ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к обмену информацией между устройством съемки изображения и сменным объективом, подключаемым к устройству съемки изображения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В патентной литературе PTL 1 раскрывается нижеследующая техническая идея в качестве способа для обмена информацией между камерой, которая используется в качестве устройства съемки изображения, и сменным объективом, подключаемым к камере. В PTL 1 раскрывается способ, который выполняет синхронную последовательную передачу с первой скоростью передачи данных, с которой даже сменный объектив старого типа может осуществлять передачу, и если подключенный сменный объектив рассматривается в качестве нового объектива в отношении содержимого передачи, передача изменяется на синхронную последовательную передачу со второй скоростью передачи данных, которая выше первой скорости передачи данных. В PTL 1 также описывается, что схема для коммуникационного терминала устройства изменяется от типа «с открытым стоком» на тип комплементарной структуры металл-оксид-полупроводник (КМОП, CMOS), подходящий для высокоскоростной передачи, если изменяется скорость передачи данных. Этот способ может обеспечивать конфигурацию, которая может работать в комбинации со сменным объективом старого типа, даже если скорость передачи данных является низкой, и которая может работать в комбинации со сменным объективом нового типа со скоростью передачи данных, которая является повышенной на некоторый уровень.
Список патентной литературы
PTL 1: Патент Японии № 3658084
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
Для повышения объема передачи для коррекции оптических характеристик и повышения скорости непрерывной съемки является желательным улучшить рабочие характеристики устройства снятия изображения и сменного объектива.
В традиционной синхронной последовательной передаче имеется время ожидания, чтобы анализировать данные, принятые объективом, между передачами и устанавливать данные, которые передаются на камеру, согласно следующей передаче, а также чтобы исполнять обработку на основе принятых данных. Состояние в течение времени ожидания называется "Busy" ("занято"). Объектив не принимает передачу от камеры в течение (состояния) Busy.
Вследствие этого, даже если тактовая частота является повышенной, микрокомпьютер в камере осуществляет передачу в то время, как микрокомпьютер ожидает отмены Busy. Улучшение рабочей характеристики ограничено. Между тем камера часто осуществляет прерывание передачи по отношению к микрокомпьютеру в объективе, и объектив должен предпочтительно выполнять обработку прерывания передачи, чтобы выводить сигнал Busy или отменять состояние Busy при всяком возникновении прерывания коммуникации. Это может мешать улучшению рабочей характеристики.
Настоящее изобретение обеспечивает устройство съемки изображения, предоставленное для коммуникации со сменным объективом, который может дополнительно улучшить рабочую характеристику, и для коммуникации со сменным объективом старого типа, который использует традиционный способ коммуникации при поддержании при этом совместимости, а также обеспечивает сменный объектив.
Решение технической задачи изобретения
Для решения задачи устройство съемки изображения, к которому может быть подключен сменный объектив, согласно технической идее настоящей заявки включает в себя первый и второй выводы для коммуникации со сменным объективом; и средство управления коммуникацией, чтобы, если коммуникация осуществляется с подключенным сменным объективом, в синхронной коммуникации, в которой первый вывод выводит тактовый сигнал, принимать решение, является ли подключенный сменный объектив доступным для асинхронной коммуникации, в которой первый вывод не выводит тактовый сигнал, продолжать синхронную коммуникацию, в которой первый вывод выводит тактовый сигнал, если выносится решение, что асинхронная коммуникация является недоступной, и определять скорость передачи данных для асинхронной коммуникации, в которой коммуникация осуществляется путем использования первого и второго выводов без тактового сигнала, если выносится решение, что асинхронная коммуникация является доступной.
Кроме того, сменный объектив, подключаемый к устройству съемки изображения, включает в себя первый и второй выводы для коммуникации с устройством съемки изображения; и средство управления коммуникацией, чтобы, если коммуникация осуществляется с подключенным сменным объективом, в синхронной коммуникации, в которой тактовый сигнал принимается первым выводом, принимать решение, является ли устройство снятия изображения с подключенным объективом доступным для асинхронной коммуникации, в которой тактовый сигнал не выводится на первый вывод, продолжать синхронную коммуникацию, в которой тактовый сигнал принимается первым выводом, если выносится решение, что асинхронная коммуникация является недоступной, и осуществлять асинхронную коммуникацию, в которой коммуникация осуществляется путем использования первого и второго выводов без тактового сигнала, если выносится решение, что асинхронная коммуникация является доступной.
Полезные эффекты изобретения
С помощью технической идеи объекта заявки могут обеспечиваться устройство снятия изображения, являющееся доступным для коммуникации со сменным объективом, который может дополнительно улучшить рабочую характеристику, и для коммуникации со сменным объективом старого типа, использующим традиционный способ коммуникации при поддержании при этом совместимости, и сменный объектив.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
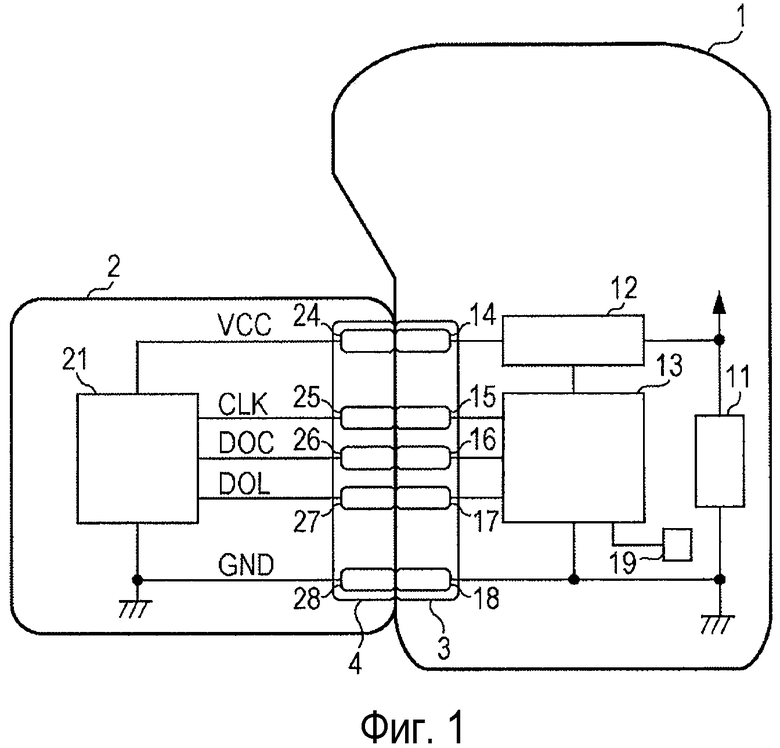
Фиг.1 - иллюстрация, показывающая конфигурации схем для камеры и сменного объектива.
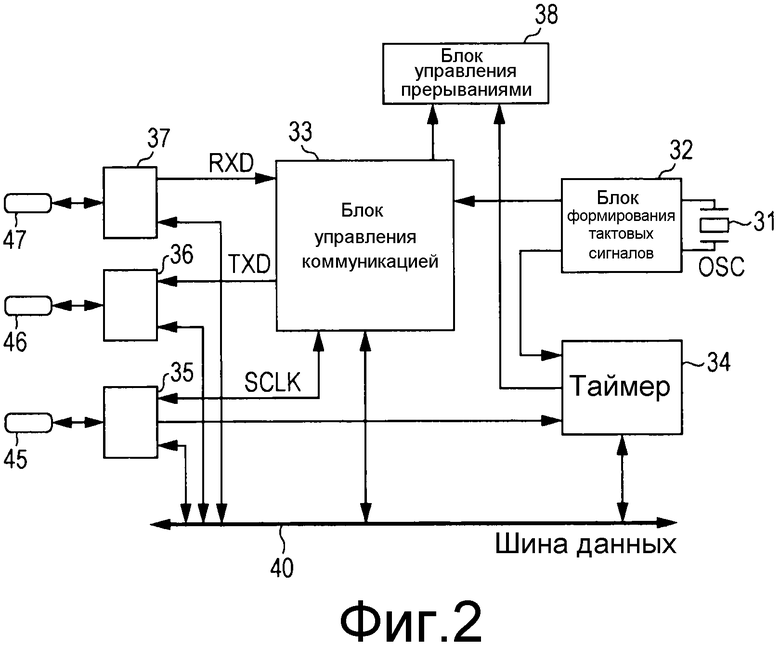
Фиг.2 - принципиальная блок-схема микрокомпьютера.
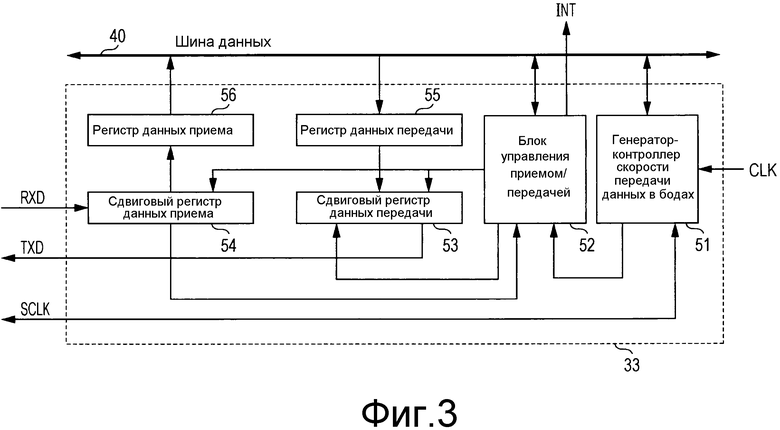
Фиг.3 - блок-схема для схемы управления коммуникацией.
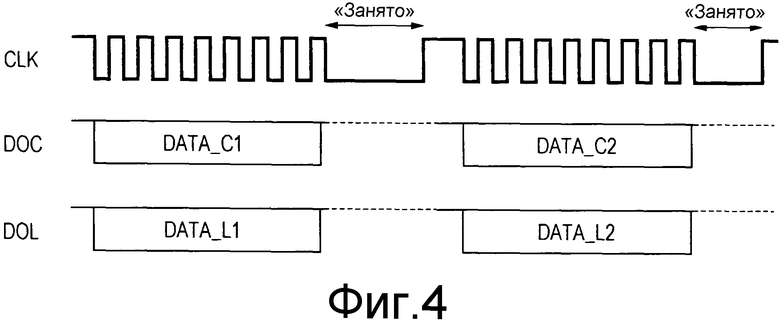
Фиг.4 - временная диаграмма коммуникационных сигналов между камерой и сменным объективом.
Фиг.5 - схема последовательности операций для микрокомпьютера камеры.
Фиг.6 - схема последовательности операций для микрокомпьютера объектива.
Фиг.7 - схема последовательности операций для системы камеры из камеры и сменного объектива.
Фиг.8 - временная диаграмма коммуникационных сигналов между камерой и сменным объективом.
Фиг.9 - временная диаграмма коммуникационных сигналов между камерой и сменным объективом.
Фиг.10 - схема последовательности операций для микрокомпьютера камеры.
Фиг.11 - схема последовательности операций для микрокомпьютера камеры.
Фиг.12 - схема последовательности операций для микрокомпьютера объектива.
Фиг.13 - схема последовательности операций для микрокомпьютера камеры согласно второму варианту осуществления.
Фиг.14 - схема последовательности операций для микрокомпьютера объектива согласно второму варианту осуществления.
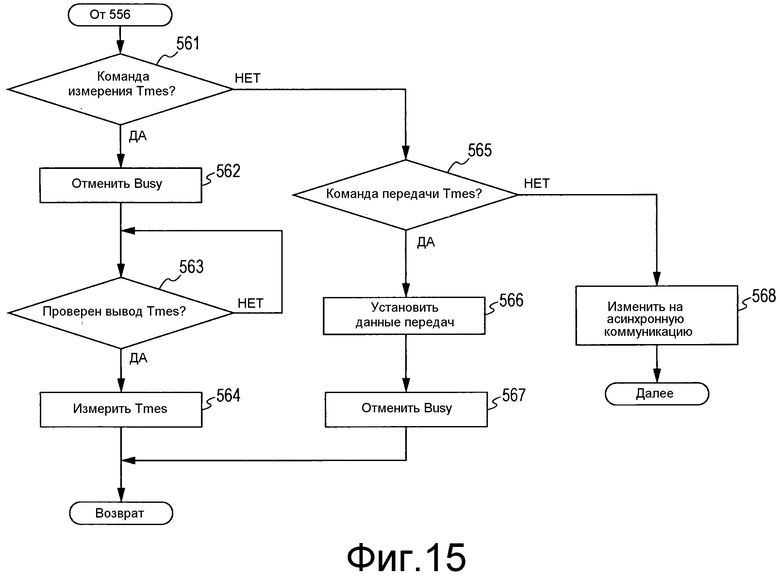
Фиг.15 - схема последовательности операций для микрокомпьютера объектива согласно второму варианту осуществления.
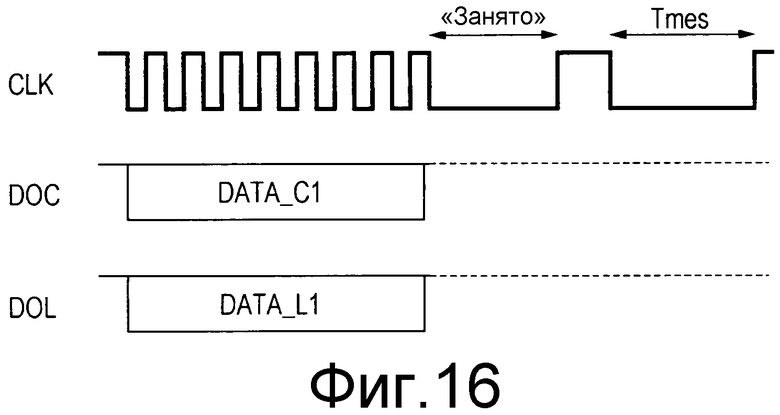
Фиг.16 - временная диаграмма коммуникационных сигналов между камерой и сменным объективом согласно второму варианту осуществления.
Описание вариантов осуществления изобретения
Далее, примеры, к которым применяется техническая идея объекта заявки, описываются ниже в форме вариантов осуществления.
Первый вариант осуществления
Конфигурации схем для камеры и сменного объектива
На фиг.1 показана иллюстрация конфигураций схем для сменного объектива 2 и камеры 1, к которой может быть подключен сменный объектив 2, показана в виде реализаций настоящего изобретения. Сменный объектив 2 может быть объективом I-типа и объективом II-типа. Объектив I-типа является недоступным для асинхронной коммуникации, которая может обеспечивать синхронизацию без осуществления вывода тактового сигнала CLK (описанного далее), и объектив II-типа является доступным для асинхронной коммуникации. Камера 1 включает в себя установочную часть 3, и сменный объектив 2 включает в себя установочную часть 4 объектива.
Камера 1 включает в состав аккумуляторную батарею 11, блок 12 электропитания (выработки электроэнергии) и микрокомпьютер 13 камеры. Блок 12 электропитания принимает напряжение, которое выводит аккумуляторная батарея 11, и генерирует напряжение питания, являющееся оптимально стабилизированным для управления электрической схемой микрокомпьютера 13 камеры и т.д. Блок 12 электропитания подает напряжение на соответственные части электрической схемы. Камера 1 обычно включает в себя фотометрический сенсор для управления экспозицией и сенсор автофокусировки (AF) для управления автоматической фокусировкой. Кроме того, камера 1 включает в себя конфигурацию схемы, содержащую устройство съемки изображения для получения (фиксации) цифрового изображения и управляющую схему для устройства, схему аналогово-цифрового (A/D) преобразования, схему обработки изображения, жидкокристаллический монитор и управляющую схему для монитора, запоминающее устройство для записи цифрового изображения и блок управления электродвигателем для управления действием механической части. Эти компоненты не касаются глубоко предмета технической идеи объекта заявки, и, следовательно, эти компоненты не показываются.
Контактные части 14-18, которые обеспечены в установочной части 3 в камере и используются для обмена электрическими сигналами со сменным объективом, описаны ниже. Вывод 14 питания камеры подает на сменный объектив питание для объектива, генерируемое блоком 12 электропитания. Вывод 15 камеры «CLK» (тактовый сигнал) используется в качестве первого вывода, который передает, например, синхронный тактовый сигнал при осуществлении коммуникации между камерой и сменным объективом. Вывод 16 камеры «DOC» используется в качестве второго вывода, который передает данные передачи от камеры на сменный объектив. Вывод 17 камеры «DOL» используется в качестве второго вывода, который принимает данные передачи от сменного объектива на камеру. В этом варианте осуществления DOC вывод и DOL вывод, использующиеся в качестве вторых выводов, проиллюстрированы в виде выполненных отдельно DOC вывода 16 и DOL вывода 17 для последовательной передачи. Альтернативно, DOC вывод и DOL вывод, используемые в качестве вторых выводов, могут использоваться в качестве первых выводов. Эти выводы 15-17 соединяются с микрокомпьютером 13 камеры. Ссылочный символ 18 обозначает вывод заземления. Датчик 19 температуры выводит информацию, относящуюся к температуре вокруг камеры. «Температурный» выход соединяется с микрокомпьютером 13 камеры.
Сменный объектив 2 включает в состав микрокомпьютер 21 объектива, и контактные части 24-28, которые обеспечиваются на установочной части 4 объектива и используются для обмена электрическими сигналами с камерой. Вывод 25 питания объектива принимает электропитание от камеры. CLK вывод 25 объектива передает, например, синхронный тактовый сигнал, если осуществляется коммуникация с камерой. DOC вывод 26 объектива принимает данные передачи от камеры на сменный объектив. DOL вывод 27 объектива передает данные передачи от сменного объектива на камеру. Ссылочный символ 28 обозначает заземляющий вывод объектива.
При корректно подключенном к камере 1 сменном объективе 2 выводы 14-18 камеры соединяются с выводами 24-28 объектива согласно взаимно однозначному соответствию, как проиллюстрировано.
Настоящее изобретение может применяться даже при осуществлении беспроводной коммуникации между камерой и объективом.
В этом варианте осуществления выводы 14-18 камеры обеспечиваются в установочной части 3. Однако CLK вывод 15 камеры может обеспечиваться в позиции, отличной от установочной части 3. Кроме того, выводы 24-28 объектива обеспечиваются в установочной части 4 объектива. Однако CLK вывод 25 объектива может обеспечиваться в позиции, отличной от установочной части 4 объектива.
В этом варианте осуществления два типа сменных объективов 2 используются, как описано ниже. Объективом одного типа является объектив I-типа, являющийся доступным для синхронной коммуникации, но являющийся недоступным для асинхронной коммуникации с камерой. Объективом другого типа является объектив II-типа, который является доступным для синхронной коммуникации и асинхронной коммуникации с камерой. Синхронной коммуникацией является способ осуществления коммуникации между камерой и сменным объективом на основе синхронного тактового сигнала, передаваемого через CLK вывод 25, тогда как при этом поддерживаются синхронная передача и прием. Асинхронной коммуникацией является способ осуществления коммуникации между камерой и сменным объективом с заранее заданной скоростью передачи данных в бодах, без использования синхронного тактового сигнала, передаваемого через CLK вывод 25.
Конфигурация, относящаяся к управлению последовательной передачей
На фиг.2 иллюстрируется конфигурация, относящаяся к управлению последовательной передачей, из конфигураций схем, включенных в состав микрокомпьютера 13 камеры или микрокомпьютера 21 объектива. Микрокомпьютер 13 камеры и микрокомпьютер 21 объектива являются конфигурациями, обеспеченными отдельно; однако эти микрокомпьютеры могут иметь одинаковые компоненты, чтобы реализовывать конфигурации, относящиеся к управлению последовательной передачей. Следовательно, микрокомпьютеры описываются со ссылкой на общий чертеж.
Во многих случаях генератором 31 является кварцевый генератор или керамический генератор. Такой генератор часто является предпочтительнее внешним устройством, чем размещаемым в микрокомпьютере. Схема 32 формирования тактовых сигналов является генераторной схемой, которая соединена с генератором 31 и генерирует колебательные тактовые сигналы. Генераторная схема включает в себя схему умножителя, которая преобразовывает колебательные тактовые сигналы в тактовые сигналы более высокой частоты, и схему формирования тактовых сигналов, которая делит и комбинирует тактовые сигналы высокой частоты, преобразованные схемой умножителя, и генерирует тактовые сигналы с различными частотами. Ссылочный символ 33 представляет схему управления коммуникацией, которая описывается подробно со ссылкой на фиг.3. Схема 34 счетчика/таймера может подсчитывать число импульсов входного сигнала и измерять временную длительность входного сигнала. Тактовый сигнал, генерируемый схемой 32 формирования тактовых сигналов, подается на схему управления коммуникацией и схему 34 счетчика/таймера. Ниже описаны схемы 35-37 управления вводом-выводом (I/O). Схемы 35-37 управления вводом-выводом являются схемами, которые изменяют направление ввода/вывода данных и тип входного/выходного сигнала для входных/выходных сигналов и форму входной/выходной схемы для входных/выходных выводов 45-47. Изменение направления ввода/вывода данных выбирает, используется ли вывод для вывода данных или для ввода данных. Изменение типа входного/выходного сигнала выбирает, соединен ли с выводом входной/выходной сигнал для сигнала универсального параллельного ввода-вывода или входной/выходной сигнал со схемой 33 управления коммуникацией. Изменение формы входной/выходной схемы выбирает, выполняется ли вывод способом «с открытым стоком» или способом CMOS, описанным в PTL 1, и выбирает, подсоединен ли нагрузочный резистор. Схема 35 управления вводом-выводом выбирает ввод или вывод относительно входного/выходного вывода 45. Синхронный тактовый сигнал SCLK подсоединен от схемы 33 управления коммуникацией к схеме 35 управления вводом-выводом. Схема 35 управления вводом-выводом может подавать сигнал SCLK на схему 34 счетчика/таймера. Схема 36 управления вводом-выводом выбирает ввод или вывод относительно входного/выходного вывода 46. Выходной сигнал TXD (передачи данных) последовательной передачи данных подсоединен от схемы 33 управления коммуникацией к схеме 36 управления вводом-выводом. Схема 37 управления вводом-выводом выбирает ввод или вывод относительно входного/выходного вывода 47. Входной сигнал RXD (приема данных) последовательной передачи данных подсоединен от схемы 33 управления коммуникацией к схеме 37 управления вводом-выводом.
Ссылочный символ 38 представляет схему управления прерываниями. Сигналы генерации прерывания подсоединены к схеме 38 управления прерываниями от схемы 33 управления коммуникацией и схемы 34 счетчика/таймера. Шина 40 данных обеспечивается в микрокомпьютере. Вышеописанная схема 33 управления коммуникацией, схема 34 счетчика/таймера и схемы 35-37 управления вводом-выводом соединяются с шиной 34 данных и могут передавать и принимать данные, требуемые для операций. Микрокомпьютер включает в себя конфигурации схем, содержащие арифметико-логическое устройство (АЛУ, ALU), счетчик команд, постоянное запоминающее устройство (ПЗУ, ROM), оперативное запоминающее устройство (ОЗУ, RAM), аналого-цифровой преобразователь (АЦП, A/D) в дополнение к проиллюстрированным конфигурациям; однако такие конфигурации схем не показаны.
В случае микрокомпьютера камеры входной/выходной вывод 45 соединяется с CLK выводом 15 по фиг.1, входной/выходной вывод 46 соединяется с DOC выводом 16 по фиг.1, и входной/выходной вывод 47 соединяется с DOL выводом 17 по фиг.1.
В случае микрокомпьютера камеры входной/выходной вывод 45 соединяется с CLK выводом 25 объектива по фиг.1, входной/выходной вывод 46 соединяется с DOL выводом 27 объектива по фиг.1, и входной/выходной вывод 47 соединяется с DOC выводом 26 объектива по фиг.1. Это имеет место потому, что сигнал DOC соответствует данным передачи от камеры на объектив, и сигнал DOL соответствует данным передачи от объектива на камеру.
Детализированная конфигурация схемы 33 управления коммуникацией
На фиг.3 показана иллюстрация для пояснения с дополнительными подробностями конфигурации схемы 33 управления коммуникацией, показанной на фиг.2. Тактовые сигналы с различными частотами, генерируемые схемой 32 формирования тактовых сигналов, вводятся на генератор-контроллер 51 скорости передачи в бодах. Генератор-контроллер 51 скорости передачи в бодах генерирует тактовые сигналы, требуемые для управления передачей данных, в соответствии с различными данными установки коммуникации, передаваемыми через шину 40 данных. Данные установки коммуникации включают выборку, является ли коммуникация ведущей или ведомой, выборку, является ли коммуникация синхронной коммуникацией или асинхронной коммуникацией, установку частоты для синхронных тактовых сигналов в случае синхронной коммуникации, и установку частоты для асинхронных стробирующих сигналов в случае асинхронной коммуникации. Если данные установки коммуникации задают синхронную коммуникацию и ведущее устройство коммуникации, синхронный тактовый сигнал SCLK, соответствующий значению установки частоты для синхронных тактовых сигналов в случае синхронной коммуникации, является выходным. Если данные установки коммуникации задают синхронную коммуникацию и ведомое устройство коммуникации, синхронный тактовый сигнал SCLK является входным. Синхронный тактовый сигнал SCLK подается также на блок 52 управления передачей/приемом. Если данные установки коммуникации задают асинхронную коммуникацию, стробирующие тактовые сигналы, соответствующие значению установки частоты для асинхронных стробирующих сигналов в случае асинхронной коммуникации, подаются на блок 52 управления передачей/приемом. Блок 52 управления передачей/приемом подает тактовые сигналы сдвига на сдвиговый регистр 53 передачи и сдвиговый регистр 54 приема (описаны далее) в соответствии с различными данными установки коммуникации, передаваемыми через шину 40 данных, и выполняет управление синхронизацией для последовательной передачи путем ввода и вывода запускающего сигнала для передачи и приема. Кроме того, блок 52 управления передачей/приемом генерирует сигнал прерывания в момент времени завершения передачи и приема для последовательной передачи.
Сдвиговый буфер 53 передачи вводит данные, которые передаются посредством последовательной передачи, в виде параллельного ввода, и выводит сигнал TXD в виде последовательного вывода. Блок 52 управления передачей/приемом подает тактовые сигналы сдвига для последовательного вывода. Если осуществляется асинхронная коммуникация, запускающий сигнал передачи вводится от блока 52 управления передачей/приемом. Сдвиговый регистр 54 приема вводит сигнал данных RXD, принятый посредством последовательной передачи, в виде последовательного ввода, и выводит сигнал в виде параллельного вывода. Блок 52 управления передачей/приемом подает тактовые сигналы сдвига для последовательного ввода. Если осуществляется асинхронная коммуникация, запускающий сигнал приема выводится на блок 52 управления передачей/приемом. Регистр 55 данных передачи вводит данные передачи с шины 40 данных и устанавливает данные в сдвиговый регистр 53 передачи. Регистр 56 данных приема вводит данные приема из сдвигового регистра 54 приема и может выводить данные на шину 40 данных.
Протокол синхронной коммуникации
На фиг.4 показан пример протокола между камерой и сменным объективом в течение синхронной коммуникации. Сигналом CLK является синхронный тактовый сигнал для синхронной коммуникации. В этом примере камера используется в качестве ведущего устройства для коммуникации между камерой и сменным объективом. Сигналом DOC являются данные передачи, которые выводятся от камеры и вводятся на объектив. Сигналом DOL являются данные передачи, которые выводятся от объектива и вводятся на камеру.
В этом примере данные сигналов DOC и DOL изменяются в синхронизации с задним фронтом синхронного тактового сигнала CLK на 8-битовой основе в качестве единицы одиночной передачи, и данные DOL фиксируются (в регистре-защелке) в камере, и данные DOC фиксируются (в регистре-защелке) в объективе по переднему фронту синхронного тактового сигнала CLK. Уровни сигналов DOC и DOL изменяются в синхронизации с задним фронтом синхронного тактового сигнала CLK в соответствии с битовыми значениями данных, подлежащих передаче. Следовательно, подробность, каким образом изменяются уровни, не описывается.
Синхронная коммуникация, в которой данные синхронизируются тактовым сигналом, дает возможность, чтобы обмену подлежали многие порции информации даже при малом числе контактов. В частности, при использовании относительно недорогого микрокомпьютера обмен данными может осуществляться надежно, даже если рабочий тактовый сигнал имеет ошибку в точности.
Последовательность операций управления
для микрокомпьютера 13 камеры
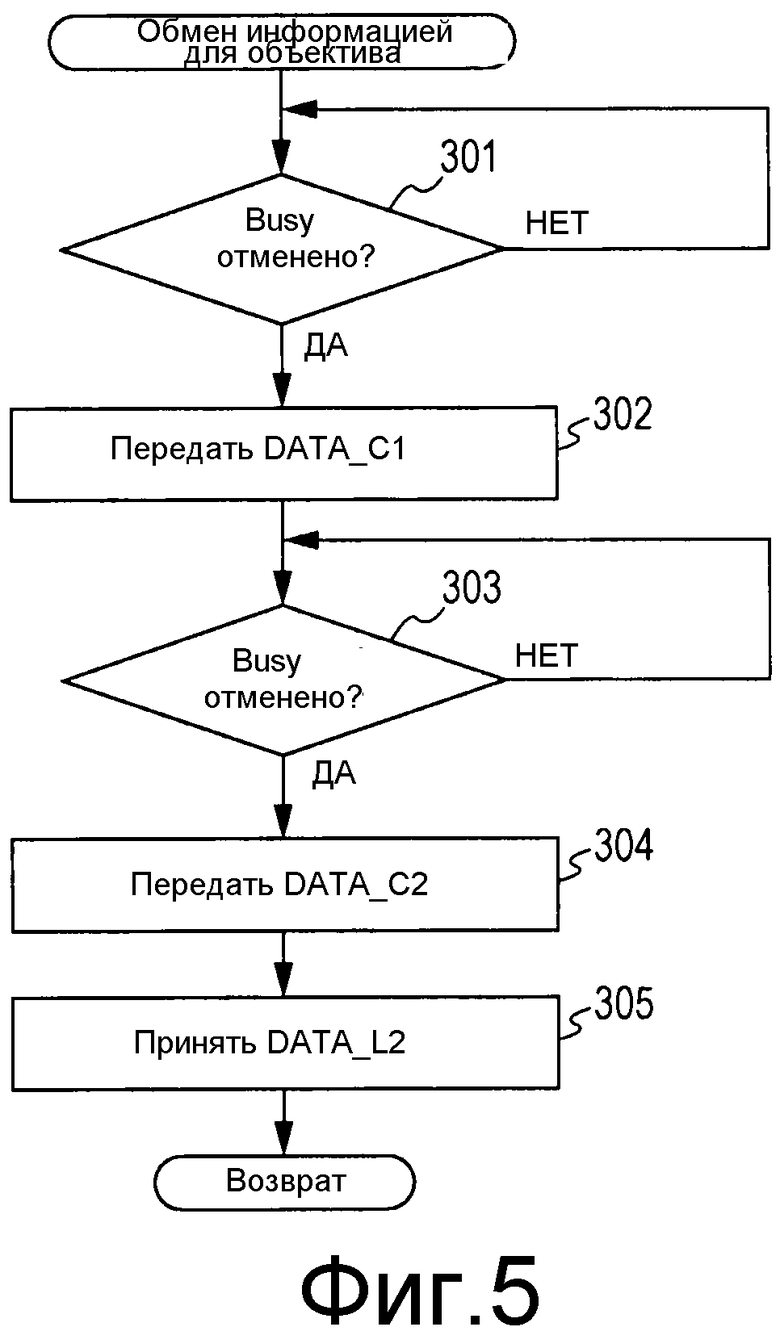
Последовательность операций управления при осуществлении микрокомпьютером 13 камеры коммуникации со сменным объективом в соответствии с протоколом коммуникации по фиг.4 описывается со ссылкой на фиг.5.
Проверяется уровень входного сигнала для вывода, который выводит синхронный тактовый сигнал CLK, и выносится решение, отменяется ли состояние Busy объектива (этап 301). В этом варианте осуществления полагается, что состояние находится в состоянии Busy, если объектив устанавливает вывод на уровень L («низкий»). В этом состоянии камера не может осуществлять коммуникацию с объективом даже для синхронного тактового сигнала CLK. Состоянием Busy является неработоспособное состояние ожидания-коммуникации. Если уровень входного сигнала для вывода, который выводит сигнал CLK, находится на уровне H («высокий»), и, следовательно, объектив не находится в состоянии Busy, процесс переходит на этап 302.
На этапе 302 данные DATA_C1, которые передаются на объектив, устанавливаются в сдвиговый регистр последовательной передачи данных, и последовательная передача осуществляется на основе одиночной передачи. Данные DATA_C1, которые передаются на объектив, являются некоторой командой для объектива, и ответными данными от объектива в ответ на команду являются данные DATA_L2 посредством следующей передачи данных на основе одиночной передачи. Данные DATA_L1, которые передаются от объектива на камеру в этот момент, являются несвязанными (безразличными) данными, которые не соответствуют команде от камеры. Следовательно, данные DATA_L1 не являются считываемыми или обрабатываемыми.
Проверяется уровень входного сигнала для вывода, который выводит синхронный тактовый сигнал CLK, и выносится решение, отменяется или не отменяется состояние Busy объектива (этап 303). Сменный объектив устанавливает вывод, который выводит синхронный сигнал CLK на уровень L в то время, как содержимое переданных DATA_C1 анализируется в объективе, и обработка применяется к ним в соответствии с анализом. В качестве результата, синхронный сигнал CLK приводится в состояние Busy. Процесс ожидает, пока не завершится обработка, и сменный объектив устанавливает на уровень H вывод, который выводит синхронный сигнал CLK. То есть процесс переходит на этап 304 после того, как сменный объектив более не находится в состоянии Busy.
Затем, данные DATA_C2, которые передаются на сменный объектив, устанавливаются в сдвиговый регистр последовательной передачи данных, и выполняется последовательная передача на основе одиночной передачи (этап 304). Если данные DATA_C1, переданные на этапе 302, являются командой для передачи на камеру специфической для объектива информации, содержимое данных DATA_C2 представляет несвязанные данные. В этом случае данные DATA_L2, переданные от объектива, содержат информацию ответа на данные DATA_C1. Данные DATA_L2, переданные на сдвиговый регистр приема, являются полученными (этап 305).
Вышеописанная последовательность операций является последовательностью основных операций микрокомпьютера камеры при осуществлении коммуникации со сменным объективом.
Последовательность операций управления
для микрокомпьютера 21 объектива
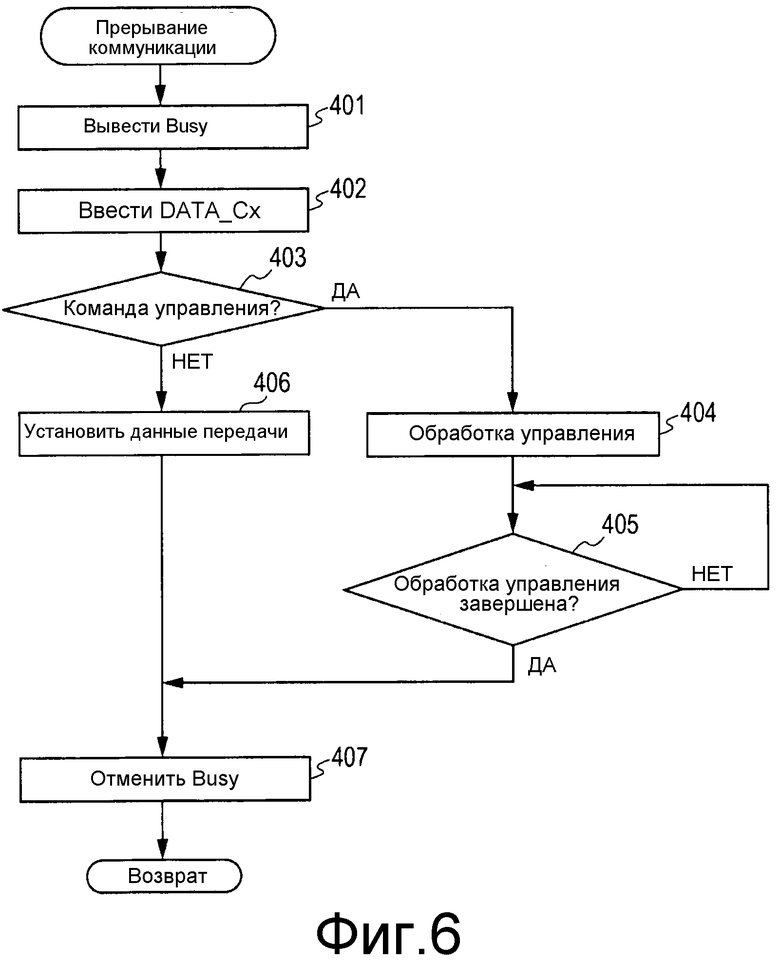
Последовательность операций управления при осуществлении микрокомпьютером 21 сменного объектива коммуникации с камерой в соответствии с протоколом коммуникации по фиг.4 описывается ниже со ссылкой на фиг.6.
Микрокомпьютер 21 сменного объектива используется в качестве ведомого устройства в течение коммуникации. Таким образом, прием последовательной передачи данных на основе одиночной передачи от камеры обнаруживается функцией прерывания коммуникации, которая генерирует сигнал прерывания, если подсчитано заранее заданное число передних фронтов для синхронного тактового сигнала CLK.
Во-первых, вывод, который принимает синхронный тактовый сигнал CLK, устанавливается на уровень L, так что камера может принять решение, что объектив находится в состоянии Busy (этап 401).
Вводятся данные передачи DATA_C1, которые передаются от камеры и вводятся на сдвиговый регистр приема, и анализируется содержимое данных. Хотя данными передачи от камеры являются DATA_C1, данные на блок-схеме называются DATA_Cx, поскольку DATA_C2 и т.д. могут передаваться в последующем процессе (этап 402).
На этапе 403, если содержимым данных передачи DATA_C1 от камеры является команда управления (приводом) для исполнительного (приводного) устройства в сменном объективе, процесс переходит на этап 404.
На этапе 404 обработка управления выполняется для исполнительного устройства в сменном объективе в соответствии с содержимым данных передачи DATA_C1 от камеры.
Выносится решение, закончена ли обработка, относящаяся к управлению действием исполнительного устройства, в объективе, и объектив может принимать следующую передачу данных от камеры (этап 405). Если объектив может принимать следующую передачу, процесс переходит на этап 407.
Если на этапе 403 содержимым данных передачи, DATA_C1, от камеры является запрос передачи данных, специфический для сменного объектива, процесс переходит на этап 406. На этапе 406 специфические для объектива данные, запрашиваемые на основе данных передачи DATA_C1 от камеры, устанавливаются в сдвиговый регистр передачи.
На этапе 407 вывод, который принимает синхронный тактовый сигнал CLK, устанавливается на уровень H, так что камера может вынести решение, что объектив не находится в состоянии Busy.
Объем данных, подлежащий обработке для коммуникации, чтобы выполнять с высокой точностью управление экспозицией и управление автоматической фокусировкой, требует многократных единиц передач данных. Кроме того, информация должна последовательно обновляться всякий раз, когда изменяются позиции изменения масштаба изображения и позиции кольца дальности для сменного объектива. Следовательно, камера должна часто осуществлять такой обмен информацией. Микрокомпьютер камеры осуществляет передачу в то время, как микрокомпьютер часто ожидает отмены состояния Busy для объектива. Вследствие этого, даже если частота синхронного тактового сигнала CLK повышается, рабочая характеристика может улучшаться менее ожидаемого. Камера часто осуществляет прерывание коммуникации по отношению к микрокомпьютеру объектива, и объектив должен предпочтительно выполнять обработку прерывания коммуникации, чтобы выводить сигнал Busy или сбрасывать состояние Busy при всяком возникновении прерывания коммуникации. Это может мешать улучшению рабочей характеристики.
Операция установки параметров коммуникации для системы камеры
На фиг.7 показана блок-схема операции установки параметров, относящаяся к коммуникации для системы камеры, включающей в себя камеру и сменный объектив, которые являются реализациями по настоящему изобретению. Нужно отметить, что отдельные последовательности операций для микрокомпьютеров в камере и сменном объективе будут описаны далее. Фиг.7 описывается в качестве общей последовательности операций.
Если включается выключатель питания (не показан), и камера и сменный объектив становятся работоспособными, начинается операция по блок-схеме. Микрокомпьютер 13 камеры выполняет установку параметров для схемы 33 управления коммуникацией и схем 35-37 управления вводом-выводом согласно синхронной коммуникации в качестве начальной установки для способа коммуникации со сменным объективом (этап 101). Это имеет место, поскольку камера является доступной для объектива I-типа и объектива II-типа. При этой установке параметров микрокомпьютер 13 камеры используется в качестве ведущего устройства коммуникации в течение коммуникации. В микрокомпьютере 13 камеры входной/выходной вывод 45 выводит синхронные тактовые коммуникационные сигналы SCLK. Кроме того, при этой установке параметров, в микрокомпьютере 13 камеры, TXD сигнал данных передачи от камеры на сменный объектив выводится от входного/выходного вывода 46, и RXD сигнал данных передачи от сменного объектива на камеру вводится от входного/выходного вывода 47.
Даже в случае объектива II-типа, доступного для асинхронной коммуникации, сменный объектив выполняет установку параметров ведомого устройства в течение синхронной коммуникации для схемы 33 управления коммуникацией и схем 35-37 управления вводом-выводом в качестве начальной установки. При этой установке параметров, в микрокомпьютере 21 объектива, синхронный тактовый коммуникационной сигнал SCLK вводится от входного/выходного вывода 45. Кроме того, при этой установке, в микрокомпьютере 21 объектива, TXD сигнал данных передачи от сменного объектива на камеру выводится от входного/выходного вывода 46, и RXD сигнал данных передачи от камеры на сменный объектив вводится от входного/выходного вывода 47.
Коммуникация согласно способу синхронизации осуществляется между камерой и сменным объективом (этап 102). Временная диаграмма для синхронной коммуникации и последовательности операций для микрокомпьютера 13 камеры и микрокомпьютера 21 объектива будут описаны далее со ссылкой на фиг.10-12.
При этой коммуникации команда передачи информации объектива передается от камеры в виде DATA_C1. Командой передачи информации объектива является команда, которая дает указание сменному объективу передать на камеру тип и имя сменного объектива, или информацию, указывающую, является ли сменный объектив объективом I-типа, недоступным для асинхронной коммуникации, или объективом II-типа, доступным для асинхронной коммуникации.
При приеме сменным объективом команды на передачу информации объектива сменный объектив передает соответствующую команде информацию объектива на камеру в виде DATA_L2.
Микрокомпьютер 13 камеры анализирует принятую информацию объектива, DATA_L2, и выносит решение, является ли подключенный сменный объектив объективом I-типа, недоступным для асинхронной коммуникации, или объективом II-типа, доступным для асинхронной коммуникации (этап 103). Если микрокомпьютер 13 камеры выносит решение, что подключенным сменным объективом является объектив II-типа, процесс переходит на этап 104.
Камера осуществляет коммуникацию согласно способу синхронизации со сменным объективом и передает команду для вывода импульса измерения для регулировки скорости передачи в бодах, если осуществляется асинхронная коммуникация (этап 104). Подробность регулировки скорости передачи в бодах описывается далее. В асинхронной коммуникации передача данных осуществляется без использования синхронного тактового сигнала, передаваемого посредством вывода 25 CLK. Следовательно, проводится регулировка скорости передачи в бодах, чтобы подстроить скорость передачи данных.
Если объектив принимает эту команду, объектив выполняет вывод импульсного сигнала для регулировки скорости передачи в бодах при осуществлении асинхронной коммуникации, чтобы позволить камере выполнять измерение. Временная диаграмма вывода импульса для регулировки скорости передачи в бодах, чтобы установить скорость передачи данных, описывается далее со ссылкой на фиг.9.
На этапе 105 микрокомпьютер 13 камеры подстраивает скорость передачи в бодах для асинхронной коммуникации с учетом относительного сдвига точности частоты колебаний для микрокомпьютера 21 объектива на основе счетного значения для импульса Tmes регулировки скорости передачи в бодах, которое получено на этапе 104.
На этапе 106 микрокомпьютер 13 камеры изменяет установку параметров для способа коммуникации со сменным объективом и выполняет установку для схемы 33 управления коммуникацией и схем 35-37 управления вводом-выводом для осуществления асинхронной коммуникации.
Микрокомпьютер 21 объектива изменяет установку параметров для способа коммуникации с камерой и выполняет установку для схемы 33 управления коммуникацией и схем 35-37 управления вводом-выводом для осуществления асинхронной коммуникации. После исполнения этого этапа коммуникация между камерой и сменным объективом становится асинхронной коммуникацией.
Если подключенным сменным объективом является объектив I-типа, недоступный для асинхронной коммуникации, процесс переходит от этапа 103 на этап 107, и синхронная коммуникация продолжается.
Пример временной диаграммы коммуникации
в асинхронной коммуникации
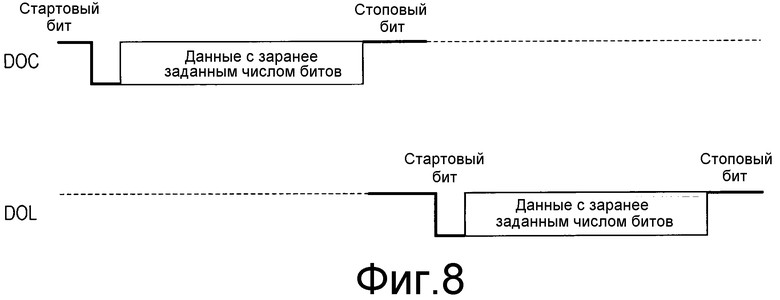
На фиг.8 показан пример временной диаграммы коммуникации в асинхронной коммуникации. Если от камеры на объектив передается команда запроса передачи информации объектива или команда управления для исполнительного устройства в объективе, то выходной является комбинация асинхронно передаваемых данных со скоростью передачи в бодах, установленной в сигнале DOC. Во-первых, выводится стартовый бит на уровне L, и затем данные с заранее заданным числом битов выводятся с установленной скоростью в бодах. Если окончен вывод данных с заранее заданным числом битов, выводится стоповый бит на уровне H, и передача является завершенной. Сигнал CLK не подлежит выводу, и сигнал DOL не должен приниматься одновременно.
Если объектив передает на камеру информацию объектива в ответ на команду, переданную от камеры, объектив выводит информацию объектива на сигнал DOL в момент времени, когда объектив становится готовым к передаче данных, без использования сигнала CLK. Протокол коммуникации подобен таковому для сигнала DOC.
Путем изменения коммуникации на способ асинхронной коммуникации отмена состояния Busy не подлежит проверке. В противном случае выполняется проверка между микрокомпьютером 13 камеры и микрокомпьютером 21 объектива на основе одиночной передачи.
Нужно отметить, что вывод, который используется для осуществления передачи команды управления от камеры на объектив в течение асинхронной коммуникации, не ограничивается выводом DOC и может быть изменен на вывод CLK. В этом случае схемы подлежат изменению так, чтобы схема 35 управления вводом-выводом в камере была подсоединена к сдвиговому регистру 53 передачи, и схема 35 управления вводом-выводом в объективе была подсоединена к сдвиговому регистру 54 приема.
Теперь окончено описание последовательности операций установки параметров, относящейся к коммуникации для системы камеры, включающей в состав камеру и сменный объектив.
Временная диаграмма для установки скорости передачи данных
Полагается, что заранее заданная скорость передачи в бодах для асинхронной коммуникации составляет 19200 бит/с в качестве примера установки (или регулировки) скорости передачи в бодах на этапе 105 (описано выше). Если генераторная схема в микрокомпьютере 21 объектива имеет частоту колебаний в 10 МГц без сдвига, микрокомпьютер 21 объектива может передавать и принимать передаваемые асинхронно данные со скоростью передачи в бодах в 19200 бит/с. Однако, если в микрокомпьютере 21 объектива генерируются колебания в 10,1 МГц вследствие ошибки элемента схемы, скоростью передачи в бодах может быть 19392 бит/с, поскольку значение содержит уход частоты, хотя ожидаемой скоростью передачи в бодах будет 19200 бит/с. В случае асинхронной коммуникации синхронные тактовые сигналы отсутствуют. Следовательно, если сдвиг между скоростями в бодах не находится в рамках заранее заданного диапазона, может возникать ошибка выборки, и данные не могут корректно передаваться или приниматься. Следовательно, микрокомпьютер 13 камеры выполняет установку скорости передачи в бодах в виде установки скорости передачи, соответствующей относительному сдвигу в точности частоты колебаний для микрокомпьютера 21 объектива.
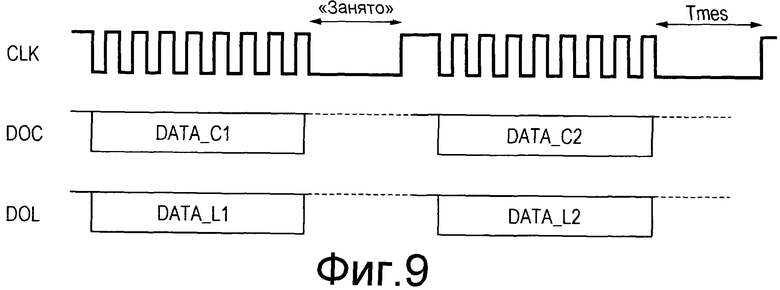
На фиг.9 показан пример временной диаграммы, относящейся к выводу импульса регулировки скорости передачи в бодах. Микрокомпьютер 13 камеры передает на сменный объектив команду, которая запрашивает вывод импульса регулировки скорости передачи в бодах, в виде данных DATA_C1 передачи камеры, показанных на фиг.9. Затем, микрокомпьютер 21 объектива изменяет вывод сигнала Busy на вывод (сигнала на уровне) L, тогда как микрокомпьютер 21 объектива принимает данные и анализирует команду. Если микрокомпьютер 21 объектива завершает анализ команды и готов к приему следующей передачи, микрокомпьютер 21 объектива устанавливает сигнал CLK на уровне H, чтобы отменить состояние Busy, и уведомляет камеру об отмене состояния Busy.
Если микрокомпьютер 13 камеры распознает, что уровнем сигнала CLK становится H, и, следовательно, состояние Busy для объектива отменено, микрокомпьютер 13 камеры передает данные передачи, DATA_C2. Данные передачи, DATA_C2, в этот момент являются несвязанными данными. Эти данные передаются просто в качестве синхронизирующего запускающего сигнала для вывода на объектив импульса регулировки скорости передачи в бодах.
Если микрокомпьютер 21 объектива принимает данные передачи, DATA_C2, и происходит прерывание коммуникации, микрокомпьютер 21 объектива немедленно изменяет сигнал CLK на вывод (на уровне) L, чтобы выводить импульс Tmes регулировки скорости передачи в бодах. Импульс Tmes регулировки скорости передачи в бодах, который является импульсом для подстройки скорости передачи, выводится в течение времени, соответствующего заранее заданному числу тактовых сигналов для рабочих тактовых сигналов, генерируемых генераторной схемой 32 микрокомпьютера 21 объектива. Например, если рабочие тактовые сигналы, генерируемые генераторной схемой 32 микрокомпьютера 21 объектива, составляют 10 МГц, и выводятся 65536 тактовых сигналов, обеспечивается вывод импульса длительностью 6,5536 мс в качестве импульса Tmes регулировки скорости передачи в бодах. Если рабочие тактовые сигналы, генерируемые генераторной схемой 32 микрокомпьютера 21 объектива, составляют 10,1 МГц вследствие ошибки элемента схемы, временной длительностью импульса Tmes регулировки скорости передачи в бодах становится 6,4887 мс. Разность между временной длительностью в 6,5536 мс и временной длительностью в 6,4887 мс отражает сдвиг точности частоты колебаний для генераторной схемы в микрокомпьютере 21 объектива.
После того, как микрокомпьютер 13 камеры передает данные передачи, DATA_C2, начинается задний фронт для входного/выходного вывода 45 и оканчивается передний фронт для вывода и выполняет измерение времени путем использования схемы 34 счетчика/таймера для измерения времени относительно импульса Tmes регулировки скорости передачи в бодах.
Если микрокомпьютер 13 камеры выполняет измерение времени путем использования схемы 34 счетчика/таймера с тактовыми сигналами в 16 МГц, время 6,5536 мс соответствует 104857 одиночным импульсам, и время 6,4887 мс соответствует 103819 одиночным импульсам. Кроме того, в камере микрокомпьютер 13 выполняет измерение времени путем использования схемы 34 счетчика/таймера с тактовыми сигналами в 16,16 МГц, время в 6,5536 мс соответствует 105906 одиночным импульсам, и время 6,4887 мс соответствует 104857 одиночным импульсам. При измерении времени для импульса Tmes регулировки скорости передачи в бодах микрокомпьютер 13 камеры может выявить относительный сдвиг точности частоты колебаний для микрокомпьютера 21 объектива по отношению к точности частоты колебаний для микрокомпьютера 13 камеры.
Микрокомпьютер 13 камеры устанавливает скорость передачи на основе сдвига точности.
Последовательность операций установки параметров коммуникации
для микрокомпьютера 13 камеры
Затем последовательность операций, относящаяся к установке параметров коммуникации для микрокомпьютера 13 камеры по отношению к сменному объективу, описывается со ссылкой на блок-схемы, начинающиеся с фиг.10.
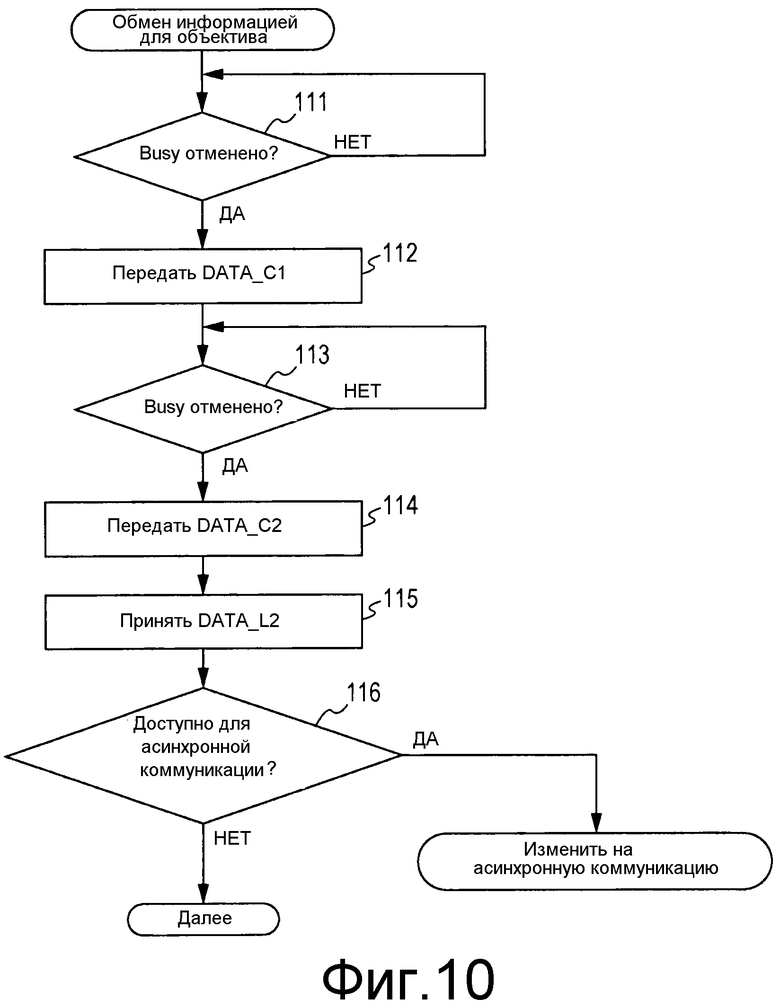
Если включается выключатель питания (не показан), и, следовательно, микрокомпьютер 13 камеры начинает свою работу и осуществляет коммуникацию со сменным объективом, микрокомпьютер 13 камеры исполняет нижеследующую последовательность операций.
При включении выключателя питания схема 33 управления коммуникацией и схемы 35-37 управления вводом-выводом устанавливаются, чтобы осуществлять синхронную коммуникацию. Следовательно, проверяется уровень входного сигнала для вывода, который выводит синхронный тактовый сигнал CLK, и выносится решение, отменяется или не отменяется состояние Busy объектива (этап 111), осуществляется процесс, который выполняется при синхронной коммуникации. Если вывод, который выводит сигнал CLK, имеет уровень (сигнала) H, и, следовательно, объектив не находится в состоянии Busy, процесс переходит на этап 112.
На этапе 112 данные DATA_C1, которые передаются на сменный объектив, устанавливаются в сдвиговый регистр передачи, и осуществляется синхронная коммуникация. Содержимым DATA_C1 является команда передачи информации объектива, указывающая тип и имя сменного объектива, или является или не является объектив объективом II-типа, доступным для асинхронной коммуникации.
На этапе 113 проверяется уровень входного сигнала для вывода, который выводит синхронный тактовый сигнал CLK, и выносится решение, отменяется или не отменяется состояние Busy объектива. Сменный объектив устанавливает вывод, который выводит синхронный сигнал CLK на уровень L в то время, как объектив анализирует содержимое переданных DATA_C1 и выполняет обработку в соответствии с анализом. Состояние становится состоянием Busy. Процесс ожидает завершения обработки и, следовательно, сброшенного состояния Busy, и затем переходит на этап 114. На этапе 114 несвязанные данные DATA_C2 устанавливаются в сдвиговый регистр передачи, и выполняется синхронная коммуникация. Затем на этапе 115 данные DATA_L2, являющиеся информацией объектива, переданной от сменного объектива, если данные DATA_C2 передаются на предшествующем этапе, вводятся из сдвигового регистра приема.
Затем, анализируется информация объектива, вводимая на предшествующем этапе, и выносится решение, является ли подключенный в текущий момент сменный объектив доступным для асинхронной коммуникации (этап 116). Если микрокомпьютер 13 камеры выносит решение, что подключенный в текущий момент сменный объектив является объективом II-типа, который является доступным для асинхронной коммуникации, процесс переходит на этап 151 по фиг.11.
На этапе 151 микрокомпьютер 13 камеры проверяет уровень входного сигнала относительно вывода, который выводит синхронный тактовый сигнал CLK, и выносится решение, отменено ли состояние Busy объектива. Если вывод, который выводит сигнал CLK, имеет уровень H, и, следовательно, объектив не находится в состоянии Busy, процесс переходит на этап 152.
На этапе 152 данные DATA_C1, которые передаются на сменный объектив, устанавливаются в сдвиговый регистр передачи, и осуществляется синхронная коммуникация. Содержимым DATA_C1 является команда, которая запрашивает сменный объектив вывести импульс измерения для регулировки скорости передачи в бодах, если осуществляется синхронная коммуникация.
Проверяется уровень входного сигнала для вывода, который выводит синхронный тактовый сигнал CLK, и выносится решение, отменяется или не отменяется состояние Busy объектива (этап 153). Если вывод, который выводит сигнал CLK, имеет уровень H, и, следовательно, объектив не находится в состоянии Busy, процесс переходит на этап 154. На этапе 154 несвязанные данные DATA_C2 устанавливаются в сдвиговый регистр передачи, и выполняется синхронная коммуникация.
Затем, как описано на этапе 104 на фиг.7, сменный объектив устанавливает сигнал CLK на уровень L выходного сигнала непосредственно после приема данных DATA_C2, так что выходным является импульс Tmes регулировки скорости передачи в бодах (этап 155). Если выводится импульс Tmes регулировки скорости передачи в бодах, начинается измерение времени посредством схемы 34 счетчика/таймера.
Если сменный объектив устанавливает сигнал CLK на уровень H выходного сигнала и, следовательно, оканчивается вывод импульса Tmes регулировки скорости передачи в бодах, измерение времени посредством схемы 34 счетчика/таймера завершается (этап 156). Измеренное схемой 34 счетчика/таймера значение вводится в микрокомпьютер 13 камеры. Микрокомпьютер 13 камеры распознает значение измерения в виде информации, относящейся к относительному сдвигу точности частоты колебаний для микрокомпьютера 21 объектива по отношению к точности частоты колебаний для микрокомпьютера 13 камеры. Скорость передачи в бодах, при осуществлении синхронной коммуникации, определяется в соответствии со сдвигом значения измерения схемой 34 счетчика/таймера по отношению к идеальному значению (этап 157). Микрокомпьютер 13 камеры изменяет установки для способа коммуникации со сменным объективом и выполняет установку для схемы 33 управления коммуникацией и схем 35-37 управления вводом-выводом, чтобы осуществлять асинхронную коммуникацию (этап 158). Соответственно, скорость передачи в бодах, определенная на этапе 157, устанавливается в схеме 33 управления коммуникацией. В последующем процессе обмен информацией со сменным объективом осуществляется согласно способу асинхронной коммуникации, как описано со ссылкой на фиг.8.
Если на этапе 116 по фиг.10 выносится решение, что сменным объективом является объектив I-типа, не являющийся доступным для асинхронной коммуникации, этапы, описанные со ссылкой на фиг.11, не выполняются, и обмен информацией со сменным объективом продолжается согласно способу синхронной коммуникации.
Последовательность операций коммуникации
для микрокомпьютера 21 объектива
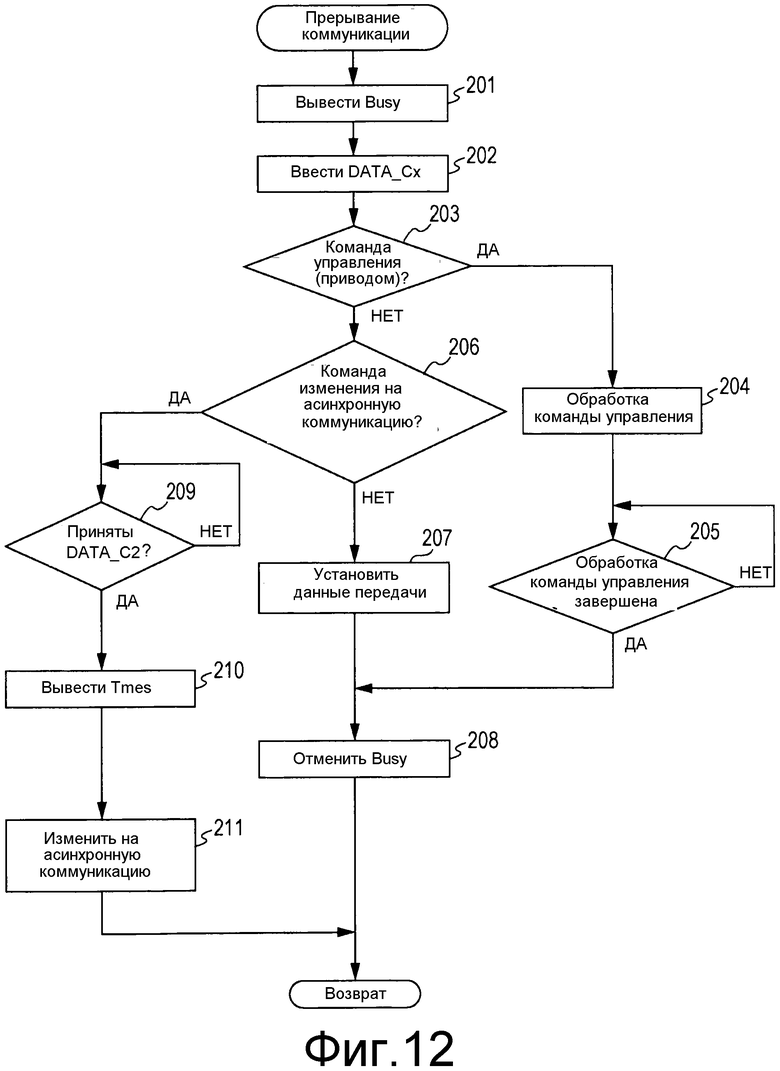
Затем, последовательность операций микрокомпьютера 21 объектива, относящаяся к обмену информацией с камерой, описывается со ссылкой на блок-схему на фиг.12.
Когда сменный объектив 2 подключается к камере 1, получает питание от камеры, и микрокомпьютер 21 объектива становится работоспособным, микрокомпьютер 21 объектива сначала выполняет установку параметров для схемы 33 управления коммуникацией и схем 35-37 управления вводом-выводом в качестве ведомого устройства для коммуникации согласно способу синхронизации. Эта установка была описана на этапе 101 по фиг.7. Если происходит прерывание вследствие синхронной коммуникации по отношению к камере в этом состоянии, исполняется последовательность операций.
Во-первых, вывод, который принимает синхронный тактовый сигнал CLK, устанавливается на уровень L, так что камера может принять решение, что объектив находится в состоянии Busy (этап 201). Вводятся данные передачи, DATA_C1, которые передаются от камеры и вводятся на сдвиговый регистр приема, и анализируется содержимое данных (этап 202). Хотя данными передачи от камеры являются DATA_C1, данные на блок-схеме именуются DATA_Cx, поскольку DATA_C2 и т.д. могут передаваться в последующем процессе.
Определяется, является ли содержимое данных передачи DATA_C1 от камеры командой управления для исполнительного устройства в объективе (этап 203).
Обработка управления для исполнительного устройства в объективе выполняется в соответствии с содержимым данных передачи DATA_C1 от камеры (этап 204). Затем, выносится решение, завершена ли обработка, относящаяся к управлению действием исполнительного устройства в объективе, и может ли объектив принимать следующую передачу от камеры (этап 205). Если объектив может принимать следующую передачу, процесс переходит на этап 208.
Если на этапе 203 содержимое данных передачи, DATA_C1, от камеры не является командой управления для исполнительного устройства в объективе, процесс переходит на этап 206. Выносится решение, является ли содержимое данных передачи, DATA_C1, от камеры запросом на вывод импульса Tmes регулировки скорости передачи в бодах, чтобы изменить коммуникацию на асинхронную коммуникацию (этап 206). Если вывод импульса Tmes регулировки скорости передачи в бодах не запрашивается, считается, что содержимым является запрос передачи данных относительно информации объектива, и процесс переходит на этап 207.
На этапе 207 данные информации объектива, запрошенной от камеры посредством данных передачи DATA_C1, устанавливаются в сдвиговый регистр передачи. Если запрошенной информацией объектива является информация объектива, указывающая тип и имя сменного объектива, или является ли сменный объектив новым типом, доступным для асинхронной коммуникации, устанавливаются данные информации. Вывод, который принимает синхронный тактовый сигнал CLK, устанавливается на уровень H, так что камера может принять решение, что объектив не находится в состоянии Busy (этап 208).
Если на этапе 206 содержимым данных передачи, DATA_C1, от камеры является запрос на вывод импульса Tmes регулировки скорости передачи в бодах для изменения коммуникации на асинхронную коммуникацию, процесс переходит на этап 209. На этапе 209 процесс ожидает осуществления передачи данных передачи, DATA_C2, которые используются в качестве синхронизирующего запускающего сигнала, чтобы выполнять вывод от камеры импульса регулировки скорости передачи в бодах. Между тем, как описано на этапе 104 на фиг.4, микрокомпьютер 21 объектива устанавливает в схеме 34 счетчика/таймера заранее заданное счетное значение для вывода импульса Tmes регулировки скорости передачи в бодах. При приеме данных процесс переходит на этап 210. Вывод, который принимает синхронный тактовый сигнал CLK, устанавливается на уровень L одновременно с началом счета схемой 34 счетчика/таймера (этап 210). Вывод, который принимает синхронный тактовый сигнал CLK, устанавливается на уровень H одновременно с завершением счета схемой 34 счетчика/таймера согласно заранее заданному значению. Таким образом, вывод импульсного сигнала Tmes регулировки скорости передачи в бодах завершается. Затем, микрокомпьютер 21 объектива изменяет установки параметров для способа коммуникации с камерой и выполняет установку для схемы 33 управления коммуникацией и схем 35-37 управления вводом-выводом для осуществления асинхронной коммуникации (этап 211). В последующем процессе обмен информацией с камерой осуществляется согласно асинхронной коммуникации, которая была описана со ссылкой на фиг.8.
Если сменный объектив, являющийся доступным для асинхронной коммуникации, подключен к камере, недоступной для асинхронной коммуникации, то не выполняются этапы от этапа 209 до этапа 211. В этом случае команда, запрашивающая вывод импульса Tmes регулировки скорости передачи в бодах, не передается от камеры. Следовательно, в этом случае, продолжается синхронная коммуникация.
Описание первого варианта осуществления окончено.
Модификация первого варианта осуществления
Вышеописанным первым вариантом осуществления является исполнение для показательной камеры и сменного объектива, являющиеся реализациями по настоящему изобретению. Однако исполнение охватывает не все возможные варианты осуществления.
Выходной вывод для импульса Tmes регулировки скорости передачи в бодах, который выводится объективом, как описано на этапе 105 и т.д. на фиг.7, не ограничивается CLK выводом согласно первому варианту осуществления. Выходной вывод может быть DOC выводом или DOL выводом. Например, если выходной вывод для импульса Tmes регулировки скорости передачи в бодах является DOL выводом, конфигурация схемы обеспечивается так, что если объектив выводит Tmes, сигнал вводится с DOL вывода на счетную/хронирущую схему 34 в камере. Кроме того, импульс Tmes регулировки скорости передачи в бодах, выводимый объективом, соответствует участку от спада до нарастания выходного сигнала согласно первому варианту осуществления. Однако это не ограничивается вариантом осуществления. Кроме того, если способ изменяется между способом «с открытым стоком» и способом CMOS, как описано в PTL 1, предпочтительно, что схема изменяется на способ CMOS, и затем объектив выводит импульс Tmes регулировки скорости передачи в бодах. Соответственно, искажение вследствие задержки меньше проявляется в форме выходного сигнала.
В первом варианте осуществления моментом времени вывода импульса Tmes регулировки скорости передачи в бодах, выводимого объективом, является непосредственно после приема DATA_C2. Однако это является просто примером и не ограничивается таким хронированием.
Во многих случаях характеристики электронных компонентов, таких как микрокомпьютер и генератор, используемый для генераторной схемы микрокомпьютера, могут изменяться в зависимости от температуры. Частота колебаний может часто изменяться в рамках некоторого диапазона вследствие изменения температуры. Таким образом, предпочтительно выполнять регулировку скорости передачи в бодах при другом хронировании в дополнение к моменту времени непосредственно перед изменением коммуникации от синхронной коммуникации на асинхронную коммуникацию, как описано на этапе 105 и т.д. на фиг.7. Для большей конкретности выходной сигнал датчика температуры 19 контролируется в некотором временном интервале в течение работы микрокомпьютера 13 камеры, и регулировка скорости передачи в бодах может выполняться, если происходит изменение температуры на заранее заданную величину или более высокую.
Второй вариант осуществления
В первом варианте осуществления камера измеряет время импульса Tmes регулировки скорости передачи в бодах, который выводится сменным объективом, с тем, чтобы камера выполняла регулировку скорости передачи в бодах. Альтернативно, объектив может измерять время относительно импульса Tmes регулировки скорости передачи в бодах, который выводится камерой, и объектив может передавать данные на камеру с тем, чтобы камера выполняла регулировку скорости передачи в бодах. Теперь, второй вариант осуществления описывается ниже со ссылкой на фиг.13-16.
Конфигурации камеры и объектива во втором варианте осуществления являются подобными описанным в первом варианте осуществления со ссылкой на фиг.1-3.
Последовательность операций установки параметров коммуникации
для микрокомпьютера 13 камеры
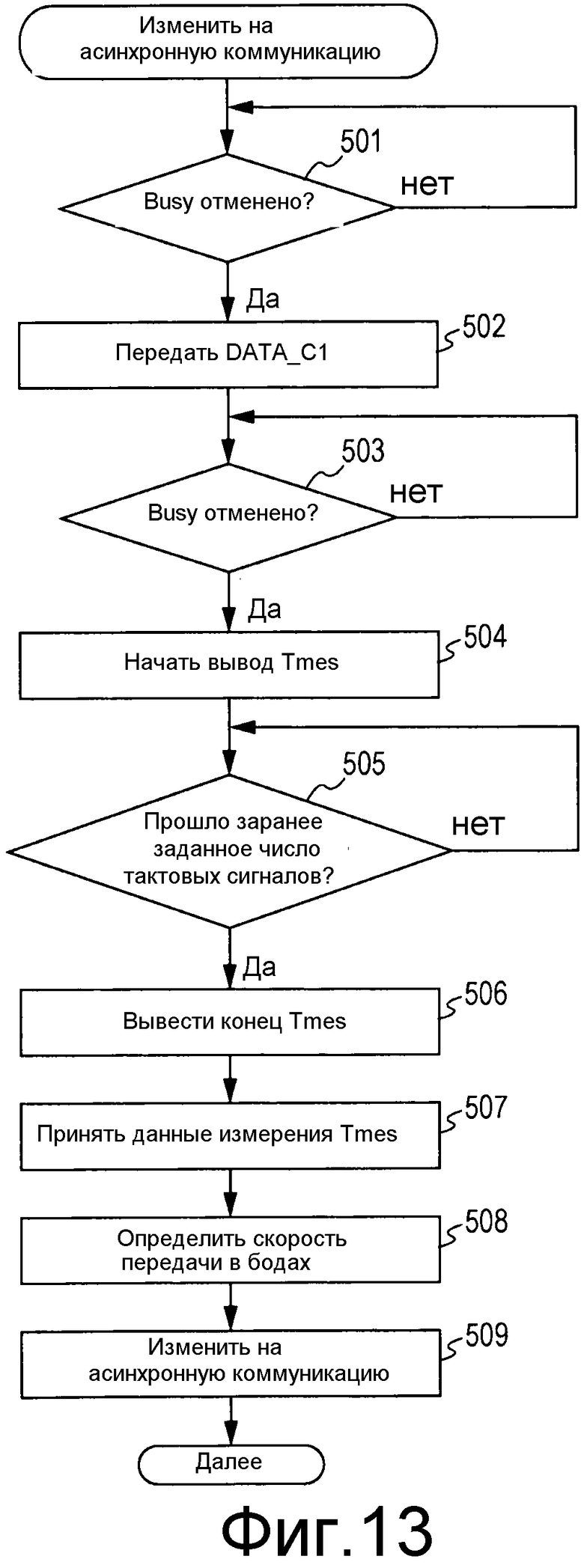
Последовательность операций для микрокомпьютера 13 камеры, относящаяся к установке параметров коммуникации со сменным объективом, начинается аналогично с этапа 111 по фиг.10. Выполняется процесс, подобный таковому, из первого варианта осуществления, и на этапе 116 по фиг.10 определяется, является ли текущий подключенный сменный объектив объективом II-типа, доступным для асинхронной коммуникации.
Если объективом является объектив II-типа, микрокомпьютер 13 камеры проверяет уровень входного сигнала для вывода, который выводит синхронный тактовый сигнал CLK и выносит решение, отменено ли состояние Busy объектива (этап 501). Если уровнем входного сигнала для вывода, который выводит сигнал CLK, является уровень H, и, следовательно, объектив не находится в состоянии Busy, процесс переходит на этап 502.
Данные DATA_C1, которые передаются на сменный объектив, устанавливаются в сдвиговый регистр передачи и осуществляется синхронная коммуникация (этап 502). Поскольку импульс измерения для регулировки скорости передачи в бодах, при осуществлении синхронной коммуникации, выводится на сменный объектив непосредственно после этой передачи, содержимым DATA_C1 является команда, которая запрашивает измерение длительности импульса для этого импульса.
Проверяется уровень входного сигнала для вывода, который выводит синхронный тактовый сигнал CLK, и выносится решение, отменяется или не отменяется состояние Busy для объектива (этап 503). Если вывод, который выводит сигнал CLK, имеет уровень H, и, следовательно, объектив не находится в состоянии Busy, процесс переходит на этап 504.
В ответ на отмену состояния Busy в объективе микрокомпьютер 13 камеры устанавливает сигнал CLK на уровень L выходного сигнала, чтобы начать вывод импульса Tmes регулировки скорости передачи в бодах (этап 504). При выводе импульса Tmes регулировки скорости передачи в бодах схема 34 счетчика/таймера 34 начинает измерение времени.
Процесс ожидает, пока схема 34 счетчика/таймера не окончит измерение времени в течение заранее заданного времени (этап 505). При окончании измерения времени в течение заранее заданного времени процесс переходит на этап 506. На этапе 506 сигнал CLK устанавливается на уровень H выходного сигнала, и, следовательно, вывод импульса Tmes регулировки скорости передачи в бодах окончен.
На фиг.16 показана временная диаграмма коммуникационных сигналов между камерой и сменным объективом на соответственных этапах от этапа 502 до этапа 506, описанных выше.
Объектив выводит Busy для сигнала CLK, и камера выводит Tmes.
Затем, микрокомпьютер 13 камеры запрашивает сменный объектив на передачу на камеру данных, полученных путем измерения времени вывода импульса Tmes регулировки скорости передачи в бодах (этап 507). Способ коммуникации здесь подобен таковому, описанному со ссылкой на фиг.9 и т.д. Данными DATA_C1, которые передаются на сменный объектив, являются команда запроса передачи относительно данных измерения импульса Tmes регулировки скорости передачи в бодах. Данными приема, DATA_L2, являются данные передачи от объектива в ответ на данные приема.
С помощью данных измерения для сменного объектива, полученных на этапе 507, микрокомпьютер 13 камеры может выявить информацию, относящуюся к относительному сдвигу точности и частоте колебаний для микрокомпьютера 21 объектива по отношению к точности частоты колебаний для микрокомпьютера 13 камеры. Скорость передачи в бодах, которая используется в качестве скорости передачи при осуществлении асинхронной коммуникации, определяется на основе информации (этап 508).
Затем, микрокомпьютер 13 камеры изменяет установку параметров для способа коммуникации со сменным объективом и выполняет установку для схемы 33 управления коммуникацией и схем 35-37 управления вводом-выводом, чтобы осуществлять асинхронную коммуникацию. Кроме того, скорость передачи в бодах, использующаяся в качестве скорости передачи данных и определенная на этапе 508, устанавливается в схеме 33 управления коммуникацией. Соответственно, коммуникация изменяется на асинхронную коммуникацию (этап 509). В последующем процессе обмен информацией со сменным объективом осуществляется согласно способу асинхронной коммуникации, как описано со ссылкой на фиг.8.
Последовательность операций коммуникации для микрокомпьютера 21 объектива
Затем, последовательность операций микрокомпьютера 21 объектива, относящаяся к коммуникации с камерой, согласно второму варианту осуществления описывается со ссылкой на блок-схемы на фиг.14 и 15.
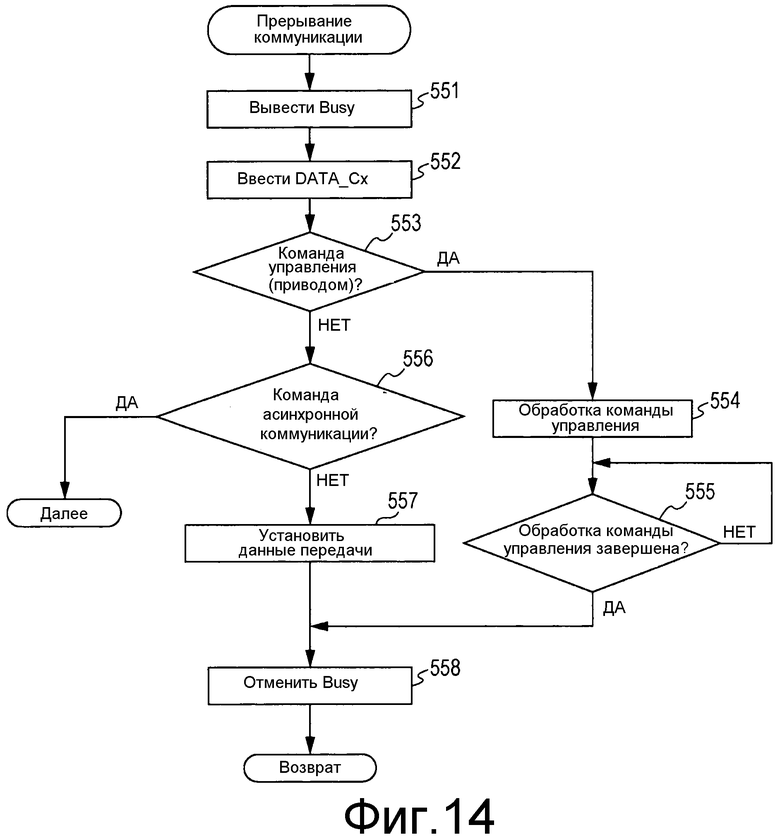
Если сменный объектив 2 подключен к камере 1, получает питание от камеры, и микрокомпьютер 21 объектива становится работоспособным, микрокомпьютер 21 объектива сначала выполняет установку для схемы 33 управления коммуникацией и схем 35-37 управления вводом-выводом в качестве ведомого устройства коммуникации согласно способу синхронной коммуникации. Если происходит прерывание вследствие синхронной коммуникации от камеры в этом состоянии, исполняется последовательность операций по фиг.14.
Вывод, который принимает синхронный тактовый сигнал CLK, устанавливается на уровень L, так что камера может принять решение, что объектив находится в состоянии Busy (этап 551). Вводятся данные передачи DATA_C1, которые передаются от камеры и вводятся на сдвиговый регистр приема, и содержимое данных анализируется (этап 552). Хотя данными передачи от камеры являются DATA_C1, данные на блок-схеме называются DATA_Cx, поскольку в последующем процессе могут передаваться DATA_C2 и т.д.
Определяется, является ли содержимое данных передачи DATA_C1 от камеры командой управления для исполнительного устройства в объективе (этап 553).
Если содержимое указывает команду управления для исполнительного устройства, выполняется обработка управления для исполнительного устройства в объективе в соответствии с содержимым данных DATA_C1, переданных от камеры (этап 554). Затем, выносится решение, завершена ли обработка, относящаяся к управлению действием исполнительного устройства в объективе, и объектив может принимать следующую передачу от камеры (этап 555). Если объектив может принимать следующую передачу, процесс переходит на этап 558.
Если на этапе 553 содержимое данных DATA_C1, переданных от камеры, не является командой управления для исполнительного устройства в объективе, процесс переходит на этап 556. На этапе 556 выносится решение, является ли содержимое данных DATA_C1, переданных от камеры, запросом на изменение коммуникации на асинхронную коммуникацию, запросом на исполнение измерения времени для импульса Tmes регулировки скорости передачи в бодах, или запросом на передачу результата измерения времени для импульса Tmes регулировки скорости передачи в бодах. Если содержимое не указывает ни один из вышеупомянутых запросов, считается, что содержимым является передача данных относительно информации объектива, и процесс переходит на этап 557.
На этапе 557 данные информации объектива, запрошенной посредством данных передачи, DATA_C1, от камеры, устанавливаются в сдвиговый регистр передачи. Если запрошенной информацией объектива является информация объектива, указывающая тип и имя сменного объектива, или является ли сменный объектив новым типом, доступным для асинхронной коммуникации, то устанавливаются данные информации. Вывод, который принимает синхронный тактовый сигнал CLK, устанавливается на уровень H, так что камера может принять решение, что объектив не находится в состоянии Busy (этап 558).
Если на этапе 556 содержимое данных DATA_C1, переданных от камеры, является запросом на изменение коммуникации на асинхронную коммуникацию, процесс переходит на этап 561 по фиг.15. Кроме того, если содержимым данных DATA_C1 является запрос на исполнение измерения времени для импульса Tmes регулировки скорости передачи в бодах или запрос на передачу результата измерения времени для импульса Tmes регулировки скорости передачи в бодах, процесс переходит на тот же этап.
На этапе 561 выносится решение, является ли содержимое данных DATA_C1, переданных от камеры, запросом на исполнение измерения времени для импульса Tmes регулировки скорости передачи в бодах. Если содержимое указывает исполнение измерения времени, процесс переходит на этап 562.
На этапе 562 вывод, который принимает синхронный тактовый сигнал CLK, устанавливается на уровень H, так что камера может принять решение, что объектив не находится в состоянии Busy. Процесс ожидает вывода камерой импульса Tmes регулировки скорости передачи в бодах в ответ на сигнал CLK (этап 563). При выводе камерой импульса Tmes регулировки скорости передачи в бодах схема 34 счетчика/таймера начинает измерение времени и измеряет время, пока импульс Tmes регулировки скорости передачи в бодах не будет соответствовать уровню H (этап 564).
Если на этапе 561 содержимое данных передачи, DATA_C1, от камеры не является исполнением измерения времени для импульса Tmes регулировки скорости передачи в бодах, процесс переходит на этап 565.
На этапе 565 проверяется, является ли содержимое данных DATA_C1, переданных от камеры, запросом на передачу результата измерения времени для импульса Tmes регулировки скорости передачи в бодах. Если (результатом проверки является) ДА, процесс переходит на этап 566.
На этапе 566 данные измерения времени для импульса Tmes регулировки скорости передачи в бодах, измеренного на этапе 564, устанавливаются в сдвиговый регистр передачи. Вывод, который принимает синхронный тактовый сигнал CLK, устанавливается на уровень H, так что камера может принять решение, что объектив не находится в состоянии Busy (этап 567). Затем, синхронный тактовый сигнал CLK выводится от камеры и исполняется последовательная передача. Соответственно, данные измерения времени для импульса Tmes регулировки скорости передачи в бодах передаются на камеру.
Если на этапе 565 содержимое данных передачи, DATA_C1, от камеры не является запросом на передачу результата измерения времени для импульса Tmes регулировки скорости передачи в бодах, то содержимое является запросом на изменение коммуникации на асинхронную коммуникацию. Процесс переходит на этап 568. На этапе 568 микрокомпьютер 21 объектива изменяет установки параметров для способа коммуникации с камерой и выполняет установку для схемы 33 управления коммуникацией и схем 35-37 управления вводом-выводом для осуществления асинхронной коммуникации. В последующем процессе обмен информацией с камерой осуществляется согласно асинхронной коммуникации, которая была описана со ссылкой на фиг.8.
Теперь окончено описание второго варианта осуществления.
Выходной вывод для импульса Tmes регулировки скорости передачи в бодах, выводимого камерой, как описано на этапе 504 и т.д. на фиг.13, не ограничивается выводом CLK согласно второму варианту осуществления. Выходной вывод может быть выводом DOC или выводом DOL. Кроме того, импульс Tmes регулировки скорости передачи в бодах, выводимый камерой, соответствует участку от спада до нарастания выходного сигнала.
Однако это не ограничивается вариантом осуществления. Если способ изменяется между способом «с открытым стоком» и способом CMOS, как описано в PTL 1, является предпочтительным, что схема изменяется на способ CMOS, и затем объектив выводит импульс Tmes регулировки скорости передачи в бодах, поскольку искажение вследствие задержки менее проявляется в форме выходного сигнала.
Во втором варианте осуществления моментом времени вывода импульса Tmes регулировки скорости передачи в бодах, выводимого от камеры, является непосредственно после отмены Busy в объективе. Однако это является просто примером и не ограничивается таким хронированием.
Во многих случаях характеристики электронных компонентов, таких как микрокомпьютер и генератор, используемые для генераторной схемы микрокомпьютера, могут изменяться в зависимости от температуры. Частота колебаний может часто изменяться в рамках некоторого диапазона вследствие изменения в зависимости от температуры. Таким образом, подобно первому варианту осуществления, является предпочтительным выполнять регулировку скорости передачи в бодах при другом хронировании в дополнение к моменту времени непосредственно перед изменением коммуникации от синхронной коммуникации на асинхронную коммуникацию, как описано выше.
Как описано в первом и втором вариантах осуществления, в случае объекта заявки, сменный объектив не должен выполнять обработку для вывода сигнала Busy или отмены состояния Busy всякий раз, когда происходит прерывание коммуникации. Рабочая характеристика может быть улучшена. Кроме того, поскольку скорость передачи данных определяется при изменении коммуникации между камерой и сменным объективом на способ асинхронной коммуникации, можно препятствовать появлению ошибки выборки для асинхронной коммуникации вследствие ошибки между частотами колебаний для камеры и сменного объектива. Соответственно, если высокоскоростная передача выполняется при наличии отдельной изменчивости, асинхронная коммуникация может исполняться надежно.
Настоящее изобретение не ограничивается вышеописанными вариантами осуществления, и могут выполняться различные изменения и модификации в рамках существа и объема настоящего изобретения. Следовательно, для раскрытия объема настоящего изобретения прилагается нижеследующая формула изобретения.
Перечень ссылочных символов
1 - камера
2 - сменный объектив
13 - микрокомпьютер камеры
15 - CLK вывод камеры
16 - DOC вывод камеры
17 - DOL вывод камеры
21 - микрокомпьютер объектива
25 - CLK вывод объектива
26 - DOC вывод объектива
27 - DOL вывод объектива
32 - схема формирования тактовых сигналов
33 - схема управления коммуникацией

Устройство съемки изображения, к которому может быть подключен сменный объектив, содержит первый и второй выводы для коммуникации со сменным объективом и средство управления коммуникацией. Если коммуникация осуществляется с подключенным сменным объективом, в синхронной коммуникации, в которой первый вывод выводит тактовый сигнал, принимается решение, является или не является подключенный сменный объектив доступным для асинхронной коммуникации, в которой первый вывод не выводит тактовый сигнал, продолжать синхронную коммуникацию, в которой первый вывод выводит тактовый сигнал, если выносится решение, что асинхронная коммуникация является недоступной, и определять скорость передачи данных для асинхронной коммуникации, в которой коммуникация осуществляется путем использования первого и второго выводов без тактового сигнала, если выносится решение, что асинхронная коммуникация является доступной. Технический результат - повышение объема передачи для коррекции оптических характеристик, повышение скорости непрерывной съемки и сохранение совместимости с объективом, не доступным для асинхронной коммуникации. 2 н. и 4 з.п. ф-лы, 16 ил.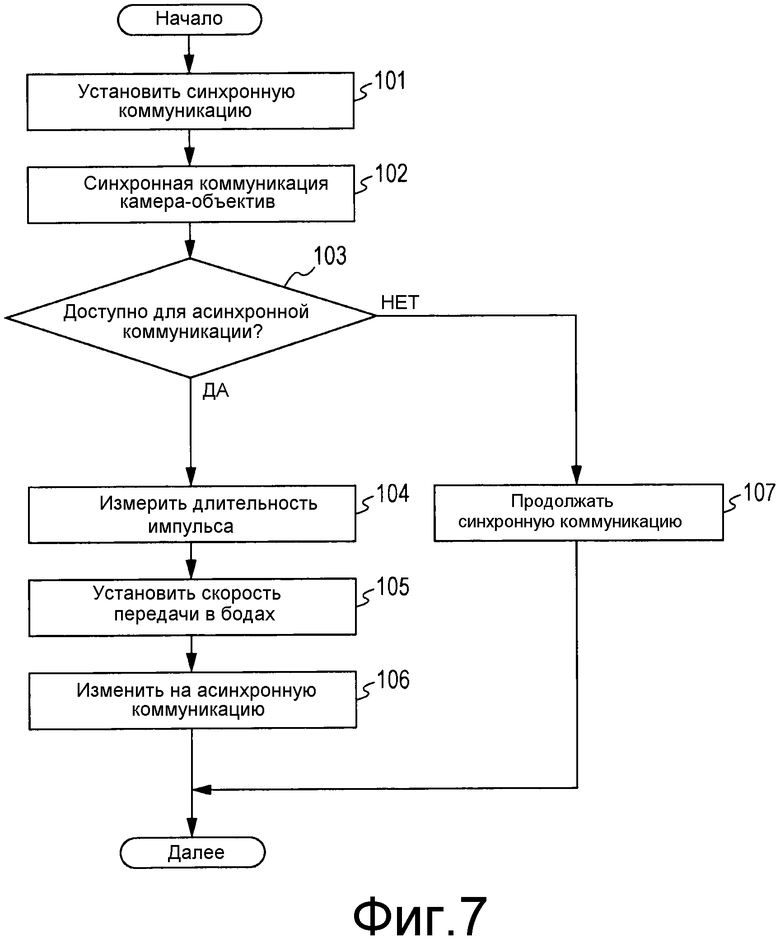
1. Устройство съемки изображения, к которому может быть подключен сменный объектив, причем устройство содержит
первый и второй выводы для коммуникации со сменным объективом и
средство управления коммуникацией, чтобы, если коммуникация осуществляется с подключенным сменным объективом, в синхронной коммуникации, в которой первый вывод выводит тактовый сигнал, принимать решение, является или не является подключенный сменный объектив доступным для асинхронной коммуникации, в которой первый вывод не выводит тактовый сигнал, продолжать синхронную коммуникацию, в которой первый вывод выводит тактовый сигнал, если выносится решение, что асинхронная коммуникация является недоступной, и определять скорость передачи данных для асинхронной коммуникации, в которой коммуникация осуществляется путем использования первого и второго выводов без тактового сигнала, если выносится решение, что асинхронная коммуникация является доступной.
2. Устройство съемки изображения по п.1, в котором в асинхронной коммуникации средство управления коммуникацией передает сигнал от первого или второго вывода на сменный объектив с определенной для асинхронной коммуникации скоростью передачи данных.
3. Устройство съемки изображения по п.1 или 2, в котором скорость передачи данных для асинхронной коммуникации определяется на основе выходного сигнала от второго вывода.
4. Сменный объектив, подключаемый к устройству съемки изображения, причем объектив содержит:
первый и второй выводы для коммуникации с устройством съемки изображения и
средство управления коммуникацией, чтобы, если коммуникация осуществляется с устройством съемки изображения с подключенным объективом, в синхронной коммуникации, в которой тактовый сигнал принимается первым выводом, принимать решение, является ли устройство съемки изображения с подключенным объективом доступным для асинхронной коммуникации, в которой тактовый сигнал не выводится на первый вывод, продолжать синхронную коммуникацию, в которой тактовый сигнал принимается первым выводом, если принято решение, что асинхронная коммуникация является недоступной, и осуществлять асинхронную коммуникацию, в которой коммуникация осуществляется путем использования первого и второго выводов без тактового сигнала, если принято решение, что асинхронная коммуникация является доступной.
5. Сменный объектив по п.4, в котором скорость передачи данных для асинхронной коммуникации определяется так, чтобы сменный объектив был управляемым для вывода сигнала в течение заранее заданного времени в ответ на команду от устройства съемки изображения, и устройство съемки изображения, которое принимает выводимый сигнал, определяет скорость передачи данных.
6. Сменный объектив по п.5, в котором сигнал в течение заранее заданного времени передается с использованием первого вывода.
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| JP 2009258558 A, 05.11.2009 | |||
| WO 2009139118 A1, 19.11.2009 | |||
| US 20090285572 A1, 19.11.2009 | |||
| WO 2009139173 A1, 19.11.2009 | |||
| JP 2002152576 A, 24.05.2002. | |||

