Устройство относится к области железнодорожной автоматики и телемеханики, а именно к устройствам автоматики управления торможением.
Известно устройство автоматической локомотивной сигнализации, содержащее локомотивные и путевые блоки для передачи по рельсовой линии и реализации кодов автоматической локомотивной сигнализации при управлении движением поезда (см. Леонов А.А. Техническое обслуживание автоматической локомотивной сигнализации. - М.: "Транспорт", 1982 г., 255 с.). Однако оно не предназначено для маневровой работы.
Известно устройство маневровой автоматической локомотивной сигнализации, которое содержит локомотивные станционные блоки связанные радиоканалом, для передачи информации по управлению маневровым локомотивом с центрального поста (см. Кочнев А.В. "Маневровая автоматическая локомотивная сигнализация", "Автоматика, связь и информатика", №4, 2000 г., 43-47 с.).
Однако данное устройство не обеспечивает автоматически прицельное торможение.
Известно устройство автоматического управления торможением, содержащее на локомотиве блоки, обеспечивающие автоматическое прицельное торможение перед закрытым сигналом светофора (см. Никифоров Б.Д. и др. Автоматизация управления тормозами поездов. - М.: "Транспорт", 1985 г., 263 с.).
Однако данное устройство не применяется при маневровой работе.
Наиболее близким по технической сущности является устройство, содержащее установленные на пути блоки кодирования, блок электрической централизации и установленные на локомотиве блок автоматической локомотивной сигнализации, датчик пути и скорости, скоростемер, блок индикации, блок сравнения, блок управления тормозами, тягой и контроллером управления тяговыми электродвигателями (см. Кравцов Ю.А. и др. Система железнодорожной автоматики и телемеханики - учебник для ВУЗов. - М.: "Транспорт", 1996 г., 400 с., рис 5.10, 5.13 и 5.14). В прототипе используется автоматическая локомотивная сигнализация совместно с системой автоматического управления тормозами.
Однако у прототипа тот же недостаток, что и у аналогов, поскольку они не исключают возможность столкновения подвижного состава на станции при маневровой работе.
Техническим результатом, на достижение которого направлено данное изобретение, является повышение безопасности маневровой работы благодаря прицельной остановке подвижного состава перед закрытым станционным светофором и обеспечению движения состава со скоростью, не превышающей допустимую в каждой точке пути маневрового маршрута.
Существенным отличием изобретения является введение на локомотиве блока вычисления программной скорости, которая определяется для любой точки маневрового маршрута на основании информации о тормозных характеристиках локомотива, его координаты, расстоянии до закрытого светофора, ограничения скорости движения по участкам станции и длины вагонов.
Технический результат достигается тем, что устройство автоматического управления торможением маневрового локомотива снабжено установленными на локомотиве блоком приемника спутниковой навигационной системы и электронной карты, блоком вычисления программной скорости, блоком измерения ускорения, входом подключенным к выходу скоростемера, блоком определения остановки, входом подключенного к датчику пути и скорости, концевыми выключателями, блоком определения положения вагонов одним и вторым входами подключенными к концевым выключателям, а третьим входом - к выходу конроллера управления тяговыми двигателями, блоком определения длины вагонов, одним входом подключенным к выходу блока определения положения вагонов, а вторым входом - к контроллеру управления тяговыми двигателями, блоком памяти ускорения одним входом подключенный к выходу блока измерения ускорения, а вторым входом - к выходу блока определения остановки, третьим входом - к контроллеру управления тяговыми двигателями, а выходом - к третьему входу блока определения длины вагонов, выход которого подключен к одному входу блока вычисления программной скорости, второй вход которого соединен с выходом блока памяти ускорения, третий вход - к выходу блока автоматической локомотивной сигнализации, а четвертый вход - к выходу блока приемника спутниковой навигационной системы и электронной карты, входом соединенной с контроллером управления тяговыми двигателями, выход блока вычисления программной скорости подключен к другому входу блока сравнения и входу блока локомотивной индикации.
На фиг.1 показана функциональная схема предложенного устройства.
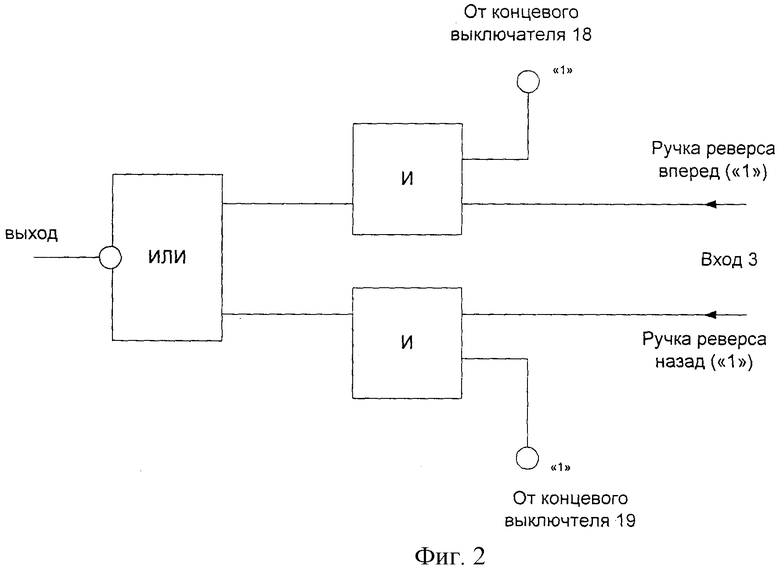
На фиг.2 - функциональная схема блока 17 определения положения вагонов на фиг.1.
Устройство содержит установленные на пути существующие светофоры 1 и 2 и рельсовые цепи 3, 4 и 5, к которым подключен блок 6 кодирования, соединенный с электрической централизацией 7. Локомотивные катушки 8 принимают код автоматической локомотивной сигнализации (АЛС), который расшифровывается блоком 9 АЛС и передается на локомотивный контроллер 23. При вращении колеса локомотива датчик 10 пути и скорости вырабатывает импульсы, которые поступают на вход скоростемера 11, с выхода которого фактическая скорость локомотива поступает на один вход блока 12 сравнения, на другой вход которого поступает допустимая скорость. Выход блока 12 соединен с блоком 13 управления тормозами и вызовет отключение тяги и торможение состава, если фактическая скорость больше допустимой. Блок 14 памяти ускорения после обнуления во время остановки состава сигналом с блока 15 определения остановки, запоминает величину максимального ускорения во время разгона, поступающую из блока 16 измерения ускорения. Блок 17 определения положения вагонов фиксирует с какой стороны к автосцепке подключен состав с помощью концевых выключателей 18 или 19, расположенных в области автосцепки с каждой стороны. С выхода блока 17 сигнал поступает на один вход блока 20 определения длины вагонов, с выхода которого информация о длине отцепа поступает на вход блока 21 вычисления программной скорости, который на выходе выдает допустимую скорость движения на другой вход блока 12 сравнения. Приемник спутниковой навигационной системы и электронная карта 22 дают координату локомотива и координату впереди расположенного светофора после поступления сигнала от контроллера 23 о направлении движения.
Устройство автоматического управления торможением маневрового локомотива работает следующим образом.
Для маневрового передвижения с участка, оборудованного рельсовой цепью 3 перед маневровым светофором 1 на рельсовую цепь 5 перед светофором 2, дежурный по станции открывает маневровый светофор 1 и блок кодирования 6 передает в рельсовые цепи по маршруту соответствующие коды. Перед маневровом светофором 1 передается код, разрешающий движение (Ж - если используется аппаратура числового кода), а перед светофором 2 передается код КЖ в рельсовые цепи 5 на пути и в стрелочную секцию 4 с двух сторон, учитывая возможность нахождения вагонов спереди или сзади локомотива. Эти коды принимаются на локомотиве через локомотивные катушки 8 на блок АЛС 9, с выхода которого информация о коде передается на блок 24 локомотивной индикации и передается на блок 21 вычисления программной скорости, расчет которой производится непрерывно для любой точки пути движения локомотива по маршруту в зависимости от тормозных характеристик локомотива, его координаты, расстояния до закрытого светофора, ограничении скорости движения по участкам станции и длины вагонов (если локомотив их толкает). Тормозные характеристики локомотива зависят от количества (массы вагонов) и определяются по максимальному ускорению, которое имеет локомотив при разгоне на определенной позиции контроллера 23 управления тяговыми двигателями. Такой принцип основан на том, что при маневрах тормозная магистраль отключена. Поэтому торможение и разгон производит при маневрах только локомотив и максимальное ускорение разгона по условиям обеспечения сцепления колесных пар с рельсами без буксования будет всегда пропорционально максимально допустимому ускорению торможения без "юза". Поэтому чем больше максимальное ускорение имеет локомотив, тем меньше масса вагонов и меньше будет длина тормозного пути. Определение максимального ускорения на определенной позиции контроллера 23 осуществляет блок 16 измерения ускорения, в который непрерывно подается значение фактической скорости из скоростемера 11, связанного с датчиком 10 пути и скорости. Измерение ускорения производится при каждом трогании локомотива с места, так как при остановке всегда может измениться число прицепленных к локомотиву вагонов. Поэтому при остановке локомотива блок 15 определения остановки, связанный с датчиком 10, обнуляет информацию об ускорении из блока 14 памяти ускорения, а при трогании записывается в блок 14 новая информация об максимальном ускорении и номере позиции контроллера 23.
Длина вагонов учитывается при прицельном торможении в случае их расположения перед локомотивом (в этом случае длина тормозного пути локомотива будет меньше на длину вагонов).
Для определения длины вагонов используется также максимальное ускорение, так как чем больше длина вагонов, тем больше их масса и меньше максимальное ускорение, которое будет измерено при разгоне, и наоборот - большему ускорению соответствует малая длина вагонов. Учитывая, что может быть разная длина вагонов при различной их массе за счет разной степени загруженности (при груженных вагонах их масса больше), в расчетах длины вагонов следует принимать всегда максимально возможную длину (т.е. считать что всегда будут порожние вагоны), чтобы исключить остановку подвижного состава уже после проезда закрытого светофора. В случае остановки на большом расстоянии перед светофором на локомотиве предусматривается режим "подтягивание" (как в САУТ). На основании вышеизложенного принципа работает блок 20 определения длин вагонов. Получая информацию об ускорении из блока 14, информация о длине вагонов передается в блок 21 вычисления программной скорости только в случае, если вагоны будут впереди локомотива, что определяет блок 17 определения положения вагонов и дает команду на передачу длины вагонов из блока 20 в блок 21. Определение положения вагонов производится по состоянию концевых выключателей 18 или 19, расположенных по обе стороны локомотива и фиксирующих нахождение вагонов по положению рукоятки контролера 23 управления тяговыми двигателями.
Для определения координат локомотива на станции используется электронная карта станции и приемник 22 спутниковой навигационной системы, которые дают информацию в блок 21 о месте нахождения локомотива и расстоянии до впереди расположенного светофора после остановки и начала движения в соответствии с направлением движения, которое передается в блок 22 из контроллера 23 управления тяговыми двигателями.
На основании полученной информации блок 21 вычисления программной скорости непрерывно определяет и выдает значение программной скорости на блок 12 сравнения, где идет ее сравнение с фактической скоростью, подаваемой от скоростемера 11. Значения фактической и программной скоростей, а также расстояние до закрытого светофора, отображаются в блоке 24 локомотивной индикации.
При превышении фактической скорости над программной с выхода блока 12 идет воздействие на блок 13 управления тормозами и отключения тяги локомотива, который и осуществляет служебное торможение до допустимого значения для полной остановки перед светофором или снижения скорости до допустимого значения в местах ее ограничения.
Датчик 10 выдает определенное количество импульсов на каждый оборот колес, скоростемер 11 подсчитывает количество импульсов за единицу времени и определяет скорость движения состава.
Дифференцируя показания скоростемера 11, блок 16 выдает информацию об ускорении состава (т.е. степень его разгона), определяется прирост числа импульсов за предыдущий и последовательный отрезок времени. Блок 15 определяет наличие или отсутствие импульсов на выходе датчика 10 (импульсный дешифратор), при пропадании импульсной "работы" на его выходе появляется сигнал обнуляющий блок 14, который представляет собой регистр, хранящий максимальное значение ускорения во время разгона состава, которое поступает в блок 14 из блока 16. Блок 20 представляет собой элемент памяти, в который заложены данные, соответствующие определенному ускорению разгона, при определенном положении контроллера 23 определенной массе состава 2. Каждой кривой разгона на своей позиции контроллера 23 соответствует определенное ускорение, которое определяется совместным весом локомотива и состава. Это определяется формулой:
Fт=maр
Fт - сила тяги локомотива при определенной позиции контроллера;
ар - ускорение разгона;
m - масса локомотива и состава.
Длина состава будет определяться из расчета массы состава, считая что все вагоны порожние. Максимально возможная длина состава будет связана с массой. Таким образом в блоке 20 при фиксированном максимальном ускорении разгона состава при определенном положении контроллера 23 происходит расчет максимально возможной длины состава. Блок 20 на выходе в зависимости от положения контроллера 23 и полученного при этом ускорения выдает длину вагонов (теоретически максимально возможную). Чтобы осуществить прицельное торможение, если состав движется вагонами впереди локомотива, из длины тормозного пути необходимо вычесть длину вагонов. Для определения, где находятся вагоны, существует блок 17, который представляет собой две схемы "и", которые сравнивают совпадения состояния концевого выключателя 18 или 19 с положением ручки реверса контроллера 23, а выходами соединены с входами схемы "или" (фиг.2). Если они совпадают, то вагоны впереди и их длину надо вычитать из тормозного пути. Блок 20 определяет длину состава и выдает эту информацию в блок 21, при условии, что состав двигается вагонами вперед и выдает нуль, если локомотив находится во главе состава. Из блока 22 заносится в регистр расстояние до препятствия. Далее в блоке 21 по информации из блока 14 об максимальном ускорении и позиции контроллера 23 выбирается в элементе памяти блока 21 кривая торможения. По кривой торможения исходя из фактического оставленного расстояния до остановки элемент памяти в соответствии с выбранной кривой торможения выбирает допустимую скорость движения, которая и выдается на вход блока 12 сравнения. Контроллер 23 управления тяговыми двигателями по одному проводу выдает сигнал, когда ручка реверса включена вперед, и по другому проводу, когда ручка реверса включена назад (не показано). Кроме того локомотивный индикатор 24 выдает информацию о контроллере 23, номере позиции, т.е. где и на какой ступени находится рукоятка управления тяги (не показано).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2010 |
|
RU2422315C1 |
| Комплексная система управления маневровыми локомотивами | 2019 |
|
RU2725575C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2277054C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| ТРЕНАЖЕР ДЛЯ ПРОФЕССИОНАЛЬНОЙ ПОДГОТОВКИ МАШИНИСТОВ ЛОКОМОТИВОВ И ОБСЛУЖИВАЮЩЕГО ПЕРСОНАЛА | 2015 |
|
RU2596042C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ У ПУТЕВЫХ УПОРОВ ПРИ ДВИЖЕНИИ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИИ | 2013 |
|
RU2529561C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
Изобретение относится к железнодорожной автоматике и предназначено для маневровой работы локомотива. Блок кодирования (6) подключен к рельсовым цепям (3, 4, 5). Вход блока кодирования (6) подключен к выходу блока электрической централизации (7). Блок автоматической локомотивной сигнализации (9) подключен входом к локомотивным катушкам (8). Выход блока (9) подключен к блоку индикации (24) и блоку вычисления программной скорости (21). Датчик пути и скорости (10) соединен через скоростемер (11) с блоком индикации (24) и блоком сравнения (12). Блок сравнения подключен к блоку управления тормозами и тягой (13). Контроллер управления подключен выходом к блоку спутниковой навигационной системы и электронной карты (22), блоку определения положения вагонов (17), блоку памяти ускорения (14), блоку определения длины вагонов (20). Выход блоков концевых выключателей (18, 19) подключен к блоку (17). Выход блока (17) подключен к блоку определения длины вагонов (20). Выход блока определения длины вагонов (20) подключен к блоку вычисления программной скорости (21). Вход блока определения длины вагонов (20) подключен к выходу блока памяти ускорения (14). Входы блока (14) подключены к выходам блоков определения остановки (15), блока измерения ускорения (16) и выходу контроллера (23). Техническим результатом является повышение безопасности маневровой работы локомотива. 2 ил.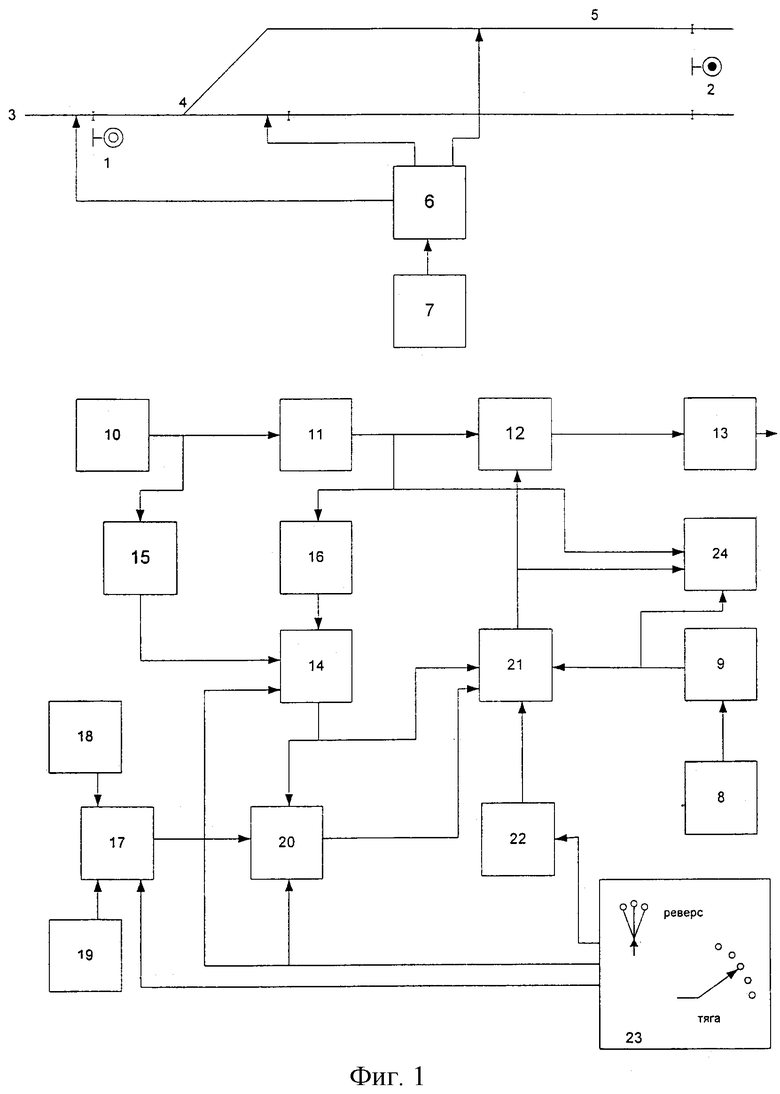
Устройство автоматического управления торможением маневрового локомотива, содержащее установленные на пути блоки кодирования, выходы которых подключены к соответствующим рельсовым цепям, а входы блоков кодирования соединены с выходом блока электрической централизации, и установленные на локомотиве блок автоматической локомотивной сигнализации, входом подключенный к локомотивным катушкам, а выходом к блоку индикации, датчик пути и скорости, соединенный через скоростемер с блоком индикации и первым входом блока сравнения, выход которого подключен к блоку управления тормозами и тягой, контроллер управления тяговыми двигателями, отличающееся тем, что оно снабжено установленными на локомотиве приемником спутниковой навигационной системы и электронной картой, блоком вычисления программной скорости, блоком измерения ускорения, блоком определения остановки, концевыми выключателями, блоком определения положения вагонов, блоком определения длины вагонов, блоком памяти, при этом выход датчика пути и скорости соединен с блоком определения остановки, выход которого соединен с первым входом блока памяти, второй вход которого подключен к выходу блока измерения ускорения, вход которого соединен с выходом скоростемера, третий вход блока памяти и первый вход блока определения длины вагонов соединены с контроллером управления тяговыми двигателями, который подключен к приемнику спутниковой навигационной системы и электронной карте и первому входу блока определения положения вагонов, второй и третий входы которого соединены с соответствующими концевыми выключателями, расположенными с каждой стороны локомотива в области автосцепки, выход блока определения положения вагонов соединен со вторым входом блока определения длины вагонов, выход которого соединен с первым входом блока вычисления программной скорости, второй вход которого и третий вход блока определения длины вагонов соединены с выходом блока памяти, третий и четвертый входы блока вычисления программной скорости соединены соответственно с выходом блока автоматической локомотивной сигнализации и выходом приемника спутниковой навигационной системы и электронной карты, выход блока вычисления программной скорости подключен ко второму входу блока сравнения и входу блока индикации.
| Кравцов Ю.А | |||
| Системы железнодорожной автоматики и телемеханики | |||
| М.: Транспорт, 1996, стр.140-147 | |||
| Устройство для автоматического управления торможением поезда | 1980 |
|
SU925709A1 |
| Устройство для автоматического управления торможением поезда | 1985 |
|
SU1255485A1 |
| Устройство для управления торможением маневрового состава | 1983 |
|
SU1131709A1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ ПОДВИЖНОГО СОСТАВА ПРИ СХОДЕ ВАГОНА С РЕЛЬСОВ | 1998 |
|
RU2137632C1 |
| US 5412572 A, 02.05.1995 | |||
| Упор к штампу последовательного действия "упор-5 | 1980 |
|
SU893323A1 |
| DE 19513244 A1, 10.10.1996. | |||

