Изобретение касается систем управления в экспериментальной аэродинамике, в част- ности, к аэродинамическим трубам с регулируемыми соплами.
При применении регулируемых сопл зна чительную трудность представляет уточнение их контуров при испытаниях в потоке для получения заданных чисел М и требуемой равномерности рабочего потока, так как теоретические расчеты позволяют определять контуры лишь приближенно. В случае, когда контур создаётся с помощью нескольких приводных рядов, наладка становится особенно сложной, длительной и в мощных аэродинамических трубах ведет к большим непроиэводительным затратам воздуха высокого давления.
Известны системы регулирования с устройствами, вводящими коррекцию в прямую цепь управления J lJНаиболее близким по технической сути к изобретению является устройство для управления гибкими стенками сопла аэродинамической трубы, содержащее гидроцилиндры, связанные с выходами электрогидргавличес-
ких преобразователей, управляющие обмотки которых лодключены к соответствующим сельсинам-приемникам, соединенным черва дифференциальные сельсины с сельсинамидатчиками, кинематически связанными с кулачками узла задания .
Однако это устройство имеет ручной ввод поправки контура сопла при его довооке, осуществляемый путем поворота статЛров сельсинов-датчиков, что усложняет наладку сопла и снижает его точность.
Цель изобретения - повышение точности устройства достигается тем, что в устройстве для управления гибкими стенками регулируемого сопла аэродинамической трубы установлен блок коррекции контура гибких стенок сопла и подключенный к его выходу шаговый двигатель, кинематически связанный с дифференциалыш1м сельсином.
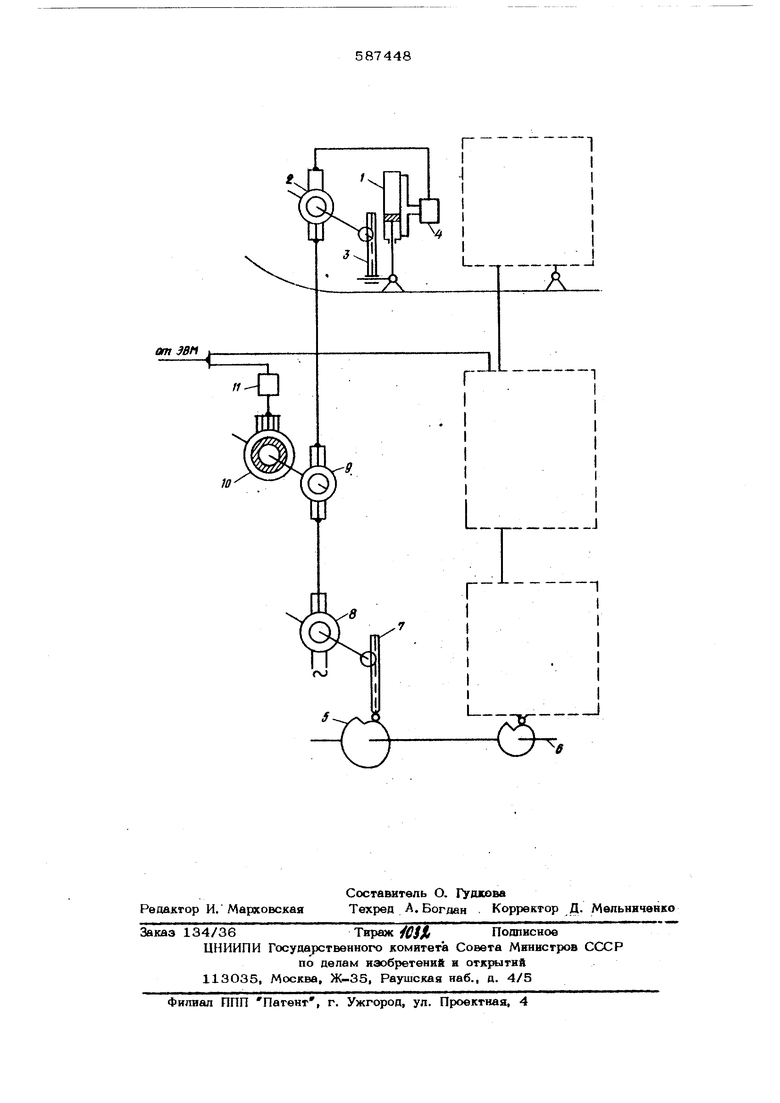
На чертеже схематически изображено устройство для управления гибкими стенкФми сопла аэродинамической трубы.
Устройство содержит гидроцилиндры 1, соединенные с гибкими стенками сопла и сельсинами-приемниками 2 с помощью
измерительных реек 3, число которых рав но количеству приводных рядов сопла. Выходы сельсинов-приемников 2 соединетл с управляющими обмотками электрогиДравп ческих преобразователей 4. Узел задания образуют кулачки 5, расположенные на о№ном валике 6 и связанные через рейки-толп катели 7 с сельсинами-датчиками 8. Узел коррекции включает дифференциальные сель сины 9 и шаговые двигатели 10, установленные на общем валу и соединенные с блоком коррекции 11 гибких стенок сопла. Дифференциальные сельсины включены между сельсинами-датчиками и приемниками.
Устройство работает следующим образом, При повороте валика 6 перемещаются рейки-толкатели 7, сельсины-датчики 8 поворачиваются каждый на определенный угол в зависимости от крофиля кулачка 5. Одновременно для изменевйя заданного Kyiлйчками контура сопла вводятся поправки от блока 11 (например, вычислительной машины ЭВМ .в виде определенного числа импульсов, поступаюших на шаговые двигатели 10. Шаговые двигатели 10 поворачивают дифференциальные сельсины 9 каждый на угол, соответствующий величине поправки положения данного приводного ряда.
Напряжение на выходных обмотках сельсинов-приемников 2 будет пропорционально разности углов поворота приемников-датчико и дифференциальных сельсинов. Это напряже ние подается на электрогндравлические преобразователи 4, управляющие потоком жидкости, поступающей в полости гидроцнлиндров 1, которые перемещают гибкие стенки сопла. Перемещение будет происходить до тех пор, пока углы повороте свяьсниЬв-врием НИКОВ не станут равны суммам углов датчиков и дифференциальных сельсинов. При этом контур сопла, заданный с помощью кулачков, будетскорректирован на величину поправок, заложенньтх в виде программы в ЭВМ.
Формула изобрете
н и я
Устройство для управления гибкими стенками сопла аэродинамической трубы, соде1 жащее гидроцилиндры, связанные с выходами электрогидравлических преобразователей, управлякицие обмотки которых подключены к соответствукшим сельсинам-приемникам, соединенным через дифференциальные сел1 сины с сельсинами-датчиками, кинематически связанными q .кулачками узла задания, о т л и ч а ю щ. е е с я тем, что, с целью повышения т лмностй устройства, в нем установлен блок Коррекций контура гибких стенок сопла и подключенный к его выходу шаговый двигатель, кинематически связанный с Д фференциальным сельсином.
Источники информации, принятые во внимание при экспертизе:
1, Боднер В. А. Теория автоматического управления полетом. М., Наука, 1964, с. 2ОО.
2. Авторское свидетельство СССР №280944, кл.(401 М 9/00, 1969.
в
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИБКИМИ СТЕНКАМИ СОПЛА АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 2012 |
|
RU2506556C1 |
| УСТРОЙСТВО ДЛЯ СОГЛАСОВАНИЯ ПРИВОДНЫХ РЯДОВ ГИБКИХ СТЕНОК СОПЛА АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 2012 |
|
RU2506555C1 |
| Пресс для гибки заготовок с растяжением | 1982 |
|
SU1107927A1 |
| Машина для изготовления асбестоцементных труб | 1973 |
|
SU470402A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU302444A1 |
| Устройство для управления шаговым режимом работы конвейера | 1981 |
|
SU956382A1 |
| Устройство для управления положением гидравлических нажимных механизмов | 1980 |
|
SU882673A1 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
| СПОСОБ УПРАВЛЕНИЯ ГИБКИМИ СТЕНКАМИ СОПЛА АЭРОДИНАМИЧЕСКОЙ ТРУБЫ | 2012 |
|
RU2506554C1 |
| УСТАНОВКА ДЛЯ ПРОВЕРКИ УСТРОЙСТВ ДАВЛЕНИЕ - ПУТЬ | 1995 |
|
RU2108216C1 |