Изобретение относится к области аэродинамики, в частности к автоматическим системам управления воздушным потоком в аэродинамических трубах.
При применении регулируемых сопл значительную трудность представляет высокая точность задания их контуров при испытаниях в потоке для получения заданных чисел Маха (М) и требуемой равномерности рабочего потока. В случае, когда контур задается с помощью нескольких приводных рядов управления подвижными гибкими стенками сопла, установка его требуемого профиля в функции числа М становится особенно сложной и при рассогласовании ординат приводных рядов ведет к срыву эксперимента, и, как следствие, к дополнительным временным и энергетическим затратам, удорожая эксперимент.
Известно устройство автоматического регулирования контура сопла с аналоговым командным устройством управления (Авторское свидетельство СССР №280944, МПК G01М 9/00, 1969). Устройство содержит гидроцилиндры, связанные с выходами электрогидравлических преобразователей, управляющие обмотки которых подключены к соответствующим сельсинам-приемникам, соединенным через дифференциальные сельсины с сельсинами-датчиками, кинематически связанными с кулачками узла задания.
Однако это устройство имеет ручной ввод поправки контура сопла при его доводке, осуществляемый путем поворота статоров сельсинов-датчиков, что усложняет наладку сопла и снижает его точность.
За прототип принято устройство управления гибкими стенками сопла аэродинамической трубы, содержащее гидроцилиндры, соединенные с гибкими стенками сопла и сельсинами-приемниками, выполняющие функцию силового механизма-изменения контура сопла, и кулачковый механизм с сельсинами-датчиками и блоком коррекции, выполняющий функцию командного устройства задания контура сопла (Авторское свидетельство СССР №587448, МПК G01М 9/00, 1978).
Однако это устройство имеет ряд недостатков, влияющих на качество контура сопла: неравномерный износ кулачкового механизма аналогового командного устройства, сравнительно невысокая точность следящей системы, необходимость ввода дополнительного блока коррекции контура гибких стенок сопла создает значительные трудности в подготовке эксперимента, снижает надежность эксплуатации сопла и точность установки гибких стенок.
Задачей и техническим результатом изобретения является создание устройства для управления гибкими стенками сопла аэродинамической трубы, позволяющего увеличить точность установки гибких стенок сопла в функции числа М без последующей коррекции, а также обеспечить надежность и простоту эксплуатации сопла.
Решение поставленной задачи и технический результат достигаются тем, что в устройстве для управления гибкими стенками сопла аэродинамической трубы, содержащем ЭВМ, контроллер управления приводами рядов гибких стенок сопла, приводы управления гибкими стенками сопла, датчики обратной связи, а также командное устройство, командное устройство выполнено в виде последовательно включенных цифрового блока определения конечного положения ведущего ряда в функции заданного числа М, цифрового блока задания интенсивности движения ведущего ряда, определяющему заданное значение ординаты ведущего ряда на каждый такт управления и цифрового блока задания ординат ведомых рядов в функции заданной ординаты ведущего ряда.
Вход цифрового блока определения конечного положения ведущего ряда гибких стенок сопла в функции заданного числа М подключен к ЭВМ, а выход подключен к входу цифрового блока задания интенсивности движения ведущего ряда, определяющему заданное значение ординаты ведущего ряда на каждый такт управления, выход блока задания интенсивности подключен к входу цифрового блока задания ординат всех ведомых рядов в функции заданной ординаты ведущего ряда, а выход последнего подключен к контроллеру управления приводами ведомых рядов гибких стенок сопла.
На фиг.1 приведена структурная схема системы автоматического управления регулируемым соплом для одного приводного ряда гибких стенок сопла.. Другие приводные ряды управляются по аналогичной схеме.
Регулируемое сопло 1 имеет две гибкие стенки 2 и 3. Изменение профиля сопла осуществляют с помощью механических силовых редукторов 4, по 4 единицы на каждый приводной ряд гибких стенок сопла. Редукторы 4 объединены одним валом с электродвигателем 5. Управление электродвигателем осуществляет контроллер 7 управления приводом ряда гибких стенок сопла через тиристорный преобразователь 6. Контроль текущего положения ряда стенки сопла осуществляет цифровой датчик положения 9. Общее задание на изменение контура сопла выдает управляющая ЭВМ 10 на командное цифровое устройство управления приводом сопла 13, состоящее из последовательно включенных цифрового блока 12 определения конечного положения ведущего ряда в функции заданного числа М, цифрового блока 11 задания интенсивности движения ведущего ряда, определяющему заданное значение ординаты ведущего ряда на каждый такт управления и цифрового блока 8 задания ординат ведомых рядов в функции заданной ординаты ведущего ряда.
Задание от управляющей ЭВМ 10 поступает в виде заданного на эксперимент числа М3 в блок 12 определения конечного положения ведущего ряда, который преобразует его в конечную ординату ряда в функции числа М Н1к(М3). В качестве ведущего выбирают ряд, определяющий эффективную площадь критического сечения сопла (ряд 1). Значение конечной ординаты ряда Hi к поступает в блок 11 задания интенсивности движения ведущего ряда, который с темпом Ткв выдает порцию (квант) задания Н1кв на изменение ординаты ведущего ряда в блок 8 задания ординат ведомых рядов. Блок 8 рассчитывает задание на изменение ординаты ведомого ряда в функции задания ведущему Н1кв(Н1кв), где i=2,3,…,n, a n - число ведомых рядов, с заданной точностью. Это задание в цифровом виде поступает в соответствующий контроллер 7 управления приводами ведомых рядов гибких стенок сопла. Контроллер 7 управления приводами ведомых рядов гибких стенок сопла сравнивает заданную ординату Нiкв с текущей измеренной, полученной от цифрового датчика 9, и, в случае их рассогласования, регулятор положения контроллера 7 управления приводами ведомых рядов гибких стенок сопла вырабатывает сигнал управления электроприводом ряда Ui, принимаемый тиристорным преобразователем 6. Тиристорный преобразователь 6 формирует и подает на ротор двигателя 5 сигналы управления двигателем, который вращаясь с заданной скоростью перемещает ряды стенок сопла 2 и 3 через силовые редукторы 4.
Управление ведут синхронно по всем приводным рядам до тех пор, пока значения их ординат не достигнут заданных конечных с заданной точностью.
Результаты использования устройства подтверждены математическим моделированием.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СОГЛАСОВАНИЯ ПРИВОДНЫХ РЯДОВ ГИБКИХ СТЕНОК СОПЛА АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 2012 |
|
RU2506555C1 |
| СПОСОБ УПРАВЛЕНИЯ ГИБКИМИ СТЕНКАМИ СОПЛА АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 2012 |
|
RU2506554C1 |
| Устройство для управления гибкими стенками сопла аэродинамической трубы | 1976 |
|
SU587448A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ВЕНТИЛЯТОРНОЙ УСТАНОВКИ | 2008 |
|
RU2402683C2 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ПЕЧАТАЮЩЕЙ ГОЛОВКИ ДЛЯ 3D-ПРИНТЕРА | 2014 |
|
RU2552235C1 |
| СИСТЕМА И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ | 2007 |
|
RU2476038C2 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАГРЕВАТЕЛЯМИ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2571728C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2013 |
|
RU2538322C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
Изобретение относится к области экспериментальной аэродинамики, в частности к аэродинамическим трубам с регулируемыми соплами. Устройство состоит из силового механизма, изменяющего его контур по заданной программе, и командного устройства, управляющего этой программой. В контур управления введены последовательно включенные блок определения конечного положения ведущего ряда в функции заданного числа М, блок задания интенсивности движения ведущего ряда в функции времени управления и блок задания ординат ведомых рядов в функции заданной ординаты ведущего ряда, что позволяет с высокой точностью и скоростью изменять контур сопла. Технический результат заключается в повышении точности установки гибких стенок сопла аэродинамической трубы, а также надежности и простоты эксплуатации сопла. 1 ил.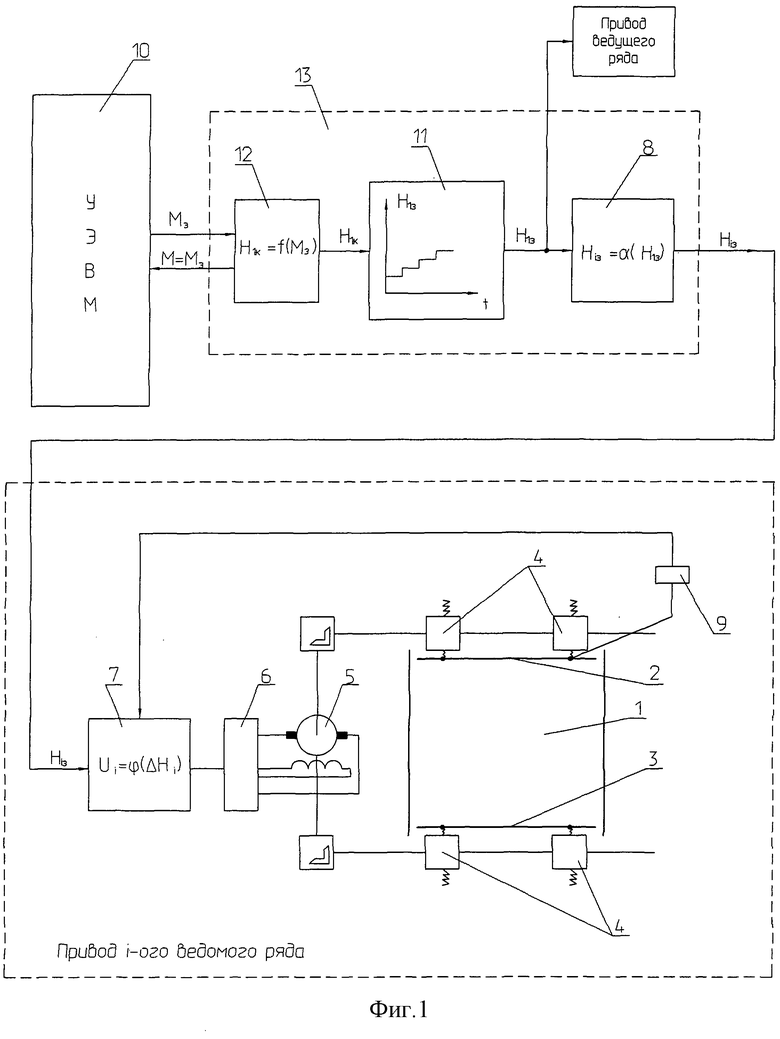
Устройство для управления гибкими стенками сопла аэродинамической трубы, содержащее ЭВМ, контроллер управления приводами ведомых рядов гибких стенок сопла, приводы управления гибкими стенками сопла, датчики обратной связи, а также командное устройство, отличающееся тем, что командное устройство содержит цифровой блок определения конечного положения ведущего ряда гибких стенок сопла в функции заданного числа М, вход которого подключен к ЭВМ, а выход подключен к входу цифрового блока задания интенсивности движения ведущего ряда, определяющему заданное значение ординаты ведущего ряда на каждый такт управления, выход блока задания интенсивности подключен к входу цифрового блока задания ординат всех ведомых рядов в функции заданной ординаты ведущего ряда, а выход последнего подключен к контроллеру управления приводами ведомых рядов гибких стенок сопла.
| Устройство для управления гибкими стенками сопла аэродинамической трубы | 1976 |
|
SU587448A1 |
| СВЕРХЗВУКОВОЕ РЕГУЛИРУЕМОЕ СОПЛО АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 0 |
|
SU280944A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ СИСТЕМЫ ЗАЩИТЫ ГИБКОЙ СТЕНКИ РЕГУЛИРУЕМОГО СОПЛА АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 1974 |
|
RU487570C |
| Сверхзвуковая аэродинамическая камера для учебных целей | 1979 |
|
SU875444A1 |
| Рабочая часть трансзвуковой аэродинамической трубы с адаптивными стенками | 1990 |
|
SU1779970A1 |

