Изобретение относится к области приборостроения и может быть использовано в измерительных системах, определяющих угловую ориентацию подвижных объектов.
Из предшествующего уровня техники известно, что в устройстве измерения магнитного курса подвижного объекта [патент RU 2262075, G01C 21/08, G17/38 опубл. 10.10.2005], как правило содержатся: блок трехкомпонентного магнитометра, блок трехкомпонентного акселерометра, блок трехкомпонентного датчика угловой скорости, которые жестко закреплены на подвижном объекте при этом входные оси датчиков параллельны связанным осям подвижного объекта, блок вычисления углов наклона и блок вычисления магнитного курса.
Недостатком этого решения является снижение точности вычисления магнитного курса подвижного объекта в области высоких и низких широт, вследствие изменения наклона вектора магнитного поля Земли, приводящего к уменьшению величины проекции горизонтальной составляющей этого вектора, измеряемой с помощью магнитометров.
Известен также электронный магнитный компас [патент RU №2331843, G01C 17/30, G01C 17/32, опубл. 20.08.2008], содержащий три магнитометра с ортогональными осями чувствительности, устройство преобразования сигналов магнитометров, устройство согласования сигналов акселерометров, аналого-цифровые преобразователи, цифровой модуль вычисления курса, устройство индикации курса и устройство питания, введены цифровой модуль расчета коэффициентов девиационных поправок и цифровой модуль контроля полной циркуляции, выход которого соединен с управляющим входом цифрового модуля расчета коэффициента девиационных поправок, информационные входы цифрового модуля расчета коэффициента девиационных поправок через аналого-цифровой преобразователь соединен с выходами магнитометров, а информационный выход цифрового модуля расчета коэффициента девиационных поправок соединен со входом цифрового модуля вычисления курса, выход которого соединен с устройством индикации курса и со входом цифрового модуля контроля полной циркуляции.
Недостатком этого решения является снижение точности вычисления магнитного курса подвижного объекта в области высоких и низких широт, вследствие изменения наклона вектора магнитного поля Земли, приводящего к уменьшению величины проекции горизонтальной составляющей этого вектора, измеряемой с помощью магнитометров.
Задачей изобретения является разработка электронного компаса, обеспечивающего высокую точность измерения курса подвижного объекта в области высоких и низких широт.
Технический результат - повышение точности измерения курса подвижного объекта в области высоких и низких широт.
Данная задача решается за счет того, что в устройство дополнительно введено не менее четырех рамок с измерительными узлами, каждый из которых включает трехкомпонентный магнитометр, трехкомпонентный акселерометр, трехкомпонентный датчик угловой скорости, при этом оси датчиков в измерительных узлах расположены параллельно друг другу и в исходном положении измерительных узлов параллельны строительным осям подвижного объекта, рамки выполнены с возможностью изменения углового положения для обеспечения смещения измерительного базиса магнитометров в диапазоне углов наклона вектора магнитного поля Земли от 90 градусов до минус 90 градусов и повышения их чувствительности, при этом измерительные узлы расположены таким образом, чтобы диапазон измерения курса был разделен на равные сектора, кроме того, нумерация измерительных узлов зависит от начального угла магнитного курса и угла наклона вектора магнитного поля Земли.
Предлагаемое техническое изобретение поясняется графическим материалом фиг. 1-6:
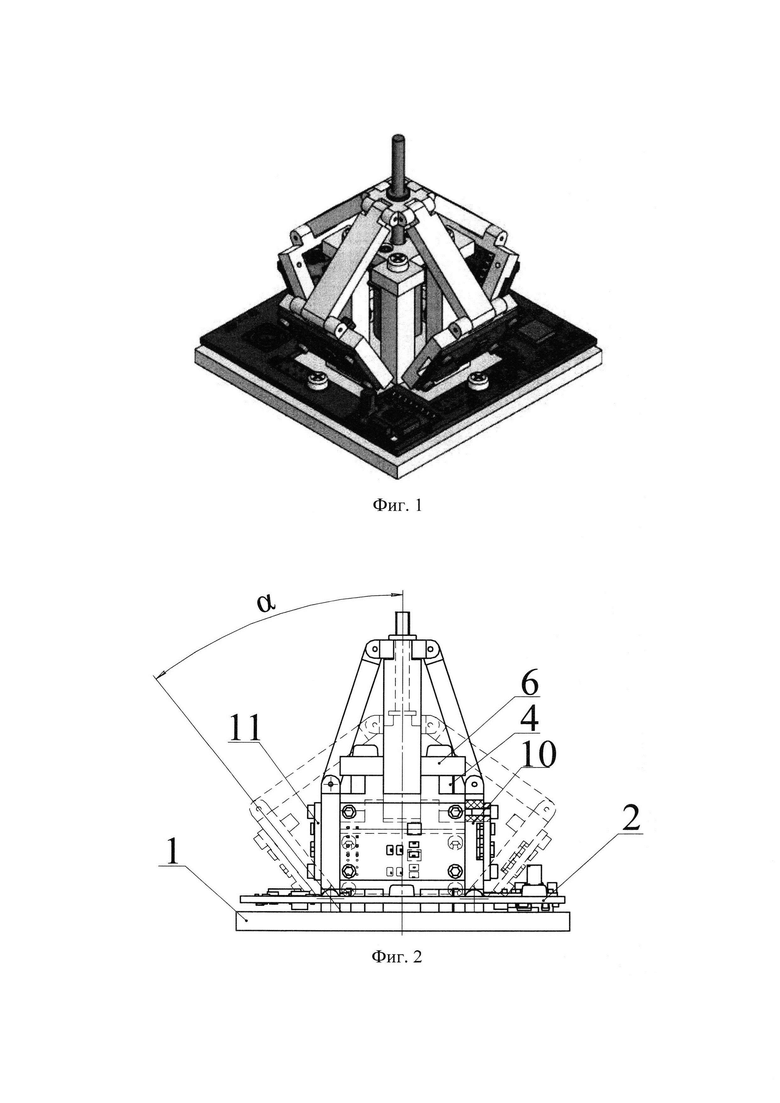
- на фиг. 1 изображен 3D вид описываемого устройства;
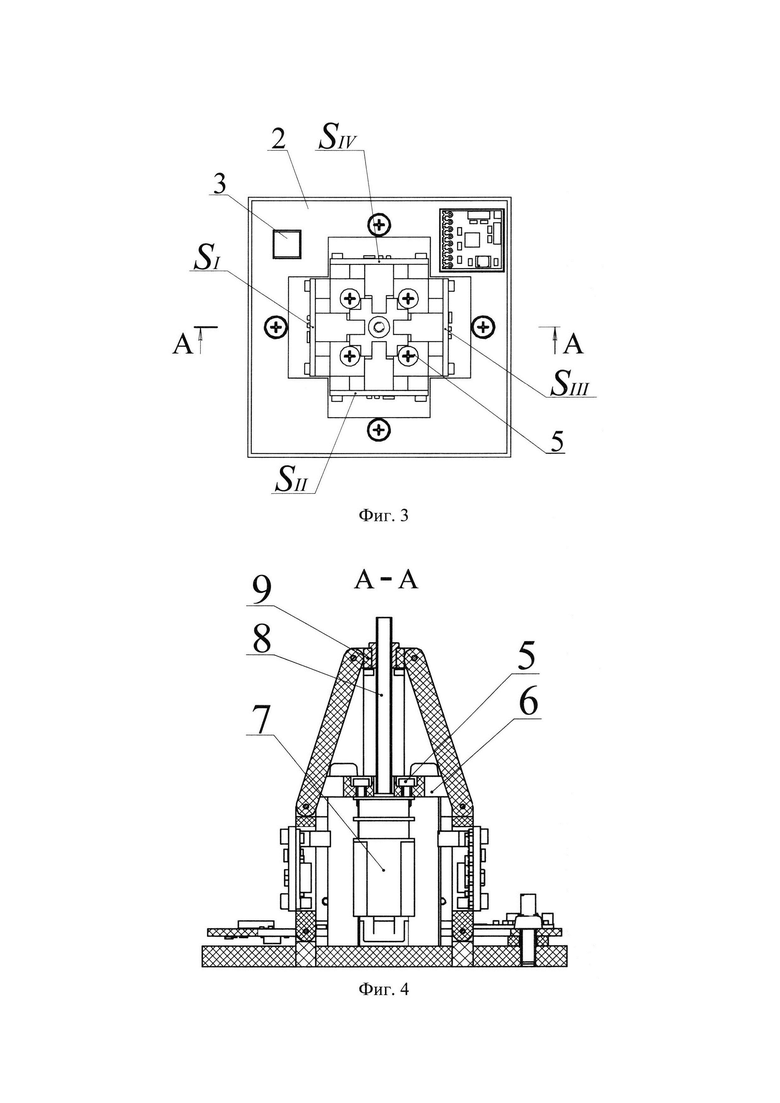
- на фиг. 2 изображен вид спереди описываемого устройства;
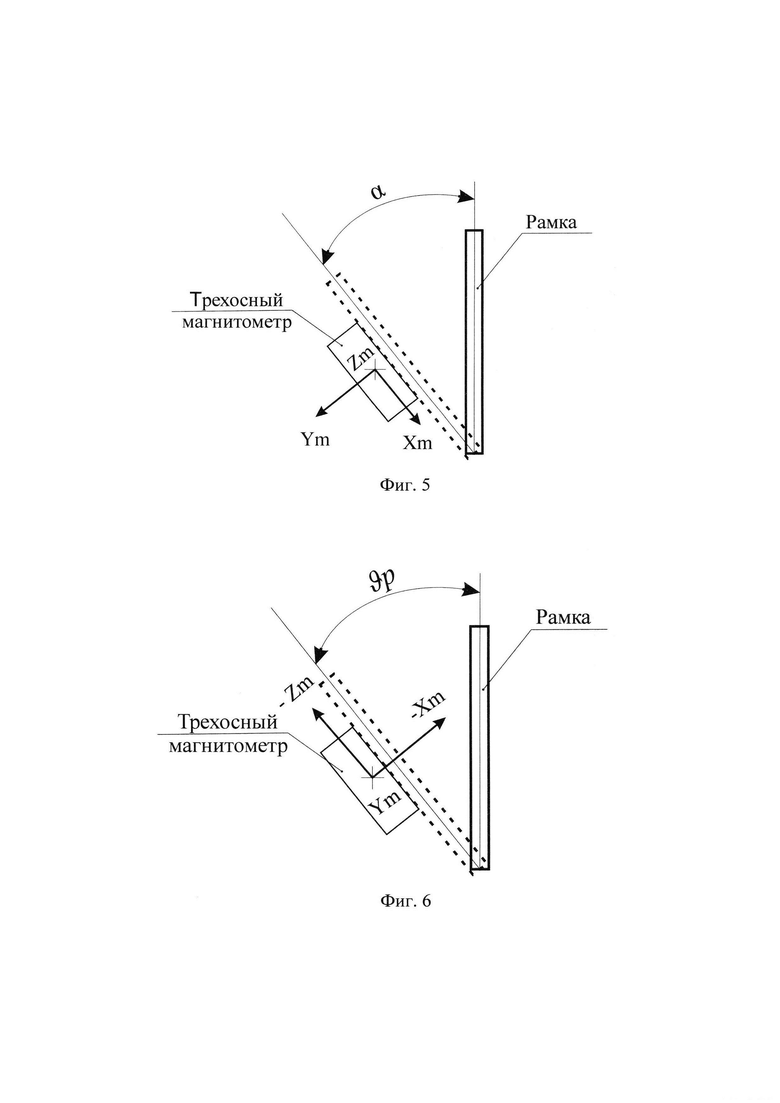
- на фиг. 3 изображен вид сверху описываемого устройства;
- на фиг. 4 изображен разрез А-А фиг. 2;
-на фиг. 5 изображено расположение осей чувствительности магнитометров в северном полушарии Земли;
-на фиг. 6 изображено расположение осей чувствительности магнитометров в южном полушарии Земли.
Конструкция электронного компаса состоит из основания 1, на котором установлена плата 2, содержащая трехкомпонентные магнитометры, трехкомпонентные акселерометры и трехкомпонентные датчики угловой скорости, входные оси которых параллельны связанным осям подвижного объекта, а также вычислитель 3. На основании 1 закреплены четыре стойки 4. На стойках 4 посредством четырех немагнитных винтов 5 зафиксирована площадка 6, имеющая сквозное отверстие в центре. На площадке 6 закреплен мотор-редуктор 7. На резьбовой оси 8 мотор-редуктора 7 расположена каретка 9, перемещающаяся вдоль резьбовой оси 8 при вращении последней. Направление перемещения каретки 9 определяется направлением вращения резьбовой оси 8. При движении каретка взаимодействует с промежуточными элементами, которые отклоняют четыре рамки 10. Угол отклонения рамок 10 однозначно определяется перемещением каретки 8. Таким образом, линейное перемещение каретки приводит к угловому перемещению рамок 10. В исходном состоянии рамки 10 выставлены под углом 90 градусов относительно платы 2 и основания 1. На каждой рамке установлены измерительные узлы 11, содержащие трехкомпонентные магнитометры, трехкомпонентные акселерометры и трехкомпонентные датчики угловой скорости, являющиеся источниками информации о напряженности магнитного поля Земли, линейном ускорении и угловой скорости подвижного объекта, соответственно. Оси датчиков расположены параллельно друг другу и параллельны строительным осям электронного компаса. В исходном состоянии измерительные узлы 11 имеют нумерацию SI-SIV, при этом нумерация осуществляется от вычислителя 3 против часовой стрелки как показано на фиг. 3. Электрический контакт между платой 2 и измерительными узлами 11 обеспечивается посредством пайки гибких проводников (не показаны). Длина проводников выбирается таковой, чтобы обеспечить возможность углового перемещения измерительных узлов на угол а в диапазоне от 0 градусов до 45 градусов относительно исходного положения.
Работает электронный компас следующим образом. В блок вычислителя 3 поступает информация о магнитном склонении (D) и наклонении (I) для текущей точки местности. По информации о текущем магнитном наклонении (I) вычислителем 3 осуществляется:
1. определение по величине и знаку магнитного наклонения (I) угла раскрытия рамок 10 с установленными на них измерительными узлами 11;
2. назначение входных осей измерительных узлов в зависимости от текущего полушария Земли;
3. назначение порядка нумерации I-IV измерительных узлов 11 при вычислениях;
4. назначение порядка использования сигнала с измерительных узлов 11 в вычислителе 3.
Пункты 2 и 3 обусловлены конструктивными ограничениями угла наклона рамок 10 не более 45 градусов, поэтому для обеспечения углов смещения измерительного базиса от минус 90 градусов до плюс 90 градусов используются физический поворот измерительного базиса путем отклонения рамки и алгоритмическая смена наименований осей чувствительности.
Угол раскрытия рамок 10 в зависимости от полушария Земли (северное или южное) определяется по выражению:
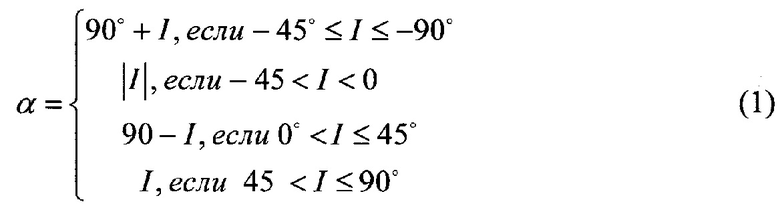
где I- магнитное наклонение в текущей точки местности;
α - угол раскрытия рамок 10.
Например, в случае нахождения подвижного объекта в точке местности, для которой магнитное наклонение I=-70° угол раскрытия рамок 10 будет равен α=20°. Угол раскрытия рамок 10 с установленными на них измерительными узлами 11 обеспечивается мотор-редуктором 7 при вращении резьбовой оси за счет перемещения каретки 9 при взаимодействии через промежуточные элементы.
Назначение входных осей измерительных узлов в зависимости от полушария Земли и магнитного наклонения осуществляется алгоритмически вычислителем 3 в соответствии с фиг. 5 и фиг. 6. Оси магнитометров, расположенных на измерительных узлах 11, в случае работы электронного компаса в северном полушарии для углов магнитного наклонения от минус 90 градусов до минус 45 градусов и в южном полушарии в диапазоне углов магнитного наклонения от плюс 45 градусов до плюс 90 градусов, должны быть назначены следующим образом (фиг. 5):
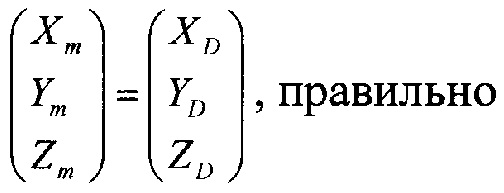
где Xm, Ym, Zm - наименования осей используемые при вычислении магнитного курса;
XD, YD, ZD - измерительные оси магнитометров (фактические оси датчика).
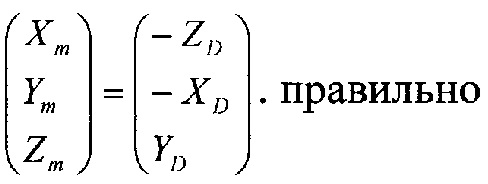
Оси магнитометров, расположенных на измерительных узлах 11, в случае работы электронного компаса в северном полушарии в диапазоне углов магнитного наклонения от минус 45 градусов до 0 градусов и в южном полушарии для углов магнитного наклонения более нуля градусов и менее плюс 45 градусов, должны быть переназначены алгоритмически в вычислителе 3 (фиг. 6):
По сигналам, получаемым с платы 2 о проекциях вектора линейного ускорения, измеряемых акселерометрами, и проекциях угловой скорости, измеряемых датчиком угловой скорости, вычисляются углы тангажа ϑn и крена γn основания 1 (определяемые текущим угловым положением подвижного объекта).
Далее вычислитель 3 осуществляет вращение оси 8 мотор-редуктора 7 на число оборотов, обеспечивающее перемещение каретки и отклонение связанных с ней рамок на угол α. Контроль угла отклонения рамки 10 осуществляется на основании данных об углах тангажа θn и крена γn и аналогичных величин, полученных на основании показаний акселерометров и датчиков угловой скорости, установленных на измерительных узлах 11.
На следующем этапе полученные сигналы о проекции вектора магнитного поля Земли со всех трехосных магнитометров поступают в вычислитель 3, где осуществляется их алгоритмическое горизонтирование:
- для магнитометров, установленных на плате

где  - горизонтированные проекции магнитного поля Земли;
- горизонтированные проекции магнитного поля Земли;
 - проекции магнитного поля Земли, полученные с магнитометров, установленных на плате 2;
- проекции магнитного поля Земли, полученные с магнитометров, установленных на плате 2;
ϑn - текущее угловое положения подвижного объекта по тангажу;
γn - текущее угловое положения подвижного объекта по крену.
- для магнитометров установленных на измерительных узлах 11:

где  - горизонтированные проекции магнитного поля Земли,
- горизонтированные проекции магнитного поля Земли,
полученные с магнитометров, установленных в измерительных узлах;
 - проекции магнитного поля Земли, полученные с магнитометров, установленных на измерительных узлах 11.
- проекции магнитного поля Земли, полученные с магнитометров, установленных на измерительных узлах 11.
Далее в вычислителе 3 реализуется режим «Калибровка» всех магнитометров, по известным алгоритмам [Богданов, М.Б. Калибровка аддитивной погрешности и неперпендикулярности измерительных осей двухосевого магнитометра / М. Б. Богданов, А.О. Макалов // Известия Института инженерной физики. - 2018. - №3(49). - С. 27-30]. После окончания режима «Калибровка» - вычислителем 3 определяется начальный угол магнитного курса на основании сигналов, полученных с трех магнитометров, трех акселерометров и трех датчиков угловой скорости, расположенных на плате 2 по выражению:

где - начальный угол магнитного курса.
- начальный угол магнитного курса.
Далее уточняется порядок нумерации измерительных узлов 11 по следующему выражению:

где Sj - порядок нумерации измерительных узлов (/' - порядковый номер в соответствии с фиг. 5).
В зависимости от начального угла магнитного курса определяется начальный измерительный узел 11, показания магнитометров которого будут использоваться вычислителем 3 при вычислении текущего магнитного курса:
где SN - начальный измерительный узел;
 - измерительные узлы.
- измерительные узлы.
Вычисление угла магнитного курса с данного момента осуществляется на основании выходных сигналов магнитометров, установленных на измерительных узлах 11, и определяется по следующему выражению:

где - магнитный курс, вычисленный с помощью соответствующего измерительного узла.
- магнитный курс, вычисленный с помощью соответствующего измерительного узла.
Далее в процессе работы (при изменении текущего угла магнитного курса), вычислитель 3 осуществляет переключение между измерительными узлами 11 на основании информации о текущем вычисленном угле курса:
где St - текущий измерительный узел, информация с магнитометрического датчика которого обрабатывается вычислителем 3;
 - текущий измеряемый магнитный курс подвижного объекта.
- текущий измеряемый магнитный курс подвижного объекта.
Таким образом, измерительные узлы 11 разбивают диапазон измерения магнитного курса на четыре сектора равные 90 градусов.
То есть, при начальном угле магнитного курса 0 градусов работает измерительный узел SI, расположенный на рамке I. Измерительный узел SI будет использоваться в качестве источника информации до тех пор, пока текущий угол курса находится в диапазоне от 315° градусов до 360° и от 0° до 45° градусов. Затем, при увеличении курса (движение по часовой стрелке) источником информации является измерительный узел SII, при этом к полученному значению угла магнитного курса вычислитель добавляет поправку 90 градусов. Измерительный узел SII опрашивается вычислителем 3 до тех пор, пока угол курса не уменьшается до 45 градусов и менее (тогда опрашивается измерительный узел SI и поправка в 90 градусов не применяется) либо, пока угол курса не становится больше 135 градусов. В этом случае источником информации становится измерительный узел SIII, а к рассчитанному углу курса вычислитель добавляет поправку 180 градусов. Опрос измерительного узла SIII, осуществляется до тех пор, пока угол курса не уменьшается до 135 градусов и менее (тогда в работу включается измерительный узел SII и поправка в 180 градусов не применяется, а используется поправка в 90 градусов) либо, пока угол курса не становится больше 225 градусов. В этом случае источником информации становиться измерительный узел SIV, а к полученному углу курса добавляется поправка в 270 градусов. Измерительный узел SIV является источником информации до тех пор, пока угол курса не уменьшается до 225 градусов и менее (тогда работает измерительный узел SIII и поправка в 270 градусов не применяется, а используется поправка в 180 градусов) либо, пока угол курса не становится больше 315 градусов. В этом случае источником информации становится измерительный узел SI, а поправка в 270 градусов - не применяется. Далее аналогично.
Определение величины поправки к магнитному курсу в зависимости от порядкового номера текущего измерительного узла (работающего в секторе±45°) определяется выражением:

где ψm - вычисленный угол магнитного курса подвижного объекта;
n - порядковый номер измерительного узла, который в момент вычисления является источником информации о напряженности магнитного поля.
Назначение порядкового номера измерительного узла в выражении (8) осуществляется следующим образом:
Вычисление текущего курса подвижного объекта корректируется с учетом полученных значений магнитного склонения в соответствии с выражением:
где ψ - текущий курс подвижного объекта, вычисленный электронным компасом;
D - магнитное склонение для текущей точки местности.
Таким образом, заявленное устройство электронного компаса для подвижного объекта позволяет повысить точность измерения курса подвижного объекта в области высоких и низких широт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| ЭЛЕКТРОННЫЙ МАГНИТНЫЙ КОМПАС | 2006 |
|
RU2331843C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 1998 |
|
RU2130588C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| Способ измерения магнитного курса подвижного объекта | 2024 |
|
RU2831224C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2262075C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2005 |
|
RU2279039C1 |
Изобретение относится к области приборостроения и применяется в системах, определяющих местоположение подвижных объектов (ПО). Сущность заявленного электронного компаса состоит в том, что в устройство дополнительно введено не менее четырех рамок с измерительными узлами, каждый из которых включает трехкомпонентный магнитометр, трехкомпонентный акселерометр, трехкомпонентный датчик угловой скорости, при этом оси датчиков в измерительных узлах расположены параллельно друг другу и в исходном положении измерительных узлов параллельны строительным осям ПО. Рамки выполнены с возможностью изменения углового положения для обеспечения смещения измерительного базиса магнитометров в диапазоне углов наклона вектора магнитного поля Земли от 90 градусов до минус 90 градусов и повышения их чувствительности. Измерительные узлы расположены таким образом, чтобы диапазон измерения курса был разделен на равные сектора; кроме того, нумерация измерительных узлов зависит от начального угла магнитного курса и угла наклона вектора магнитного поля Земли. Технический результат заключается в повышении точности измерения курса ПО. 6 ил.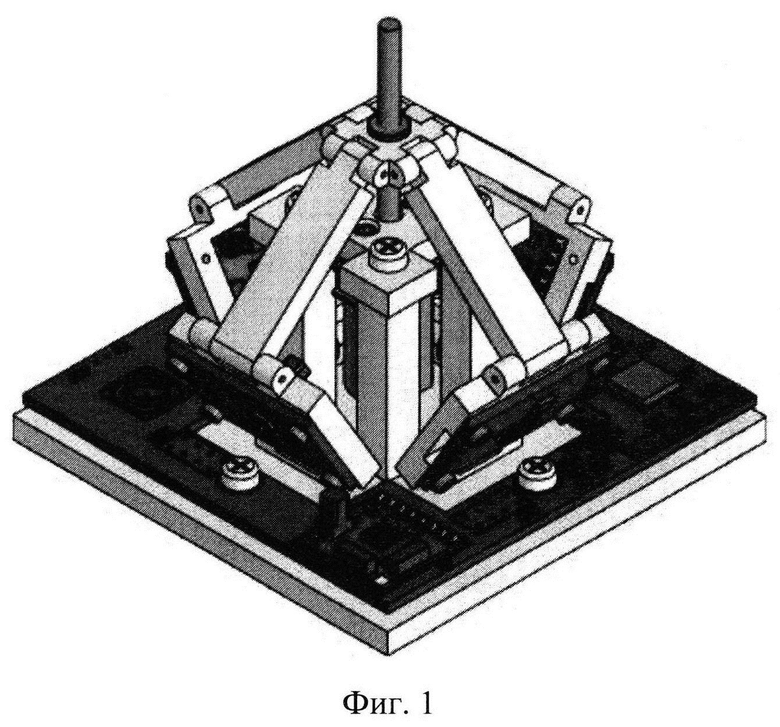
Электронный компас для подвижного объекта, содержащий блок трехкомпонентного магнитометра, блок трехкомпонентного акселерометра, блок трехкомпонентного датчика угловой скорости, которые жестко закреплены на подвижном объекте, входные оси которых параллельны связанным осям подвижного объекта, отличающийся тем, что в устройство дополнительно введено не менее четырех рамок с измерительными узлами, каждый из которых включает трехкомпонентный магнитометр, трехкомпонентный акселерометр, трехкомпонентный датчик угловой скорости, при этом оси датчиков в измерительных узлах расположены параллельно друг другу и в исходном положении измерительных узлов параллельны строительным осям подвижного объекта, рамки выполнены с возможностью изменения углового положения для обеспечения смещения измерительного базиса магнитометров в диапазоне углов наклона вектора магнитного поля Земли от 90 градусов до минус 90 градусов и повышения их чувствительности, при этом измерительные узлы расположены таким образом, чтобы диапазон измерения курса был разделен на равные сектора, кроме того, нумерация измерительных узлов зависит от начального угла магнитного курса и угла наклона вектора магнитного поля Земли.
| ЭЛЕКТРОННЫЙ МАГНИТНЫЙ КОМПАС | 2006 |
|
RU2331843C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2262075C1 |
| ЦИФРОВАЯ МАГНИТНАЯ КОМПАСНАЯ СИСТЕМА С КОРРЕКЦИЕЙ | 2020 |
|
RU2769922C2 |
| US 10215564 B2, 26.02.2019. | |||

