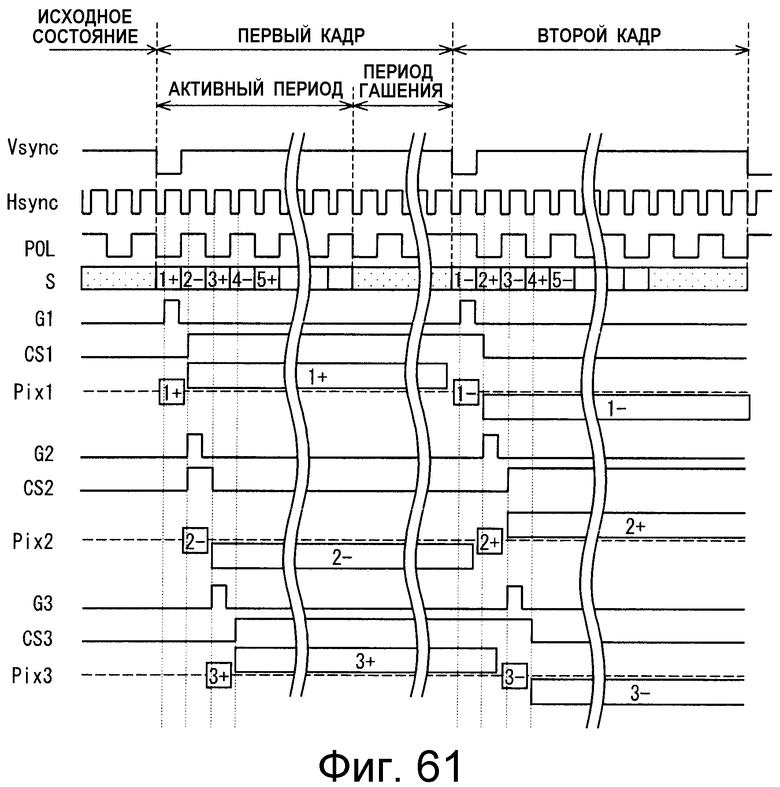
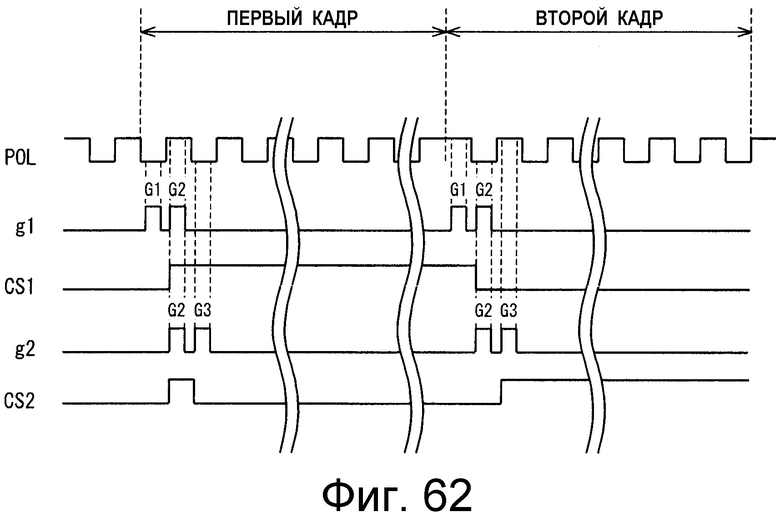
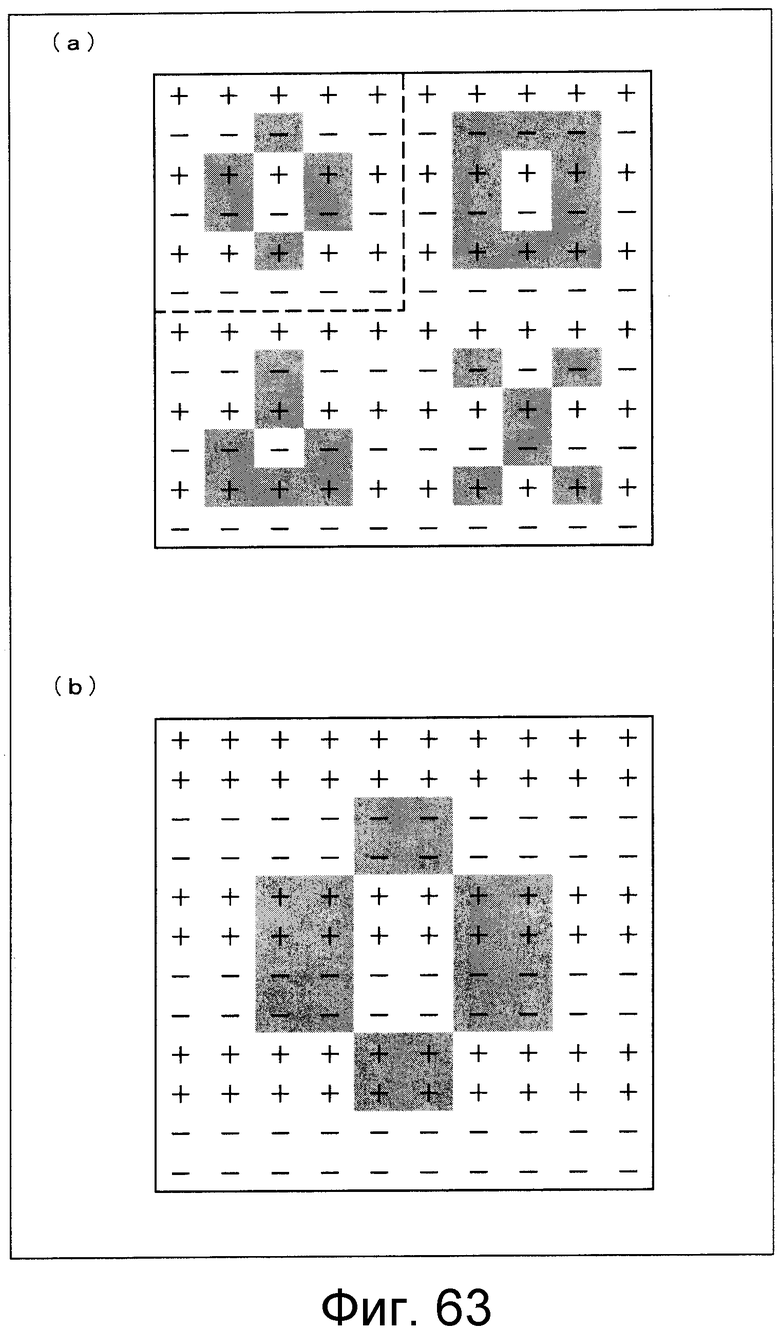
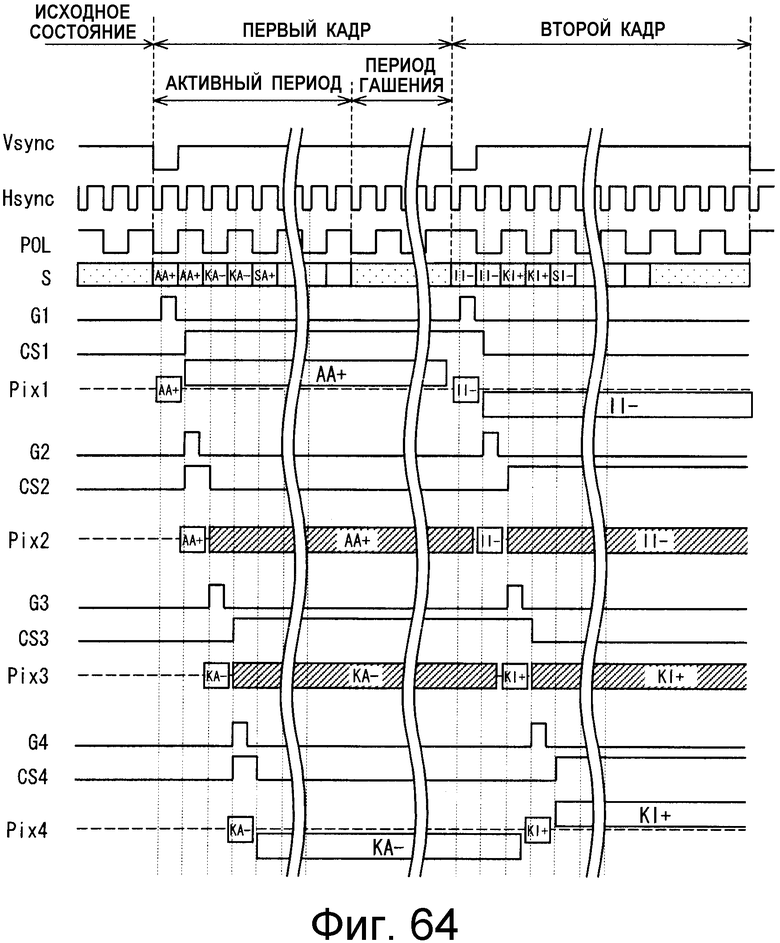
Изобретение относится к средствам управления жидкокристаллическими устройствами отображения. Техническим результатом является повышение качества отображения за счет устранения чередующихся ярких и темных поперечных полос, возникающих при подаче на устройство видеосигнала с преобразованной разрешающей способностью. В способе, когда разрешающая способность видеосигнала преобразована с коэффициентом n (где n - целое число, равное двум или больше), вдоль столбцов на электроды пикселей, соответствующих n смежным шинам сигнала развертки и являющихся смежными друг с другом вдоль столбцов, подают потенциалы сигналов одинаковой полярности и одинакового уровня серого, изменяют направления изменения потенциалов сигналов, записанных в электроды пикселей с шин сигнала передачи данных каждые n смежных строк, в соответствии с полярностями потенциалов сигналов. 3 н. и 8 з.п. ф-лы, 64 ил.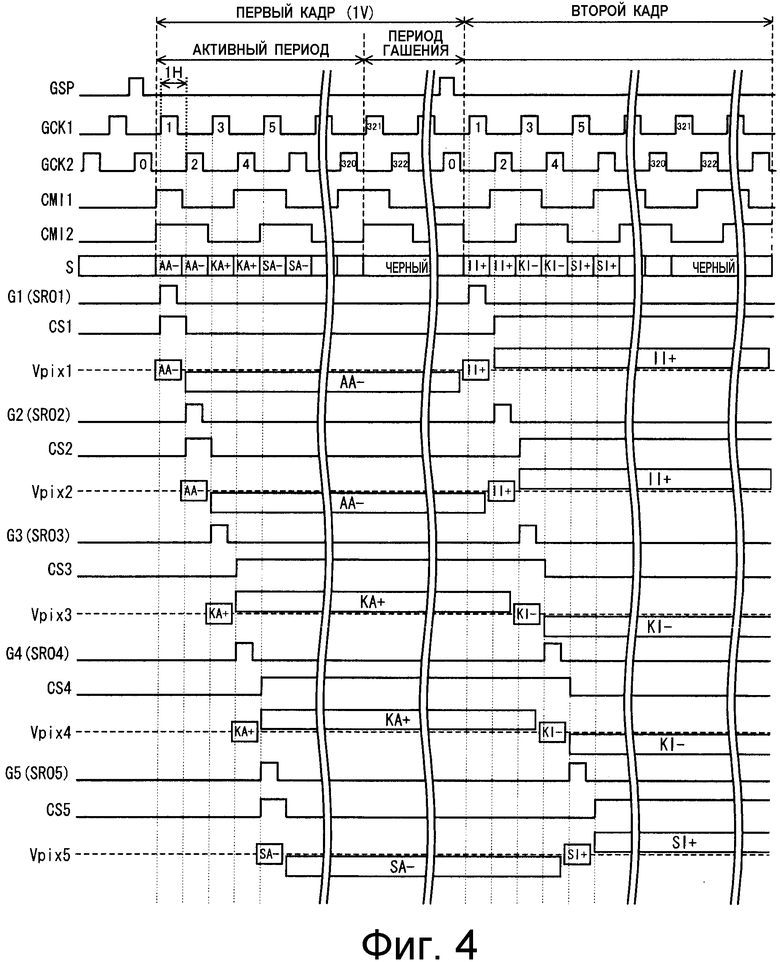
1. Схема управления отображением для использования в устройстве отображения, (i) которое выполняет отображение на основании видеосигнала, разрешающая способность которого была преобразована в более высокую разрешающую способность, и (ii) в котором посредством подачи сигналов проводника конденсаторов удержания на проводники конденсаторов удержания, образующие конденсаторы с электродами пикселей, содержащимися в пикселях, потенциалы сигналов, записанные в электроды пикселей с шин сигнала передачи данных, изменены в направлении, соответствующем полярностям потенциалов сигналов,
в которой, предполагая, что направлением, в котором продолжаются шины сигнала развертки, является направление вдоль строк, когда разрешающая способность видеосигнала преобразована с коэффициентом n (где n - целое число, равное двум или большее), по меньшей мере, в направлении вдоль столбцов, на электроды пикселей, содержащиеся в соответственных n пикселях, которые соответствуют n смежным шинам сигнала развертки и которые являются смежными друг с другом в направлении вдоль столбцов, поданы потенциалы сигналов, имеющие одинаковую полярность и одинаковый уровень серого, и
направление изменения потенциалов сигналов, записанных в электроды пикселей с шин сигнала передачи данных, изменено каждые n смежных строк в соответствии с полярностями потенциалов сигналов.
2. Схема управления отображением по п.1, содержащая сдвиговый регистр, включающий в себя множество каскадов, созданных таким образом, что они соответствуют множеству шин сигнала развертки соответственно,
причем эта схема управления отображением содержит удерживающие цепи, созданные таким образом, что они поочередно соответствуют соответственным каскадам сдвигового регистра, при этом целевой сигнал удержания введен в каждую из удерживающих цепей,
при этом выходной сигнал из текущего каскада и выходной сигнал из последующего каскада, который следует после текущего каскада, введен в логическую схему, соответствующую текущему каскаду,
когда выходной сигнал из логической схемы становится активным, то удерживающая цепь, соответствующая текущему каскаду, загружает и удерживает целевой сигнал удержания,
при этом выходной сигнал из текущего каскада подан на шину сигнала развертки, соединенную с пикселями, соответствующими текущему каскаду, а выходной сигнал из удерживающей цепи, соответствующей текущему каскаду, подан в качестве сигнала проводника конденсаторов удержания на проводник конденсаторов удержания, который образует конденсаторы с электродами пикселей, соответствующими текущему каскаду, а
целевой сигнал удержания, который введен во множество удерживающих цепей, и целевой сигнал удержания, который введен в другое множество удерживающих цепей, отличаются по фазе друг от друга.
3. Схема управления отображением по п.1, содержащая сдвиговый регистр, включающий в себя множество каскадов, созданных таким образом, что они соответствуют множеству шин сигнала развертки соответственно,
причем эта схема управления отображением содержит удерживающие цепи, созданные таким образом, что они поочередно соответствуют соответственным каскадам сдвигового регистра, при этом в каждую из удерживающих цепей введен целевой сигнал удержания,
при этом выходной сигнал из текущего каскада и выходной сигнал из последующего каскада, который следует после следующего каскада, введен в логическую схему, соответствующую текущему каскаду,
когда выходной сигнал из логической схемы становится активным, то удерживающая цепь, соответствующая текущему каскаду, загружает и удерживает целевой сигнал удержания, и
выходной сигнал из текущего каскада подан на шину сигнала развертки, соединенную с пикселями, соответствующими текущему каскаду, а выходной сигнал из удерживающей цепи, соответствующей текущему каскаду, подан в качестве сигнала проводника конденсаторов удержания на проводник конденсаторов удержания, который образует конденсаторы с электродами пикселей, соответствующими текущему каскаду.
4. Схема управления отображением по п.2 или 3, в которой:
каждая из удерживающих цепей удерживает целевой сигнал удержания во время, когда выходной сигнал из одного из множества каскадов в сдвиговом регистре становится активным, и во время, когда выходной сигнал из другого одного из множества каскадов в сдвиговом регистре становится активным; и
целевой сигнал удержания представляет собой сигнал, который изменяет свою полярность на обратную при заданной привязке по времени, и (i) полярность целевого сигнала удержания в тот момент времени, когда выходной сигнал, который выведен из текущего каскада и введен в логическую схему, становится активным, и (ii) полярность целевого сигнала удержания в тот момент времени, когда выходной сигнал, который выведен из последующего каскада и введен в логическую схему, становится активным, являются различными.
5. Схема управления отображением по п.2, в которой в отношении двух удерживающих цепей, которые осуществляют удержание в течение одного и того же периода строчной развертки, одна из этих двух удерживающих цепей принимает первый целевой сигнал удержания, а другая принимает второй целевой сигнал удержания.
6. Схема управления отображением по п.5, в которой первый и второй целевые сигналы удержания изменяют свои полярности на обратные в соответственные разные привязки по времени.
7. Схема управления отображением по п. 2 или 3, в которой:
удерживающая цепь, соответствующая текущему каскаду, включает в себя первую секцию ввода, через которую удерживающая цепь принимает выходной сигнал из текущего каскада сдвигового регистра, вторую секцию ввода, через которую удерживающая цепь принимает целевой сигнал удержания, и секцию вывода, через которую удерживающая цепь выводит сигнал проводника конденсаторов удержания на проводник конденсаторов удержания, соответствующий текущему каскаду;
удерживающая цепь выводит в качестве первого электрического потенциала сигнала проводника конденсаторов удержания первый электрический потенциал целевого сигнала удержания, принятого удерживающей цепью через вторую секцию ввода, когда выходной сигнал, принятый удерживающей цепью из текущего каскада через первую секцию ввода, стал активным;
в течение промежутка времени, в котором выходной сигнал, принятый удерживающей цепью из текущего каскада через первую секцию ввода, является активным, электрический потенциал сигнала проводника конденсаторов удержания изменяется в соответствии с изменением электрического потенциала целевого сигнала удержания, принятого удерживающей цепью через вторую секцию ввода; и
удерживающая цепь выводит в качестве второго электрического потенциала сигнала проводника конденсаторов удержания второй электрический потенциал целевого сигнала удержания, принятого удерживающей цепью через вторую секцию ввода, когда выходной сигнал, принятый удерживающей цепью из текущего каскада через первую секцию ввода, стал неактивным.
8. Схема управления отображением по п.2 или 3, в которой:
выходной сигнал из m-го каскада сдвигового регистра и выходной сигнал из (m+n)-го каскада сдвигового регистра подан в логическую схему, соответствующую m-му каскаду; и
полярность целевого сигнала удержания, поданного в m-ю удерживающую цепь, изменена на обратную каждые n периодов строчной развертки.
9. Схема управления отображением по любому из пп.2, 3, 5 и 6, в которой каждая из удерживающих цепей сформирована как схема D-триггера или запоминающая схема.
10. Устройство отображения, содержащее:
схему управления отображением по любому из пп.1-9; и
панель отображения.
11. Способ управления отображением для управления устройством отображения, (i) которое выполняет отображение на основании видеосигнала, разрешающая способность которого была преобразована в более высокую разрешающую способность, и (ii), в котором посредством подачи сигналов проводника конденсаторов удержания на проводники конденсаторов удержания, образующие конденсаторы с электродами пикселей, содержащимися в пикселях, потенциалы сигналов, записанные в электроды пикселей с шин сигнала передачи данных, изменяют в направлении, соответствующем полярностям потенциалов сигналов,
причем упомянутый способ содержит этапы, на которых:
когда разрешающая способность видеосигнала преобразована с коэффициентом n (где n - целое число, равное двум или больше), по меньшей мере, в направлении вдоль столбцов, на электроды пикселей, содержащиеся в соответственных n пикселях, которые соответствуют n смежным шинам сигнала развертки и которые являются смежными друг с другом в направлении вдоль столбцов, подают потенциалы сигналов, имеющие одинаковую полярность и одинаковый уровень серого, предполагая, что направлением, в котором продолжаются шины сигнала развертки, является направление вдоль строк; и
вызывают изменение направления изменения потенциалов сигналов, записанных в электроды пикселей с шин сигнала передачи данных, каждые n смежных строк в соответствии с полярностями потенциалов сигналов.
| JPH 07230077 A, 29.08.1995 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| JP 2009069562 A, 02.04.2009 | |||
| RU 2005129952 A, 10.04.2007 | |||
| RU 2005129849 A, 10.04.2007 | |||
| СПОСОБ УДАЛЕНИЯ АЗОТА ИЗ ПОРЦИИ СЖИЖЕННОЙ СМЕСИ УГЛЕВОДОРОДОВ | 1992 |
|
RU2085815C1 |

