Область техники, к которой относится изобретение
Изобретение относится к передаче данных и, в частности, к компенсации фазовой ошибки приемного сигнала.
Уровень техники
В системах передачи данных сигналы, передаваемые с передатчика на приемник, часто модулируются согласно одной из различных схем модуляции. Если демодулятору на приемнике требуется выявить несущую приемного сигнала, то можно учитывать частотные искажения между гетеродином передатчика и гетеродином приемника. Например, приемник может оценивать и ослаблять частотные искажения и фазовый шум гетеродинов для повышения эффективности восстановления приемного сигнала.
Для оценивания и ослабления искажений и шума можно применять различные цифровые методы. Например, можно вставлять известные символы между символами данных в передаче, которые используются на стороне приемника для оценивания фазовых и частотных оценок. Например, такие известные символы называются пилотными символами. Однако если, например, на работу гетеродина оказывает влияние возросший фазовый шум, производительность такого метода снижается. Кроме того, если используется формат модуляции более высокого порядка, производительность такого метода может оказаться недостаточной. Для повышения производительности описанного метода можно увеличить количество пилотных символов. Однако это может привести к снижению эффективности использования спектра.
Еще один возможный метод предусматривает использование цепи с обратной связью, которая может включать в себя цепь фазовой синхронизации для уточнения оценивания символов данных. Однако такие цепи с обратной связью могут демонстрировать снижение производительности при увеличении фазового шума.
Раскрытие изобретения
Задачей настоящего изобретения является обеспечение эффективной концепции для компенсации фазовой ошибки приемного сигнала.
Эта задача достигается за счет признаков независимых пунктов формулы изобретения. Дополнительные варианты осуществления явствуют из зависимых пунктов формулы изобретения.
Настоящее изобретение основано на том факте, что для эффективного определения фазовой ошибки приемного сигнала можно использовать структуру положительной обратной связи на основе прямого принятия решения. Например, значение, в частности комплексное значение приемного сигнала, можно отображать в отображенное значение, например комплексную точку звездной диаграммы схемы модуляции, например квадратурной амплитудной модуляции, QAM и т.п. При наличии фазовой ошибки в приемном сигнале, значение приемного сигнала и отображенное значение отличаются и, совместно, несут информацию о фазовой ошибке. Объединяя значение и отображенное значение, например посредством комплексного умножения, можно оценивать или извлекать фазовую ошибку из результата объединения. Оцененную фазовую ошибку можно использовать для коррекции или компенсации приемного сигнала.
Согласно первому аспекту, изобретение относится к устройству компенсации фазовой ошибки для компенсации фазовой ошибки приемного сигнала. Устройство компенсации фазовой ошибки содержит первый модуль компенсации фазовой ошибки и второй модуль компенсации фазовой ошибки, размещенный после первого модуля компенсации фазовой ошибки. Первый модуль компенсации фазовой ошибки выполнен с возможностью получения первой оцененной фазовой ошибки приемного сигнала на основании значения приемного сигнала и заранее заданного значения пилот-сигнала для осуществления сдвига фазы приемного сигнала на величину первой оцененной фазовой ошибки и для подачи сдвинутого по фазе приемного сигнала на второй модуль компенсации фазовой ошибки. Второй модуль компенсации фазовой ошибки содержит элемент задержки для внесения задержки в сдвинутый по фазе приемный сигнал, модуль оценивания фазовой ошибки для обеспечения второй оцененной фазовой ошибки сдвинутого по фазе приемного сигнала и фазовращатель для осуществления сдвига фазы задержанного сдвинутого по фазе приемного сигнала на величину второй оцененной фазовой ошибки. Модуль оценивания фазовой ошибки содержит двусторонний ограничитель для отображения значения сдвинутого по фазе приемного сигнала в отображенное значение, модуль комплексного сопряжения для осуществления комплексного сопряжения одного из отображенного значения и значения сдвинутого по фазе приемного сигнала для получения сопряженного выходного значения и необработанного выходного значения, модуль умножения для умножения сопряженного выходного значения и необработанного выходного значения модуля комплексного сопряжения для получения отличительного значения и модуль определения фазы для определения фазы отличительного значения для получения второй оцененной фазовой ошибки.
Соответственно в устройстве компенсации фазовой ошибки согласно первому аспекту изобретения, второй модуль компенсации фазовой ошибки, например, подключен последовательно к первому модулю компенсации фазовой ошибки. Например, фазовая ошибка приемного сигнала сначала компенсируется путем вращения приемного сигнала, в частности значения приемного сигнала, на величину первой оцененной фазовой ошибки и затем вращается на величину второй оцененной фазовой ошибки модуля оценивания фазовой ошибки. В частности, оценивание фазовой ошибки второго модуля компенсации фазовой ошибки осуществляется на сдвинутом по фазе выходном сигнале первого модуля компенсации фазовой ошибки.
В модуле комплексного сопряжения осуществляется комплексное сопряжение одного из значений, тогда как оставшееся значение не изменяется. Если фаза значения приемного сигнала и фаза отображенного значения равны, результат умножения, а именно отличительное значение, является действительным числом, не имеющим мнимой части. Следовательно, модуль определения фазы может определить нулевую фазовую ошибку. Однако если значение приемного сигнала и отображенное значение отличаются своими фазами, отличительное значение как результат умножения будет иметь мнимую часть. Фазовую ошибку приемного сигнала, в частности мгновенную фазовую ошибку, можно определить путем вычисления фазы отличительного значения. Соответственно, можно без особого труда определить вторую фазовую ошибку.
Такое устройство компенсации фазовой ошибки позволяет корректировать или, по меньшей мере, частично корректировать фазовую ошибку приемного сигнала для обеспечения, например, более точного определения символов данных, включенных в приемный сигнал. Используя модуль оценивания фазовой ошибки, включенный в первый аспект изобретения, можно эффективно оценивать вторую фазовую ошибку. С помощью фазовращателя осуществляется вращение приемного сигнала, в частности в комплексной плоскости, для компенсации фазовой ошибки. Второй модуль компенсации фазовой ошибки также можно называть модулем упреждающей компенсации фазовой ошибки.
Согласно первой форме реализации первого аспекта, изобретение относится к устройству компенсации фазовой ошибки, в котором модуль оценивания фазовой ошибки дополнительно включает в себя фильтр для фильтрации выходного значения модуля определения фазы для получения оцененной фазовой ошибки. Следовательно, прежние выходные значения модуля определения фазы можно взвешивать для получения оцененной фазовой ошибки.
Фильтр может, например, включать в себя фильтр низких частот. Следовательно, точное отклонение выходного значения можно усреднять в оцененной фазовой ошибке. Фильтр может, например, включать в себя фильтр скользящего среднего. При наличии фильтра скользящего среднего можно вычислять среднее по отдельному количеству прежних выходных значений для получения оцененной фазовой ошибки, причем прежние выходные значения можно взвешивать по-разному. Согласно некоторым формам реализации, фильтр может включать в себя одинаковые весовые коэффициенты для выходных значений модуля определения фазы. В этих случаях оцененная фазовая ошибка соответствует среднему значению прежних выходных значений. Фильтр можно реализовать в виде фильтра конечной импульсной характеристики, КИХ.
Согласно второй форме реализации первого аспекта, изобретение относится к устройству компенсации фазовой ошибки, в котором фазовращатель включает в себя модуль комплексного умножения для умножения значения сдвинутого по фазе задержанного приемного сигнала на значение ошибки, причем значение ошибки определяется комплексной экспоненциальной функцией второй оцененной фазовой ошибки. Значение ошибки можно, например, определять согласно формуле exp(j∙φFF(t)), где φFF(t) - мгновенное значение второй оцененной фазовой ошибки в момент времени t.
Согласно третьей форме реализации первого аспекта, изобретение относится к устройству компенсации фазовой ошибки, которое дополнительно выполнено с возможностью адаптации времени задержки элемента задержки к времени обработки модуля оценивания фазовой ошибки. Время задержки элемента задержки можно, например, выбирать так, чтобы приемный сигнал задерживался до тех пор, пока вторая фазовая ошибка не будет оценена для мгновенного значения приемного сигнала.
Согласно четвертой форме реализации первого аспекта, изобретение относится к устройству компенсации фазовой ошибки, в котором первый модуль компенсации фазовой ошибки выполнен с возможностью определения значений фазовой ошибки на основании значения приемного сигнала и заранее заданного значения пилот-сигнала в данные моменты времени и получения первой оцененной фазовой ошибки путем интерполяции между значениями фазовой ошибки. Приемный сигнал может, например, включать в себя один или более пилотных символов, которые заранее заданы, и некоторое количество символов данных полезной нагрузки. Затем оцененную фазовую ошибку первого модуля компенсации фазовой ошибки можно интерполировать в моменты времени, в которые символы полезной нагрузки передаются в приемном сигнале, путем интерполяции между значениями фазовой ошибки, определенными для моментов времени, в которые пилотные символы передаются в приемном сигнале. Интерполяция может быть, например, линейной интерполяцией или интерполяцией более высокого порядка.
Согласно пятой форме реализации первого аспекта, изобретение относится к устройству компенсации фазовой ошибки, которое включает в себя дополнительный двусторонний ограничитель, размещенный после второго модуля компенсации фазовой ошибки для отображения значения сигнала на входе дополнительного двустороннего ограничителя в отображенное значение на выходе дополнительного двустороннего ограничителя, и модуль компенсации фазовой ошибки обратной связи. Модуль компенсации фазовой ошибки обратной связи выполнен с возможностью получения фазовой ошибки обратной связи на основании значения разности между значением на входе дополнительного двустороннего ограничителя и отображенным значением на выходе дополнительного двустороннего ограничителя и осуществления сдвига фазы приемного сигнала на величину фазовой ошибки обратной связи для получения сигнала на входе дополнительного двустороннего ограничителя. Соответственно ошибка отображения на дополнительном двустороннем ограничителе оценивается в тракте обратной связи для определения фазовой ошибки, а именно фазовой ошибки обратной связи, которая используется для вращения приемного сигнала до подачи его на дополнительный двусторонний ограничитель.
Часть обратной связи модуля компенсации фазовой ошибки обратной связи может быть, например, основана на цепи фазовой синхронизации, ФАПЧ, в которой информация фазы ФАПЧ используется для компенсации приемного сигнала. Модуль компенсации фазовой ошибки обратной связи может, например, включать в себя фазовый детектор и контурный фильтр, на которые поступает значение разности для получения фазовой ошибки обратной связи. Выходной сигнал контурного фильтра может поступать на генератор, управляемый напряжением, ГУН, который может действовать как интегратор или, для цифровой схемы, как накопитель. Выходным сигналом ГУН может быть значение фазы, которое используется в качестве фазовой ошибки обратной связи.
Согласно шестой форме реализации первого аспекта, изобретение относится к устройству компенсации фазовой ошибки, содержащему еще один модуль компенсации фазовой ошибки, размещенный последовательно со вторым модулем компенсации фазовой ошибки. Еще один модуль компенсации фазовой ошибки включает в себя еще один модуль оценивания фазовой ошибки, как описано выше, для модуля оценивания фазовой ошибки второго модуля компенсации фазовой ошибки. Соответственно фазовая ошибка приемного сигнала может снижаться на нескольких ступенях, а именно первого модуля компенсации фазовой ошибки, второго модуля компенсации фазовой ошибки и еще одного модуля компенсации фазовой ошибки.
Еще один модуль компенсации фазовой ошибки может, например, включать в себя элемент задержки для внесения задержки во входной сигнал еще одного модуля компенсации фазовой ошибки, еще один модуль оценивания фазовой ошибки для обеспечения еще одной оцененной фазы входного сигнала и фазовращатель для осуществления сдвига фазы задержанного входного сигнала на величину еще одной оцененной фазовой ошибки.
Соответственно еще один модуль оценивания фазовой ошибки может содержать еще один двусторонний ограничитель для отображения значения входного сигнала в отображенное значение, еще один модуль комплексного сопряжения для осуществления комплексного сопряжения одного отображенного значения и значения входного сигнала для получения еще одного сопряженного выходного значения и еще одного необработанного выходного значения, еще один модуль умножения для умножения еще одного сопряженного выходного значения и еще одного необработанного выходного значения еще одного модуля комплексного сопряжения для получения еще одного отличительного значения и еще один модуль определения фазы для определения фазы еще одного отличительного значения для получения еще одной оцененной фазовой ошибки.
Согласно второму аспекту, изобретение относится к способу компенсации фазовой ошибки для компенсации фазовой ошибки приемного сигнала. Согласно способу компенсации фазовой ошибки, первая оцененная фазовая ошибка приемного сигнала получается на основании значения приемного сигнала и заранее заданного значения пилот-сигнала, и фаза приемного сигнала сдвигается на величину первой оцененной фазовой ошибки. Кроме того, значение сдвинутого по фазе приемного сигнала отображается в отображенное значение. Одно из отображенных значений и значение сдвинутого по фазе приемного сигнала подвергаются комплексному сопряжению для получения сопряженного выходного значения и необработанного выходного значения. Сопряженное выходное значение и необработанное выходное значение перемножаются для получения отличительного значения. Фаза отличительного значения определяется для получения второй оцененной фазовой ошибки. Сдвинутый по фазе приемный сигнал задерживается. Фаза задержанного сдвинутого по фазе приемного сигнала сдвигается на величину второй оцененной фазовой ошибки.
Согласно некоторым формам реализации второго аспекта, получение оцененной фазовой ошибки включает в себя фильтрацию отличительного значения. Кроме того, формы реализации второго аспекта берут начало из различных форм реализации первого аспекта изобретения.
Краткое описание чертежей
Дополнительные варианты осуществления изобретения будут описаны со ссылкой на следующие фигуры, в которых:
Фиг. 1 - модуль оценивания фазовой ошибки согласно форме реализации;
Фиг. 2 - модуль компенсации фазовой ошибки согласно форме реализации;
Фиг. 3 - устройство компенсации фазовой ошибки согласно форме реализации;
Фиг. 4 - устройство компенсации фазовой ошибки согласно форме реализации;
Фиг. 5 - подробная схема модуля компенсации фазовой ошибки обратной связи согласно форме реализации и
Фиг. 6 - устройство компенсации фазовой ошибки согласно форме реализации.
Осуществление изобретения
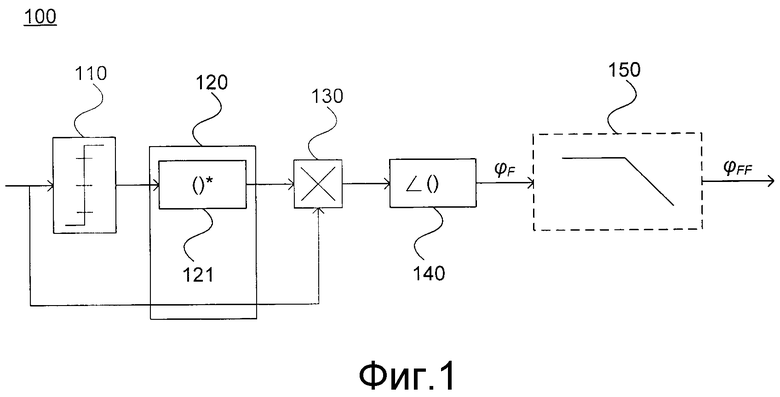
На Фиг. 1 показана форма реализации модуля 100 оценивания фазовой ошибки. Модуль 100 оценивания фазовой ошибки содержит двусторонний ограничитель 110, подключенный ко входу модуля оценивания фазовой ошибки и модуля 120 комплексного сопряжения, входная сторона которого подключена к выходу двустороннего ограничителя 110 и ко входу модуля оценивания фазовой ошибки. Модуль 120 комплексного сопряжения включает в себя блок 121 комплексного сопряжения для осуществления комплексного сопряжения своего входного сигнала. Выходы модуля 120 комплексного сопряжения подключены к модулю 130 комплексного умножения. Выход модуля 130 умножения подключен к модулю 140 определения фазы, после которого размещен фильтр 150.
Двусторонний ограничитель 110 выполнен с возможностью отображения значения приемного сигнала на своем входе в отображенное значение на своем выходе. Приемный сигнал может представлять собой дискретизированный и преобразованный с понижением частоты сигнал радиочастоты, который может состоять из модулированных символов, например символов, подвергнутых квадратурной амплитудной модуляции, QAM.
Например, двусторонний ограничитель 110 сравнивает приемный сигнал с некоторым количеством порогов и осуществляет отображение в отображенное значение на основании результатов сравнения. Например, двусторонний ограничитель 110 осуществляет двухмерную операцию в комплексной плоскости для отображения значения приемного сигнала в одну из заранее заданного количества точек звездной диаграммы схемы модуляции.
Выходной сигнал двустороннего ограничителя 110 с отображенным значением и необработанный приемный сигнал с необработанным значением поступают на модуль 120 комплексного сопряжения, который осуществляет комплексное сопряжение одного из двух своих входных сигналов. В форме реализации, показанной на Фиг. 1, отображенное значение комплексно сопрягается элементом 121 комплексного сопряжения, тогда как приемный сигнал остается необработанным. Однако, согласно другим формам реализации, можно также осуществлять комплексное сопряжение приемного сигнала и оставлять необработанным выходной сигнал двустороннего ограничителя 110.
Выходные сигналы модуля 120 комплексного сопряжения, а именно сопряженное выходное значение и необработанное выходное значение, поступают на модуль 130 умножения для осуществления комплексного умножения, в результате которого получается отличительное значение, поступающее на модуль 140 определения фазы. Модуль 140 определения фазы определяет комплексную фазу φF отличительного значения, например, согласно

где H - комплексное отличительное значение, выдаваемое модулем 130 умножения.
Значение фазы φF поступает на фильтр 150 для получения оцененной фазовой ошибки φFF приемного сигнала. Фильтр 150 может представлять собой фильтр скользящего среднего, например КИХ фильтр, имеющую низкочастотную передаточную функцию. Длина фильтра для фильтра 150 может составлять порядка десяти отводов фильтра. Коэффициенты такого КИХ фильтра могут быть все одинаковы для достижения среднеквадратического значения фазы φF, или же КИХ фильтр может иметь коэффициенты, адаптированные к нужной передаточной функции фильтра. Равновзвешенный фильтр реализовать проще. Например, для получения оцененной фазовой ошибки φFF последние N значений фазы φF можно суммировать и разделить на N.
Согласно некоторым формам реализации, фильтр 150 может не входить в состав модуля 100 оценивания фазовой ошибки. Соответственно значение фазы φF можно непосредственно использовать в качестве оцененной фазовой ошибки φFF.
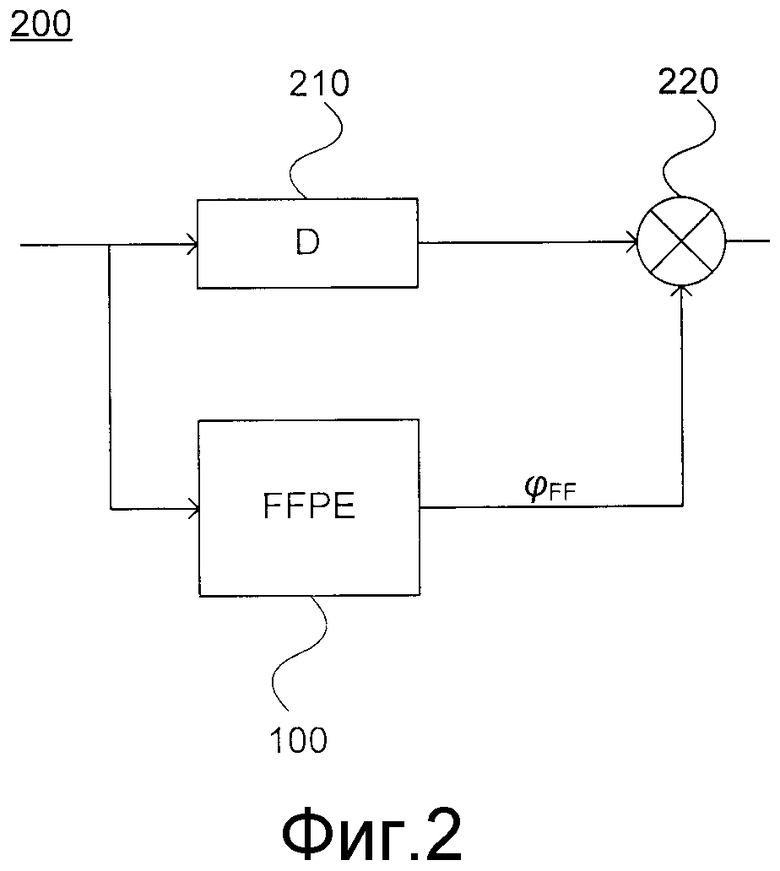
На Фиг. 2 показана реализация модуля 200 компенсации фазовой ошибки, который содержит элемент 210 задержки, фазовращатель 220 и модуль 100 оценивания фазовой ошибки согласно форме реализации, показанной на Фиг. 1. В модуле 200 компенсации фазовой ошибки приемный сигнал поступает на элемент 210 задержки для внесения задержки в приемный сигнал. Приемный сигнал дополнительно поступает на модуль 100 оценивания фазовой ошибки, который также можно именовать модулем упреждающего оценивания фазовой ошибки, FFPE, для получения оцененной фазовой ошибки φFF приемного сигнала. Фазовращатель 220 выполнен с возможностью сдвига фазы задержанного приемного сигнала, а именно выходного сигнала элемента 210 задержки, на величину оцененной фазовой ошибки для компенсации фазовой ошибки в приемном сигнале. Например, фазовращатель 220 включает в себя модуль комплексного умножения для умножения значения задержанного приемного сигнала на значение ошибки. Значение ошибки может определяться комплексной экспоненциальной функцией оцененной фазовой ошибки φFF, например exp(j∙φFF(t)), где φFF(t) - мгновенное значение оцененной фазовой ошибки.
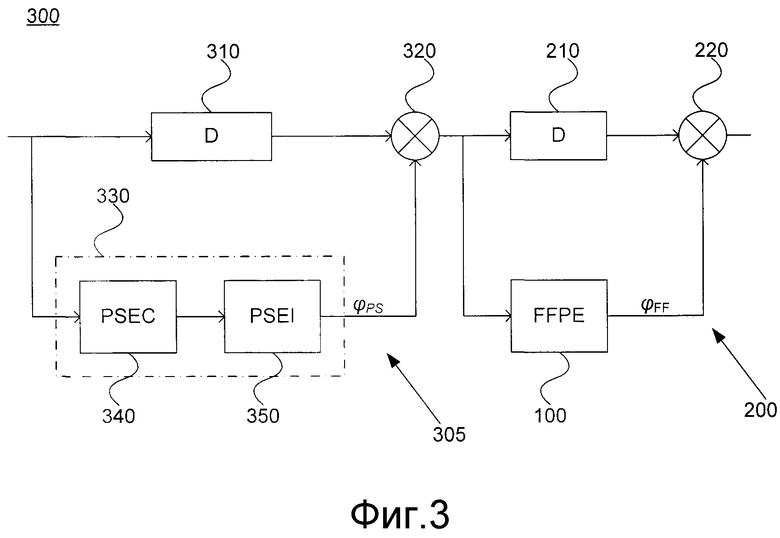
На Фиг. 3 показана форма реализации устройства 300 компенсации фазовой ошибки, которое включает в себя модуль 200 компенсации фазовой ошибки, показанный на Фиг. 2, и дополнительный модуль 305 компенсации фазовой ошибки, размещенный до модуля 200 компенсации фазовой ошибки. Дополнительный модуль 305 компенсации фазовой ошибки содержит элемент 310 задержки, фазовращатель 320 и модуль 330 оценивания фазовой ошибки на основе пилотных символов. Модуль 330 оценивания фазовой ошибки на основе пилотных символов, PSPE, содержит блок 340 вычисления ошибки пилотного символа, PSEC, и блок 350 интерполяции ошибки пилотного символа, PSEI. Блок 340 вычисления ошибки пилотного символа способен выявлять заранее заданные пилотные символы в приемном сигнале, вставленные в приемный сигнал в данные моменты времени между символами полезной нагрузки, и вычислять отклонение фазы между значением приемного сигнала и значением заранее заданного пилотного символа. Например, в данные моменты времени, определяются значения фазовой ошибки, которые поступают на интерполятор 350 фазовой ошибки на основе пилотных символов. Интерполятор 350 осуществляет интерполяцию между значениями фазовой ошибки для моментов времени, в которые пилотные символы отсутствуют в приемном сигнале. Следовательно, изменяющаяся со временем оценка фазовой ошибки φPS вычисляется интерполятором 350 и поступает на фазовращатель 320, функция которого аналогична или идентична функции фазовращателя 220. Соответственно приемный сигнал, задержанный элементом 310 задержки, подвергается сдвигу фазы или вращению на величину оцененной фазовой ошибки φPS и поступает на первый модуль 200 компенсации фазовой ошибки.
На Фиг. 4 показана дополнительная форма реализации устройства 400 компенсации фазовой ошибки, которое, например, построено на основе устройства 300, показанного на Фиг. 3. Устройство, показанное на Фиг. 4, дополнительно содержит дополнительный двусторонний ограничитель 410, размещенный после фазовращателя 220. Входной сигнал дополнительного двустороннего ограничителя 410 и выходной сигнал дополнительного двустороннего ограничителя 410 поступают на блок 420 вычисления разности, который подключен к модулю 430 оценивания фазовой ошибки обратной связи, FBPE. В частности, выход блока 420 вычисления разности подключен к входу 431 модуля 430 оценивания фазовой ошибки обратной связи. Выход 432 модуля 430 оценивания фазовой ошибки обратной связи подключен к блоку 440 суммирования, выход которого подключен к фазовращателю 220.
Функция дополнительного двустороннего ограничителя 410 аналогична функции двустороннего ограничителя 110, а именно отображение значения на входе двустороннего ограничителя 410 в отображенное значение на выходе двустороннего ограничителя 410, которое осуществляется, например, на основании нескольких порогов. Блок 420 вычисления разности вычисляет разность между входным значением и отображенным значением и выдает ее на модуль 430 оценивания фазовой ошибки обратной связи, который может быть выполнен, например, на основе схемы ФАПЧ. Значение фазы φPLL обратной связи поступает на блок 440 суммирования совместно с оцененной фазовой ошибкой φFF модуля 100 оценивания фазовой ошибки. Фазовращатель 220 осуществляет вращение приемного сигнала на основании суммы двух значений фазовой ошибки φFF и φPLL. Блоки 420 и 430 входят в состав модуля компенсации фазовой ошибки обратной связи, что может дополнительно повышать производительность вышеописанной компенсации фазовой ошибки.
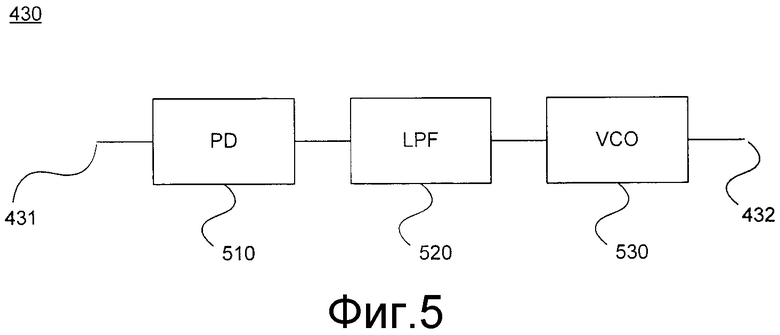
Согласно Фиг. 5, модуль 320 оценивания фазовой ошибки обратной связи может содержать фазовый детектор 510, контурный фильтр 520, подключенный к выходу фазового детектора 510, и ГУН 530, действующий под управлением выходного сигнала контурного фильтра 520. В частности, значение фазы выходного сигнала ГУН 530 можно использовать в качестве фазовой ошибки φPLL обратной связи, которая служит основанием для осуществления сдвига фазы на фазовращателе 220.
Согласно некоторым формам реализации, модуль 200 компенсации фазовой ошибки, показанный на Фиг. 2 или 3, можно заменить или расширить каскад из двух или более идентичных или аналогичных компенсаторных ступеней.
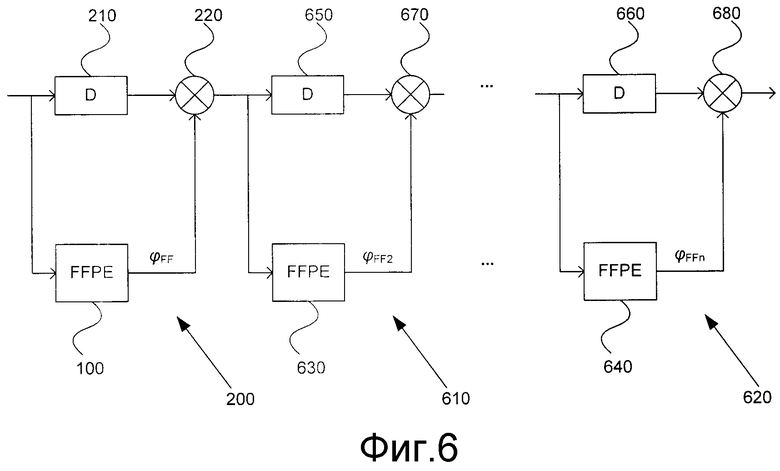
Например, на Фиг. 6 показана форма реализации устройства компенсации фазовой ошибки, в котором модуль 200 компенсации фазовой ошибки последовательно соединен с дополнительным модулем 610 компенсации фазовой ошибки и, возможно, еще одним модулем 620 компенсации фазовой ошибки. Модули 610, 620 компенсации фазовой ошибки могут быть реализованы идентично или аналогично модулю 200 компенсации фазовой ошибки. В частности, компенсаторы 610, 620 могут содержать модули 630, 640 оценивания фазовой ошибки, которые осуществляют ту же функцию, что и модуль 100 оценивания фазовой ошибки. Соответственно модуль 630 оценивания фазовой ошибки обеспечивает еще одну оцененную фазовую ошибку φFF2, и модуль оценивания фазовой ошибки 640 обеспечивает еще одну дополнительную оценку фазовой ошибки φFFn. Для компенсации фазовых ошибок компенсаторы 610, 620 содержат элементы 650, 660 задержки и фазовращатели 670, 680.
Благодаря последовательному соединению нескольких аналогичных модулей компенсации фазовой ошибки, в частности, с модулями упреждающего оценивания фазовой ошибки, оставшаяся фазовая ошибка приемного сигнала может снижаться от компенсаторной ступени до компенсаторной ступени.
Согласно некоторым формам реализации, каскад из двух или более модулей компенсации фазовой ошибки согласно форме реализации модуля 200 компенсации фазовой ошибки можно объединить с модулем компенсации фазовой ошибки на основе пилотных символов, показанным на Фиг. 3, подключенным до каскада, и модулем компенсации фазовой ошибки обратной связи, показанным на Фиг. 4, подключенным после каскада.
Однако объединение модуля компенсации фазовой ошибки на основе пилотных символов с каскадом модулей упреждающей компенсации фазовой ошибки на основе прямого принятия решения может обеспечивать достаточную производительность в различных формах реализации.
Описанные устройства можно использовать в различных радиоприемниках или оптических приемниках.
Изобретение относится к передаче данных и может использоваться для компенсации фазовой ошибки приемного сигнала. Достигаемый технический результат - осуществление коррекции фазовой ошибки приемного сигнала для обеспечения более точного определения символов данных, включенных в приемный сигнал. Устройство (300, 400) компенсации фазовой ошибки содержит первый модуль (305) компенсации фазовой ошибки и второй модуль (200) компенсации фазовой ошибки, размещенный после первого модуля (305) компенсации фазовой ошибки, первый модуль (305) компенсации фазовой ошибки выполнен с возможностью получения первой оцененной фазовой ошибки (φPS) приемного сигнала на основании значения приемного сигнала и заранее заданного значения пилот-сигнала, осуществления сдвига фазы приемного сигнала на величину первой оцененной фазовой ошибки (φPS) и подачи сдвинутого по фазе приемного сигнала на второй модуль (200) компенсации фазовой ошибки. 2 н. и 13 з.п. ф-лы, 6 ил.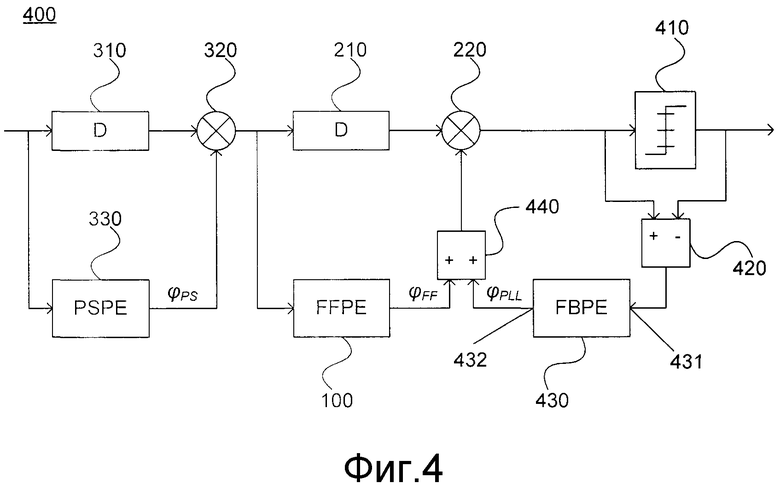
1. Устройство (300, 400) компенсации фазовой ошибки для компенсации фазовой ошибки приемного сигнала, причем устройство (300, 400) компенсации фазовой ошибки содержит первый модуль (305) компенсации фазовой ошибки и второй модуль (200) компенсации фазовой ошибки, размещенный после первого модуля (305) компенсации фазовой ошибки, причем первый модуль (305) компенсации фазовой ошибки выполнен с возможностью получения первой оцененной фазовой ошибки (φPS) приемного сигнала на основании значения приемного сигнала и заранее заданного значения пилот-сигнала для осуществления сдвига фазы приемного сигнала на величину первой оцененной фазовой ошибки (φPS) и для подачи сдвинутого по фазе приемного сигнала на второй модуль (200) компенсации фазовой ошибки, причем второй модуль (200) компенсации фазовой ошибки содержит:
- элемент (210) задержки для внесения задержки в сдвинутый по фазе приемный сигнал,
- модуль (100) оценивания фазовой ошибки для обеспечения второй оцененной фазовой ошибки (φFF) сдвинутого по фазе приемного сигнала и
- фазовращатель (220) для осуществления сдвига фазы задержанного сдвинутого по фазе приемного сигнала на величину второй оцененной фазовой ошибки (φFF),
причем модуль (100) оценивания фазовой ошибки содержит:
- двусторонний ограничитель (110) для отображения значения сдвинутого по фазе приемного сигнала в отображенное значение,
- модуль (120) комплексного сопряжения для осуществления комплексного сопряжения одного из отображенного значения и значения сдвинутого по фазе приемного сигнала для получения сопряженного выходного значения и необработанного выходного значения,
- модуль (130) умножения для умножения сопряженного выходного значения и необработанного выходного значения модуля (120) комплексного сопряжения для получения отличительного значения и
- модуль (140) определения фазы для определения фазы отличительного значения для получения второй оцененной фазовой ошибки (φFF).
2. Устройство (300, 400) компенсации фазовой ошибки по п.1, в котором модуль (100) оценивания фазовой ошибки дополнительно включает в себя фильтр (150) для фильтрации выходного значения (φF) модуля (140) определения фазы для получения второй оцененной фазовой ошибки (φFF).
3. Устройство (300, 400) компенсации фазовой ошибки по п.2, в котором фильтр (150) включает в себя фильтр низких частот, в частности фильтр скользящего среднего.
4. Устройство (300, 400) компенсации фазовой ошибки по п.2, в котором фильтр (150) включает в себя одинаковые весовые коэффициенты для выходных значений модуля (140) определения фазы.
5. Устройство (300, 400) компенсации фазовой ошибки по п.3, в котором фильтр (150) включает в себя одинаковые весовые коэффициенты для выходных значений модуля (140) определения фазы.
6. Устройство (300, 400) компенсации фазовой ошибки по п.1, в котором фазовращатель (220) включает в себя модуль комплексного умножения для умножения значения сдвинутого по фазе задержанного приемного сигнала на значение ошибки, причем значение ошибки определяется комплексной экспоненциальной функцией второй оцененной фазовой ошибки (φFF).
7. Устройство (300, 400) компенсации фазовой ошибки по п.1, дополнительно выполненное с возможностью адаптации времени задержки элемента (210) задержки к времени обработки модуля (100) оценивания фазовой ошибки.
8. Устройство (300, 400) компенсации фазовой ошибки по п.1, в котором первый модуль (305) компенсации фазовой ошибки выполнен с возможностью определения значений фазовой ошибки на основании значения приемного сигнала и заранее заданного значения пилот-сигнала в данные моменты времени и получения первой оцененной фазовой ошибки (φPS) путем интерполяции между значениями фазовой ошибки.
9. Устройство (300, 400) компенсации фазовой ошибки по п.1, включающее в себя дополнительный двусторонний ограничитель (410), размещенный после второго модуля (200) компенсации фазовой ошибки для отображения значения сигнала на входе дополнительного двустороннего ограничителя (410) в отображенное значение на выходе дополнительного двустороннего ограничителя (410), и включающее в себя модуль (420, 430) компенсации фазовой ошибки обратной связи, выполненное с возможностью:
- получения фазовой ошибки обратной связи на основании значения разности между значением на входе дополнительного двустороннего ограничителя (410) и отображенным значением на выходе дополнительного двустороннего ограничителя (410) и
- осуществления сдвига фазы приемного сигнала на величину фазовой ошибки обратной связи (φPLL) для получения сигнала на входе дополнительного двустороннего ограничителя (410).
10. Устройство (300, 400) компенсации фазовой ошибки по п.9, в котором модуль (420, 430) компенсации фазовой ошибки обратной связи включает в себя фазовый детектор (510) и контурный фильтр (520), на которые поступает значение разности для получения фазовой ошибки обратной связи.
11. Устройство (300, 400) компенсации фазовой ошибки по п.1, содержащее еще один модуль (610, 620) компенсации фазовой ошибки, размещенный последовательно со вторым модулем (200) компенсации фазовой ошибки, причем еще один модуль (610, 620) компенсации фазовой ошибки включает в себя еще один модуль (630, 640) оценивания фазовой ошибки по одному из предыдущих пунктов.
12. Устройство (300, 400) компенсации фазовой ошибки по п.11, в котором еще один модуль (610, 620) компенсации фазовой ошибки включает в себя:
- элемент задержки для внесения задержки во входной сигнал еще одного модуля (610, 620) компенсации фазовой ошибки,
- еще один модуль (630, 640) оценивания фазовой ошибки для обеспечения еще одной оцененной фазовой ошибки (φFF2, φFFn) входного сигнала и
- фазовращатель (220) для осуществления сдвига фазы задержанного входного сигнала на величину еще одной оцененной фазовой ошибки (φFF2, φFFn).
13. Устройство (300, 400) компенсации фазовой ошибки по п.12, в котором еще один модуль (630, 640) оценивания фазовой ошибки содержит:
- еще один двусторонний ограничитель для отображения значения входного сигнала в отображенное значение,
- еще один модуль комплексного сопряжения для осуществления комплексного сопряжения одного из отображенного значения и значения входного сигнала для получения еще одного сопряженного выходного значения и еще одного необработанного выходного значения,
- еще один модуль умножения для умножения еще одного сопряженного выходного значения и еще одного необработанного выходного значения еще одного модуля комплексного сопряжения для получения еще одного отличительного значения и
- еще один модуль (140) определения фазы для определения фазы еще одного отличительного значения для получения еще одной оцененной фазовой ошибки (φFF2, φFFn).
14. Способ компенсации фазовой ошибки для компенсации фазовой ошибки приемного сигнала, причем способ оценивания фазовой ошибки содержит этапы, на которых:
- получают первую оцененную фазовую ошибку (φPS) приемного сигнала на основании значения приемного сигнала и заранее заданного значения пилот-сигнала,
- сдвигают фазу приемного сигнала на величину первой оцененной фазовой ошибки (φPS),
- отображают значение сдвинутого по фазе приемного сигнала в отображенное значение,
- осуществляют комплексное сопряжение одного из отображенного значения и значения сдвинутого по фазе приемного сигнала для получения сопряженного выходного значения и необработанного выходного значения,
- перемножают сопряженное выходное значение и необработанное выходное значение для получения отличительного значения,
- определяют фазу отличительного значения для получения второй оцененной фазовой ошибки (φFF),
- задерживают сдвинутый по фазе приемный сигнал и
- сдвигают фазу задержанного сдвинутого по фазе приемного сигнала на величину второй оцененной фазовой ошибки (φFF).
15. Способ по п.14, в котором этап получения второй оцененной фазовой ошибки (φFF) включает в себя этап, на котором осуществляют фильтрацию отличительного значения.
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2003 |
|
RU2244375C1 |
| УСТРОЙСТВО И СПОСОБ СЛЕЖЕНИЯ ЗА РАДИОЧАСТОТОЙ И ЕЕ ЗАХВАТА | 2003 |
|
RU2321955C2 |
| US 5742208 А, 21.04.1998 | |||
| Способ охлаждения сыпучего материала в барабанном холодильнике | 1987 |
|
SU1541473A1 |

