ОБЛАСТЬ ТЕХНИКИ
Группа изобретений относится к способу и устройству контроля состояния металлических трубопроводов с поверхности грунта над трубопроводом.
УРОВЕНЬ ТЕХНИКИ
Проблема поиска дефектов трубопроводов заключается в том, что существующие методы и технические средства не всегда эффективны и недостаточно точны. Необходимо заблаговременно обнаружить дефекты магистральных и локальных трубопроводов, так как их износ может вызывать серьезные аварии и приводить к утечкам или потере транспортируемых жидкостей или газа.
Износ и дефекты магистральных и локальных трубопроводов могут вызывать серьезные аварии и приводить к утечкам или потере транспортируемых жидкостей или газа.
Однако, проведение визуального осмотра или контактной диагностики требует значительных затрат времени и ресурсов. Кроме того, некоторые дефекты могут быть недоступны для прямого наблюдения или контроля, что осложняет их обнаружение. Поэтому необходимо разработать более эффективные и точные технические средства, позволяющие проводить предварительную диагностику состояния металла и поиск врезок в трубопроводы с минимальными затратами времени и ресурсов.
При поиске дефектов в трубопроводах широко применяется метод внутритрубной диагностики. Этот метод позволяет обнаружить и оценить различные виды дефектов, такие как коррозия, трещины, износ и другие повреждения.
Один из распространенных методов внутритрубной диагностики - это метод магнитной дефектоскопии, основанный на измерении магнитных полей внутри трубопровода. Для этого в трубопровод вводится специальный дефектоскопический снаряд, оборудованный датчиками для измерения магнитных полей. Датчики сканируют поверхность внутри трубопровода, регистрируя изменения магнитных полей, вызванные дефектами.
Другим методом внутритрубной диагностики является использование технологии ультразвуковой дефектоскопии. В этом случае в трубопровод вводится ультразвуковой зонд, который излучает импульсы ультразвука, проникающие в материал трубопровода. Отраженные от дефектов импульсы ультразвука регистрируются и обрабатываются с помощью специальной аппаратуры. Это позволяет обнаружить и оценить размеры и характер дефектов, таких как трещины, деформации и прочие повреждения.
Известно устройство для обнаружения несанкционированного отбора продуктов транспортировки из трубопровода, состоящее из внутритрубного снаряда с датчиками и электронными блоками [Патент РФ №2191322, МПК F16D 5/00].
Необходимо учитывать следующие недостатки использования внутритрубной диагностики для поиска дефектов в трубопроводах:
Во-первых, одним из основных недостатков является сложность доступа к трубам для проведения диагностики. Чтобы осуществить внутритрубную диагностику, необходимо иметь доступ внутрь трубопровода путем ввода специального оборудования через ревизионные отверстия или посредством разборки трубопровода. В некоторых случаях это может быть непрактичным и дорогостоящим процессом.
Во-вторых, существуют технические ограничения относительно длины и диаметра трубопровода, когда можно использовать внутритрубную диагностику. Например, для трубопроводов большого диаметра может потребоваться специальное оборудование с большим размером и массой, что может затруднить его введение внутрь трубы. Также, для очень длинных трубопроводов могут понадобиться дополнительные устройства для передачи сигнала диагностического оборудования на большие расстояния.
Третьим недостатком внутритрубной диагностики является ограниченная возможность проведения диагностики в режиме реального времени. В некоторых случаях может потребоваться остановка работы трубопровода или специальная подготовка для ввода и эксплуатации диагностического оборудования, что может увеличить время и затраты.
В-четвертых, необходимо отметить дороговизну и сложность данного вида диагностики.
В целом, хотя внутритрубная диагностика является наиболее часто применяемом методом для поиска дефектов в нефте-газотрубопроводах, необходимо учитывать основные недостатки, чтобы обеспечить более точную и надежную диагностику.
Магнитометрический метод контроля дефектов трубопроводов основан на измерении магнитного поля с поверхности грунта над самим трубопроводом. Данный метод позволяет обнаруживать и локализовать различные дефекты, такие как коррозия, трещины или врезки, без необходимости разрушать поверхность трубопровода и широко используется в инженерно-технических обследованиях эксплуатационного состояния трубопроводных систем.
Принцип метода заключается в том, что дефекты или иные аномалии в трубопроводе создают изменение магнитного поля вокруг себя. Специальные магнетометры, размещенные над поверхностью земли или грунта, регистрируют эти изменения и предоставляют информацию о местоположении и характере дефектов.
Одним из преимуществ магнитометрического метода является его высокая чувствительность к дефектам в трубопроводах. Он способен обнаружить даже небольшие дефекты, которые могут привести к ухудшению функциональности или безопасности системы. Кроме того, метод позволяет проводить контроль на больших участках трубопровода за короткое время, что сокращает затраты на обследование и повышает эффективность процесса.
Однако, метод магнитометрического контроля также имеет определенные недостатки и ограничения.
Во-первых, он требует специализированного оборудования и специально обученного персонала для правильного проведения измерений и интерпретации полученных результатов. Неправильная интерпретация данных может привести к неточным результатам или пропуску дефектных участков.
Во-вторых, магнитометрический метод имеет ограниченную применяемость из-за большого числа неподтвержденных дефектов среди выявленных аномалий. Данные результаты могут быть вызваны колебаниями магнитометрической антенны относительно оси трубопровода и по высоте, это наиболее сложноустранимая проблема, т.к. приборы переносятся оператором, и каждый шаг оператора вызывает колебания антенны. Поэтому, при проведении контроля, следует учитывать возможность наличия среди выявленных аномалий ложных, и применять дополнительные методы диагностики для подтверждения результатов.
Несмотря на некоторые ограничения, магнитометрический метод контроля дефектов трубопроводов является эффективным инструментом для обнаружения и локализации проблемных участков. Правильное проведение контроля и сочетание его с другими методами диагностики позволяет обеспечить надежное и точное определение состояния трубопроводных систем.
Известен способ контроля и обнаружения дефектов на трубопроводах из ферромагнитных материалов, в котором измеряют величину модуля магнитной индукции и\или градиент величины модуля магнитной индукции, строят график, и выделяют области, где величина модуля магнитной индукции превышает в два раза величину среднеквадратичного отклонения модуля магнитной индукции [Патент РФ №2294482, МПК F17D 5/02].
Недостатки данного способа заключаются в невозможности идентифицировать ложные пики измеренных значений, сложности определения места дефекта на местности, отсутствии контроля состояния изоляции.
Одним из эффективных дополнительных методов диагностики может являться метод контроля состояния изоляции с помощью датчиков разности потенциалов и наведенного внешним генератором напряжения между трубопроводом и грунтом, т.к. основной причиной дефектов трубопроводов в виде внешней коррозии, является нарушение сплошности изоляционного покрытия. При возникновении сквозных дефектов металла трубопровода также возникает нарушение изоляционного покрытия.
Для определения контактными методами разности потенциалов на поверхности грунта, создаваемого источником тока, используются специальные датчики. Эти датчики имеют встроенные электроды, которые устанавливаются на поверхность грунта вдоль трубопровода. При включении источника тока, на поверхности грунта вдоль трубопровода создается разность потенциалов. Датчики контактным путем измеряют напряжение, возникающее между двумя электродами на поверхности грунта. Это напряжение связано с напряжением между трубопроводом и землей, и протекающим по земле током, и может быть использовано для определения наличия дефектов изоляции трубопровода. При нарушении изоляции трубопровода, когда происходит контакт металла трубопровода с окружающей землей, возникают электрический ток между трубопроводом и землей и на поверхности грунта возникает разность потенциалов, которая может указывать на наличие дефектов изоляции.
Эти датчики обладают высокой чувствительностью и точностью при измерении разности потенциалов на поверхности грунта.
Однако, следует отметить, что применение данных датчиков имеет ряд ограничений. Например, выявленные дефекты изоляции не всегда сопровождаются серьёзными дефектами металла трубопровода. Кроме того, для проведения контактного измерения необходимо обеспечить достаточный доступ к поверхности грунта над трубопроводом, что может быть сложно в некоторых условиях, например, при наличии плотной растительности или неровной местности.
В целом, датчики контактного измерения разности потенциалов на поверхности грунта, создаваемого источником тока, представляют собой эффективный инструмент для определения дефектов и повреждений изоляционных покрытий трубопроводов. Однако, перед использованием таких датчиков, необходимо тщательно исследовать и оценить условия и ограничения их применения для достижения наиболее точных результатов.
Для определения бесконтактными методами разности потенциалов над трубопроводом, создаваемого генератором тока, в основном используются два типа датчиков: емкостные и электромагнитные.
Емкостный датчик состоит из двух электродов – рабочего и контрольного, разделенных диэлектрическим материалом. Когда ток проходит через рабочий электрод и затем через грунт, возникает электрическое поле между датчиком и поверхностью грунта. При этом, электроды образуют конденсатор, емкость которого зависит от свойств грунта, таких как влажность, состав, плотность и прочие параметры.
Изменение разности потенциалов на поверхности грунта, вызванное изменением емкости датчика, может быть измерено и интерпретировано для определения наличия дефектов изоляции.
Преимущество использования емкостных датчиков заключается в их способности бесконтактного измерения разности потенциалов на поверхности грунта. Это позволяет избежать проблем, связанных с физическим контактом с грунтом. Кроме того, емкостные датчики обладают достаточно высокой чувствительностью и точностью измерений, что делает их эффективным инструментом для определения разности потенциалов и дефектов изоляции с поверхности грунта над трубопроводом.
Одним из способов обнаружения дефектов изоляции является измерение тока утечки, возникающего в месте нарушения изоляции. Ток утечки определяют, измеряя величину тока, протекающего по трубопроводу, и фиксируя величину уменьшения тока, в месте утечки. Разница величины измеренного тока до утечки и после равна току утечки. Координаты точки изменения тока, определяют место дефекта изоляции.
Известен способ обнаружения дефектов трубопровода и врезок в трубопровод, заключающийся в проведении измерения магнитной индукции над трубопроводом с одновременным перемещением датчика вдоль трубопровода, определение дефектного участка. Измеряют только вертикальную составляющую вектора магнитной индукции, отслеживая более чем 10% изменения вертикальной составляющей вектора магнитной индукции, являющиеся критерием возможного дефекта трубопровода [Патент РФ №2379579, МПК F17D 5/02].
Недостатками данного способа является то, что величина вектора магнитной индукции в существенной мере зависит от угла поворота датчика в пространстве, создавая множество ложных характерных признаков дефекта. Кроме этого к недостаткам относится отсутствие записи измеренных значений и координат, что усложняет обработку результатов измерений.
Известно устройство, используемое в способе для обнаружения дефектов трубопровода и врезок в трубопровод, содержащее корпус с электронным блоком, при этом электронный блок содержит антенну с вертикально расположенным феррозондовым датчиком на карданной подвеске. [Патент РФ №2379579, МПК F17D 5/02].
Недостатками данного устройства является то, что:
- величина вектора магнитной индукции в существенной мере зависит от угла поворота датчика в пространстве, создавая множество ложных характерных для дефекта признаков;
- необходимо выдерживать вертикальное положение антенны над осью трубопровода, для того, чтобы устранить помехи, вызванные резким изменением величины магнитной индукции при незначительных отклонениях датчика от оси;
- отсутствуют признаки отклонения прибора от оси трубопровода.
Наиболее близким к предлагаемому способу по технической сущности и достигаемому эффекту является способ обнаружения дефектов трубопровода и врезок в трубопровод, включающий непрерывное измерение составляющей магнитной индукции над трубопроводом и вдоль него, и выявление участка трубопровода с дефектом, определение градиента модуля вектора магнитной индукции с получением магнитограммы, с последующей записью считываемой магнитограммы на внешнюю память, при этом наличие участка трубопровода с дефектом или врезкой определяют по плавному возрастанию или убыванию магнитограммы в зависимости от величины и направленности магнитного поля, а запись магнитограммы во внешнюю память производят в соответствии с изменением координат, получаемых от встроенного модуля GPS-ГЛОНАСС, производят непрерывное измерение трехкомпонентной магнитометрической антенной трех ортогональных проекций градиента постоянного магнитного поля, с последующим вычислением среднеквадратического значения, соответствующего, скаляру объемного градиента магнитной индукции над обследуемым трубопроводом и вдоль него, одновременно производят измерение трехкомпонентной электрометрической антенной трех ортогональных проекций градиентов переменного магнитного поля от подключенного к трубопроводу генератора известной частоты и (или) сигнала промышленной частоты от электрохимической защиты трубопровода с последующим вычислением, скаляра переменного магнитного поля над тем же участком трубопровода, полученные скалярные значения постоянного и переменного градиентов магнитной индукции записываются во внешнюю память и используются для формирования магнитограммы постоянного магнитного поля и переменного магнитного поля, и по совокупности признаков, выделяемых на магнитограмме выявляются места, содержащие дефекты. [Патент РФ №2742631, МПК F17D 5/00].
Недостатками данного метода является то, что:
- расположение попарно датчиков постоянного магнитного поля в разных точках пространства, не на одной оси, и определение градиента в каждой паре датчиков не позволяет определить единый градиент постоянного магнитного поля, и полученная на основании данных градиентов скалярная величина, является неким числом, зависящим от поворота платформы в пространстве, что создает дополнительные искажения сигнала, при колебании платформы;
- расположение попарно датчиков переменного магнитного поля в разных точках пространства, не на одной оси, и определение градиента в каждой паре датчиков не позволяет определить единый градиент переменного магнитного поля, и полученная на основании данных градиентов скалярная величина, является неким числом, зависящим от поворота платформы в пространстве, что создает дополнительные искажения сигнала, при колебании платформы;
- расположение попарно датчиков переменного магнитного поля в разных точках пространства и определение градиента в каждой паре датчиков усложняет определение места прохождения трубопровода, и приводит к ошибкам при определении места прохождения трубопровода;
- расположение попарно датчиков переменного магнитного поля в разных точках пространства и определение градиента в каждой паре датчиков усложняет определение места прохождения трубопровода, и приводит к ошибкам при определении тока в трубопроводе.
Задачей заявленной группы изобретений является разработка способа и устройства определения места дефекта металла и изоляции металлических трубопроводов с поверхности грунта над трубопроводом. Техническим результатом заявленной группы изобретений является повышение точности и достоверности определения места дефекта металла металлических трубопроводов с поверхности грунта над трубопроводом, устранение количества ложных признаков дефекта, сокращение времени поиска дефектов, существенное снижение стоимости работ, снижение габаритов оборудования и снижение его стоимости.
Указанный технический результат достигается за счет того, что используется способ обнаружения дефектов трубопроводов, ответвлений и врезок в трубопровод, включающий следующие этапы:
а) подключение генератора переменного тока к трубопроводу и создание напряжения между трубопроводом и грунтом;
б) непрерывное измерение магнитометрической антенной градиента постоянного магнитного поля, состоящей, как минимум, из двух блоков датчиков постоянного магнитного поля, над трубопроводом, путем перемещения антенны вдоль трубопровода;
в) одновременно производят измерение величины переменного электромагнитного поля на поверхности грунта над трубопроводом с помощью электромагнитных датчиков, синхронизированных по времени и месту измерения с результатами измерения значений градиента постоянного магнитного поля над трубопроводом и рассчитывают отклонение прибора от оси трубопровода и величину тока, наводимого в трубопроводе генератором;
г) одновременно производят измерение разности потенциалов на поверхности грунта над трубопроводом с помощью датчиков, синхронизированных по времени и месту измерения с результатами измерения значений магнитной индукции над трубопроводом;
д) определение координат измерений встроенным модулем определения координат;
е) отображение результатов измеренных значений на индикаторе, и их запись - во встроенную память;
ж) определение дефектов трубопровода по величине изменения градиента постоянного магнитного поля, рассчитанного с учетом величины отклонения датчика от оси трубопровода, рассчитанного по величине переменного электромагнитного поля, величине наводимого в трубопроводе тока и величине разности потенциалов над трубопроводом; при этом наличие участка трубопровода с дефектом или врезкой определяют по плавному возрастанию или убыванию измеренной величины градиентов магнитного поля в зависимости от величины и направленности магнитного поля, учитывая поправку на изменение положения магнитометрической антенны по соотношению градиентов магнитного поля, учитывая поправку на величину отклонения от оси трубопровода, измеренной по величине электромагнитного поля, а так же учитывая величину изменения тока более чем на 10%, наведенного генератором в трубопроводе, и учитывая величину разности потенциалов над трубопроводом по плавному возрастанию или убыванию измеренной величины; результаты измерений используют для формирования графиков измеренных значений, и по совокупности признаков, выделяемых на графике, выявляются места, содержащие дефекты металла трубопровода, дефекты изоляции трубопровода или врезки.
Для осуществления способа обнаружения дефектов трубопроводов используется устройство обнаружения дефектов трубопроводов, ответвлений и врезок в трубопровод, состоящее из приемника, содержащего корпус, с размещенными в нем блоками датчиков постоянного магнитного поля, состоящих как минимум из двух блоков датчиков постоянного магнитного поля и размещенными в корпусе датчиками переменного электромагнитного поля, приемника GPS\Глонасс отличающееся тем, что оси датчиков в блоках датчиков постоянного магнитного поля параллельны, а центры датчиков находятся на одной оси, и каждый блок датчиков постоянного магнитного поля содержит, как минимум, один датчик, так же содержит группу электромагнитных датчиков, которая состоит, как минимум, из трех взаимоортогональных датчиков, центры которых находятся на одной оси, параллельной оси, на которой расположены датчики постоянного магнитного поля, а плоскость размещения одного из электромагнитных датчиков перпендикулярна линии, соединяющей центры блоков датчиков постоянного магнитного поля, так же содержит датчики измерения величины разности потенциалов над металлическим трубопроводом, при этом датчики приемника соединены с блоком обработки аналогового сигнала, с блоками предусилителей, которые в свою очередь соединены с аналого-цифровыми преобразователями, соединенными с микропроцессором, с которым, в свою очередь, соединены блок памяти, блок управления и индикатор, содержит блок питания, питающий все элементы приемника.
Устройство, отличающееся тем, что содержит три блока датчиков постоянного магнитного поля, расположенных на одной оси.
Устройство, отличающееся тем, что содержит четыре блока датчиков постоянного магнитного поля, расположенных на одной оси.
Устройство, отличающееся тем, что блоки датчиков постоянного магнитного поля содержат по два взаимоортогональных датчика, и оси датчиков в каждом блоке датчиков постоянного магнитного поля параллельны осям датчиков в остальных блоках, а центры всех датчиков находятся на одной оси.
Устройство, отличающееся тем, что блоки датчиков постоянного магнитного поля содержат по три взаимоортогональных датчика, и оси датчиков в каждом блоке датчиков постоянного магнитного поля параллельны осям датчиков в остальных блоках, а центры всех датчиков находятся на одной оси.
Устройство, отличающееся тем, что содержит дополнительно четвертый электромагнитный датчик переменного электромагнитного поля, центр которого расположен на оси, проходящей через центры трех электромагнитных датчиков и параллельной оси, на которой расположены блоки датчиков постоянного магнитного поля, а ось четвертого электромагнитного датчика параллельна оси электромагнитного датчика, расположенного в плоскости перпендикулярной линии, соединяющей центры блоков датчиков постоянного магнитного поля и центры параллельных электромагнитных датчиков разнесены.
Устройство, отличающееся тем, что в качестве датчиков разности потенциалов над трубопроводом используют контактные датчики.
Устройство, отличающееся тем, что в качестве датчиков разности потенциалов над трубопроводом используют емкостные датчики.
Устройство, отличающееся тем, что в качестве датчиков постоянного магнитного поля используют индукционные датчики.
Устройство, отличающееся тем, что в качестве датчиков постоянного магнитного поля используют феррозондовые датчики.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет более понятным из описания, не имеющего ограничительного характера и приводимого со ссылками на прилагаемые чертежи, на которых изображено:
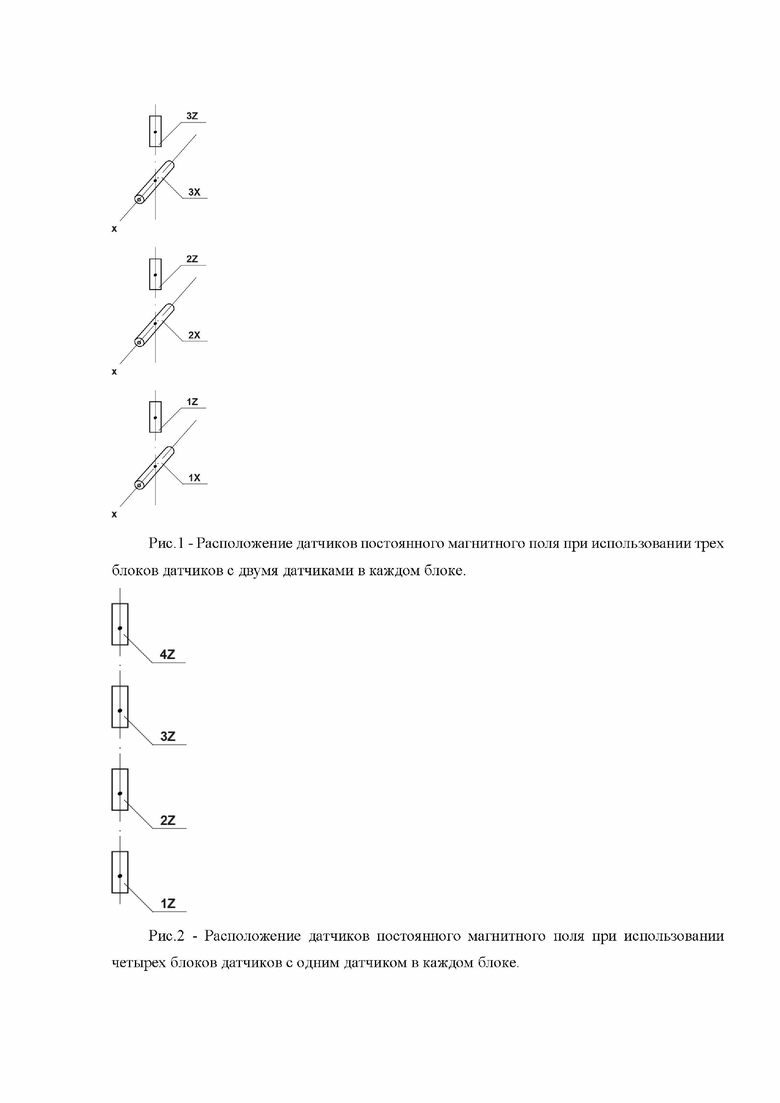
Рис. 1 - Расположение датчиков постоянного магнитного поля при использовании трех блоков датчиков с двумя датчиками в каждом блоке.
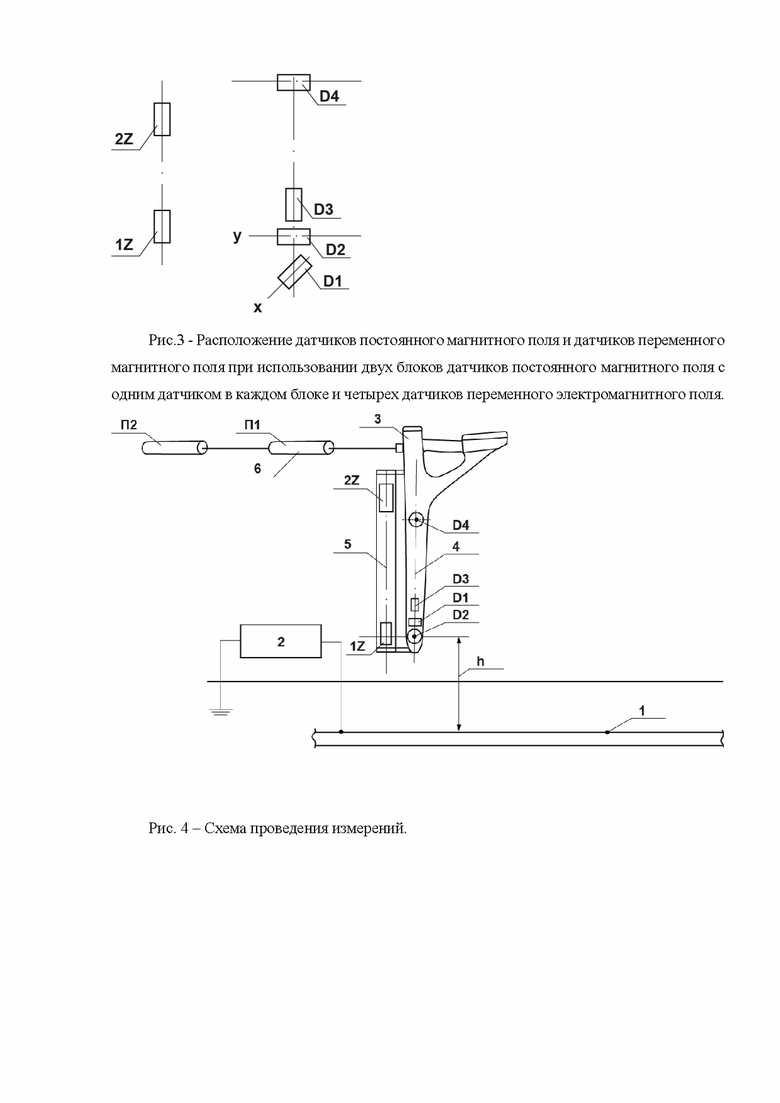
Рис. 2 - Расположение датчиков постоянного магнитного поля при использовании четырех блоков датчиков с одним датчиком в каждом блоке.
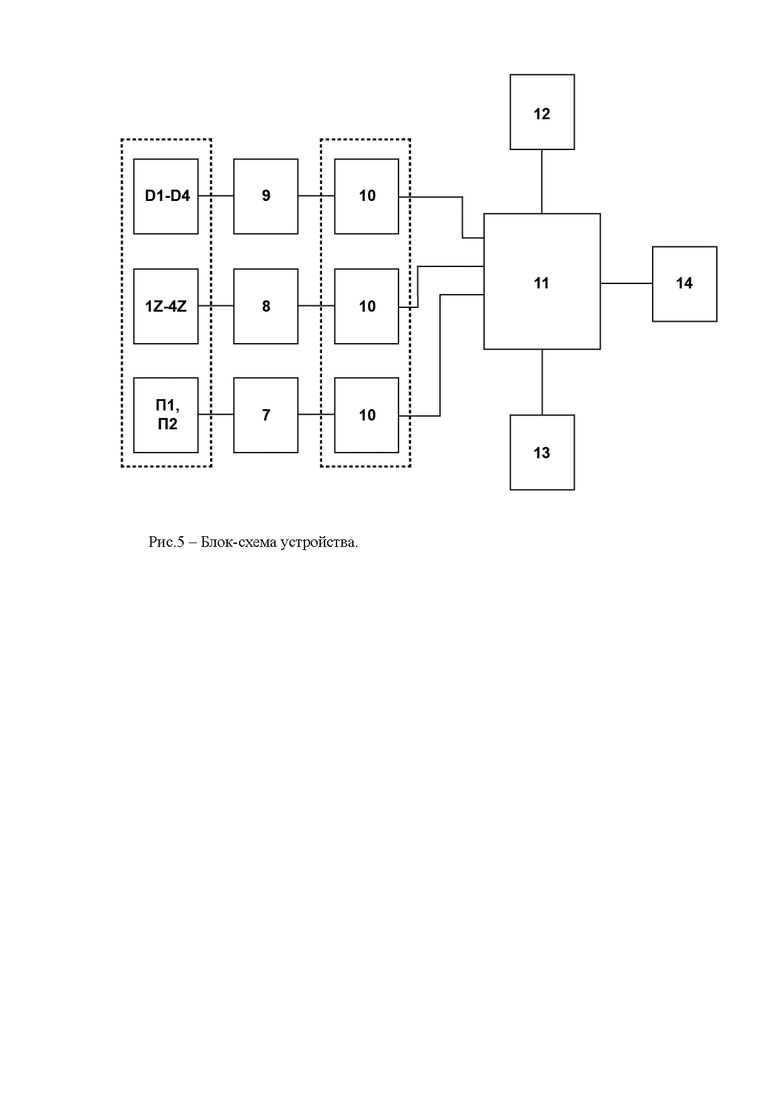
Рис. 3 - Расположение датчиков постоянного магнитного поля и датчиков переменного магнитного поля при использовании двух блоков датчиков постоянного магнитного поля с одним датчикам в каждом блоке и четырех датчиков переменного электромагнитного поля.
Рис. 4 - Схема проведения измерений.
Рис. 5 - Блок-схема устройства.
На рисунках цифрами и буквами обозначены следующие элементы:
1 - коммуникация;
2 - генератор электрического тока;
3 - устройство поиска коммуникаций и диагностики состояния металла;
4 - ось датчиков переменного электромагнитного поля;
5 - ось датчиков постоянного магнитного поля;
6 - датчики разности потенциалов;
7 - согласующее устройство датчиков разности потенциалов;
8 - блок обработки аналогового сигнала датчиков постоянного магнитного поля;
9 - блок предусилителей;
10 - АЦП;
11 - микропроцессор;
12 - блок памяти;
13 - индикатор;
14 - блок управления
Д1-Д4 - датчики переменного электромагнитного поля;
1Х-3Х, 1Z-4Z - датчики постоянного магнитного поля;
П1, П2 - датчики разности потенциалов.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Устройство обнаружения дефектов трубопроводов, ответвлений и врезок в трубопровод, состоящее из приемника, содержащего корпус, с размещенными в нем блоками датчиков постоянного магнитного поля, состоящих как минимум из двух блоков датчиков постоянного магнитного поля и размещенными в корпусе датчиками переменного электромагнитного поля, приемника GPS\Глонасс, отличающееся тем, что оси датчиков в блоках датчиков постоянного магнитного поля параллельны, а центры датчиков находятся на одной оси и каждый блок датчиков постоянного магнитного поля содержит, как минимум, один датчик, так же содержит группу электромагнитных датчиков, которая состоит, как минимум, из трех взаимоортогональных датчиков, центры которых находятся на одной оси, параллельной оси, на которой расположены датчики постоянного магнитного поля, а плоскость размещения одного из электромагнитных датчиков перпендикулярна линии, соединяющей центры блоков датчиков постоянного магнитного поля, так же содержит датчики измерения величины разности потенциалов над металлическим трубопроводом, при этом датчики приемника соединены с блоком обработки аналогового сигнала, с блоками предусилителей, которые в свою очередь соединены с аналого-цифровыми преобразователями, а они соединенными с микропроцессором, с которым, в свою очередь, соединены блок памяти, блок управления и индикатор, содержит блок питания, питающий все элементы приемника.
Размещение оси, на которой размещены блоки датчиков постоянного магнитного поля и оси, на которой размещены электромагнитные датчики, параллельно и на фиксированном расстоянии, позволяет контролировать нахождение оси, на которой размещены блоки датчиков постоянного магнитного поля, над осью трубопровода, т.к. отклонения от оси трубопровода приводят к потере полезного сигнала и вызывают ложные скачки величины измеренного градиента постоянного магнитного поля, что, в свою очередь, приводит к неправильным выводам при анализе наличия дефектов трубопровода.
Необходимость использовать три электромагнитных датчика переменного электромагнитного поля вызвана потребностью в определении не только зоны нахождения над трубопроводом, но и направления отклонения от трубопровода. Причем, для упрощения расчетов, один из электромагнитных датчиков должен располагаться в плоскости, перпендикулярной линии, соединяющей центры блоков магнитных датчиков, а ось второго датчика, ортогональна осям двух других электромагнитных датчиков и параллельна линии, соединяющей центры блоков магнитных датчиков. Это позволяет рассчитать место прохождения трубопровода и установить прибор над его осью.
Синхронное измерение разности потенциалов над трубопроводом дает возможность получить информацию о дефектах изоляции трубопровода, что позволяет повысить достоверность определения места дефекта металла трубопровода, т.к. основные дефекты вызваны наружной коррозией металла в местах нарушения изоляции.
Использование в устройстве четвертого электромагнитного датчика, центр которого расположен на оси, проходящей через центры трех электромагнитных датчиков и параллельной оси, на которой расположены блоки датчиков постоянного магнитного поля, и ось четвертого электромагнитного датчика параллельна оси электромагнитного датчика, расположенного в плоскости перпендикулярной линии, соединяющей центры блоков магнитных датчиков, и центры параллельных электромагнитных датчиков разнесены, позволяет определить ток в коммуникации и глубину ее залегания, при нахождении устройства над коммуникацией. Отклонение от оси коммуникации по высоте также вызывают скачки измерения постоянного магнитного поля и приводят к ложным выводам. Наличие четвертого электромагнитного датчика позволяет внести корректировку в результаты измерений, и повысить достоверность обнаружения дефектов. Контроль величины изменения тока в коммуникации является дополнительным признаком наличия дефекта изоляции и позволяет повысить достоверность обнаружения дефектов изоляции и дефектов металла.
Использование в устройстве трех блоков датчиков постоянного магнитного поля, расположенных на одной оси и ось каждого из датчиков в блоке параллельна оси соответствующего датчика в двух других блоках, позволяет вычислить по два градиента постоянного магнитного поля, на одной оси для каждой тройки датчиков, например, первый градиент между датчиками 1X и 2Х и второй градиент между датчиками 2Х и 3Х, аналогично, первый градиент между 1Z и 2Z и второй градиент между 2Z и 3Z для блоков, состоящих из двух датчиков, и разницу этих градиентов (рис. 1). Расстояния между датчиками в первом (1Z) и втором (2Z) блоках и датчиками во втором (2Z) и третьем (3Z) блоках, для упрощения расчетов, должны быть одинаковы. Учет величины изменения градиентов и их соотношений позволяет исключить искажения, вызванные изменением наклона датчика в постоянном магнитном поле Земли, которые существенны. Это значительно повышает достоверность обнаружения дефектов металла трубопровода.
Использование в устройстве четырех блоков датчиков постоянного магнитного поля, расположенных на одной оси, и ось каждого из датчиков в блоке параллельна оси соответствующего датчика в трех других блоках, позволяет вычислить по два градиента постоянного магнитного поля, на одной оси для каждой четверки блоков датчиков, например, первый градиент между датчиками 1Z и 2Z и второй градиент между датчиками 3Z и 4Z, для блоков, состоящих из одного датчика (рис. 2). Расстояния между датчиками в первом (1Z) и втором (2Z) блоках и датчиками в третьем (3Z) и четвертом (4Z) блоках, для упрощения расчетов, должны быть одинаковы. Наличие четвертого блока датчиков позволяет разнести на большее расстояние попарно блоки датчиков, и измерить градиенты, отношение градиентов и величину разности градиентов на большем удалении, что повышает помехозащищенность при отклонении оси датчиков от первоначального положения.
Использование в каждом блоке датчиков постоянного магнитного поля только одного датчика предполагает размещение его под произвольным углом к линии, соединяющей центры датчиков в блоках. Предпочтительным расположением является расположение оси датчика, вдоль линии, соединяющей центры датчиков в блоках (рис. 2). При этом оси датчиков во всех блоках параллельны.
Для определения места нахождения коммуникации, в ней, с помощью генератора переменного тока, создают переменный ток, который, в свою очередь, создает переменное электромагнитное поле, принимаемое тремя электромагнитными датчиками. Центры датчиков расположены на одной линии, а оси датчиков взаимоортогональны. Причем оси двух из трех датчиков лежат в плоскостях, перпендикулярных линии, соединяющей центры блоков датчиков постоянного магнитного поля, а ось третьего датчика параллельна линии, соединяющей центры блоков датчиков постоянного магнитного поля. Наличие трех, взаимоортогональных датчиков достаточно для определения места прохождения трассы.
Для определения глубины залегания коммуникации и тока, создаваемого в трубопроводе генератором, устройство содержит четвертый электромагнитный датчик, центр которого находится на линии соединяющей центры трех электромагнитных датчиков (D4, рис. 3), а ось параллельна оси одного из трех других датчиков (D2), отстоит от него на максимальном расстоянии, определяемом размерами корпуса устройства, и лежит в плоскости перпендикулярной линии, соединяющей центры блоков датчиков постоянного магнитного поля. По величине сигнала на параллельных электромагнитных датчиках и расстоянию между ними, при нахождении устройства над коммуникацией, рассчитывают величину глубины залегания трубопровода и величину наводимого в трубопроводе тока.
Контактные датчики разности потенциалов представляют собой два внешних электрических штыря или пластины, непосредственно устанавливаемые на поверхность грунта. При этом выполняется измерение разности потенциалов между контактами, и результаты синхронизируются по времени и координатам с результатами других измерений. Рост значения разности потенциалов свидетельствует о нарушении изоляции металла трубопровода, что дает дополнительные сведения о возможном дефекте металла за счет внешней коррозии.
Емкостные датчики разности потенциалов представляют собой две внешних пластины или контакты в руках двух операторов, находящиеся на некотором расстоянии вдоль трубопровода над поверхностью грунта. При этом выполняется измерение изменения емкости датчиков, свидетельствующие о величине разности потенциалов на поверхности грунта, и результаты синхронизируются по времени и координатам с результатами других измерений. Рост значения разности потенциалов свидетельствует о нарушении изоляции металла трубопровода, что дает дополнительные сведения о возможном дефекте металла за счет внешней коррозии. Емкостные методы контроля позволяют значительно повысить скорость контроля изоляции трубопровода.
Индукционные датчики постоянного магнитного поля имеют большой динамический диапазон, что позволяет упростить схемотехнику.
Феррозондовые датчики постоянного магнитного поля имеют большую чувствительность, что позволяет выявлять даже незначительные дефекты.
Способ обнаружения дефектов трубопроводов, ответвлений и врезок в трубопровод с использованием заявленного устройства осуществляют следующим образом.
Сначала осуществляют возбуждение электромагнитного излучения в коммуникации (1) при помощи генератора (2) переменного электрического тока (рис. 4), который подключают при помощи первого провода к металлу трубопровода, а второй провод генератора (2) электрического тока заземляют. С помощью генератора (2) электрического тока создают переменный ток в коммуникации (1), который, в свою очередь, создает изменяющееся электромагнитное поле над коммуникацией (1), а также повышенное напряжение в области нарушения изоляции металла трубопровода.
Данный ток в коммуникации также может быть наведен током от сторонних источников, например, током в электрическом кабеле от сети, либо бесконтактно, с помощью генератора и излучающей электромагнитной антенны, установленной над коммуникацией.
Затем осуществляют установку рядом с предполагаемым местом прохождения коммуникации устройство (3), содержащее, по меньшей мере, два блока датчиков постоянного магнитного поля и три датчика переменного электромагнитного поля (рис. 4).
После чего осуществляют измерение ориентации вектора электромагнитной индукции, создаваемого коммуникацией, и уровня напряженности (амплитуды) переменного электромагнитного поля в каждом электромагнитном датчике при помощи заявленного устройства, расположенного над предполагаемым местом прохождения коммуникации (1). Измерение ориентации вектора электромагнитной индукции и уровня напряженности электромагнитного поля осуществляют за счет того, что сигнал электромагнитного поля от коммуникации принимается, по меньшей мере, тремя электромагнитными датчиками, оси которых взаимоортогональны. С датчиков сигнал поступает на блок предусилителей (9) (рис. 5), где усиливается, и поступает на вход аналого-цифрового преобразователя АЦП (10), оцифровывается в нем, и поступает на микропроцессор (11). В микропроцессоре (11) рассчитывается амплитуда сигнала, направление вектора электромагнитной индукции, расстояние до коммуникации. Результаты расчетов выводятся на индикатор (13) и заносятся в блок памяти (12), управление устройством осуществляется блоком управления (14).
Использование трех электромагнитных датчиков, в отличие от прототипа, в котором содержится шесть датчиков, позволяет вычислить место положение коммуникации, позволяет на 50% удешевить стоимость антенного блока и входных каскадов электроники, улучшить эксплуатационные характеристики прибора за счет снижения веса антенн, при этом решить задачи поиска места прохождения коммуникации.
Далее с помощью оператора, например, вращением прибора вокруг своей оси, определяют максимальный уровень сигнала и направление на трассу.
Затем с помощью оператора осуществляют перемещение устройства над коммуникацией, перпендикулярно оси предполагаемой трассы прохождения коммуникации в новую точку измерения и осуществляют измерение ориентации вектора электромагнитной индукции и максимального уровня напряженности электромагнитного поля в новой точке измерения, как описано выше. При этом повторение этапов перемещения блока датчиков электромагнитного поля над коммуникацией перпендикулярно оси предполагаемой трассы прохождения и измерения ориентации вектора электромагнитной индукции и уровня напряженности электромагнитного поля необходимое количество раз (не менее трех раз) до тех пор, пока заявленное устройство не окажется над осью коммуникации, где точность определения места дефекта металла коммуникации выше. При невозможности нахождения блока датчиков над осью коммуникации, измерения проводят в точке, наиболее приближенной к месту прохождения коммуникации.
Находясь над коммуникацией, производят измерение градиентов постоянного магнитного поля с помощью датчиков постоянного магнитного поля. Выполняют измерения разности потенциалов над коммуникацией и координаты точки измерений с помощью встроенного блока GPS\Глонасс. Результаты измерений заносятся в память и выводятся на индикатор устройства.
При использовании в устройстве дополнительного четвертого датчика электромагнитного поля, его центр располагают на оси, проходящей через центры трех электромагнитных датчиков и параллельной оси, на которой расположены блоки датчиков постоянного магнитного поля, и ось четвертого электромагнитного датчика параллельна оси электромагнитного датчика, расположенного в плоскости перпендикулярной линии, соединяющей центры блоков датчиков постоянного магнитного поля, и центры параллельных электромагнитных датчиков разнесены. Это позволяет определить ток в коммуникации и расстояние от устройства до трубопровода, при нахождении устройства над коммуникацией. По изменению тока, определяется нарушение изоляции трубопровода, а изменение расстояния от устройства до трубопровода влечет изменение величины градиентов постоянного магнитного поля, что создает помехи в определении дефектов и должно контролироваться.
Проводят непрерывное измерение градиентов постоянного магнитного поля над трубопроводом магнитометрической антенной, состоящей как минимум из двух блоков датчиков магнитного поля, путем перемещения датчиков вдоль трубопровода; одновременно производят измерение величины переменного электромагнитного поля над трубопроводом с помощью электромагнитных датчиков, синхронизированных по времени и месту измерения с результатами измерения значений градиентов магнитной индукции над трубопроводом, и рассчитывают отклонение прибора от оси трубопровода и стремятся к расположению устройства над осью трубопровода. Одновременно производят измерение разности потенциалов над трубопроводом с помощью соответствующих датчиков, синхронизированных по времени и месту измерения с результатами измерения значений магнитной индукции над трубопроводом.
Проводят определение координат измерений встроенным модулем определения координат GPS\Глонасс.
Проводят отображение результатов измеренных значений на индикаторе, и запись результатов измерений во встроенную память.
При использовании в устройстве двух блоков феррозондовых датчиков магнитного поля, сигнал с датчиков поступает на блок обработки сигнала, в котором находятся предусилители, синхронный детектор, интегратор, системы обратной связи и возбуждения первой гармоники. Усиленный сигнал поступает на вход аналого-цифрового преобразователя АЦП (10) и оцифровывается в нем, с которого цифровой сигнал поступает в микропроцессор (11). В микропроцессоре (11) вычисляют градиенты в каждой паре соосных датчиков. Результаты расчетов выводятся на индикатор (13) и заносятся в блок памяти (12) (рис. 5).
При использовании в устройстве трех блоков датчиков магнитного поля, вычисляют по два градиента в каждой паре соосных датчиков. Первый градиент - между датчиками первого и второго блоков, и второй градиент - между соосными датчиками второго и третьего блока. Вычисляют разницу первого и второго градиентов соответствующих датчиков в каждой паре, и по полученным значениям определяют уровень сигнала над трассой. Учет величины изменения градиентов и их соотношения позволяет исключить искажения, вызванные изменением наклона датчика. Данный способ позволяет устранить влияние глобального магнитного поля на измерения поля дефектов и существенно снизить влияние колебания осей датчиков в пространстве, вызванное перемещениями оператора, на показания прибора.
При использовании в устройстве четырех блоков датчиков магнитного поля, вычисляют по два градиента в каждой паре соосных датчиков. Первый градиент - между датчиками первого и второго блоков, и второй градиент - между датчиками третьего и четвертого блока. Вычисляют отношение и разницу первого и второго градиентов соответствующих датчиков в каждой паре, и по полученным значениям определяют уровень сигнала над трассой. Учет величины изменения градиентов и их соотношения позволяет исключить искажения, вызванные изменением наклона датчика. Наличие четвертого блока датчиков позволяет вычислить градиенты, между датчиками, разнесенными на большее расстояние, чем при использовании трех блоков датчиков, и дает более точный результат. Данный способ позволяет устранить влияние глобального магнитного поля на измерения градиента от поля дефектов, благодаря тому, что поле Земли вдоль оси меняется незначительно от расстояния, а поле дефекта металла, значительно, примерно пропорционально квадрату расстояния до трубопровода. Что позволяет существенно снизить влияние колебания осей датчиков в пространстве, вызванное перемещениями оператора, на результаты измерений за счет фиксации отклонения оси прибора по показаниям удаленной от коммуникации пары датчиков.
При использовании в устройстве в каждом блоке одного датчика постоянного магнитного поля рассчитывают одно значение градиента в случае использования двух блоков, и рассчитывают попарно величину градиентов, их соотношение и разницу значений двух градиентов для трех и четырех блоков.
При использовании в устройстве в каждом блоке двух датчиков магнитного поля рассчитывают два значения градиентов для каждой пары соосных датчиков в случае использования двух блоков, и рассчитывают градиенты, их соотношение и две разницы значений четырех градиентов для каждой пары соосных датчиков для трех и четырех блоков.
При использовании в устройстве в каждом блоке трех датчиков магнитного поля рассчитывают три значения градиентов для каждой пары соосных датчиков в случае использования двух блоков, и рассчитывают градиенты, их соотношение и три разницы значений градиентов для каждой пары соосных датчиков для трех и четырех блоков.
Увеличение количества датчиков в блоке позволяет повысить достоверность определения дефектов металла трубопровода за счет контроля уровня градиентов в разных направлениях векторов постоянного магнитного поля.
При использовании в качестве датчиков разности потенциалов контактных датчиков, при каждом измерении датчик устанавливается на грунт, сигнал с датчика поступает на блок обработки аналогового сигнала, который может представлять собой согласующий усилитель. Усиленный сигнал поступает на вход аналого-цифрового преобразователя АЦП (10) оцифровывается в нем, с которого цифровой сигнал поступает в микропроцессор (11). В микропроцессоре (11) вычисляют величину разности потенциалов. Результаты расчетов выводятся на индикатор (13) и заносятся в блок памяти (12) (рис. 5).
Использование в качестве датчика разности потенциала емкостного датчика позволяет проводить измерения непрерывно и бесконтактно. Сигнал с датчика, попадая на блок обработки аналогового сигнала, содержащий предусилитель и колебательный контур, и позволяет контролировать величину емкости между контактными пластинами и грунтом. Усиленный сигнал поступает на вход аналого-цифрового преобразователя АЦП (10) оцифровывается в нем, с которого цифровой сигнал поступает в микропроцессор (11). В микропроцессоре (11) вычисляют величину, пропорциональную разнице потенциалов. Результаты расчетов выводятся на индикатор (13) и заносятся в блок памяти (12) (рис. 5).
Наличие дефектов в трубопроводе определяют по величине изменения градиентов магнитного поля в зависимости от величины и направленности магнитного поля, учитывая поправку на изменение положения магнитометрической антенны по соотношению градиентов магнитного поля, величине отклонения прибора от оси трубопровода, рассчитанного по величине переменного электромагнитного поля, величине разности потенциалов на поверхности земли над трубопроводом и изменению величины тока в коммуникации. Результаты измерений используют для формирования графиков значений величины градиентов постоянного магнитного поля над трубопроводом, величины отклонения от оси трубопровода, разности потенциалов над трубопроводом и величины тока в коммуникации, и по совокупности признаков, выделяемых на графике, выявляются места, содержащие дефекты или врезки. На основе полученных данных об отклонении от оси трубопровода проводят пересчет величины изменения градиентов постоянного магнитного поля, строят график и наличие дефектов в трубопроводе определяют по изменению величин уточненных градиентов постоянного магнитного поля, что существенно повышает достоверность определения дефектов.
В отличие от прототипа, содержащего 6 датчиков постоянного магнитного поля, и не решающего проблему со скачками показаний при колебаниях корпуса в пространстве, при использовании 3 и 4 блоков датчиков, даже содержащими по одному датчику, исключается или учитывается влияние колебаний, на показания прибора, связанных с величиной глобального магнитного поля Земли и наличием удаленных источников постоянного магнитного поля.
В отличие от прототипа, содержащего 6 датчиков переменного магнитного поля, и не решающего проблему со скачками показаний при колебаниях корпуса в пространстве, при использовании 3 электромагнитных датчиков, достигается возможность определения места прохождения коммуникации, при использовании 4 электромагнитных датчиков достигается возможность измерения глубины залегания и тока в коммуникации, и синхронизация этих измерений с результатами измерения градиентов постоянного магнитного поля.
В отличие от прототипа, содержащего только датчики постоянного и переменного магнитных полей, наличие датчиков контроля разности потенциалов, синхронизированных с измерением постоянного магнитного поля, позволяет обнаружить зоны нарушения изоляции трубопроводов, которые с большой вероятностью, подвергаются коррозийному воздействию и на которых наличие дефектов металла трубопровода наиболее вероятна. Совпадение характерных признаков дефектов, полученных с помощью датчиков постоянного магнитного поля и датчиков разницы потенциала является дополнительным признаком дефекта металла.
Расположение линии, на которой находятся центры датчиков постоянного магнитного поля, и линии, на которой находятся центры датчиков переменного магнитного поля, параллельно и на небольшом расстоянии друг от друга в одном корпусе, позволяет значительно упростить расчеты и выявление дефектов металла трубопровода и сократить количество выявленных ложных дефектов.
Наивысшая точность достигается при пространственном расположении прибора таким образом, что линии, на которых находятся центры датчиков постоянного и переменного магнитных полей, перпендикулярны оси коммуникации. Ориентация прибора осуществляется на основе индикации по показаниям датчиков переменного электромагнитного поля.
Таким образом, за счет одновременного измерения составляющих градиентов постоянного магнитного поля, величины переменного магнитного поля, расчета глубины залегания, отклонения от оси трубопровода, тока в коммуникации и измерения разности потенциалов над трубопроводом, обеспечивается повышение точности и достоверности определения места дефекта металла и места дефекта изоляции трубопровода.
Изобретение было раскрыто выше со ссылкой на конкретные варианты его осуществления. Для специалистов могут быть очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как она раскрыта в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство обнаружения дефектов металлических трубопроводов | 2023 |
|
RU2831870C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2742631C2 |
| СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2633018C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2024 |
|
RU2824417C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И НЕСАНКЦИОНИРОВАННЫХ ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572907C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2024 |
|
RU2837559C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| Способ для бесконтактного поиска места утечки из трубопроводов и устройство для его реализации | 2024 |
|
RU2837183C1 |
| Способ обнаружения несанкционированных врезок в трубопровод | 2018 |
|
RU2681552C1 |
Группа изобретений относится к способу и устройству контроля состояния металлических трубопроводов с поверхности грунта над трубопроводом. Техническим результатом заявленной группы изобретений является повышение точности и достоверности определения места дефекта металла металлических трубопроводов с поверхности грунта над трубопроводом, устранение количества ложных признаков дефекта, сокращение времени поиска дефектов и снижение габаритов оборудования. Расположение линии, на которой находятся центры датчиков постоянного магнитного поля, и линии, на которой находятся центры датчиков переменного магнитного поля, параллельно и на небольшом расстоянии друг от друга в одном корпусе, позволяет значительно упростить расчеты и выявление дефектов металла трубопровода и сократить количество выявленных ложных дефектов, а за счет одновременного измерения составляющих градиентов постоянного магнитного поля, величины переменного магнитного поля, расчета глубины залегания, отклонения от оси трубопровода, тока в коммуникации и измерения разности потенциалов над трубопроводом достигается повышение точности и достоверности определения места дефекта металла и места дефекта изоляции трубопровода. 2 н. и 9 з.п. ф-лы, 5 ил.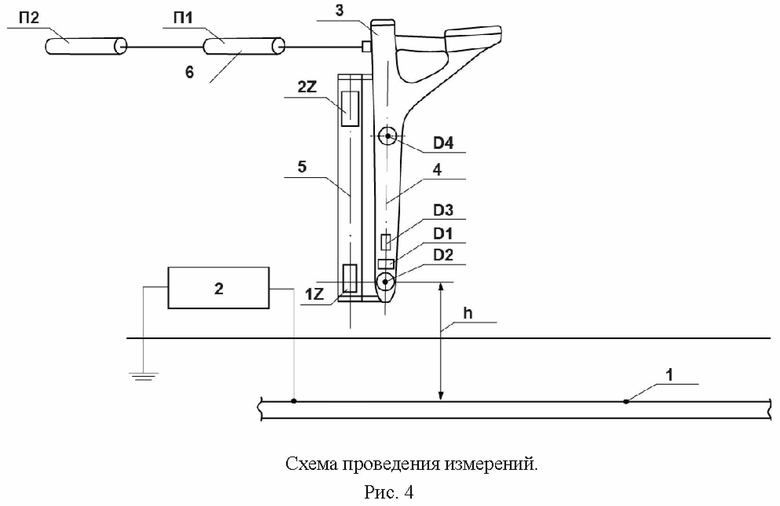
1. Способ обнаружения дефектов трубопроводов, ответвлений и врезок в трубопровод, включающий следующие этапы:
а) подключение генератора переменного тока к трубопроводу и создание напряжения между трубопроводом и грунтом;
б) непрерывное измерение магнитометрической антенной градиента постоянного магнитного поля, состоящей как минимум из двух блоков датчиков постоянного магнитного поля, над трубопроводом путем перемещения антенны вдоль трубопровода;
в) одновременно производят измерение величины переменного электромагнитного поля над поверхностью грунта над трубопроводом с помощью электромагнитных датчиков, синхронизированных по времени и месту измерения с результатами измерения значений градиента постоянного магнитного поля над трубопроводом, и рассчитывают отклонение прибора от оси трубопровода и величину тока, наводимого в трубопроводе генератором;
г) одновременно производят измерение разности потенциалов на поверхности грунта над трубопроводом с помощью датчиков, синхронизированных по времени и месту измерения с результатами измерения значений магнитной индукции над трубопроводом;
д) определение координат измерений встроенным модулем определения координат;
е) отображение результатов измеренных значений на индикаторе и запись результатов измерений во встроенную память;
ж) определение дефектов трубопровода по величине изменения градиентов постоянного магнитного поля, величине отклонения от оси трубопровода, рассчитанной по величине переменного электромагнитного поля, величине наводимого в трубопроводе тока и величине разности потенциалов над трубопроводом; при этом наличие участка трубопровода с дефектом или врезкой определяют по плавному возрастанию или убыванию измеренной величины градиентов магнитного поля в зависимости от величины и направленности магнитного поля, учитывая поправку на изменение положения магнитометрической антенны по соотношению градиентов магнитного поля, учитывая поправку на величину отклонения от оси трубопровода, измеренную по величине электромагнитного поля, а также учитывая величину изменения тока более чем на 10%, наведенного генератором в трубопроводе, и учитывая величину разности потенциалов над трубопроводом по плавному возрастанию или убыванию измеренной величины; результаты измерений используют для формирования графиков измеренных значений, и по совокупности признаков, выделяемых на графике, выявляются места, содержащие дефекты металла трубопровода, дефекты изоляции трубопровода или врезки.
2. Устройство обнаружения дефектов трубопроводов, ответвлений и врезок в трубопровод для осуществления способа по п. 1, состоящее из приемника, содержащего корпус, с размещенными в нем блоками датчиков постоянного магнитного поля, состоящих как минимум из двух блоков датчиков постоянного магнитного поля, и размещенными в корпусе датчиками переменного электромагнитного поля, приемника GPS/Глонасс, отличающееся тем, что оси датчиков в блоках датчиков постоянного магнитного поля параллельны, а центры датчиков находятся на одной оси, и каждый блок датчиков постоянного магнитного поля содержит как минимум один датчик, также содержит группу электромагнитных датчиков, которая состоит как минимум из трех взаимоортогональных датчиков, центры которых находятся на одной оси, параллельной оси, на которой расположены датчики постоянного магнитного поля, а плоскость размещения одного из электромагнитных датчиков перпендикулярна линии, соединяющей центры блоков датчиков постоянного магнитного поля, также содержит датчики измерения величины разности потенциалов над металлическим трубопроводом, при этом датчики приемника соединены с блоком обработки аналогового сигнала, с блоками предусилителей, которые в свою очередь соединены с аналого-цифровыми преобразователями, а они соединены с микропроцессором, с которым, в свою очередь, соединены блок памяти, блок управления и индикатор, содержащий блок питания, питающий все элементы приемника.
3. Устройство по п. 2, отличающееся тем, что содержит три блока датчиков постоянного магнитного поля, расположенных на одной оси.
4. Устройство по п. 2, отличающееся тем, что содержит четыре блока датчиков постоянного магнитного поля, расположенных на одной оси.
5. Устройство по пп. 2-4, отличающееся тем, что блоки датчиков постоянного магнитного поля содержат по два взаимоортогональных датчика и оси датчиков в каждом блоке датчиков постоянного магнитного поля параллельны осям датчиков в остальных блоках, а центры всех датчиков находятся на одной оси.
6. Устройство по пп. 2-4, отличающееся тем, что блоки датчиков постоянного магнитного поля содержат по три взаимоортогональных датчика и оси датчиков в каждом блоке датчиков постоянного магнитного поля параллельны осям датчиков в остальных блоках, а центры всех датчиков находятся на одной оси.
7. Устройство по пп. 2-6, отличающееся тем, что содержит дополнительно четвертый электромагнитный датчик переменного электромагнитного поля, центр которого расположен на оси, проходящей через центры трех электромагнитных датчиков и параллельной оси, на которой расположены блоки датчиков постоянного магнитного поля, и ось четвертого электромагнитного датчика параллельна оси электромагнитного датчика, расположенного в плоскости перпендикулярной линии, соединяющей центры блоков датчиков постоянного магнитного поля, и центры параллельных электромагнитных датчиков разнесены.
8. Устройство по пп. 2-7, отличающееся тем, что в качестве датчиков разности потенциалов над трубопроводом используют контактные датчики.
9. Устройство по пп. 2-7, отличающееся тем, что в качестве датчиков разности потенциалов над трубопроводом используют емкостные датчики.
10. Устройство по пп. 2-7, отличающееся тем, что в качестве датчиков постоянного магнитного поля используют индукционные датчики.
11. Устройство по пп. 2-7, отличающееся тем, что в качестве датчиков постоянного магнитного поля используют феррозондовые датчики.

