Изобретение относится к области калибровки и применения электронного магнитного компаса (МК) для определения азимута заданного направления при решении задач геодезии, навигации, топографии, прицеливания и наведения.
Известны способы калибровки МК, заключающиеся в перемещении (вращении) компаса по определенной траектории [1, 2], либо в одновременном использовании нескольких магнитометрических образцов [3, 4] с последующим расчетом корректирующих поправок. Общим недостатком аналогов [1-4] является высокая сложность схем калибровки и вычислительных процедур обработки результатов.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ калибровки электронного МК [5], заключающийся в установке компаса на плоскости так, чтобы приемники (датчики) магнитного поля его ортогональных осей X и Y лежали в этой плоскости, вращении компаса вокруг оси Z, перпендикулярной этой плоскости, и фиксации его в четырех, i=1÷4, ортогональных положениях. В каждом положении МК измеряют сигналы приемников магнитного поля Mxi и Myi по осям X и Y, с использованием которых оценивают статические ошибки mx и my по каждой из осей путем определения средних значений:

Далее отношение чувствительностей приемников компаса по осям X и Y, определяемое как отношение «модулей вектора магнитного поля  » (по тексту формулы и описания изобретения-прототипа), полученных с использованием всех измерений по осям X и Y, вычисляют по формуле:
» (по тексту формулы и описания изобретения-прототипа), полученных с использованием всех измерений по осям X и Y, вычисляют по формуле:

При практическом применении МК («при использовании» по терминологии прототипа) ось X совмещают с направлением движения. Измеряют сигналы приемников магнитного поля Вх и Ву по осям X и Y и вычисляют направление на магнитный полюс в плоскости XY (т.е. угол азимута α направления движения) по формуле:

Способ-прототип имеет следующие основные недостатки:
1. В соответствии с [5] калибровка и последующее практическое применение выполняются в предположении точного горизонтирования МК, следствием чего является измерение приемниками осей X и Y проекций только горизонтальной составляющей  вектора
вектора  . Тем самым из рассмотрения и учета исключаются не менее информативная в реальных условиях ненулевых углов тангажа β (ось X) и крена γ (ось Y) вертикальная составляющая
. Тем самым из рассмотрения и учета исключаются не менее информативная в реальных условиях ненулевых углов тангажа β (ось X) и крена γ (ось Y) вертикальная составляющая  магнитного поля и соответствующее измерение по оси Z (фиг. 1). В результате существенно ограничиваются функциональные возможности способа [5].
магнитного поля и соответствующее измерение по оси Z (фиг. 1). В результате существенно ограничиваются функциональные возможности способа [5].
2. Следствием сказанного является второй недостаток - низкая точность определения азимута α по «идеальной» упрощенной формуле (3) при ненулевых углах β и γ (более подробно см. далее).
В качестве недостатков также можно указать на некорректность использования в формуле (2) модуля полного вектора магнитного поля  , а не его, как отмечено выше, горизонтальной составляющей
, а не его, как отмечено выше, горизонтальной составляющей  , а также на ограниченность рассмотрения только плоской задачи направленного движения, т.е. применения МК на подвижном основании. Приведенные и последующие материалы в полной мере справедливы для задач МК на неподвижном основании (например, в составе стационарных угломерных платформ).
, а также на ограниченность рассмотрения только плоской задачи направленного движения, т.е. применения МК на подвижном основании. Приведенные и последующие материалы в полной мере справедливы для задач МК на неподвижном основании (например, в составе стационарных угломерных платформ).
Цель заявляемого изобретения состоит в расширении функциональных возможностей и повышении точности электронного МК при калибровке и определении угла азимута.
Для достижения поставленной цели в способе калибровки и применения трехосевого электронного МК, заключающемся в том, что компас устанавливают на плоскости так, чтобы приемники магнитного поля его ортогональных осей X и Y лежали в этой плоскости, вращают компас вокруг оси Z, перпендикулярной этой плоскости, и фиксируют его в четырех, i=1÷4, ортогональных положениях. В каждом положении компаса измеряют сигналы приемников магнитного поля Mxi и Myi по осям X и Y, с использованием которых оценивают статические ошибки компаса mx и my по обеим осям путем определения средних значений сигналов Mxi и Myi по всем положениям компаса, используя, так же как в [5], соотношения (1). Определяют отношение kyx=ky/kx чувствительностей ky и kx приемников компаса по осям Y и X как отношение модулей вектора горизонтальной составляющей магнитного поля  , полученных с использованием измерений по осям Y и X:
, полученных с использованием измерений по осям Y и X:

Затем устанавливают компас так, чтобы выбрать в качестве оси вращения ось Y и, действуя аналогично, i=5÷8, определяют статическую ошибку компаса mz по оси Z:

и отношение kzx=kz/kv чувствительностей kz и kx приемников компаса по осям Z и X:

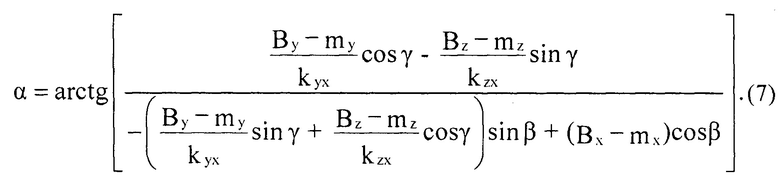
При применении компаса дополнительно используют измеритель углов тангажа β и крена γ объекта-носителя компаса, связанные оси которого совпадают с осями X, Y и Z, совмещают ось X с заданным направлением, измеряют сигналы приемников магнитного поля Вх, Ву и Bz по осям X, Y и Z и вычисляют магнитный азимут α заданного направления:
Существенные отличительные признаки заявляемого изобретения по сравнению с прототипом заключаются в следующем:
1. Установка осей компаса X и Z в горизонтальной плоскости, аналогичная установке осей X и Y в прототипе, и его вращение вокруг оси Y позволяют в соответствии с соотношениями (5), (6) определить статическую ошибку mz и отношение чувствительностей kzx для оси Z компаса. Совместно с величинами mx, my и kyx, вычисленными по соотношениям (1) и (4), этим формируется полный набор калибровочных параметров, необходимый для коррекции измерений трехосевого электромагнитного МК при практическом применении. Прототип ограничивается определением параметров mx, my и kyx для двух осей X и Y компаса.
2. Использование измерителя углов тангажа β и крена γ объекта-носителя МК, связанные оси которого совпадают с осями X, Y и Z, обеспечивает определение угловой пространственной ориентации объекта (компаса), учет которой необходим для корректного высокоточного применения компаса в реальных условиях неизбежных в силу естественных причин (например, непроизвольных колебаний рук оператора, применяющего компас) отклонений от плоскости местного горизонта. В прототипе подобный измеритель не предусмотрен, а углы β и γ не учитываются. Это приводит к грубым ошибкам азимутальных определений.
3. Вычисление азимута α заданного направления по трем сигналам Bx, Ву и Bz, измеренным приемниками (датчиками) магнитного поля компаса, выполняют по обобщенной формуле (7). В прототипе для этого используется упрощенная формула (3). Путем подстановки в (7) нулевых значений углов тангажа и крена (β=γ=0) легко показать, что (3) является частным случаем (7), соответствующим «идеальному» горизонтированию МК.
Технический результат состоит в расширении функциональных возможностей и повышении точности трехосевого электронного МК при калибровке и практическом применении.
Заявляемый способ иллюстрируют следующие графические материалы:
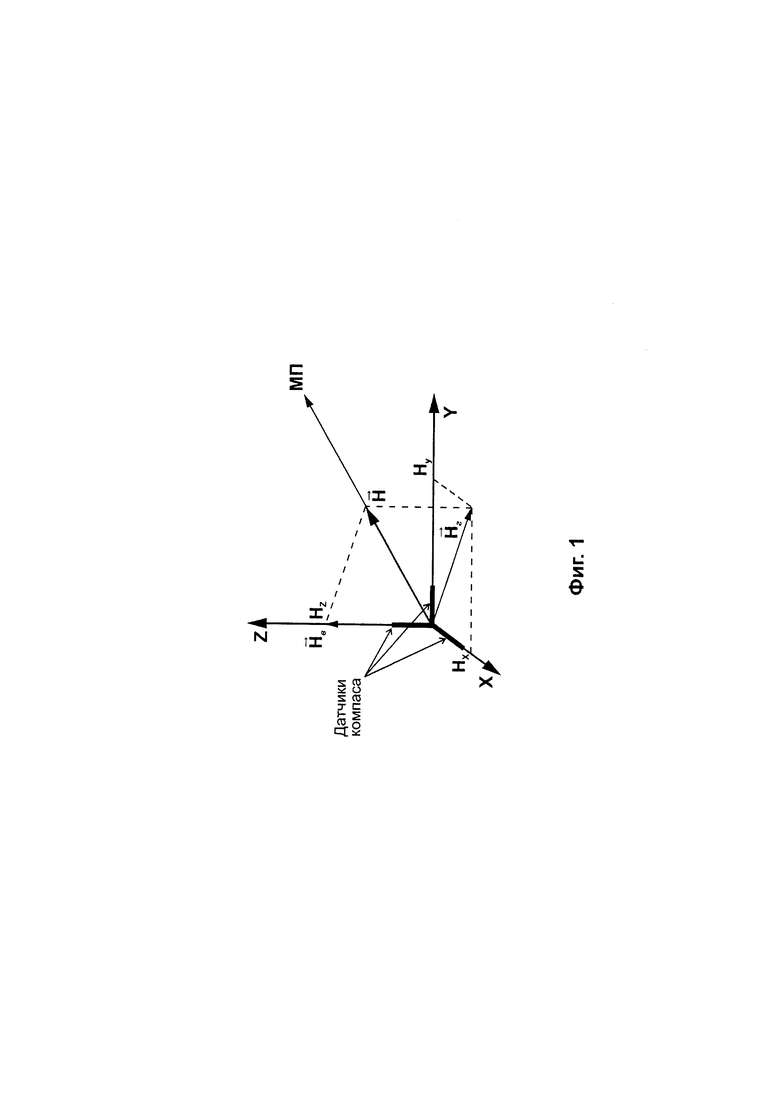
Фиг. 1. Проекции вектора магнитного поля  на оси X, Y и Z МК.
на оси X, Y и Z МК.
Примечание - Рисунок соответствует случаю установки осей X, Y в горизонтальной плоскости. МП - магнитный полюс.
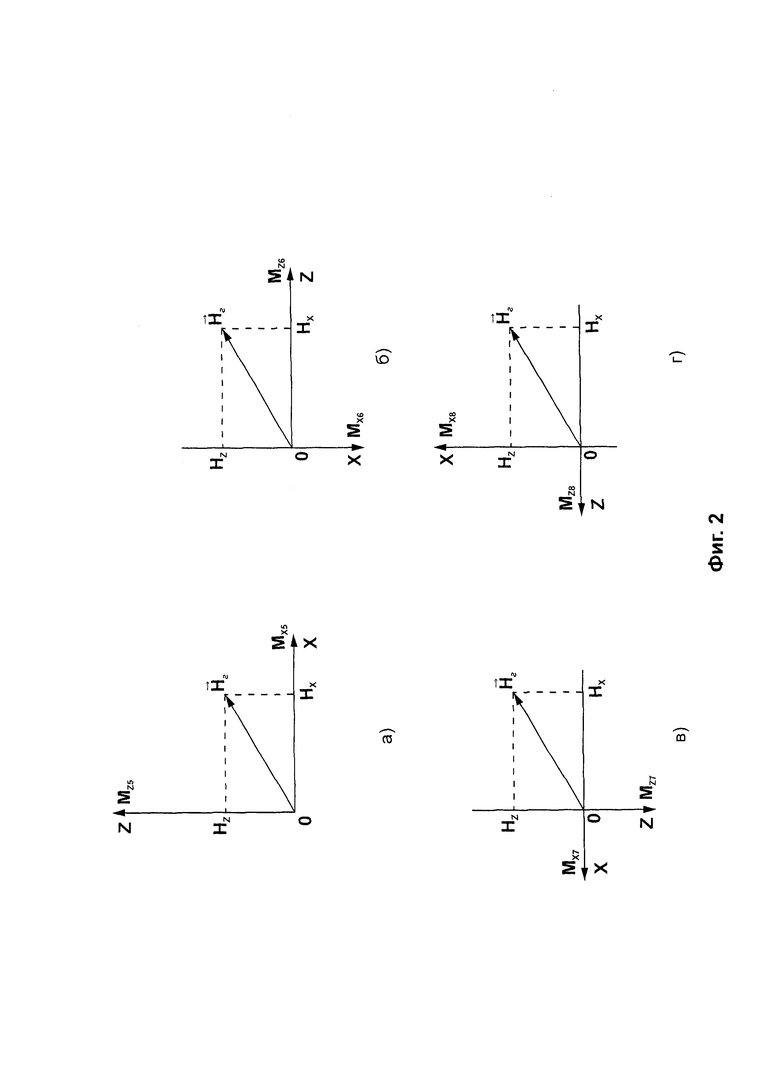
Фиг. 2. Схема калибровки МК по осям X и Z.
Рассмотрим сущность и возможность реализации заявляемого способа.
Ориентация осей X, Y и Z МК (связанных осей объекта-носителя компаса) относительно направлений на магнитные восток Ем и север Nм и местной вертикали h задается матрицей направляющих косинусов:

где α, β и γ - углы азимута, тангажа и крена.
Умножая матрицу (8) справа на вектор-столбец напряженности магнитного поля  , где Нг, Нв - модули горизонтальной и вертикальной составляющих, получим выражения для измеренных проекций этих составляющих на оси X, Y и Z:
, где Нг, Нв - модули горизонтальной и вертикальной составляющих, получим выражения для измеренных проекций этих составляющих на оси X, Y и Z:

Разрешая систему уравнений (9) при измеренных значениях Вх, Ву и Bz и известных углах β, γ относительно угла азимута α, получаем базовое выражение для этого угла:

Полученное выражение описывает работу «идеального» электронного МК без статических ошибок и при одинаковой чувствительности по различным осям приемников магнитного поля. Вводя сформированные при калибровке поправки mx, my, mz, компенсирующие статические ошибки реальных приемников, и отношения kyx, kzx их чувствительностей, нормирующие измерения по различным осям, от (10) приходим к обобщенной формуле (7).
Вышеупомянутая калибровка по осям X и Y, результатом которой являются параметры mx, my и kyx, проводится по изложенной в описании прототипа (с. 7-9, фиг. 2) схеме с учетом более корректных обозначений  и
и  . При этом рассматривается частный случай «определения азимута движения при перемещении по поверхности Земли», а также считается «что в рассматриваемом случае вертикальная проекция Hz не имеет существенного значения» (см. описание прототипа). Как результат, калибровка по оси Z в прототипе не требуется.
. При этом рассматривается частный случай «определения азимута движения при перемещении по поверхности Земли», а также считается «что в рассматриваемом случае вертикальная проекция Hz не имеет существенного значения» (см. описание прототипа). Как результат, калибровка по оси Z в прототипе не требуется.
Рассмотрим необходимую в общем случае определения азимута при произвольной угловой ориентации компаса аналогичную схему калибровки приемников применительно к осям X и Z (фиг. 2 данного описания).
Оси компаса X, Z устанавливают на горизонтальную плоскость и измеряют сигналы приемников магнитного поля Mx5 и Mz5 в первом положении, фиг. 2, а):
Mx5=kxHx+mx,
Mz5=kzHz+mz.
Поворачивают компас по часовой стрелке на 90° и аналогичным образом измеряют сигналы, фиг. 2, б):
Mx6=-kxHz+mx,
Mz6=kzHx+mz.
Следующий поворот на 90°, фиг. 2, в), даст сигналы:
Mx7=-kxHx+mx,
Mz7=-kzHz+mz.
Четвертый последний поворот на 90°, фиг. 2, г), позволит получить:
Mx8=kxHz+mx,
Mz8=-kzHx+mz.
Здесь учтено, что первые четыре измерения, i=1÷4, выполнены при калибровке осей X и Y.
Сложив одноименные измерения Mxi, Mzi, i=5÷8, и разделив на 4, определяют статические ошибки компаса mx, mz:

Заметим, что повторное определение статической ошибки mx по соотношению (11) позволяет получить более точную оценку этого параметра усреднением его значений из (1) и (11).
Далее по измерениям Mxi, Mzi рассчитывают разности:
Mx5-Mx7=2kxHx, Mx6-Mx8=-2kxHz,
Mz5-Mz7=2kzHz, Mz6-Mz8=2kzHx,
откуда (см. фиг. 1):


где  ,
,  - модули вектора горизонтальной составляющей
- модули вектора горизонтальной составляющей  магнитного поля, полученные с использованием измерений по осям X и Z.
магнитного поля, полученные с использованием измерений по осям X и Z.
В результате получают формулу (6) для отношения kzx чувствительностей приемников компаса по осям Z и X.
В качестве измерителя углов тангажа β и крена γ объекта-носителя компаса используют трехосевой акселерометрический инклинометр, по данным которого определяют указанные углы:
где ax, ay, az - измеренные приемниками чувствительных (связанных) осей инклинометра проекции вектора ускорения силы тяжести  ; g - модуль вектора
; g - модуль вектора  .
.
Реализация заявляемого способа не вызывает сложности. Сборка трехосевых соосных электронного магнитного компаса и акселерометрического инклинометра может быть выполнена по МЭМС-технологии в виде бесплатформенной инерциальной навигационной системы (БИНС) угловой ориентации. Помимо указанных компонентов в типовую БИНС входят трехосевой датчик угловой скорости (ДУС) и датчик температуры. ДУС является дублирующим средством инклинометрии при угловых определениях высокоподвижных (динамичных) объектов, а датчик температуры необходим для введения поправок по градуировочным зависимостям калибровочных параметров от температуры, закладываемым в измерительные датчики при заводском исполнении. На практике такая БИНС обычно строится в виде типового инерциального измерительного устройства (Inertial measurement unit, IMU), например, как комбинированные датчики STIM 300 компании Sensonor или MPU 9255 компании Inven Sense. Для расчетов по приведенным соотношениям может использоваться внешний или встроенный в БИНС вычислитель, например, такой как малогабаритная СнК (система-на-кристалле) SmartFusion2, включающая энергонезависимую матрицу ПЛИС, выполненную по Flash-технологии, и процессорную подсистему на базе процессора АРМ Cortex М3.
Таким образом, заявляемый способ может быть реализован и обеспечивает расширение функциональных возможностей и повышение точности трехосевого электронного МК при калибровке и определении азимута заданного направления.
Источники информации
1. Патент WO 2013188776.
2. Патент RU 2503923.
3. Патент RU 2229727.
4. Патент RU 2497139.
5. Патент RU 2623192.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки электронного магнитного компаса | 2016 |
|
RU2623192C1 |
| СПОСОБ КАЛИБРОВКИ ЭЛЕКТРОННОГО МАГНИТНОГО КОМПАСА | 2014 |
|
RU2572109C1 |
| СПОСОБ ПОЛЕВОЙ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА | 2018 |
|
RU2674535C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| СПОСОБ ОБНОВЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ, ОСНОВАННЫЙ НА ДЕВЯТИОСЕВОМ ДАТЧИКЕ НА ОСНОВЕ МЭМС | 2016 |
|
RU2662460C1 |
| Способ измерения уклонений отвесной линии и устройство для его реализации | 2020 |
|
RU2750999C1 |
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1985 |
|
SU1840171A1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2014 |
|
RU2561229C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
Изобретение относится к способам калибровки электронного магнитного компаса (МК) для определения азимута заданного направления при решении задач геодезии, навигации, топографии и др. Калибровка содержит два этапа, на первом из которых приемники магнитного поля осей X и Y устанавливают на плоскость и вращают МК вокруг оси Z, измеряя в четырех ортогональных положениях сигналы Mxi, Myi. По измеренным сигналам определяют статические ошибки mx, my и отношение kyx = ky / kx чувствительностей ky, kx приемников МК по осям X, Y. На втором этапе на плоскость устанавливают приемники осей X, Z, вращают МК вокруг оси Y и, действуя аналогично, по сигналам Mxi, Mzi определяют статическую ошибку mz и отношение чувствительностей kzx = kz / kx по оси Z. Технический результат - расширение функциональных возможностей и повышение точности МК при калибровке. 2 ил.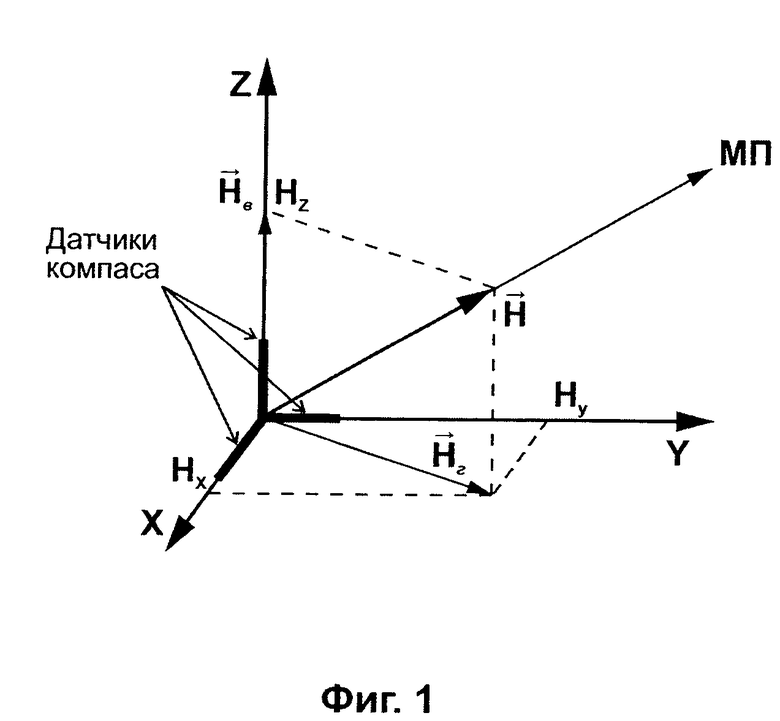
Способ калибровки трехосевого электронного магнитного компаса, заключающийся в том, что компас устанавливают на плоскость так, чтобы приемники магнитного поля его ортогональных осей X и Y лежали в этой плоскости, вращают компас вокруг оси Z, перпендикулярной этой плоскости, и фиксируют его в четырех, i=1÷4, ортогональных положениях, в каждом положении компаса измеряют сигналы приемников магнитного поля Mxi и Myi по осям X и Y, оценивают статические ошибки компаса mx и my по обеим осям путем определения средних значений сигналов Mxi и Myi по всем положениям компаса:
определяют отношение kyx = ky / kx чувствительностей ky и kx приемников компаса по осям Y и X как отношение модулей вектора горизонтальной составляющей  магнитного поля, полученных с использованием измерений по осям Y и X:
магнитного поля, полученных с использованием измерений по осям Y и X:
отличающийся тем, что затем устанавливают компас так, чтобы выбрать в качестве оси вращения ось Y и, действуя аналогично, i=5÷8, определяют статическую ошибку компаса mz по оси Z:
и отношение kzx = kz / kx чувствительностей kz и kx приемников компаса по осям Z и X:
| Способ калибровки электронного магнитного компаса | 2016 |
|
RU2623192C1 |
| СПОСОБ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА ПЕШЕХОДА | 2012 |
|
RU2503923C1 |
| СПОСОБ ЭКСПЛУАТАЦИОННОЙ КАЛИБРОВКИ ТРЕХОСЕВОГО ЭЛЕКТРОННОГО КОМПАСА С КОМПЕНСАЦИЕЙ СМЕЩЕНИЯ ОСЕЙ | 2020 |
|
RU2755400C1 |
| WO 2004076971 A2, 10.09.2004 | |||
| CN 108398124 B, 16.10.2020. | |||

