Область техники, к которой относится изобретение
Настоящее изобретение относится к управлению обработкой минерального материала и, в частности, но не исключительно, к способу и устройству для управления процессом дробления.
Уровень техники
Дробильная установка, как правило, состоит из дробилки крупного (предварительного) дробления, дробилки среднего (промежуточного) дробления и одной или нескольких дробилок мелкого (дополнительного) дробления и ярусных грохотов. В зависимости от количества дробилок мелкого дробления установка называется двух-, трех- или четырехступенчатой дробильной установкой. В четырехступенчатых дробильных установках вторую дробилку мелкого дробления можно заменить на устройство обработки для формования материала.
Исходный материал подается с помощью колесного погрузчика, землеройной машины или транспортной тележки на питатель, который отмеряет материал для дробилки предварительного дробления. Продукция первой ступени дробления подается транспортером либо непосредственно на промежуточное дробление, либо в дробилку мелкого дробления или грохот. На второй, третьей и четвертой ступени дробление и грохочение продолжаются для получения нужного конечного продукта.
Наиболее распространенным типом питателя является вибрационный питатель, который работает на заранее заданной основной скорости. Обычно щековые дробилки используются в качестве дробилок крупного дробления, жираторные дробилки - в качестве дробилок среднего дробления, а жираторные и(или) конусные дробилки - в качестве дробилок мелкого дробления. Грохоты могут представлять собой, например, одновальные вибрационные грохоты со свободными колебаниями или многовальные ударные грохоты направленного действия.
В настоящее время автоматизированные системы для процессов дробления минерального материала ориентированы на конкретное устройство, а не установку, либо полностью отсутствуют в случае мобильных установок. Для облегчения управления процессом применяются ориентированные на конкретную дробилку поверхностные предохранительные устройства, которые работают по принципу включения-выключения, останавливая и запуская подающее устройство (транспортер или питатель).
Существующие так называемые решения по принципу включения-выключения не оптимизируют производительность процесса дробления, но при этом производительность установки в существенной степени зависит от действий оператора. Оператор может управлять скоростью питателя в соответствии со своей зрительной эмпирической оценкой. Прежде чем начать процесс дробления, оператор должен также вручную отрегулировать рабочие параметры установки для каждого продукта и подающего устройства, отдельно для каждого случая.
Поскольку действия оператора непосредственно влияют на количество и качество получаемого конечного продукта, опыт оператора имеет огромное значение для достижения нужного результата дробления. Отсутствие опыта управления процессом ухудшает результат дробления в отношении объема продукта, нужного гранулометрического состава частиц и качества.
Концентрация оператора на управлении процессом имеет первостепенное значение, поскольку даже небольшая расслабленность приводит к потере управляемости. Например, если производительность питателя превышает производительность дробилки крупного, среднего или мелкого дробления, это приводит к переполнению дробилок. Например, если производительность питателя меньше производительности дробилки крупного, среднего или мелкого дробления, это приводит к так называемому холостому ходу дробилок.
Задача оператора состоит в обеспечении равномерной подачи в питатель, чтобы вся установка работала на оптимальном уровне. С точки зрения оператора контроль над всей ситуацией дополнительно осложняется тем, что материал, подаваемый к питателю землеройной машиной или ковшовым погрузчиком, часто необходимо собирать на большом расстоянии, при этом питатель в течение некоторого времени остается пустым и функционирование процесса ухудшается. Таким образом, перед оператором стоит нелегкая задача поддерживать степень заполнения питателя на оптимальном уровне.
Раскрытие изобретения
В настоящее время изобретена автоматизированная система управления технологическим процессом для дробильной установки, благодаря которой можно устранить или, по меньшей мере, уменьшить упомянутые выше недостатки известного уровня техники.
Способ в соответствии с настоящим изобретением позволяет, по меньшей мере, частично, заменить корректирующие действия оператора при управлении процессом дробления.
Система перестает в значительной степени зависеть от действий оператора дробления, поскольку оператору в меньшей степени приходится выполнять ручное регулирование. Поэтому у оператора остается больше времени на выполнение других задач, например на слежение за тем, чтобы процесс в любой момент был обеспечен достаточным количеством материала. Помимо загрузки и(или) задания параметров управления задачей оператора остается слежение за подачей материала для обработки в достаточном количестве. Питатель должен быть заполнен в максимально возможной степени, чтобы система обработки работала оптимально и управляла объемом переработки, осуществляемой установкой, на оптимальном уровне.
Автоматическое управление технологическим процессом оптимизирует производительность дробильной установки. Кроме того, оно способствует повышению качества конечного продукта и поддержанию нужного гранулометрического состава частиц. В дополнение к этому, регулировочные параметры, значения которых признаны подходящими, можно использовать непосредственно в качестве значений по умолчанию, например, при изменении подающего устройства или внесении изменений в конечный продукт. Регулировочные параметры процесса можно заранее сохранять в соответствии с используемым подающим устройством и(или) изготавливаемым конечным продуктом и быстро загружать для использования в случае необходимости. Различия в процессе управления, связанные с конкретным пользователем, можно свести к минимуму.
Благодаря выводу процесса дробления на оптимальный уровень дополнительно обеспечивается более однородное качество конечного продукта и меньшее потребление энергии без изменений в управлении процессом.
Для достижения этих целей способ согласно настоящему изобретению отличается признаками отличительной части независимого пункта 1 формулы.
Дробильная установка согласно настоящему изобретению отличается признаками отличительной части независимого пункта 6 формулы.
Система согласно настоящему изобретению отличается признаками отличительной части независимого пункта 11 формулы.
Компьютерный программный продукт согласно настоящему изобретению отличается признаками отличительной части независимого пункта 12 формулы.
Компьютерный программный продукт может храниться на машиночитаемом носителе.
Настоящее изобретение применимо к управлению процессом дробления различных минеральных материалов в дробильных установках. К таким установкам относятся стационарные, передвижные и мобильные установки, такие как дробильные установки на гусеничном ходу.
Краткое описание чертежей
Ниже изобретение описывается более подробно со ссылкой на прилагаемые схематические чертежи.
На фиг.1 представлена дробильная установка.
На фиг.2 представлено описание способа настоящего изобретения в виде блок-схемы.
На фиг.3 представлена передвижная дробильная установка.
На фиг.4 представлена система, образованная дробильными установками.
Осуществление изобретения
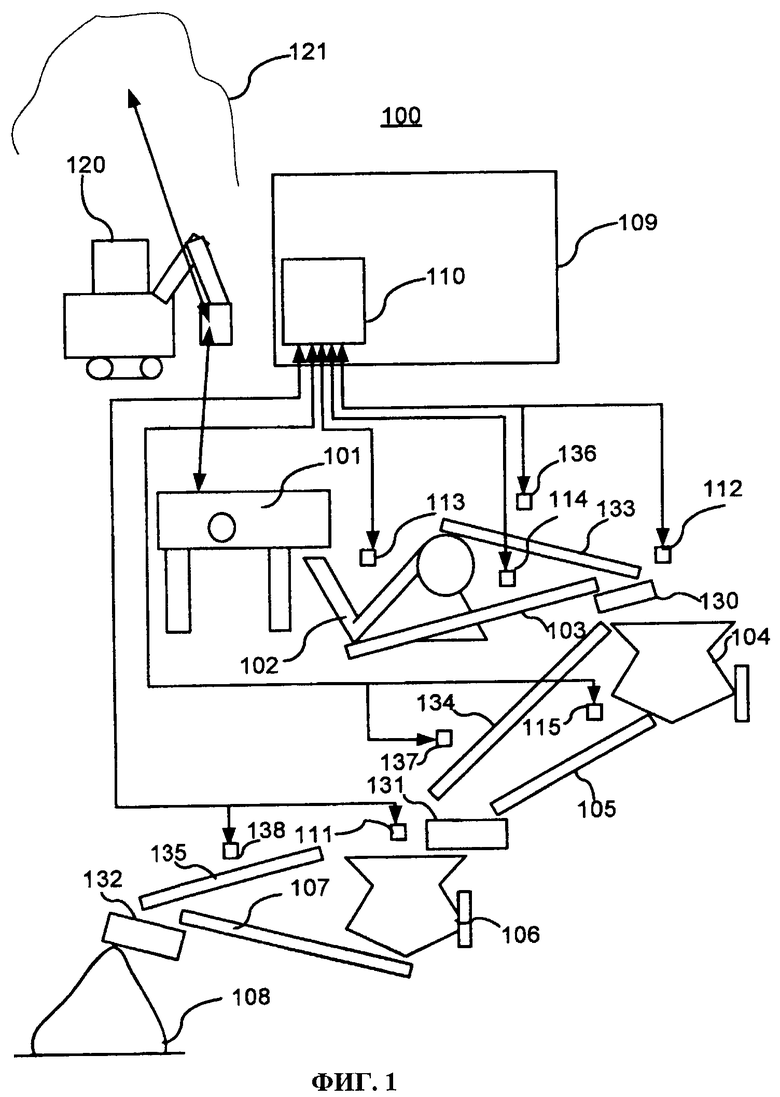
На ФИГ.1 представлена дробильная установка 100, которая предпочтительно реализована в виде стационарной установки. Альтернативно, аналогичное устройство может быть представлено несколькими передвижными частями дробильной установки или самоходными мобильными дробильными установками. Дробильная установка состоит из питателя 101, дробилки 102 крупного дробления, первого транспортера 103, дробилки 104 среднего дробления, второго транспортера 105 и дробилки 106 мелкого дробления. Кроме того, дробильная установка содержит разгрузочный транспортер 107 для выгрузки конечного продукта, например, в кучу 108. Дробильная установка предпочтительно содержит грохот 130, с помощью которого надрешетная фракция отсеивается из материала, раздробленного в дробилке 102, после чего эта надрешетная фракция перемещается обратно к дробилке 102 по транспортеру 133. В случае однодечного грохота подрешетный, т.е. грохоченный, материал подвергается дроблению в дробилке 104. В случае двухдечного грохота надрешетная фракция нижней деки направляется к дробилке 104, а подрешетный материал направляется мимо дробилки 104, например, к транспортеру 105. Грохоты 131 и 132 и транспортеры 134 и 135, присоединенные к ним, функционируют соответствующим образом.
Дробильная установка содержит также датчики (111-113, 114, 115, 136-138) объема, с помощью которых количество подвергаемого дроблению материала измеряется в виде объема, находящегося в дробилках (102, 104 и 106) и на транспортерах (103, 105, 107, 133, 134, 135).
Дробильная установка содержит один или несколько датчиков, расположенных над транспортерами, для измерения объемного потока перемещаемого материала. В предпочтительном варианте осуществления настоящего изобретения указанный датчик размещается на транспортере между дробилкой 102 крупного дробления и дробилкой 104 среднего дробления и(или) на транспортере 105, подающем материал к дробилке 106 мелкого дробления. Датчик предпочтительно представляет собой, например, ультразвуковой датчик, однако можно также использовать и другие соответствующие датчики типов, подходящих для измерения объемного потока материала, движущегося с помощью транспортера.
Кроме того, дробильная установка содержит операторский пост 109 управления, который, как правило, представляет собой переносной или стационарный пульт управления с дисплеем и пользовательским интерфейсом для управления процессом дробления. Кроме того, в состав поста управления входит управляющий модуль 110 для реализации способа настоящего изобретения в дробильной установке. Управляющий модуль принимает информацию, такую как данные измерений, например, от датчиков 111-115 и 136-138. Кроме того, он может собирать поступающую от дробилок информацию об их скорости вращения или потреблении энергии, а также от транспортеров и питателя - о потреблении энергии или значениях давления в гидравлической системе и, благодаря этому, о скорости перемещения и количестве материала.
Устройство, представленное на фиг.1, соответствует так называемому трехступенчатому процессу дробления. Первая ступень сформирована питателем 101 и дробилкой 102 крупного дробления, вторая ступень - дробилкой 103 среднего дробления и транспортером 105, а третья ступень - дробилкой 106 мелкого дробления и разгрузочным транспортером 107. Оператор работает с землеройной машиной 120 или аналогичным устройством подачи материала, таким как ковшовый погрузчик, и перемещает подлежащий дроблению материал из кучи 212 к питателю 101.
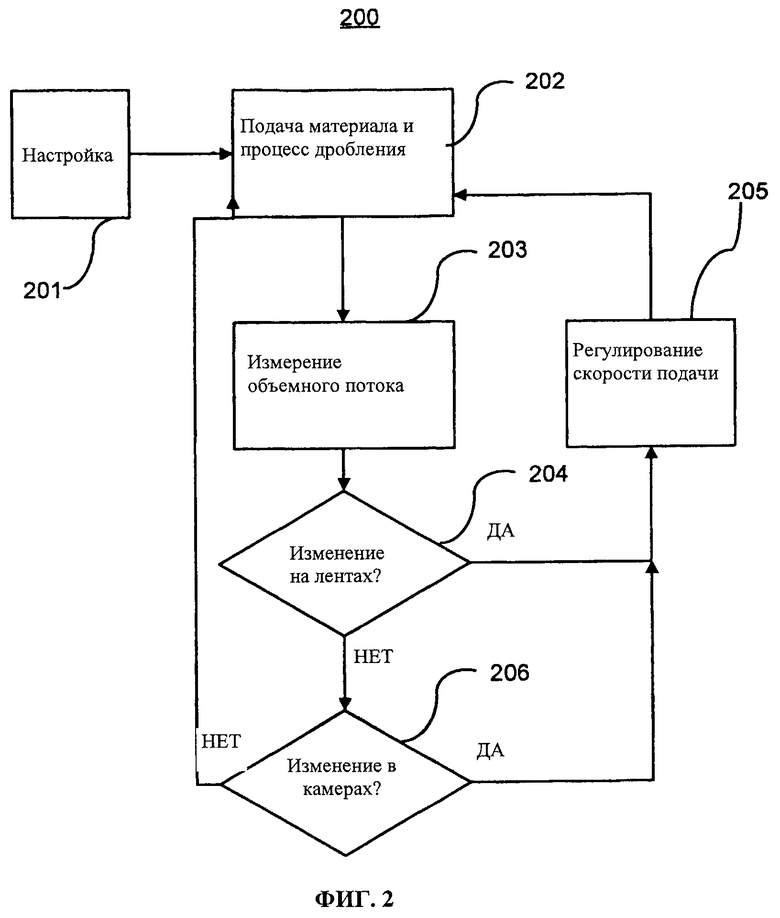
На фиг.2 представлен способ настоящего изобретения, ступени которого предпочтительно могут быть осуществлены в виде кода программы компьютерного программного продукта. Иллюстрируемый способ реализован в среде двухступенчатого процесса дробления, т.е. в процессе дробления используются две отдельные дробилки. Способ настоящего изобретения может применяться к многоступенчатым процессам дробления, представленным со ссылкой на фиг.1, 3 или 4.
На этапе 201 задают начальные значения системы путем ввода значений с помощью пользовательского интерфейса операторского поста 109 управления. Оператор задает начальные значения, такие как значения настройки дробилок в соответствии со свойствами, размером частиц и гранулометрическим составом подвергаемого дроблению материала. Кроме того, оператор определяет максимальную скорость питателя, т.е. количество импульсов перемещения в единицу времени, подаваемых питателем к подвергаемому дроблению материалу. Нижний предел частоты может составлять, например, 25 Гц в зависимости от питателя или характеристик питателя. Верхний предел может определяться для каждого конкретного случая в ходе процесса дробления в зависимости от характеристик питателя и(или) настройки питателя, выпускаемого сорта или качества подающего устройства. Иными словами, поток материала, обусловленный управляемой производительностью питателя, организован с возможностью соответствия другому процессу и, в особенности, соответствия производительности дробилок мелкого дробления.
Контроль высоты поверхности в камере дробилки крупного дробления предпочтительно осуществляется по принципу включения-выключения, как у ультразвукового датчика, который располагается на подходящем уровне в стороне от воронки горловины. Оператор задает параметры управления дробилки крупного дробления.
Измерение потока материала подъемного транспортера может быть осуществлено, например, с помощью аналогового (4-20 мА/0-10 В) ультразвукового датчика. Могут также применяться другие датчики, подходящие для измерения потока материала. С помощью пользовательского интерфейса поста управления оператор задает необходимые контрольные пределы, которые могут изменяться в зависимости, например, от скорости транспортера и высоты перемещаемого материала. Контрольный предел может быть выражен, например, в кубических метрах в секунду или в виде другой подходящей единицы.
На этапе 202 начинается процесс дробления, когда подлежащий дроблению материал подается к питателю, например, с помощью землеройной машины, ковшового погрузчика или каким-либо иным способом. Пост (109, 110) управления может быть выполнен с возможностью приема информации (не показано на чертеже) о потреблении энергии, скоростях колебаний, значениях давления в гидравлической системе или другой соответствующей информации об устройствах 101-105, которая может использоваться при управлении процессом дробления.
На этапе 203 в ходе процесса дробления поток материала, перемещаемого транспортером 103 (115), предпочтительно непрерывно измеряется в процессе дробления. Измерение может также производиться в те или иные моменты времени через заданные или произвольные интервалы.
На этапе 204 проверяется, не произошло ли в объемном потоке материала, проходящего по ленте определенного или каждого транспортера, изменения в сторону увеличения (соответственно, в сторону уменьшения) по сравнению с заданными предельными значениями. Если имеет место изменение величины объемного потока, на этапе 205 скорость питателя 101 регулируется в сторону уменьшения (соответственно, в сторону увеличения), чтобы удерживать его в диапазоне заданных предельных значений. Альтернативно, питатель 101 может быть полностью остановлен на заранее заданное время или заторможен до скорости, при которой питатель не обладает способностью подачи материала. Производительность питателя 101 контролируется, главным образом, при измерении потока материала на транспортере 103, 133 и(или) 105, 134 и, в ином случае, при измерении объема материала, подвергаемого дроблению в дробилках 102-105. Целью этого контроля является управление потоком материала, направляемого к дробилке мелкого дробления, и за счет этого действенный контроль высоты поверхности в дробилке мелкого дробления с помощью информации о количестве материала, находящегося в так называемом цикле обработки, а также с помощью предполагаемого увеличения или уменьшения высоты поверхности в дробилке мелкого дробления. При этом преследуется цель поддержания количества материала на подъемном транспортере 103, 105, 107, 133-135, подающем его к дробилке мелкого дробления, на нужном уровне путем регулирования скорости питателя 101 при необходимости.
В качестве альтернативы или дополнения к изложенному выше, скорость подъемного транспортера 103, 105, 107, 133-135 можно изменять в сторону увеличения или уменьшения в зависимости от нужного конечного продукта путем увеличения или уменьшения объема потока материала, перемещаемого в единицу времени. Регулирование скорости подъемного транспортера вместе с регулированием скорости питателя уже улучшает управление.
На этапе 206 определяется высота поверхности в дробильной камере дробилки 102 крупного дробления. Когда поверхность остается на высоком уровне в течение заранее заданного времени, питатель притормаживается, и после установленного периода времени останавливается. После того как уровень поверхности понижается, спустя установленное время питатель автоматически запускается. Наблюдение за высотой поверхности ведется с целью предотвращения переполнения дробилки крупного дробления и, с другой стороны, предотвращения холостого хода, при поддержании горловины в полном состоянии.
Соответственно, определяется высота поверхности в дробильной камере дробилки 104 промежуточного дробления. Когда поверхность остается на высоком уровне в течение заранее заданного времени, питатель 101 и(или) транспортер 103 притормаживаются, и после установленного периода времени питатель и(или) транспортер останавливаются. После того как уровень поверхности понижается, спустя установленное время питатель и(или) транспортер автоматически запускаются. Наблюдение за высотой поверхности ведется с целью предотвращения переполнения дробилки среднего дробления и, с другой стороны, предотвращения холостого хода, как и в случае с дробилкой крупного дробления.
Высоту поверхности в камере дробления второй дробилки мелкого дробления 106 также можно измерять. Когда поверхность остается на высоком уровне в течение заранее заданного времени, питатель 101 и(или) транспортер 103 и(или) транспортер 105 притормаживаются, и после установленного периода времени питатель и(или) транспортер 103 и(или) транспортер 105 останавливаются. После того как уровень поверхности понижается, спустя установленное время питатель и(или) транспортеры автоматически запускаются управляющим модулем 109, 110. Наблюдение за высотой поверхности ведется с целью предотвращения переполнения дробилки мелкого дробления и, с другой стороны, предотвращения ее холостого хода.
На этапе 205 управляющий модуль 109, 110 регулирует скорость подачи материала, подаваемого питателем 101 в соответствии с этапами 204 и 206, на основе информации, измеряемой датчиками 111-115. Дополнительно или альтернативно, управляющий модуль 109, 110 может регулировать скорости транспортеров 103 и(или) 105, 133-135 на основе измерительной информации.
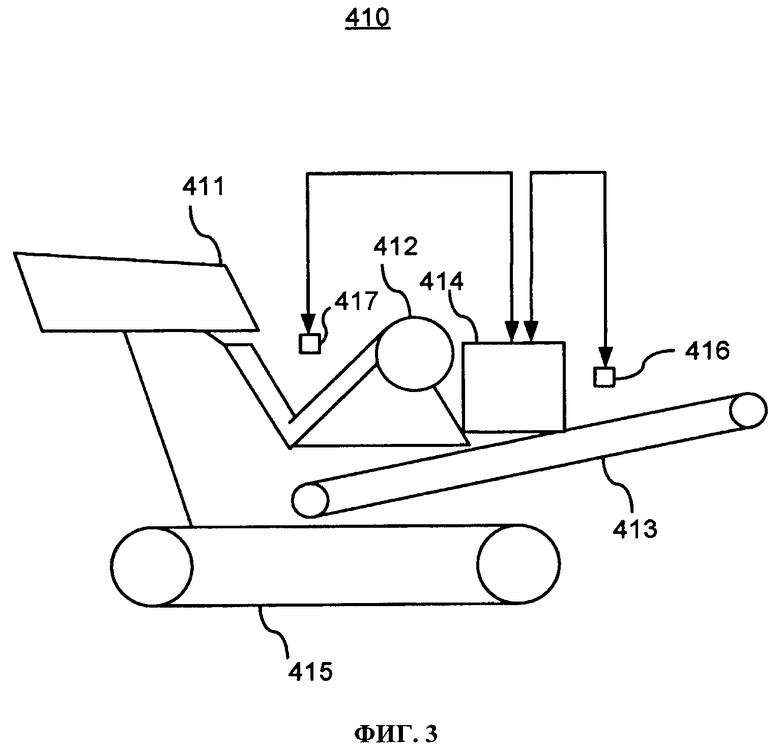
На фиг.3 представлена мобильная дробильная установка 410 на гусеничном ходу, которая содержит питатель 411, дробилку 412 крупного дробления, например щековую дробилку, транспортер 413, управляющий модуль 414, гусеничное шасси 415, датчик 416 объема транспортера и датчик 417 объема дробильной камеры дробилки. Передвижная дробильная установка может также перемещаться с помощью других средств, таких как колеса или опоры.
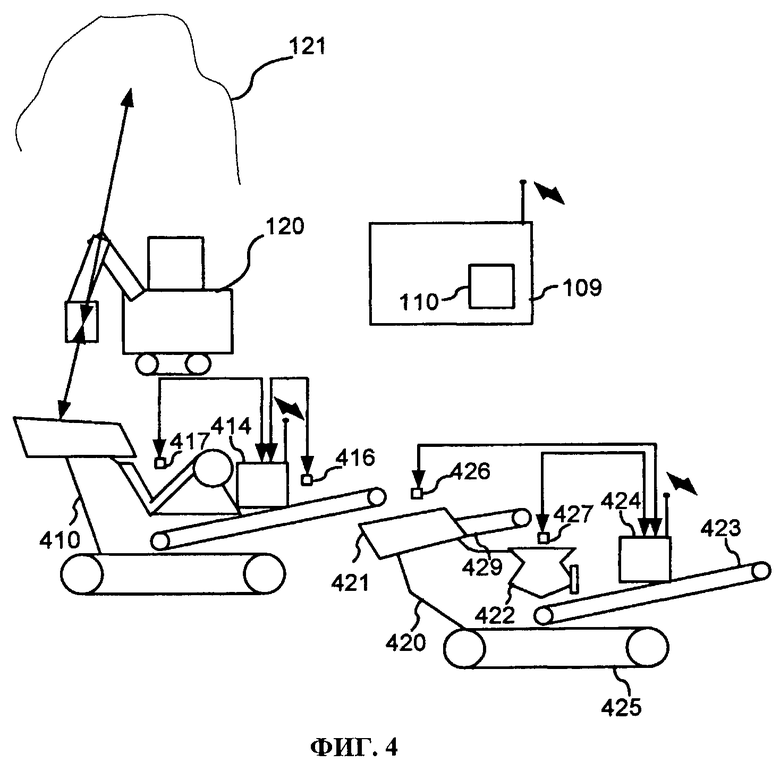
На фиг.4 представлена система, состоящая из нескольких передвижных дробильных установок, которая содержит первую дробильную установку 410, вторую дробильную установку 420 и операторский рабочий пост 109. Описанный выше способ настоящего изобретения может применяться к этой системе.
Первая дробильная установка более подробно описана на фиг.3. Вторая дробильная установка 420 содержит питатель 421, в состав которого предпочтительно входят также транспортер, дробилка 422 мелкого дробления, например конусная или жираторная дробилка, разгрузочный транспортер 423, управляющий модуль 424, гусеничное шасси 425, датчик 427 объема дробильной камеры дробилки, датчик 427 объема и датчик 426 объема питателя 421, 429.
Кроме того, система содержит операторский управляющий пост 109, обладающий беспроводным соединением с передвижными дробильными установками 410 и 420.
В процессе дробления подлежащий дроблению материал подается оператором 120 к питателю 411 первой дробильной установки 410, откуда он подается далее в дробилку 412 крупного дробления, которая в случае проиллюстрированного здесь применения представляет собой щековую дробилку. Из щековой дробилки предварительно раздробленный каменный материал передается через транспортер 413 дальше на питатель 421 второй дробильной установки 420, причем данный питатель может действовать в качестве устройства промежуточного хранения перед дробилкой 422 мелкого дробления. Датчик 416 объема первой дробильной установки 410 и датчик 426 объема второй дробильной установки измеряют количество и предпочтительно объем материала, поступающего в дробилку 422 мелкого дробления.
Обе дробильные установки соединены линией связи с операторским постом управления через управляющие модули 414, 424, которые выполнены с возможностью сбора измерительной информации о параметрах, относящихся к дроблению, и их дальнейшей передачи на пост 109 управления. Информация, измеренная датчиками 416 и 426 и, альтернативно, датчиками 417 и 426, передается на пост 109 управления предпочтительно через беспроводное соединение, где она обрабатывается с помощью одного из способов настоящего изобретения в управляющем модуле 110 поста управления, представляющем собой компьютерный программный продукт, с помощью которого формируется управляющая информация питателя 411, 421, 429. Далее указанная информация направляется через линию связи на управляющий модуль 414 первой дробильной установки 410, и от него дальше на систему управления питателя 411. Соответственно, указанная информация направляется дальше через линию связи на управляющий модуль 424 второй дробильной установки 420, и от него далее на систему управления питателя 421, 429. В предпочтительном варианте осуществления настоящего изобретения пост 109 управления расположен в непосредственной близости от оператора 120, например в кабине землеройной машины, в виде беспроводного дисплея с графическим пользовательским интерфейсом.
Один из вариантов осуществления настоящего изобретения является особенно пригодным для управления обработкой минерального материала. В качестве минерального материала, представляемого в этой связи, может выступать руда, добываемый камень или гравий, различные виды подлежащих повторному использованию строительных отходов, таких как бетон, керамические материалы или асфальт.
Объем настоящего изобретения не ограничивается приведенными выше в целях иллюстрации примерами его осуществления. Напротив, оно предназначено для широкого применения в рамках идеи изобретения, определяемой прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДРОБИЛЬНО-КЛАССИФИЦИРУЮЩИЙ КОМПЛЕКС | 1996 |
|
RU2111794C1 |
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТОМ ДЛЯ ПЕРЕРАБОТКИ МИНЕРАЛЬНЫХ МАТЕРИАЛОВ И АГРЕГАТ ДЛЯ ПЕРЕРАБОТКИ МИНЕРАЛЬНЫХ МАТЕРИАЛОВ | 2013 |
|
RU2639541C2 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ МИНЕРАЛЬНОГО МАТЕРИАЛА, А ТАКЖЕ СООТВЕТСТВУЮЩИЕ СПОСОБ И СИСТЕМА | 2014 |
|
RU2648332C2 |
| СПОСОБ УПРАВЛЕНИЯ ЗАВОДОМ ПО ОБРАБОТКЕ МИНЕРАЛЬНЫХ МАТЕРИАЛОВ И ЗАВОД ПО ОБРАБОТКЕ МИНЕРАЛЬНЫХ МАТЕРИАЛОВ | 2013 |
|
RU2650531C2 |
| СПОСОБ УПРАВЛЕНИЯ ЗАВОДОМ ПО ОБРАБОТКЕ МИНЕРАЛЬНОГО СЫРЬЯ И ЗАВОД ПО ОБРАБОТКЕ МИНЕРАЛЬНОГО СЫРЬЯ | 2013 |
|
RU2651280C2 |
| СПОСОБ УПРАВЛЕНИЯ ДРОБИЛКОЙ, ДРОБИЛЬНАЯ СИСТЕМА И ДРОБИЛЬНАЯ УСТАНОВКА | 2014 |
|
RU2654752C2 |
| ДРОБИЛЬНО-КЛАССИФИЦИРУЮЩИЙ КОМПЛЕКС | 1999 |
|
RU2156167C1 |
| Способ автоматического управления дробильно-сортировочным процессом | 1989 |
|
SU1616703A1 |
| Устройство для управления многостадийным процессом дробления | 1982 |
|
SU1036374A1 |
| СПОСОБ ПЕРЕРАБОТКИ МИНЕРАЛЬНЫХ МАТЕРИАЛОВ И ПЕРЕРАБАТЫВАЮЩАЯ УСТАНОВКА | 2012 |
|
RU2601583C2 |
Изобретение относится к дробильной установке, способу и системе для управления процессом дробления. Дробильная установка содержит питатель, дробилку первой ступени для дробления подаваемого материала, дробилку второй ступени для дробления раздробленного материала и транспортер для перемещения раздробленного материала от первой дробилки ко второй дробилке. Дробильная установка содержит средства измерения для измерения объемного потока раздробленного материала и средства управления для регулирования скорости подачи материала, подвергаемого дроблению, в ответ на изменение объемного потока раздробленного материала. С помощью средств измерения в одной или нескольких точках между двумя или большим количеством ступеней дробления измеряют объемный поток материала. С помощью средств управления регулируют скорость подачи материала, подвергаемого дроблению в дробилке следующей ступени, в ответ на изменение объемного потока материала, раздробленного на предыдущих ступенях. Машиночитаемый носитель с хранящимся на нем компьютерным программным продуктом для управляющего модуля управляет процессом дробления в дробильной установке. Система управления технологическим процессом дробильной установки позволяет заменить корректирующие действия оператора при управлении процессом дробления. 4 н. и 8 з.п. ф-лы, 4 ил.
1. Способ управления процессом дробления минерального материала в устройстве дробления, которое содержит питатель (101) для подачи материала, подвергаемого дроблению, дробилку (102) первой ступени для дробления материала, подаваемого питателем (101), по меньшей мере, одну дробилку (104, 106) следующей ступени для дробления материала, раздробленного на предыдущей ступени, и, по меньшей мере, один транспортер (103, 105, 107) для подачи раздробленного материала с дробилки предыдущей ступени к дробилке следующей ступени, в котором материал, подвергаемый дроблению, подают в дробилку первой ступени; отличающийся тем, что
- измеряют объемный поток материала в одной или нескольких точках между двумя или большим количеством ступеней дробления с помощью средств (111-115) измерения; и
- регулируют скорость подачи материала, подвергаемого дроблению в дробилке следующей ступени, с помощью средств (109, 110) управления в ответ на изменение объемного потока материала, раздробленного на предыдущих ступенях.
2. Способ по п.1, отличающийся тем, что измеряют кратковременное изменение объема материала, остающегося в дробильной камере дробилки.
3. Способ по п.1, отличающийся тем, что измеряют кратковременное изменение объема материала, подаваемого на транспортере.
4. Способ по п.2 или 3, отличающийся тем, что регулируют подачу первой дробилки в ответ на измеренное кратковременное изменение объема.
5. Способ по п.2 или 3, отличающийся тем, что регулируют подачу второй дробилки в ответ на измеренное кратковременное изменение объема.
6. Дробильная установка (100) для дробления материала, содержащая питатель (101) для подачи в дробилку подвергаемого дроблению материала, дробилку (102) первой ступени для дробления подаваемого материала, по меньшей мере, одну дробилку (104, 106) следующей ступени для дробления материала, раздробленного на предыдущей ступени, и, по меньшей мере, один транспортер (103, 105, 107) для подачи раздробленного материала с дробилки первой ступени в дробилку следующей ступени, отличающаяся тем, что дробильная установка (100) содержит средства (111-115) измерения объемного потока раздробленного материала в одной или нескольких точках между двумя или большим количеством ступеней и средства (109, 110) управления для регулирования скорости подачи материала, подвергаемого дроблению, в дробилку следующей ступени в ответ на изменение объемного потока материала, раздробленного на предыдущих ступенях.
7. Дробильная установка по п.6, отличающаяся тем, что содержит средства (111-113) измерения для измерения объема материала, находящегося в дробильной камере дробилки (102, 104, 106).
8. Дробильная установка по п.6, отличающаяся тем, что содержит средства (114-115) измерения для измерения объема материала, подаваемого на транспортере (103, 105).
9. Дробильная установка по п.7 или 8, отличающаяся тем, что средства (109, 110) управления выполнены с возможностью регулирования подачи в первую дробилку (102) с транспортера (103) на основе измеряемого объемного потока.
10. Дробильная установка по п.7 или 8, отличающаяся тем, что средства (109, 110) управления выполнены с возможностью регулирования подачи во вторую дробилку (104) с транспортера (103) на основе измеряемого объемного потока.
11. Система управления процессом дробления, содержащая дробильную установку (410) первой ступени, которая, в свою очередь, содержит питатель (411) первой ступени для подачи материала, дробилку (412) первой ступени для дробления подаваемого материала, транспортер (413) для перемещения раздробленного материала, по меньшей мере, к одной дробильной установке (420) следующей ступени, при этом система содержит, по меньшей мере, одну дробильную установку (420) следующей ступени, которая, в свою очередь, содержит питатель (421, 429) следующей ступени для подачи материала, раздробленного на предыдущей ступени, к дробилке следующей ступени, и дробилку (422) следующей ступени для дробления материала, раздробленного на предыдущей ступени, отличающаяся тем, что содержит средства (416, 417, 426, 427) измерения объемного потока раздробленного материала в одной или нескольких точках между двумя или большим количеством ступеней дробления и средства (109, 110) управления для регулирования скорости подачи материала, подвергаемого дроблению, к дробилке следующей ступени в ответ на изменение объемного потока материала, раздробленного на предыдущих ступенях.
12. Машиночитаемый носитель с хранящимся на нем компьютерным программным продуктом для управляющего модуля (109, 110), который управляет процессом дробления в дробильной установке (100), содержащей питатель (101, 411, 421, 429) для подачи материала, подвергаемого дроблению, дробилку (102, 412) первой ступени для дробления материала, поступающего от питателя, по меньшей мере, один транспортер (103, 105, 107, 413, 423) для перемещения раздробленного материала с дробилки первой ступени к дробилке следующей ступени, причем компьютерный программный продукт содержит компьютерные программные средства для управления управляющим модулем (109, 110), задавая измерение объемного потока материала в одной или нескольких точках между двумя или большим количеством ступеней дробления, и компьютерные программные средства для управления управляющим модулем (109, 110), задавая регулирование скорости подачи материала, подвергаемого дроблению, в дробилку следующей ступени в ответ на изменение объемного потока материала, раздробленного на предыдущих ступенях.
| US 4179074 A, 18.12.1979 | |||
| DE 19727348 A1, 07.01.1999 | |||
| US 4281800 A, 04.08.1981 | |||
| ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ОБРАБОТКИ СЫРЬЯ ИЗ ГЛИНИСТЫХ ГРУНТОВ ДЛЯ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 1993 |
|
RU2036014C1 |

