Изобретение относится к радионавигационным устройствам и может быть использовано для обеспечения безопасности движения маневровых локомотивов на железнодорожных станциях.
Известна интегрированная система передачи информации для железнодорожной станции, содержащая на посту электрической централизации дифференциальную станцию спутниковой радионавигации с блоком дифференциальных поправок координат спутниковой радионавигации, дешифратор служебных сообщений и коммутатор цифровых базовых радиостанций, на каждом маневровом локомотиве установлен бортовой блок управления, включающий локомотивную радиостанцию, приемник спутниковой радионавигации, исполнительный блок, информационное табло, последовательно соединенные определитель входа маневрового локомотива в систему, блок формирования служебных сообщений (RU 2417914 C1, B61L 25/02, 10.05.2011).
Бортовой блок управления в известной системе выполняет функции бортового навигационного устройства и является аналогом предлагаемого устройства.
Недостатком известного блока управления является отсутствие возможности определения достоверности координатно-временных параметров локомотива, а также невозможность интеграции с существующими локомотивными системами.
Наиболее близким по технической сущности к предлагаемому изобретению является бортовое устройство маневрового локомотива, входящее в состав многоуровневой системы управления и обеспечения безопасности движения поездов для крупных железнодорожных станций (RU 2403162 C1, B61L 27/00, 10.11.2010).
Бортовое устройство маневрового локомотива включает контроллер, блок индикации, блок управления, датчик импульсов, приемник спутниковой навигации с антенной, радиостанцию с антенной для обмена информацией по радиоканалу передачи данных с радиостанцией, входящей в состав станционного устройства, шкаф управления, подключенный к силовой и тормозной системам локомотива и электропневматической приставки, а станционное устройство включает также блок обработки и управления и референцную станцию с блоком формирования дифференциальных поправок.
Известное бортовое устройство в режиме реального времени обеспечивает в пределах станции постоянный мониторинг состояния движения локомотива, его местоположение и состояние электрооборудования локомотива, осуществляет обмен данными по радиоканалу со станционным устройством.
Однако бортовое устройство не обеспечивает уточнение координатно-временных параметров локомотива до пути, поскольку уточнение местоположения локомотива с учетом дифференциальной поправки осуществляет станционное устройство.
Технический результат изобретения заключается в повышении точности определения местоположения маневрового локомотива на любом участке станции и перегона за счет использования дифференциальной системы спутниковой навигации, в повышении достоверности определения координатно-временных параметров локомотива за счет привязки местоположения маневрового локомотива к железнодорожной карте и использования блока инерциальной навигационной системы, а также в возможности синхронизации данных измерений координатно-временных параметров маневрового локомотива и контролируемых параметров его движения, в исключении потерь данных в случае отсутствия связи за счет использования съемного носителя информации, на котором в режиме реального времени записаны все информационные сообщения за время проведения локомотивом технологических операций, а также в возможности обеспечения информационного обмена с внешними устройствами.
Указанный технический результат достигается тем, что навигационное коммуникационное мобильное устройство включает контроллер с подключенным к нему блоком индикации, приемник навигационных сигналов с антенной и радиостанцию с антенной, обеспечивающую информационный обмен по радиоканалам связи по стандарту GSM/GPRS с комплексом обработки данных, связанным с дифференциальной системой спутниковой навигации, микропроцессор с блоком индикации, входы/выходы которого соединены через соответствующие интерфейсы приема передачи данных с разъемами для возможности соединения с внешними устройствами, блок инерциальной навигационной системы, первый съемный носитель памяти с электронной картой станции, подключенный через соединительный разъем к соответствующему входу/выходу микропроцессора, другие входы/выходы которого соединены с выходами/входами радиостанции GSM/GPRS, приемника навигационных сигналов, блока инерциальной навигационной системы и контроллера, второй съемный носитель памяти, входом/выходом подключенный через другой соединительный разъем к соответствующему входу/выходу контроллера, другой вход/выход которого через CAN интерфейс подключен к разъему для соединения с выходом/входом бортового блока контроля параметров движения локомотива, и формирователь питающего напряжения, входом соединенный с разъемом для подключения к бортовой сети электропитания локомотива, при этом радиостанция GSM/GPRS снабжена адаптером Wi-Fi и слотами для двух сим-карт.
При этом микроконтроллер, контроллер, радиостанция, приемник навигационных сигналов, интерфейсы, формирователь питающего напряжения и блок инерциальной навигационной системы установлены в корпусе, размещенном в аппаратном шкафу вагона электропоезда или в кабине машиниста локомотива, разъемы размещены на внешней стороне корпуса, а в его крышку встроены панели блоков индикации, при этом антенны установлены на крыше локомотива.
Для возможности обеспечения информационного обмена микропроцессора с внешними устройствами используют интерфейсы RS232, RS485 и Ethernet.
Сущность изобретения поясняется чертежом.
На чертеже представлена структурная схема навигационного коммуникационного мобильного устройства маневрового локомотива.
Навигационное коммуникационное мобильное устройство маневрового локомотива включает контроллер 1 с подключенным к нему блоком 2 индикации, приемник 3 навигационных сигналов с антенной 4 и радиостанцию 5 с антенной 6, обеспечивающую информационный обмен по радиоканалам 7 связи по стандарту GSM/GPRS с комплексом 8 обработки данных, связанным с дифференциальной системой спутниковой навигации (на чертеже не показана), микропроцессор 9 с блоком 10 индикации, входы/выходы которого соединены через соответствующие интерфейсы 11, 12, 13 приема передачи данных с разъемами 14, 15, 16 для возможности подключения внешних устройств, блок 17 инерциальной навигационной системы, первый съемный носитель 18 памяти с электронной картой станции, подключенный через соединительный разъем 19 к соответствующему входу/выходу микропроцессора 9, другие входы/выходы которого соединены с выходами/входами радиостанции 5 GSM/GPRS, приемника 3 навигационных сигналов, блока 17 инерциальной навигационной системы и контроллера 1, второй съемный носитель 20 памяти, входом/выходом подключенный через другой соединительный разъем 21 к соответствующему входу/выходу контроллера 1, другой вход/выход которого через CAN интерфейс 22 подключен к разъему 23 для соединения с локомотивным блоком 24 контроля параметров движения локомотива, и формирователь 25 питающего напряжения, входом соединенный с разъемом 26 для подключения к бортовой сети электропитания локомотива, при этом радиостанция 5 GSM/GPRS снабжена адаптером 27 Wi-Fi и слотами 28 для двух сим-карт.
При этом микропроцессор 9, контроллер 1, радиостанция 5, приемник 3 навигационных сигналов, интерфейсы 11, 12, 13, 22, формирователь 25 питающего напряжения, блок 17 инерциальной навигации установлены в корпусе 29, на внешней стороне которого размещены разъемы 14, 15, 16, 19, 21, 23, 26, панели блоков 2, 10 индикации встроены в крышку корпуса, корпус установлен в аппаратном шкафу вагона электропоезда или в кабине машиниста локомотива, а антенны 4, 6 - на крыше локомотива.
Устройство работает следующим образом.
Навигационное коммуникационное мобильное устройство маневрового локомотива устанавливают в аппаратном шкафу вагона электропоезда или в кабине машиниста локомотива.
Формирователь 25 питающего напряжения устройства через разъем 26 подключается к бортовой сети электропитания локомотива. При этом формирователь 26 питающего напряжения имеет гальваническую развязку от устройств электропитания маневрового локомотива.
Антенны 4 и 6 размещены на крыше локомотива и обеспечивают соответственно прием сигналов в диапазонах частот GSM/GPRS/Wi-Fi и сигналов GPS/ГЛОНАСС.
Стабильность связи в диапазонах частот GSM/GPRS/Wi-Fi радиостанции 5 обеспечивается за счет дополнительно введенного в радиостанцию 5 адаптера 27 Wi-Fi. Использование слота 28 на две сим-карты позволяет подключать сим-карты различных провайдеров связи.
Устройство функционирует в автоматическом режиме и обеспечивает непрерывную круглосуточную работу с остановкой на обслуживание не менее чем через каждые 100 часов.
Перед началом работы маневрового локомотива к навигационному коммуникационному мобильному устройству подключают:
- первый носитель 18 съемной памяти - к разъему 19;
- второй съемный носитель 20 памяти, выполненный в виде флеш-карты, - к разъему 21;
- блок 24 контроля параметров движения локомотива - к разъему 23;
- внешние устройства (на чертеже не показаны) - к разъемам 14, 15, 16.
Носитель 18 съемной памяти содержит электронную карту станции в виде векторных карт привязки географических координат к железнодорожным объектам.
В качестве внешних устройств можно использовать, например:
- автоматизированную систему подогрева тепловоза (АСПТ);
- систему контроля бодрствования машиниста (СКБМ);
- регистратор параметров расхода топлива (РПРТ).
Внешние устройства контроля подключают к микропроцессору 9 через соответствующие интерфейсы 11, 12, 13. Например, автоматизированная система подогрева тепловоза подключена к микропроцессору 9 через Ethernet-интерфейс 11.
После включения и инициализации навигационного коммуникационного мобильного устройства радиостанция 5 автоматически устанавливает через радиоканалы 7 GSM/GPRS соединение с комплексом 8 обработки данных, размещенным в центральном информационном вычислительном центре железнодорожного транспорта.
Комплекс 8 обработки данных передает в микропроцессор 9 через радиостанцию 5 в режиме реального времени данные о дифференциальной поправке навигационных сигналов, полученные от базовой станции дифференциальной системы спутниковой навигации (на чертеже не указана).
Микропроцессор 9 значения дифференциальной поправки направляет в приемник 3 навигационных сигналов.
Приемник 3 навигационных сигналов в режиме реального времени принимает сигналы спутниковой системы навигации, обрабатывает их по заданному алгоритму с учетом дифференциальной поправки и отправляет в микропроцессор 9. Кроме того, приемник 3 направляет в микропроцессор 9 данные о точном времени, скорости и направлении движения локомотива. Формат данных, получаемых от навигационного приемника 3, - NMEA GPRMS. Временной интервал обновления данных от навигационного приемника 3 - не менее 1 с.
Микропроцессор 9 запрашивает со съемного носителя 18 памяти данные векторной карты привязки географических координат к железнодорожным объектам станции. На основании географических координат маневрового локомотива и векторной карты микропроцессор 8 определяет в режиме реального времени номер пути, на котором в данный момент времени находится маневровый локомотив. По результатам сравнения географических координат маневрового локомотива с координатами определенного пути микропроцессор 8 формирует признак достоверности координатно-временных параметров локомотива.
Кроме того, в микропроцессор 9 поступают данные блока 17 инерциальной навигационной системы.
Блок 17 инерциальной навигационной системы включает инерциальный датчик и альтиметр.
С помощью инерциального датчика блок 17 определяет изменения положения локомотива, а с помощью альтиметра - давление атмосферного воздуха, на основании которого определяет изменения высоты положения локомотива над уровнем моря.
Микропроцессор 9 в режиме реального времени обрабатывает данные блока 17 инерциальной навигационной системы и системы спутниковой навигации и по результатам их сравнения формирует признак достоверности координатно-временных параметров локомотива.
Кроме того, микропроцессор 9 формирует признак учета данных блока 17 инерциальной навигационной системы.
На микропроцессор 9 в режиме реального времени через соответствующие интерфейсы 11, 12 и 13 поступает также информация от внешних устройств, которая также обрабатывается микропроцессором 9.
При этом микропроцессор 9 осуществляет контроль функционирования режимов интерфейсов 11-13 и формирователя 25 питающего напряжения и обеспечивает светодиодную индикацию результатов контроля на табло блока 10.
Микропроцессор 9 в режиме реального времени автоматически формирует блок данных, в котором присутствуют идентификационный номер сообщения; идентификационный номер маневрового локомотива; значения географических координат дислокации объекта (широта и долгота); значения даты и времени для временной зоны Гринвичского меридиана (формат UTC), соответствующие моменту определения навигационного решения; значения скорости и направления движения объекта; признак достоверности определения координатно-временных параметров; признак учета данных инерциальной системы; признак отключения электропитания устройства, а также данные, поступающие от внешних устройств.
Блок данных микропроцессор 9 направляет в контроллер 1.
Через CAN интерфейс 22 в режиме реального времени на другой вход контроллера 1 поступают данные с бортового блока 24 контроля параметров движения локомотива. Контроллер 1 синхронизирует по времени данные блока 24 контроля с данными, представленными микропроцессором 9, и формирует информационное сообщение, в которое включает блок данных, сформированный микропроцессором 9, и данные блока 24. Сформированное информационное сообщение контроллер 1 передает на съемный носитель 20 памяти для хранения и в микропроцессор 9.
Микропроцессор 9 направляет информационное сообщение на вход радиостанции 5 для передачи его по радиоканалу 7 связи на комплекс 8 обработки данных. Передача информационных сообщений о значениях навигационных параметров, синхронизированных по времени с данными блока 24 контроля параметров движения локомотива, осуществляется по протоколу TCP/IP. Среднее значение временного интервала передачи информационных сообщений составляет 5 с.
Контроллер 1 осуществляет также контроль функционирования режимов CAN интерфейса 22 и формирователя 25 питающего напряжения и обеспечивает светодиодную индикацию результатов контроля на табло блока 2.
Кроме того, контроллер 1 направляет в бортовой блок 24 контроля параметров движения локомотива через CAN интерфейс 25 сообщение о местонахождении маневрового локомотива.
В случае нарушения радиоканала 7 связи между радиостанцией 5 и комплексом 8 обработки данных радиостанция 5 формирует соответствующий сигнал и направляет его в микропроцессор 9, который регистрирует время его поступления. После восстановления связи передача данных начинается с той части информации, которая не была передана.
Для чего микропроцессор 9 через контроллер 1 запрашивает с носителя 20 памяти данные, начиная со времени регистрации сигнала нарушения радиоканала 7 связи, и направляет их на вход радиостанции 5 для последующей передачи в комплекс 8 обработки данных. Использование носителя 20 памяти, на который в режиме реального времени записаны все информационные сообщения, предназначенные для передачи в комплекс 8 обработки данных, исключает потерю данных.
Выполнение носителя 20 памяти съемным позволяет также использовать его в качестве источника информации для анализа работы локомотива за период проведения технологических операций.
Таким образом, предлагаемое навигационное коммуникационное мобильное устройство маневрового локомотива позволяет повысить точность определения местоположения маневрового локомотива на любом участке станции и перегона, повысить достоверность определения координатно-временных параметров локомотива, обеспечить передачу в комплекс обработки информационных сообщений, включающих данные о координатно-временных параметрах и параметрах движения маневрового локомотива спутниковой системы навигации, синхронизированных по времени с данными параметров его движения, контролируемых бортовым блоком контроля, исключить потери данных в случае отсутствия радиосвязи, а также обеспечить возможность информационного обмена с внешними устройствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| Бортовое навигационное коммуникационное устройство | 2017 |
|
RU2657152C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ УСТРОЙСТВОМ ЛУБРИКАЦИИ НА ЛОКОМОТИВЕ-РЕЛЬСОСМАЗЫВАТЕЛЕ | 2011 |
|
RU2478506C1 |
| УСТРОЙСТВО ИНТЕЛЛЕКТУАЛЬНОЙ БОРТОВОЙ АППАРАТУРЫ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2012 |
|
RU2487035C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| ТРЕК ТАХОГРАФ | 2011 |
|
RU2475704C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| ТЕХНОЛОГИЯ ОРГАНИЗАЦИИ ЦИФРОВОГО РАДИОКАНАЛА ПЕРЕДАЧИ ДАННЫХ ДЛЯ СИСТЕМ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2419569C1 |
Изобретение относится к радионавигационным устройствам для обеспечения безопасности движения локомотивов. Навигационное коммуникационное мобильное устройство маневрового локомотива включает контроллер с подключенным к нему блоком индикации, приемник навигационных сигналов и радиостанцию. Дополнительно в устройство введены микропроцессор с блоком индикации, соединенный через соответствующие интерфейсы приема передачи данных с разъемами для возможности соединения с внешними устройствами, и блок инерциальной навигационной системы. Первый съемный носитель памяти с электронной картой станции соединен с радиостанцией GSM/GPRS приемника навигационных сигналов. Также имеется второй съемный носитель памяти, подключенный к контроллеру, который через CAN интерфейс подключен к бортовому блоку контроля параметров движения локомотива, и формирователь питающего напряжения, соединенный с бортовой сетью электропитания локомотива. При этом радиостанция GSM/GPRS снабжена адаптером Wi-Fi и слотами для двух сим-карт. 2 з.п. ф-лы, 1 ил.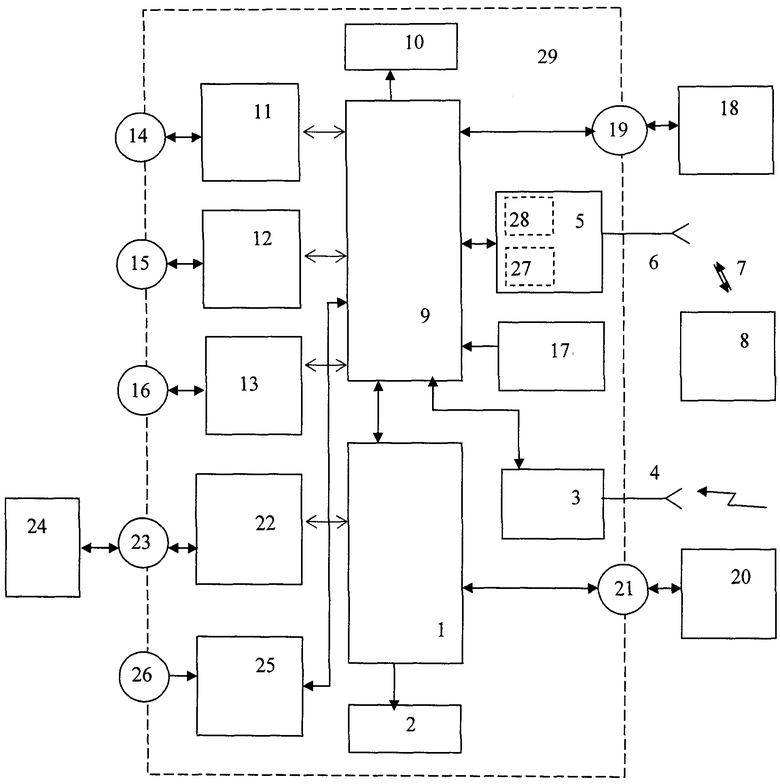
1. Навигационное коммуникационное мобильное устройство маневрового локомотива, включающее контроллер с подключенным к нему блоком индикации, приемник навигационных сигналов с антенной и радиостанцию с антенной, обеспечивающую информационный обмен по радиоканалам связи по стандарту GSM/GPRS с комплексом обработки данных, связанным с дифференциальной системой спутниковой навигации, отличающееся тем, что в него введены микропроцессор с блоком индикации, входы/выходы которого соединены через соответствующие интерфейсы приема передачи данных с разъемами для возможности соединения с внешними устройствами, блок инерциальной навигационной системы, первый съемный носитель памяти с электронной картой станции, подключенный через соединительный разъем к соответствующему входу/выходу микропроцессора, другие входы/выходы которого соединены с выходами/входами радиостанции GSM/GPRS, приемника навигационных сигналов, блока инерциальной навигационной системы и контроллера, второй съемный носитель памяти, входом/выходом подключенный через другой соединительный разъем к соответствующему входу/выходу контроллера, другой вход/выход которого через CAN интерфейс подключен к разъему для соединения с выходом/входом бортового блока контроля параметров движения локомотива, и формирователь питающего напряжения, входом соединенный с разъемом для подключения к бортовой сети электропитания локомотива, при этом радиостанция GSM/GPRS снабжена адаптером Wi-Fi и слотами для двух сим-карт.
2. Устройство по п.1, отличающееся тем, что микроконтроллер, контроллер, радиостанция, приемник навигационных сигналов, интерфейсы, формирователь питающего напряжения и блок инерциальной навигационной системы установлены в корпусе, размещенном в аппаратном шкафу вагона электропоезда или в кабине машиниста локомотива, разъемы размещены на внешней стороне корпуса, а в его крышку встроены панели блоков индикации, при этом антенны установлены на крыше локомотива.
3. Устройство по п.1 или 2, отличающееся тем, что для обеспечения информационного обмена микропроцессора с внешними устройствами используют интерфейсы RS232, RS485 и Ethernet.
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| Хонинговальная головка | 1950 |
|
SU92642A2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ ДЛЯ ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ | 2009 |
|
RU2417914C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ МАНЕВРОВОГО ЛОКОМОТИВА | 2005 |
|
RU2284275C1 |

