Oi 4 О5
1
Изобретение относится к технике экспериментального исследования океана, а точнее к области исследования океанических течений, и может быть использовано при исследовании распределения скоростей и направлений течения по глубине в режиме дрейфа или стоянки исследовательского судна на якоре.
Известен зондирующий комплекс профиля скоростей течения содержащий корпус из немагнитного материала., измеритель гидростатического давления, три ортогональных акустических измерителя скорости течения, измеритель угла азимута, кабель-тросовую линию связи с бортовой аппаратурой судна, измерители отклонения продольной оси корпуса от вертикали и угла отклонения кабельтроса от поперечной плоскости судна 1 .
Недостаток данной конструкции заключается в том, что качка судна вследствие непосредственной механической связи зондирующего .комплекса с бортом корабля через кабельтрос влияет на результаты измерения скорости, снижая точность ее определения. Кроме того, для определения мгновенного значения скорости течения требуется обработать три синхронно проведенных измерения от трех ортогональных акустических измерителей скорости, а это также увеличивает погрешность измерения.
Наиболее близким к предлагаемому по технической сущности является устройство для измерения и регистрации скорости и направления течений, содержащее винт и корпус из немагнитного материала, внутри которого расположены контрольно-измерительная аппаратура, включающая в себя приемник направления в виде феррозондов, измеритель скорости течения и измеритель гидростатического давления, выходы которых соединены с усилительными блоками, а выходы усилительных блоков - с блоками памяти 2 .
Недостатком известного устройства является низкая информативность при измерении профиля скоростей течения по глубина
Цель изобретения - повышение точности измерений профиля скоростей течения по глубине с борта исследо646052
вательского судна путем исключения влияния его качки.
Для достижения поставленной цели в устройстве для измерения и регистрации скорости и направления течений, содержащем винт и корпус из немагнитного материала, внутри которого расположены контрольно-измерительная аппаратура, включающая в
10 себя приемнлк направления в виде феррозондов, измеритель скорости течения и измеритель гидростатического давления, выходы которых соединены с усилительными блоками, а выходы усилительных блоков - с блоком памяти, лопасти профилированного винта жестко связаны с корпусом устройства, вьтолненным симметричным отно-. сит.,ельно оси винта и имеющим центральное отверстие, при этом датчик скорости установлен на конце лопасти винта.
На фиг. 1 схематически изображено устройство, вид сбоку; на
25 фиг. 2 - блок-схема устройства.
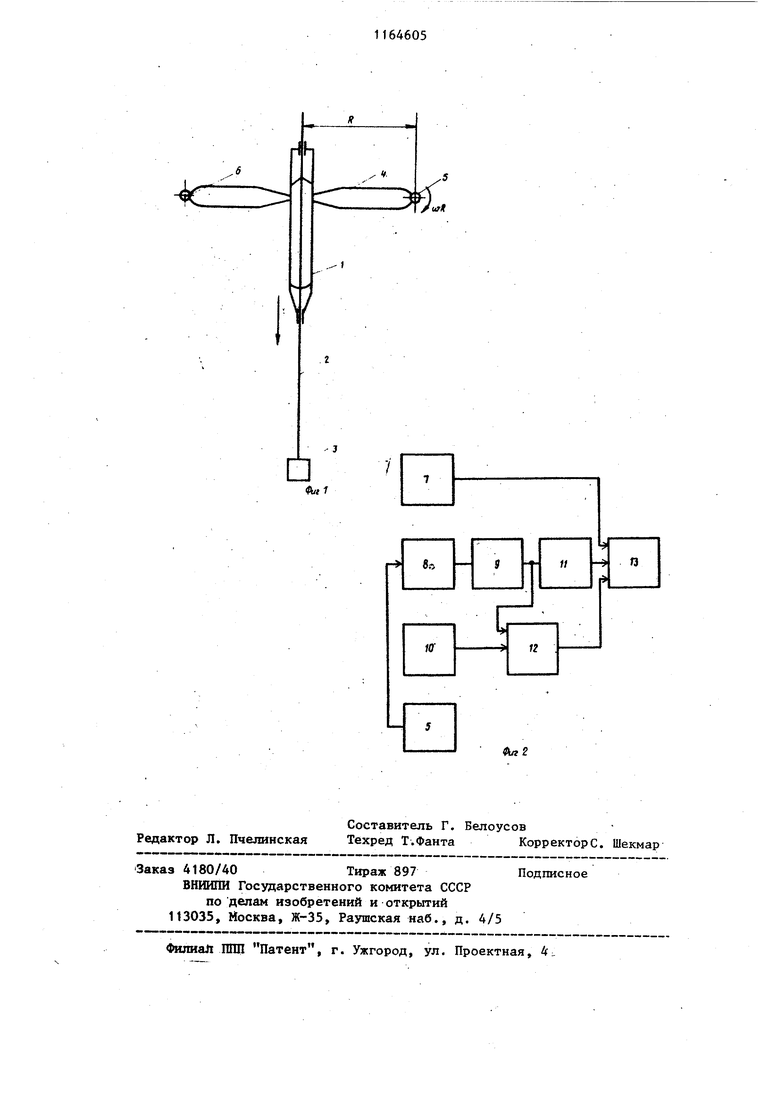
Корпус 1 устройства установлен на тросе 2 с возможностью свободного перемещения по нему. Трос вертикально натянут с помощью груза-за30 глубителя 3 с борта дрейфующего или заякоренного судна (не показано). Корпус снабжен профилированным винтом 4. На конце одной из лопастей винта установлен измеритель 5 ско,, рости течения, а на конце другой лопасти - противовес 6. В корпус вмонтированы также измеритель 7 гидростатического давления (глубины) , усилитель 8 измерителя скорости течения (пульсаций скорости течения), полосовой фильтр 9, феррозонд 10, амплитудный вольтметр 11, измеритель 12 разности фаз и трехканальное устройство 13 записи 45 И хранения информации магнитного или динамического типа.
Выход измерителя давления 7 соединен с входом одного из трех каналов устройства 13 записи и хранения информации. Выход усилителя измерителя скорости течения соединен с ВХО/1ОМ полосового фильтра 9, выход которого через амплитудный вольтметр 11 соединен с входом вто.55 рого канала устройства записи и
хранения информации. Выход феррозонда 10 соединен через измеритель 12 разности фаз с входом третьего 3 канала устройства записи и хранени информации. Все приборы питаются от автономного источника, размещен ного в корпусе устройства (не показан) . Устройство работает следующим образом. Корпус, жестко связанный с винтом, погружается, скользя по направляющему тросу. При этом устанав ливается стационарный режим движения (равновесие силы отрицательной плавучести измерительного комплекс и его гидродинамического сопротивления) . В стационарном режиме угло вая скорость вращения со постоянна. При наличии течения относительная скорость измерителя 5 скорости течения меняется от значения W R + + V- до значения coR - V (1 скорость течения, R - расстояние от оси вращения до чувствительного элемента измерителя 5 скорости течения) , т.е. сигнал на выходе изме рителя скорости.течения для случая линейного преобразования скорость напряжение представляет собой сину соиду, сдвинутую по оси ординат вверх на величину ЫК (предполагается, что ) и загрязненную собственными шумами измерителя 5, а также турбулентными пульсациями в исследуемой среде. Амплитуда это синусоиды пропорциональна на данной глубине скорости течения V. После полосового фильтра 9 выделяется сигнал в виде синусоиды с час тотой, равной частоте вращения измерительного комплекса, амплитуда которой пропорциональна . а фаза сигнала содержит информацию о направлении течения. уровень шумов существенно уменьшается вследствие резкого сужения поло сы пропускания . Одновременно на выходе феррозонда, вращающегося вместе с корпусом, возникает синусоидальный сигнал, фаза которого содержит информацию о положении измерительного комплекса относител но магнитного меридиана Земли. Сдв фаз определяет направление течения 054 на данной глубине, а для измерения этого сдвига фаз служит измеритель 12 разности фаз. Измерения текущей глубины осуществляются датчиком давления 7 (возможно также определение глубины по числу оборотов винта, например, путем счета числа нулей выходного сигнала феррозонда) . Измерение величины скорости течения Vy, которая может меняться с глубиной по мере погружения устройства, производится амплитудным вольтметром 11. Съем информации с устройства записи и хранения выполняют на борту судна после вьтолнения зондирования. Возможен вариант выполнения устройства с акустической, индукционной или другой неконтактной системой передачи информации на борт судна. В этом случае устройство записи и хранения информации исключают из состава приборов и заменяют названной выше системой передачи. Предлагаемое устройство позволяет существенно повысить точность измерений в результате снижения влияния качки судна на результаты измерений, поскольку вертикальные перемещения направляющего троса, вызванные качкой, не влияют на движение корпуса .комплекса, а также вследствие резкого сужения полосы частот измерителя скорости и, соответственно, снижения уровня его собственных шумов. Кроме того, число отсчетов величины и направления скорости течения при вертикальном зондировании данным устройством равно числу оборотов винта и состав-. ляет при глубине до 400 м от 5 до 1О тыс., в то время как аналоги позволяют получать лишь до нескольких десятков отсчетов. Большое число отсчетов дает возможность существенно повысить точность определения профиля скоростей течений, так как помимо снижения статической составляющей погрешности увеличивается пространственное разрешение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Зондирующий комплекс профиля скоростей течения | 1979 |
|
SU792144A1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ВОДЫ В РЕКЕ С ДВИЖУЩЕГОСЯ СУДНА | 1992 |
|
RU2045002C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВНУТРЕННИХ ВОЛН, ВХОДЯЩИХ В СУММАРНОЕ ВОЛНОВОЕ ПОЛЕ | 2000 |
|
RU2192025C2 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СКОРОСТИ И НАПРАВЛЕ НИЯ ТЕЧЕНИЙ, содержащее винт и корпус из немагнитного материала, внутри которого расположены контрольно-измерительная аппаратура, включающая в себя приемник направления в виде феррозондов, измеритель скорости течения, измеритель гидростатического давления, выходы крторых соединены с усилительными блоками, а выходы усилительных блоков - с блоком памяти, отл.ичающее с я тем, что, с целью повышения точности измерений путем исключения влияния качки судна, лопасти профилированного винта жестко связаны с корпусом устройства, вьшолненным симметричным относительно оси винта и имеющим центральное отверстие, при этом датчик скорости установлен на конце лопасти винта. (Л с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зондирующий комплекс профиля скоростей течения | 1979 |
|
SU792144A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СКОРОСТИ и НАПРАВЛЕНИЯ ТЕЧЕНИЙ | 0 |
|
SU276549A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
