Изобретение относится к нефтяной и газовой промышленности, коммунальному хозяйству и другим областям науки и техники, использующим подземные металлические трубопроводы. В частности настоящее изобретение связано с бесконтактной диагностикой целостности металлических труб в процессе эксплуатации.
Металлические трубопроводы, уложенные в грунт, подвергаются воздействию различных физических и химических факторов. Нарушения изоляции, давление грунта, влияние блуждающих токов, значительные перепады температур и внутреннего давления ведут к существенному сокращению их срока службы. Коррозия металла труб является одной из основных причин их разгерметизации и техногенных катастроф на трубопроводах. За счет неоднородности металла трубы и гетерогенности грунта (по физическим свойствам и химическому составу) возникают участки с различным электронным потенциалом, что обуславливает образование гальванических коррозионных элементов.
Коррозионная ситуация, в которой находится металлический трубопровод в грунте, зависит от многих обстоятельств, связанных с грунтовыми и климатическими условиями, особенностями трассы, условиями эксплуатации. Наиболее сильное отрицательное влияние на электрокоррозионное разрушение трубопроводов оказывают блуждающие токи в земле, вызываемые электрифицированным рельсовым транспортом постоянного тока. Из практики известно, что величина блуждающих токов может достигать 400 А, а вызванная ими коррозия - до 10 мм в год.
Методы защиты подземных металлических трубопроводов от коррозии подразделяются на пассивные и активные.
Пассивный метод защиты от коррозии предполагает создание непроницаемого барьера между металлом трубопровода и окружающим его грунтом. Это достигается нанесением на трубу специальных защитных покрытий: битума, каменноугольного пеке, полимеров, эпоксидных смол и т.д..
Однако на практике не удается добиться необходимой целостности изоляционного покрытия. Различные его виды имеют разную диффузионную проницаемость, а в процессе строительства и эксплуатации в нем возникают трещины, задиры, вмятины и другие дефекты. Наиболее опасными являются сквозные повреждения защитного покрытия, где и наблюдается грунтовая коррозия.
Поскольку пассивные методы не обеспечивают абсолютную защиту трубопровода, одновременно обычно применяют активную защиту, связанную с управлением электрохимическими процессами, протекающими на границе металла трубы и грунтового электролита. Активный метод защиты от коррозии осуществляется путем катодной поляризации и основан на снижении скорости растворения металла по мере смещения его потенциала коррозии в область более отрицательных значений.
Катодную защиту трубопроводов осуществляют двумя способами: гальваническим - с использованием жертвенных анодов-протекторов, и электрическим - с применением внешних источников постоянного тока, минус которых соединяется с трубой, а плюс - с анодным заземлением.
Применение катодной защиты с помощью протекторов эффективно только в низкоомных грунтах (до 50 Ом/м) и ограничено по срокам эксплуатации. Катодная защита внешними источниками мало зависит от удельного сопротивления грунта, но более сложна, трудоемка и требует больших затрат энергии. К тому же защитный ток, прикладываемый к трубе и создающий разность потенциалов "труба-земля", распределяется неравномерно по длине трубопровода. По мере удаления от точки подключения эффективность защиты уменьшается. Чрезмерное завышение разности потенциалов отрицательно влияет на адгезию покрытия и может вызвать структурные изменения металла трубы и привести к ее растрескиванию. К тому же при высокой плотности коммуникаций, находящихся под катодной защитой, процессы коррозии могут усиливаться в некоторых из них из-за перераспределения потенциалов.
Таким образом, и пассивный, и активный способы защиты имеют ряд ограничений и не обеспечивают полной безопасности трубопроводов. Поэтому необходимо регулярно проводить мониторинг целостности труб в процессе эксплуатации.
Известны дефектоскопы для внутреннего обследования труб (например: патент РФ №2102652; US 6,917,176; US 7,154,264; WO 2007/130723). Однако их использование на многих участках трубопровода ограничено необходимостью монтажа специальных камер приема-запуска, конструктивными особенностями трубопровода (наличием изгибов, соединением труб различного диаметра и т.п.). Кроме того, на время обследования необходимо вводить ограничения в режим эксплуатации трубопровода. Поэтому на практике на магистральных участках такие измерения проводятся раз в два-три года, а значительные коррозионные повреждения, вызванные блуждающими токами, могут образовываться за более короткое время.
Широкое распространение получили методы мониторинга трубопроводов, основанные на электрических измерениях. В патенте РФ №2244297 описан способ обнаружения коррозионных повреждений по оценке удельного сопротивления металла трубы. На исследуемом участке откапывают шурфы и проводят контактное измерение электрического сопротивления и параметров труб. В целом этот способ отличается высокими трудозатратами, низкой результативностью и эффективностью предсказаний. Кроме того, он имеет существенные ограничения по размерам обследуемого участка.
Другой способ определения местоположения и площади дефектов изоляционного покрытия и глубины коррозионных повреждений наружных поверхностей подземных и подводных трубопроводов (патент РФ №2 319 139) основан на измерении поляризационного потенциала после снятия поляризации. Этот метод также отличается невысокой диагностической точностью и требует изменения режима эксплуатации трубопровода при обследовании.
В настоящее время наиболее часто используется методика определения опасных в эксплуатации участков трубопровода по наличию блуждающих токов («Типовая инструкция по защите трубопроводов тепловых сетей от наружной коррозии» №РД 153-34.0-20.518-2003 от 29 ноября 2002 г.). Однако, она дает только косвенную информацию о наличии угрожающего фактора, но не указывает точного месторасположения и характер дефекта. Для точной диагностики необходимы значительные земляные работы по вскрытию опасных участков и визуальному или иному контактному обследованию труб.
Бесконтактные способы поиска дефектов основываются на измерение компонент магнитного поля вокруг трубопровода. Известен метод обследования трубопровода (US 4,430,613), связанный с перемещением магнитометра вдоль оси трубопровода и выявлении мест с отклонением магнитных характеристик. Однако таким способом можно определять только значительные неоднородности в идеальных условиях. Природные неоднородности магнитного поля Земли, разная глубина залегания труб, высокая плотность коммуникаций и т.д. ограничивают возможности практического применения этого способа.
Для повышения точности измерений определяют тензор напряженности магнитного поля (патент РФ №2264617), направление и характер его изменения, соотношение компонент (патент РФ №2246742; патент РФ 2062394; патент РФ №2 155 943; патенты РФ на ПМ №11608, №88453). Наличие дефектов в трубе и их размеры определяют по отклонению от фонового значения. Однако, фоновое значение может изменяться вдоль линии трубопровода как в зависимости от характера и состояния грунтов, так и от глубины залегания и технических особенностей трубы. Дополнительную погрешность в измерения вносит наличие посторонних металлических объектов рядом с трубопроводом.
Ограниченность описанных выше способов магнитометрии обусловлена низким уровнем изменения искомого сигнала и большим количеством трудно учитываемых артефактов, вносящих искажение в измерения. Это приводит к относительно невысокой точности локализации опасных участков, низкой достоверности оценки уровня ущерба (величины коррозии) и сложности в интерпретации результатов, связанных с учетом свойств грунта, погодных условий и т.п.
Настоящее изобретение направлено на измерение изменений напряженности магнитного поля, вызванных наличием блуждающих токов и локализации мест их стекания на грунт. По величине изменений определяют характер и степень угрозы дефектов для трубопровода.
Этот способ: во-первых, позволяет локализовать непосредственно опасное место и, во-вторых, определить характер этой опасности - провести оценочный расчет величины коррозии.
Целью настоящего изобретения является разработка способа и создание технических средств для определения участков трубопровода с максимальным изменением величины блуждающего тока, появляющегося на трубе, локализация и оценка величины вызываемых им коррозионных повреждений.
Технический результат заключается в упрощении способа поиска мест коррозии на трубопроводе с одновременным повышением точности локализации повреждений и оценки их масштаба.
Заявленный технический результат достигается тем, что способ дистанционной магнитометрии для определения местонахождения и величины коррозийного поражения подземных металлических трубопроводов блуждающими токами включает следующие шаги:
- определение места и глубины залегания трубопровода на исследуемом участке;
- установка вдоль оси трубопровода, по крайней мере, двух идентичных датчиков для измерения напряженности (тангенциальной составляющей) магнитного поля;
- синхронная запись изменения напряженности магнитного поля, вызванного блуждающими токами;
- сравнительная обработка информации от всех датчиков;
- диагностическое заключение.
Диагностическое заключение может содержать как информацию об опасном участке с наибольшим изменением величины напряженности магнитного поля, вызванного блуждающим током, так и оценку степени представляемой опасности.
Расстояния между датчиками выбираются в зависимости от конкретной задачи, исходных данных и условий на трассе. Обычно это расстояние лежит в пределах от 1 до 10000 метров. Отклонение места установки датчика от вертикали, проходящей через ось трубопровода, обычно не превышает 10% от глубины залегания трубы.
Количество используемых датчиков зависит от поставленных задач. Если известно местоположение повреждения изоляции и нужно оценить степень опасности этого повреждения блуждающими токами, то бывает достаточно двух датчиков. Их обычно располагают над трубопроводом на расстоянии 10-20 метров друг от друга до и после повреждения.
Если состояние изоляционного покрытия неизвестно и границы участка трубопровода, подверженного влиянию блуждающих токов не определены, то в этом случае используют максимально возможное количество датчиков. Датчики устанавливаются над трубопроводом на участке в несколько километров в обе стороны от возможного источника блуждающих токов. На практике в роли такого источника блуждающего тока обычно выступает железная дорога, а длина обследуемых участков может достигать 20 км.
В каждой точке, где установлены датчики, определяется расстояние от датчика до трубопровода. Автоматически в режиме реального времени или после завершения процесса измерения определяется направление и рассчитывают значения блуждающего тока. Путем сравнения полученных результатов определяется участок между двумя соседними датчиками, где произошло максимальное стекание блуждающего тока с трубопровода. При наличии информации о величине повреждения изоляции, проводится оценочный расчет потерь металла и делается вывод о степени опасности повреждения изоляции. При отсутствии данных о величине повреждения изоляции выбирается участок между соседними датчиками, где произошло максимальное стекание блуждающего тока. Измерения повторяют еще несколько раз (обычно 2-3 раза) до момента, когда протяженность выбранного участка будет соизмерима с длиной возможного шурфа.
Для эффективного осуществления способа предпочтительно получить предварительную информацию о времени возникновения блуждающих токов (ознакомиться с графиком движения электропоездов, режимом работы соседних промышленных предприятий и т.п.).
Заявленный способ предпочтительно осуществлять с помощью устройства
дистанционной магнитометрии для диагностики трубопроводов, которое содержит: по крайней мере, два идентичных датчика, определяющих напряженность магнитного поля (ее тангенциальную составляющую), средство синхронизации включения и работы датчиков, средство записи и обработки данных. Предпочтительно, чтобы устройство содержало не менее трех идентичных датчиков. Дополнительно заявляемое устройство может включать средство для привязки на местности (GPS или Глонасс-навигатор) и средство определения глубины залегания трубопровода. В качестве такого устройства может быть использован механический щуп, сонар и т.д. Устройство обычно включает средство коммуникации, обеспечивающие синхронизацию работы датчиков, при их установке на расстоянии от 1 до 10000 метров друг от друга. Датчики после установки управляются с единого пульта, информация с них поступает в реальном времени. Сигналы могут передаваться по проводам или по каналам радиосвязи. При другом исполнении устройства каждый из датчиков включает средство синхронизации включения и средство записи данных. В этом случае каждый из датчиков программируется и осуществляет включение, измерения, запись данных независимо в автоматическом режиме. А после завершения измерений вся информация с них переписывается в аналитический блок. Под средством здесь везде понимается функциональная часть устройства. Так, например, средство синхронизации включения и работы датчиков может быть выполнено в виде одного блока или в виде нескольких блоков, каждый из которых конструктивно включен в автономный прибор - датчик. Устройство может быть выполнено и как комбинация этих двух вариантов, когда сигнал о включение записи и управление работой датчиков осуществляют с единого пульта через средство коммуникации, а датчики выполнены с возможностью отложенной записи. Перенос информации в аналитический блок и ее обработку осуществляют после завершения измерений. Предпочтительно, чтобы устройство так же дополнительно содержало средство автоматического расчета значения блуждающего тока в каждой точке на измеряемом участке трубопровода. Конкретная схема исполнения устройства дистанционной магнитометрии для диагностики трубопроводов зависит от стоящих задач. При обследовании небольшого участка трубопровода (не более 40 метров) предпочтительно использовать многоканальный прибор, управляющий работой всех датчиков. Для исследования участков большой протяженности предпочтительно использовать автономные датчики с функцией отложенной записи и накопления данных.
Сущность настоящего изобретения поясняется следующими чертежами:
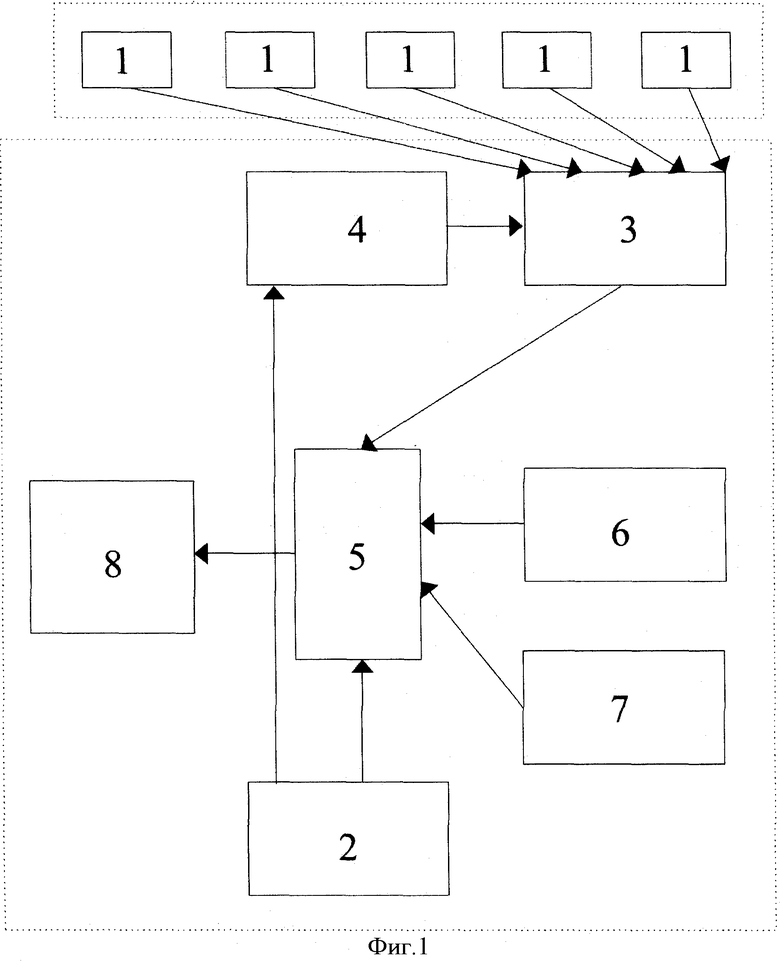
На Фиг.1 представлена блок-схема заявляемого устройства, с единым пультом управления датчиками и поступлением информации в режиме реального времени;
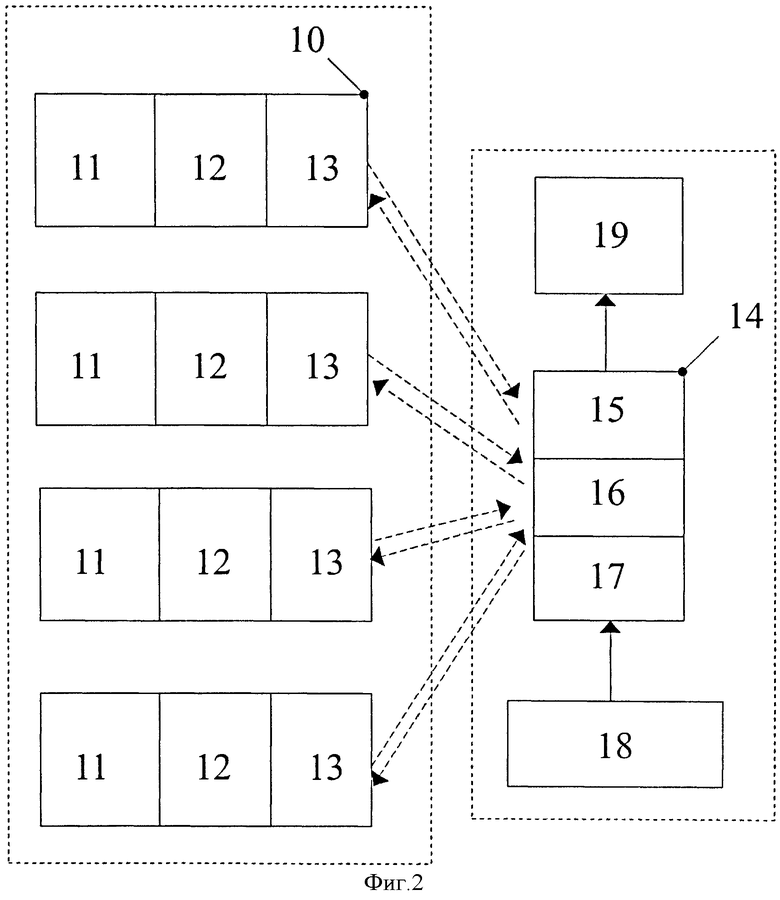
На Фиг.2 представлена блок-схема радиоуправляемого устройства;
На Фиг.3 представлена блок-схема заявляемого устройства, с автономными датчиками;
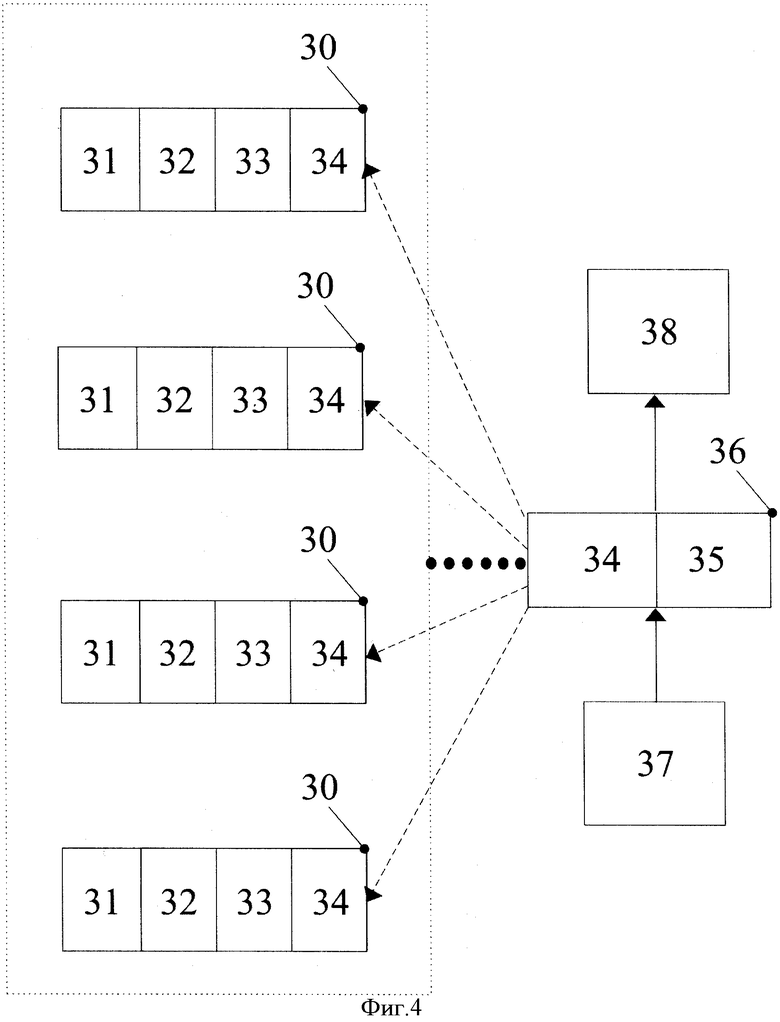
На Фиг.4 представлена блок-схема заявляемого устройства, с комбинированным управлением данными;
На Фиг.5 изображена схема проведения полевых измерений при локализации места повреждения трубопровода;
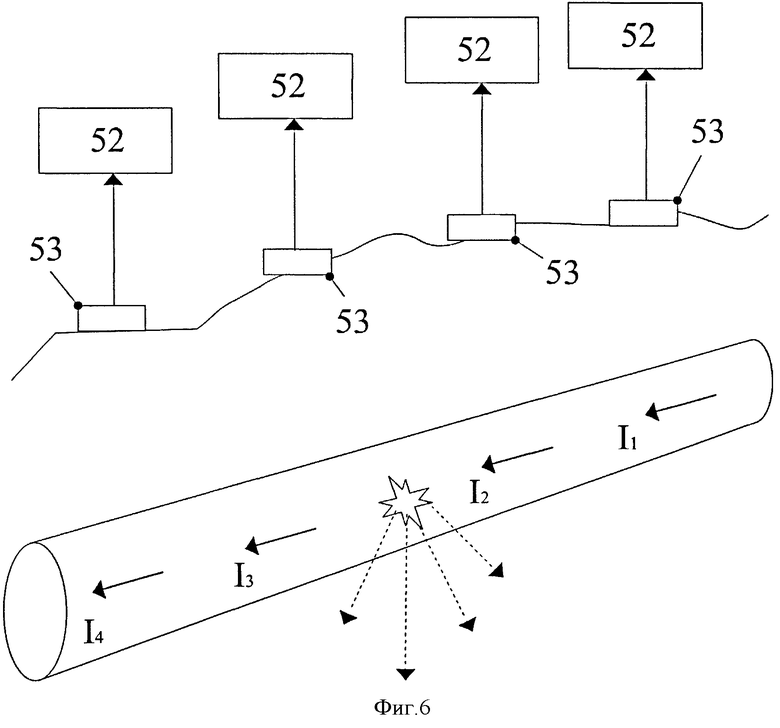
На Фиг.6 изображена схема проведения полевых измерений при отсутствии информации о месте повреждения трубопровода;
На Фиг.7(а), (б), (в) приведены фотографии коррозионных повреждений, обнаруженных с помощью заявляемого способа;
На Фиг.8(а), (б), (в) приведены фотографии коррозионных повреждений, обнаруженных с помощью заявляемого способа
Устройство дистанционной магнитометрии для диагностики трубопроводов может иметь разное конструктивное исполнение. На Фиг.1 представлена блок-схема заявляемого устройства, с единым пультом управления датчиками и поступлением информации в режиме реального времени. Датчики 1 напряженности магнитного поля устанавливаются на выбранном участке трубопровода, как это было описано выше. Управление работой датчиков осуществляют с блока 2 управления. Данные с датчиков поступают в режиме реального времени в блок 3 накопления и хранения информации. Управление потоками данных осуществляют посредством сигналов с блока 4 синхронизации отсчета времени. Вся полученная информация передается в блок 5 анализа данных. Туда же поступает информация с блока 6 привязки к координатам на местности и блока 7 измерения глубины залегания трубопровода. Конструктивно указанные блоки 6 и 7 могут быть выполнены в виде отдельных приборов или входить в состав каждого из датчиков 1. Обработка полученных данных производится в блоке 5 по специальному алгоритму. Полученные результаты передаются на монитор 8 или любое другое устройство для визуализации данных. В качестве результатов получают информацию: о пространственном распределении изменения магнитного поля на выбранном участке, об изменении величины блуждающего тока, о координате места стекания блуждающего тока, о величине коррозии в этом месте и т.д. Коммуникацию между блоками осуществляют по проводам. Направления управляющих сигналов и потоков данных на Фиг.1 представлены стрелками.
Коммуникацию между устройствами можно также осуществлять посредством радиосигналов (Фиг.2). Тогда каждый датчик 10 выполняют в виде отдельного прибора содержащего непосредственно датчик 11 магнитного поля, блок 12 привязки к координатам на местности и блок 13 измерения глубины залегания трубопровода. Остальные функциональные блоки конструктивно включены в отдельный прибор 14, которым управляет оператор. Прибор 14 включает блок 15 анализа данных, блок 16 синхронизации, блок 17 накопления и хранения информации, также есть блок 18 управления и блок 19 визуализации данных.
Блок-схема другого варианта исполнения заявляемого устройства представлена на Фиг.3. В этом случае каждый датчик 20 выполнен в виде автономного прибора, включающего несколько функциональных блоков: непосредственно датчик 21 измерения напряженности магнитного поля; блок 22 синхронизации включения/выключения; блок 23 привязки к координатам на местности; блок 24 измерения глубины залегания трубопровода и блок 25 накопления и хранения информации. Каждый из датчиков 20 устанавливают в выбранном месте и программируют на включение в определенный момент времени. Обычно все данные записывают на флэш-карту, которая в последующем может быть использована в блоке 16 анализа данных. Полученный результат передают на монитор 27.
Устройство может иметь и комбинированную схему коммуникации между функциональными блоками и управлением потоками данных (Фиг.4). Каждый датчик 30 включает следующие функциональные блоки: непосредственно датчик 31 измерения напряженности магнитного поля; блок 32 привязки к координатам на местности; блок 33 измерения глубины залегания трубопровода и блок 34 накопления и хранения информации. Управление работой датчиков 30 осуществляют с отдельного устройства 34, включающего блок 35 синхронизации, блок 36 анализа данных, блок 37 управления и блок 38 визуализации. Полученные на датчике 30 данные могут быть затем перенесены в блок 34 посредством любого электронного носителя. Коммуникация между функциональными блоками осуществляется посредством проводов или радиосигналов.
Исходя из многолетней практики применения магнитометров различных типов для измерения блуждающих токов, как на полигоне, так и на действующих магистральных трубопроводах, были разработаны техническими требования для датчиков измерения напряженности магнитного поля. Предпочтительно, чтобы это были трехкоординатные датчики с диапазон измерений по каждой из трех координат +/- 200 МкТл и разрешающей способностью не менее 0,02 МкТл. Они могут управляться в ручном или автоматическом режиме (режим отложенной записи); иметь программируемое время включение от 10 до 90 мин и время записи от 1 до 120 мин.
Примеры реализации заявленного изобретения.
Пример 1.
Было известно, что на одном из участков действующего трубопровода имело место повреждение изоляции протяженностью 5 метров. Необходимо было степень опасности коррозии под действием блуждающих токов для дальнейшей эксплуатации. Для решения этой задачи достаточно двух датчиков, однако, для повышения надежности измерений на практике использовали четыре датчика (Фиг.5). Два датчика 41 были расположены на расстоянии 10 и 20 метров до повреждения, два датчика 42 - на расстоянии 10 и 20 метров после повреждения. В местах расположения каждого датчика определялись расстояния от датчика до оси (или верхней образующей) трубопровода 43. Измерения начинались одновременно, запись показаний всех четырех датчиков происходила синхронно. Управление работой датчиков, запись, обработка данных и последующая визуализация осуществлялась посредством прибора 44. Полученные данные представляют собой зависимость изменения напряженности магнитного поля во времени для четырех координат. По известным алгоритмам производят расчет направления и величины блуждающего тока и делают вывод о степени опасности повреждения изоляции. Если известна площадь повреждения, то проводится оценочный расчет потерь металла.
Пример 2.
При необходимости обследовать неизвестный участок трубопровода обычно используют большее количество датчиков (Фиг.6). Количество датчиков и расстояние между ними зависит от длины участка и стоящих диагностических задач.
Посредством GPS-навигатора, трассоискателя и щупа уточняют местоположение и глубины залегания трубопровода 51 на выбранном участке.
Над осью трубопровода устанавливают регистрирующие приборы 52. Конструктивно устройство может быть выполнено по схеме представленной на Фиг.2 Отклонение положения датчиков 53 измерения напряженности магнитного поля от оси трубопровода зависит от диаметра трубы и глубины ее залегания, но не должно превышать 10% от глубины.
Приборы программируют на время отложенной записи, с учетом времени, необходимого для установки их в выбранных точках.
После окончания записи данные переносят в блок обработки, анализа и хранения информации (на Фигуре не показан). По результатам измерений определяют участок между соседними приборами, на котором произошло максимальное изменение блуждающего тока. Измерения повторяют еще несколько раз (обычно 2-3 раза) до момента, когда протяженность выбранного участка будет соизмерима с длиной возможного шурфа. Окончательное заключение по дефектам трубопровода и рекомендации по их устранению дают после визуального осмотра раскопанного участка трубы (шурфа).
Пример 3.
Возникла задача исследовать магистральный трубопровод пересекает электрифицированная железная дорога на постоянном токе. Изоляция трубопровода -пленочная. Диаметр трубопровода Ду 400 мм, толщина стенки 8 мм. Границы участка, подверженного влиянию блуждающих токов, не определены. На станции дренажной защиты фиксировались токи до 200 Ампер. Других данных не предоставлено. Требовалось найти точку (участок трубопровода протяженностью не более 5 метров) максимального стекания блуждающего тока.
Для проведения работ применялось пять одноканальных приборов.
На первом этапе приборы были установлены на участке трубопровода длиной 15 км. Режимы работы приборов: время отложенной записи - 1,5 часа; период записи - 1 сек., время записи - 2 часа. Координаты точек установки приборов, глубина заложения трубопровода в точках измерения сведены в Таблицу 1.
Вычисленные значения максимальных токов для каждого прибора следующие:
Из таблицы видно, что максимальное изменение токов наблюдалось между приборами №1 и №2, поэтому для второго этапа был выбран участок между точками установки этих приборов. Координаты точек установки приборов, глубина заложения трубопровода в точках измерения сведены в Таблицу 3.
Вычисленные значения максимальных токов для каждого прибора следующие:
Из таблицы видно, что максимальное изменение токов наблюдалось между приборами №3 и №4, поэтому для третьего этапа был выбран участок между точками установки этих приборов. Координаты точек установки приборов, глубина заложения трубопровода в точках измерения сведены в Таблицу 5.
Вычисленные значения максимальных токов для каждого прибора следующие:
Из таблицы видно, что максимальное изменение токов наблюдалось между приборами №1 и №2, поэтому для четвертого этапа был выбран участок между точками установки этих приборов. Координаты точек установки приборов, глубина заложения трубопровода в точках измерения сведены в Таблицу 7.
Вычисленные значения максимальных токов для каждого прибора следующие:
На последнем, пятом этапе, приборы были установлены с шагом 5 метров на участке 450 м до ж/д - 480 м до ж/д.
Вычисленные значения максимальных токов для каждого прибора следующие:
Из последней таблицы очевидны координаты контрольного шурфа: начало шурфа 475 метров до ж/д, конец шурфа 470 метров до ж/д.
При обследовании изоляционного покрытия и состояния металла в контрольном шурфе было обнаружено:
- Изоляционное покрытие нарушено вследствие «затяжки» тросом при строительстве при укладке трубопровода в траншею (Фиг.7(a));
- На срезе грунта в непосредственной близости (до 15 см) от трубы в месте повреждения изоляции видны характерные прожилки ржавого цвета - линии стекания блуждающего тока (Фиг.7(б));
- После удаления поврежденной изоляции была обнаружена коррозия (Фиг.7(в)) с признаками электрокоррозии (малая площадь дефекта, блестящий металл внутри, значительная глубина дефекта 3,2 мм (более 30% толщины стенки). Специалисты лаборатории по неразрушающему контролю признали данный дефект недопустимым, было принято решение о ремонте дефекта.
Пример 4.
Магистральный трубопровод пересекает электрифицированная железная дорога на постоянном токе. Изоляция трубопровода - битумная. Диаметр трубопровода Ду 800 мм, толщина стенки 8-10 мм. Протяженность участка, подлежащего обследованию, 350 метров. Других данных не предоставлено. Требовалось найти точки наиболее опасные с точки зрения коррозии блуждающими токами. Протяженность шурфов не должна превышать 5 метров.
Для проведения работ применялся многоканальный прибор с пятью датчиками (Фиг.1). Участок трубопровода был размечен колышками через 5 метров, в каждой точке была определена глубина заложения. Датчики устанавливались по следующей схеме:
этап 1 - датчик №1 - 0 м, №2 -5 м, №3 - 10 м, №4 - 15 м, №5 - 20 м;
этап 2 - датчик №1 - 20 м, №2 - 25 м, №3 - 30 м, №4 - 35 м, №5 - 40 м;
этап 3 - датчик №1 - 40 м, №2 - 45 м, №3 - 50 м, №4 - 55 м, №5 - 60 м; и так далее до конца участка.
Затем повторили измерения в обратном направлении с тем же шагом установки датчиков, но со сдвигом в 2,5 метра.
Выбирая участки с максимальным стеканием блуждающего тока, определили координаты шурфов: первый участок - 70-75 метров; второй участок - 132-137 метров; третий участок - 165-170 метров; четвертый участок - 182,5-190 метров. Результаты обследования трубопровода в шурфах:
Шурф№1.
Состояние изоляции - удовлетворительное, площадь повреждения - 5 кв. см, каверны до 0,5 мм (Фиг.8(а));
Шурф №2.
Состояние изоляции - удовлетворительное, площадь повреждения - 17 кв. см, каверны до 0,3 мм;
Шурф №3
Состояние изоляции - удовлетворительное, площадь повреждения - 24,4 кв. см, язвенная коррозия глубиной до 3,2 мм (Фиг.8(б));
Шурф №4.
Состояние изоляции - удовлетворительное, площадь повреждений -2,8 кв. см, язвенная коррозия глубиной до 2,8 мм; 3 кв. см, язвенная коррозия глубиной до 1,5 мм; 30 кв. см, язвенная коррозия глубиной до 1 мм; 100 кв. см, язвенная коррозия глубиной до 1,7 мм (Фиг.8(в)).
Во всех четырех шурфах присутствовали признаки электрокоррозии. Специалисты лаборатории по неразрушающему контролю признали дефекты в шурфах №3 и №4 недопустимыми, было принято решение о ремонте (вырезка участка трубы).
Пример 5.
Для отработки методики оценки величины блуждающего тока были поставлены модельные эксперименты на действующем трубопроводе Ду 400 мм в пленочной изоляции, который пересекал железную дорогу. В 500 метрах от места пересечения с железной дорогой над осью трубопровода установили датчик магнитометра. Ось Y датчика сориентировали тангенциально оси трубопровода. Глубина залегания трубопровода в этом месте составляла 1,9 метра. В автоматическом режиме провели запись показаний датчика в течение 1,5 часов с периодом записи 1 с.Пиковые изменения магнитного поля имели величину от 3 до 24 мкТл и длительность от 5 до 80 сек. Все изменения магнитного поля были вызваны лишь протекающими по трубопроводу блуждающими токами. Для оценки значений магнитной индукции исходили из положения одинаковости плотности тока по сечению трубопровода. Тогда B=µ0I/2πR, где µ0 - магнитная постоянная материала, I - протекающий ток, R - расстояние от проводника до точки измерения. Все измерения проводились в постоянном магнитном поле Земли, деформированном металлом трубопровода, поэтому можно говорить лишь об относительных измерениях. Измерения выполняются при неподвижном расположении датчика при изменении тока, протекающего по трубопроводу. В этом случае, определив максимальное и минимальное значения индукции магнитного поля за выбранный интервал времени, можно определить величину тока в данной точке трубопровода: I=5×R×(B1-B2), где В1 - максимальное значение индукции магнитного поля (в мкТл); В2 - минимальное значение индукции магнитного поля (в мкТл). В Табл.11 приведены данные испытаний, усредненный интервал времени выбирался 10 сек.
Максимальная величина блуждающего тока достигала 156 А. Кроме того, по известной ориентации датчика относительно трубопровода, определялось направление блуждающего тока (анодный или катодный). Для обработки, хранения результатов и проведения расчетов обычно служат переносные компьютеры с установленным на них соответствующим программным обеспечением. Могут быть также использованы автономные вычислительные устройства.
Пример 6.
На основании настоящего изобретения спроектированы и изготовлены полевые магнитометры для работы на участках трубопроводов с блуждающими токами:
- одноканальный с одним трехкоординатным датчиком (для синхронных измерений на расстояниях между точками измерений свыше 20 метров);
- многоканальный с количеством трехкоординатных датчиков до 5 (для синхронных измерений на расстояниях между точками измерений менее 20 метров).
Приборы имеют следующие характеристики:
максимальное число файлов - 32;
период записи - от 1 до 60 с;
время записи - от 1 до 90 минут;
время отложенной записи (время, достаточное для установки приборов в выбранных точках над трубопроводом до начала записи) - от 10 до 120 минут;
питание - 6 элементов типа АА;
ток потребления одним датчиком в режиме записи - 40 мА;
допустимая температура окружающей среды от -15 до +40°C.
Основные характеристики датчиков:
количество координат - 3;
диапазон измерений ±200 МкТл;
разрешающая способность не меньше 0,05 мкТл;
погрешность измерения 0,01%.
Настоящее изобретение не ограничивается только приведенными примерами и включает в себя все возможные случаи реализации устройства дистанционной магнитометрии для диагностики трубопроводов и способы его применения.
Пример 7
Один из алгоритмов расчета значений блуждающего тока основан на изветном факте, что индукция магнитного поля, создаваемого прямолинейным бесконечным проводником с током, убывает обратно пропорционально расстоянию от проводника (см., например, Евграфова Н.Н., Каган В.Л. Курс физики. Учебное пособие для подготовительных отделений вузов. М.: Высшая школа, 1973 - стр.284). В=µ0I/2πR, где µ0 - магнитная постоянная, I - сила тока, R - расстояние от проводника до точки измерения.
При прохождении через трубопровод блуждающего тока происходит резкое изменение напряженности магнитного поля. Амплитуда, длительность и форма такого изменения существенно отличается от любых флуктуации естественного фона. Как уже отмечалось в описании к изобретению, величина блуждающих токов может достигать 400А, и изменение магнитного поля при этом будет на несколько порядков превышать величину индукции естественного поля Земли. В этом случае, определив максимальное и минимальное значение за время наблюдения индукции магнитного поля, можно определить величину тока, из-за протекания которого индукция магнитного поля изменилась от значения B1 до значения В2. I=2πR*(В1-В2)/µ0, где B1 - максимальное значение индукции магнитного поля, В2 - минимальное значение индукции магнитного поля. Если измерять индукцию магнитного поля в микротеслах, расстояние в метрах, то получим ток в амперах:
I=2πR*(B1-B2)/µ0=2πR*(B1-B2)10-6/4π*10-7=1/2R*(B1-B2)×10=5*R*(B1-B2)
Для практических измерений магнитная проницаемость среды (грунта и воздуха) µ=1, поэтому можно говорить об измерении напряженности магнитного поля. Тогда, фиксируя значения напряженности магнитного поля, можно определить его изменение за время наблюдения, а, зная расстояние до проводника (в нашем случае - до оси трубопровода), можно рассчитать величину протекающего тока.
Для проведения работ были спроектированы и изготовлены пять одинаковых магнитометров с функцией отложенной записи и синхронного запуска и один пятиканальный магнитометр. Датчики магниторезистивные трехкоординатные HMR 2300 производства фирмы Honeywell (США): режимы - ручной, автоматический, отложенной записи; период записи - от 1 до 60 сек; отложенная запись - от 11 до 90 мин; время записи от 1 до 120 мин; количество файлов - до 32.
Ниже приведены результаты работы многоканального магнитометра с одновременным подключением пяти датчиков при проведении полевых испытаний.
На участке с блуждающими токами было выбрано пять точек над осью трубопровода для размещения датчиков с шагом пять метров. Все датчики установили однонаправлено, при этом ось Y каждого датчика расположили по касательной к окружности, лежащей в плоскости, перпендикулярной оси трубопровода, с центром на оси трубопровода. Координаты привязки датчиков относительно нулевой точки обследуемого участка были выбраны следующими: датчик №1 - 0 м, датчик №2 - 5 м, датчик №3 - 10 м, датчик №4 - 15 м, датчик №5 - 20 м.
До начала измерений была определена глубина залегания трубы на исследуемом участке. Запись показаний всех датчиков в память магнитометра происходила в автоматическом режиме. Исходя из опыта и предварительных исследований интенсивности блуждающих токов, был установлен следующие параметры измерений: время записи - 20 мин, период записи усредненного сигнала -1 сек.
Полученные данные обрабатывались посредством программных средств Microsoft Excel, по вышеприведенным формулам. На графике изменения напряженности от времени были выбраны интервалы максимального изменения напряженности. По опыту полевых и стендовых испытаний установлено, что достаточно выбрать 10-20 временных промежутков, чтобы сделать вывод о стекании блуждающего тока. Среднее значение блуждающего тока на каждом из датчиков составило: датчик №1 - 7,21 А, датчик №2 - 7,04 А, датчик №3 - 6,99 А, датчик №4 - 6,72 А, датчик №5 - 7,47 А. Наибольшие изменения значений тока произошло на участке между датчиками №3 и №5 (7,47 - 6,99=0,75А), что вызвано стеканием блуждающего тока с трубопровода.
На этом участке были проведены повторные измерения со смещением их положения на 2,5 м. Их координаты относительно точки привязки стали: датчик №1 - 2,5 м; №2 - 7,5 м; №3 - 12,5 м; №4 - 17,5 м; №5 - 22,5 м. На этот раз максимальное стекание обнаружили между датчиками датчиками №4 и №5. Было принято решение провести контрольное шурфования с длинной траншеи 7,5 м. В результате обследования металла трубопровода в шурфе была найдена коррозионное поражение размерами недопустимыми для дальнейшей эксплуатации трубопровода. Принято решение о замене этого участка трубопровода.
Настоящее изобретение не ограничивается только приведенными примерами и включает в себя все возможные случаи реализации устройства дистанционной магнитометрии для диагностики трубопроводов и способы его применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения степени защищенности подземных магистральных трубопроводов | 1981 |
|
SU998584A1 |
| Устройство и способ внутритрубной диагностики технического состояния трубопровода | 2019 |
|
RU2722636C1 |
| Способ комплексного наземного бесконтактного технического диагностирования подземного трубопровода | 2015 |
|
RU2614414C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШЕНИЙ ИЗОЛЯЦИОННОГО ПОКРЫТИЯ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2003 |
|
RU2263333C2 |
| СПОСОБ ВЫЯВЛЕНИЯ УЧАСТКОВ ТРУБОПРОВОДОВ, ПРЕДРАСПОЛОЖЕННЫХ К ВНУТРЕННЕЙ КОРРОЗИИ | 2008 |
|
RU2360230C1 |
| УСТРОЙСТВО ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697007C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОТСЛАИВАНИЙ ПОКРЫТИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2008 |
|
RU2472060C2 |
| СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2633018C2 |
| Способ обнаружения дефектов трубопроводов и устройство для его осуществления | 2023 |
|
RU2822335C1 |







Изобретение относится к бесконтактной диагностике металлических труб в процессе эксплуатации. Сущность: способ включает определение места и глубины залегания трубопровода на исследуемом участке, установку вдоль оси трубопровода, по крайней мере, двух идентичных датчиков для измерения напряженности (тангенциальной составляющей) магнитного поля, синхронную запись изменения напряженности магнитного поля, вызванного блуждающими токами, сравнительную обработку информации от всех датчиков и диагностическое заключение. Устройство содержит, по крайней мере, два идентичных датчика для установки вдоль оси трубопровода, определяющих напряженность магнитного поля, средство для привязки на местности, средство определения глубины залегания трубопровода, средство синхронизации включения и работы датчиков, средство записи изменения напряженности магнитного поля, вызванного блуждающими токами, и обработки данных. Технический результат: упрощение поиска мест коррозии на трубопроводе, повышение точности локализации повреждений. 2 н. и 10 з.п. ф-лы, 8 ил., 11 табл.
1. Устройство дистанционной магнитометрии для диагностики трубопроводов, содержащее, по крайней мере, два идентичных датчика для установки вдоль оси трубопровода, определяющих напряженность магнитного поля, средство для привязки на местности, средство определения глубины залегания трубопровода, средство синхронизации включения и работы датчиков, средство записи изменения напряженности магнитного поля, вызванного блуждающими токами, и обработки данных.
2. Устройство по п.1, отличающееся тем, что содержит не менее трех датчиков.
3. Устройство по п.1, отличающееся тем, что включает средство коммуникации, обеспечивающее синхронизацию работы датчиков, при установке датчиков на расстоянии от 1 до 10000 м друг от друга.
4. Устройство по п.1, отличающееся тем, что каждый из датчиков содержит блок синхронизации включения и блок записи данных.
5. Устройство по п.1, отличающееся тем, что дополнительно содержит средство автоматического расчета значения блуждающего тока в каждой точке на измеряемом участке трубопровода.
6. Способ дистанционной магнитометрии для диагностики трубопроводов, включающий следующие шаги:
определение места и глубины залегания трубопровода на исследуемом участке;
установка вдоль оси трубопровода, по крайней мере, двух идентичных датчиков для измерения напряженности магнитного поля;
синхронная запись изменения напряженности магнитного поля, вызванного блуждающими токами; сравнительная обработка информации от всех датчиков; диагностическое заключение.
7. Способ по п.6, отличающийся тем, что устанавливают не менее трех идентичных датчиков и диагностическое заключение содержит выбор участка между двумя датчиками с наибольшим изменением величины напряженности магнитного поля, вызванного блуждающим током.
8. Способ по п.6, отличающийся тем, что отклонение места установки датчика от вертикали, проходящей через ось трубопровода, не превышает 10% от глубины залегания трубы.
9. Способ по п.6, отличающийся тем, что датчики устанавливаются на расстоянии от 1 до 10000 м друг от друга вдоль оси трубопровода.
10. Способ по п.6, отличающийся тем, что на участке с наибольшим изменением величины магнитного поля, вызванного блуждающими токами, проводятся повторные измерения с меньшими расстояниями между датчиками.
11. Способ по п.10, отличающийся тем, что повторные измерения проводятся до тех пор, пока расстояние между датчиками не будет меньше длины стандартного шурфа.
12. Способ по п.6, отличающийся тем, что дополнительно определяется время появления максимальных блуждающих токов.
| Способ контроля распределенияТОКА B пОдзЕМНОМ ТРубОпРОВОдЕ | 1976 |
|
SU815643A1 |
| СПОСОБ КОНТРОЛЯ И ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ТРУБОПРОВОДАХ ИЗ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2294482C1 |
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2008 |
|
RU2382270C1 |
| СПОСОБ БЕСКОНТАКТНОГО ВЫЯВЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ХАРАКТЕРА ДЕФЕКТОВ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2264617C2 |
| RU 2009148562 А1, 27.06.2011 | |||
| US 7421908 В2, 09.09.2008. | |||

