Изобретение относится к радиотехнике и связи и может быть использовано при построении управляемых генераторов.
Известен генератор [1 (с. 202 - рис. 4-16. «Электронный генератор с ограничением амплитуды колебаний»)], содержащий два интегратора, сумматор, нелинейный элемент (с релейной характеристикой) и два пассивных управляемых делителя, осуществляющих перестройку выходных колебаний по частоте. На выходе нелинейного элемента формируются биполярные импульсы прямоугольной формы с высоким содержанием высших нечетных гармоник. Биполярный прямоугольный сигнал подается по цепи обратной связи непосредственно на вход сумматора, поэтому на выходе первого интегратора будет сформирован сигнал, имеющий значительные нелинейные искажения.
Известен управляемый генератор [2 (с. 17 - рис. 1-9.)], который содержит два интегратора, два умножителя, нелинейный элемент и сумматор, к выходу которого подключен первый умножитель, управляющий вход которого соединен с управляющей шиной и управляющим входом второго умножителя, между выходом которого и первым входом сумматора включен второй интегратор, выход которого соединен со вторым выходом управляемого генератора, первый выход которого подключен к выходу первого интегратора, при этом нелинейный элемент включен между первым выходом управляемого генератора и вторым входом сумматора, а вход второго умножителя подключен к выходу первого интегратора.
Для стабилизации амплитуды используется нелинейный элемент, при этом коэффициент гармоник и стабильность амплитуды связаны обратной зависимостью, то есть уменьшение коэффициента гармоник за счет уменьшения степени нелинейности приводит к снижению стабильности амплитуды и, напротив, увеличение стабильности амплитуды ведет к увеличению гармоник в выходном сигнале. Сравнительно невысокие метрологические характеристики (стабильность амплитуды 1-2% при коэффициенте гармоник 0,5-1%) ограничивают применение таких генераторов [2 (с. 19)].
Наиболее близким устройством к заявленному изобретению по совокупности существенных признаков является, принятый за прототип, управляемый генератор [3], содержащий два интегратора, три умножителя, три квадратора, релейный элемент, ограничитель, два сумматора и инвертор, включенный между выходом третьего квадратора и третьим входом второго сумматора, выход которого соединен со вторым входом третьего умножителя, между выходом которого и первым входом первого сумматора включен ограничитель, при этом первый интегратор включен между выходом первого умножителя и первым входом второго умножителя, к выходу которого подключен вход второго интегратора, выход которого соединен со вторым входом первого сумматора, к выходу которого подключен первый вход первого умножителя, второй вход которого соединен со вторым входом второго умножителя и первой шиной управляемого генератора, вторая шина которого соединена с входом третьего квадратора, причем выходы первого и второго интеграторов соединены с соответствующими выходами управляемого генератора, первый квадратор включен между первым выходом управляемого генератора и первым входом второго сумматора, второй квадратор включен между вторым выходом управляемого генератора и вторым входом второго сумматора, а релейный элемент включен между первым выходом управляемого генератора и первым входом третьего умножителя.
На первом выходе генератора коэффициент нелинейных искажений превышает 0,05%, что не позволяет отнести данное устройство к прецизионным генераторам по данному показателю.
Задачей, на решение которой направлено изобретение, является повышение спектральной чистоты формируемых квадратурных гармонических сигналов.
Технический результат, достигаемый при осуществлении изобретения, заключается в повышении спектральной чистоты формируемых квадратурных гармонических сигналов путем введения дополнительных элементов и организации новых функциональных связей между элементами.
Указанный технический результат при осуществлении изобретения достигается тем, что в управляемый генератор квадратурных сигналов, содержащий первый и второй умножители, первый и второй интеграторы, первый и второй квадраторы, первый и второй сумматоры и инвертор, при этом первый квадратор включен между выходом первого интегратора и первым входом второго сумматора, второй квадратор 6 включен между выходом второго интегратора и вторым входом второго сумматора, к выходу первого сумматора подключен первый вход первого умножителя, выход которого соединен с входом первого интегратора, к выходу которого подключен первый вход второго умножителя, выход которого соединен с входом второго интегратора, выход которого соединен со вторым входом первого сумматора, при этом вторые входы первого и второго умножителей соединены с управляющей шиной, в него дополнительно введены первый и второй делители, блок извлечения квадратного корня, компаратор, и источник опорного напряжения, минусовой зажим которого соединен с общей шиной, а плюсовой - с инвертирующим входом компаратора, выход которого соединен с четвертым входом первого сумматора и третьим входом второго сумматора, между выходом которого и неинвертирующим входом компаратора включен блок извлечения квадратного корня, при этом инвертор включен между выходом первого интегратора и третьим входом первого сумматора, первый вход которого соединен выходом первого делителя и первым выходом управляемого генератора квадратурных сигналов, второй выход которого соединен с выходом второго делителя, первый вход которого подключен к выходу второго интегратора, причем выход блока извлечения квадратного корня соединен со вторыми входами первого и второго делителей, а первый вход первого делителя подключен к выходу первого интегратора.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения. Следовательно, заявленное изобретение соответствует условию «новизна».
Введение в предлагаемый управляемый генератор квадратурных сигналов двух делителей, блока извлечения квадратного корня, компаратора и источника опорного напряжения, а также организация новых функциональных связей между элементами позволили повысить спектральную чистоту формируемых квадратурных гармонических сигналов.
Изобретение поясняется структурной схемой управляемого генератора квадратурных сигналов, изображенной на фиг. 1, и графиками, поясняющими принцип работы управляемого генератора квадратурных сигналов - на фиг. 2 и фиг. 3.
Управляемый генератор квадратурных сигналов содержит (фиг. 1) первый 1 и второй 2 умножители, первый 3 и второй интеграторы 4, первый 5 и второй 6 квадраторы, первый 7 и второй 8 сумматоры, инвертор 9, первый 10 и второй 11 делители, блок извлечения квадратного корня 12, компаратор 13 и источник опорного напряжения 14, минусовой зажим которого соединен с общей шиной, а плюсовой - с инвертирующим входом компаратора 13, выход которого соединен с четвертым входом первого сумматора 7 и третьим входом второго сумматора 8, между выходом которого и неинвертирующим входом компаратора 13 включен блок извлечения квадратного корня 12, при этом первый квадратор 5 включен между выходом первого интегратора 3 и первым входом второго сумматора 8, второй квадратор 6 включен между выходом второго интегратора 4 и вторым входом второго сумматора 8, а инвертор включен между выходом первого интегратора 3 и третьим входом первого сумматора 7, к выходу которого подключен первый вход первого умножителя 1, между выходом которого и первым входом второго умножителя 2 включен первый интегратор 3, причем выход блока извлечения квадратного корня 12 соединен со вторыми входами первого 10 и второго 11 делителей, шина управления соединена со вторым входом первого умножителя 1 и вторым входом второго умножителя 2, к выходу которого подключен вход второго интегратора 4, выход которого соединен со вторым входом первого сумматора 7, первый вход которого соединен с выходом первого делителя и первым выходом управляемого генератора квадратурных колебаний, второй выход которого соединен с выходом второго делителя 11, первый вход которого подключен к выходу второго интегратора 4, а первый вход первого делителя соединен с выходом первого интегратора 3.
Управляемый генератор квадратурных сигналов работает следующим образом.
Первый умножитель 1 и первый интегратор 3 образуют (фиг. 1) первый управляемый интегратор с передаточной функцией

где τУ1=τ1/(m1·EУ) - постоянная времени первого управляемого интегратора; τ1 - постоянная времени первого интегратора 3; m1 - масштабный коэффициент умножителя 1; EУ - управляющее напряжение; s - комплексная переменная.
Второй умножитель 2 и второй интегратор 4 образуют второй управляемый интегратор с передаточной функцией

где τУ2=τ2/(m2·EУ) - постоянная времени второго управляемого интегратора; τ2 - постоянная времени второго интегратора 4; m2 - масштабный коэффициент умножителя 2.
При одинаковых значениях масштабных коэффициентов m1=m2=m и при равенстве постоянных времени интеграторов τ1=τ2=τ0 также будут иметь одинаковые значения и постоянные времени первого и второго управляемых интеграторов τУ1=τУ2=τУ=τ0/(m·EУ).
Следовательно, и передаточные функции управляемых интеграторов в этом случае будут иметь одинаковые выражения

Умножители 1 и 2, интеграторы 3 и 4, сумматор 7 и инвертор 9 образуют управляемый фильтр (УФ). При подаче на первый вход сумматора 7, то есть на вход УФ сигнала N1(t), на выходе управляемого фильтра формируются два сигнала S1(t) и S2(t).
Для нахождения амплитудно-частотных и фазочастотных характеристик, а также определения резонансной частоты УФ, величины затухания и добротности фильтра найдем передаточные функции (ПФ) управляемого фильтра.
Найдем передаточную функцию УФ по первому W1(s) и второму W2(s) выходу при воздействии входного сигнала N1(t), для чего составим следующую систему уравнений в операторной форме:

где k1, k2 и k3 - коэффициенты первого сумматора 7 по соответствующим входам.
Используя метод исключения переменных в (4), запишем выражения для передаточной функции

и для передаточной функции

При k2=1 выражение (6) можно привести к классическому виду для колебательного звена с передаточной функцией

где ξ=k3/2 - коэффициент затухания, определяющий избирательные свойства звена.
Передаточную функцию W2(s) можно представить в виде последовательного соединения колебательного и дифференцирующего звеньев

Резонансную частоту ω0 управляемого фильтра можно найти из характеристического уравнения, для чего знаменатель в уравнениях (7) и (8) следует приравнять к нулю и найти корни этого уравнения

Для нахождения комплексно-частотных функций в выражениях (8) и (9) необходимо заменить комплексную переменную s→jω


Из (10) и (11) следует, что фазовый сдвиг между выходными сигналами S1(t) и S2(t) будет определяться только параметрами дифференцирующего звена с передаточной функцией WD(s)=τs, поскольку WD(jω)=j·ωτ.
Фазовый сдвиг

Из (12) следует, что фазовый сдвиг межу выходными сигналами S1(t) и S2(t) не зависит от частоты и во всем диапазоне рабочих частот составляет 90 электрических градусов.
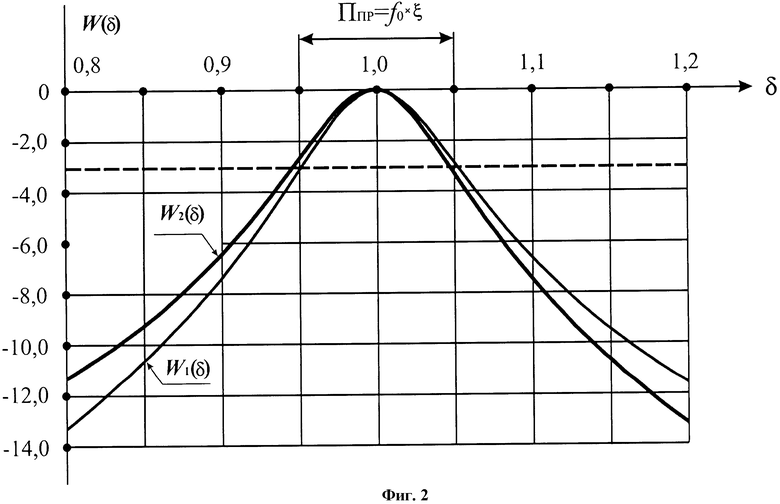
Амплитудно-частотные характеристики


удобно представить в нормированном виде (фиг. 2), для чего введем в рассмотрение относительную расстройку по частоте

где ω0=1/τУ - резонансная частота.
После подстановки (15) в (13) и (14) получим


Графические зависимости коэффициентов передачи W1(ω) и W2(ω) от величины относительной расстройки δ приведены на фиг. 2. На резонансной частоте (при δ=1)

При равенстве коэффициентов k1=k3 коэффициенты передачи также будут равны W1(1)=W2(1)=1.
Спектральная чистота формируемых сигналов S1(t) и S2(t) будет зависеть как от формы сигнала N1(t), поступающего по цепи обратной связи, так и от добротности Q резонансной системы (управляемого фильтра), которая, в свою очередь, определяет (фиг. 2) полосу пропускания ППР фильтра.
Полосу пропускания ППР условно определяют по резонансной кривой (фиг. 2) на уровне 0,707 (-3 дБ) от ее максимального значения, соответствующего резонансной частоте.
Полоса пропускания управляемого фильтра

Добротность управляемого фильтра связана с коэффициентом затухания ξ следующим образом: Q=1/ξ=2/k3, следовательно, величину добротности Q, коэффициент затухания ξ и полосу пропускания ППР можно регулировать с помощью коэффициента k3, но при этом необходимо соблюдать равенство коэффициентов k1=k3.
В этом случае при любых значениях добротности на частоте резонанса амплитудные значения A1 и A2 сигналов S1(t) и S2(t) будут иметь одинаковые значения, равные единице, а фазовый сдвиг между ними составит 90 электрических градусов. Таким образом, на выходах управляемого фильтра формируются квадратурные сигналы стабильной амплитуды.
В предлагаемом решении на вход первого сумматора 7 подается квазигармонический сигнал N1(t) стабильной амплитуды A*, имеющий незначительное количество высших гармонических в своем составе.
Формирование сигнала обратной связи N1(t) происходит следующим образом.
Квадраторы 5 и 6, сумматор 8 и блок извлечения квадратного корня 12 образуют безынерционный датчик напряжения (ДН).
При подаче на вход квадратора 5 гармонического сигнала S1(t)=A1sin(ωt) на его выходе формируется сигнал

где m3 - масштабный коэффициент квадратора 5.
При подаче на вход квадратора 6 гармонического сигнала S2(t)=A2cos(ωt) на его выходе формируется сигнал

где m4 - масштабный коэффициент квадратора 6.
В результате суммирования сигналов L1(t) и L2(t) на выходе сумматора 8 образуется напряжение

На выходе блока извлечения квадратного корня 12, то есть на выходе ДН, формируется напряжение

При выполнении условий k3=k4=1, m3=m4=1 и при равенстве амплитудных значений A1=А2=A напряжение

то есть на выходе ДН напряжение будет в точности равно амплитудному значению Em=A.
На выходе делителя 10, то есть на первом выходе управляемого генератора квадратурных сигналов, формируется сигнал

где A*=1 - нормированное значение амплитуды сигнала N1(t).
Аналогично работает второй делитель 11, на выходе которого также формируется стабильный по амплитуде сигнал

Стабилизированный по амплитуде сигнал N1(t) 10 поступает на первый вход сумматора 7, замыкая цепь обратной связи и создавая условия для возбуждения гармонических колебаний.
Частота колебаний Ω0 в управляемом генераторе совпадает с резонансной частотой ω0=1/τУ и изменяется прямо пропорционально изменению управляющего напряжения EУ

Поскольку на вход управляемого фильтра с выхода первого делителя 10 подается гармонический сигнал, в котором практически нет высших гармонических составляющих, то спектральная чистота формируемых сигналов S1(t) и S2(t) намного выше, чем в прототипе.
Оценка нелинейных искажений выходных сигналов генератора проводилась на математической модели в программе PSIM-9. Нелинейные искажения на выходах управляемого генератора измерялись с помощью блока (THD - Total harmonic distortion) программы PSIM.
На первом выходе коэффициент нелинейных искажений не превысил 0,011%, что примерно в пять раз меньше по сравнению с прототипом.
На втором выходе управляемого генератора искажения сигнала N2(t) будут еще меньше из-за фильтрующего свойства второго интегратора 4. Незначительное содержание высших гармоник выходных сигналов N1(t) и N2(t) является достоинством предлагаемого генератора.
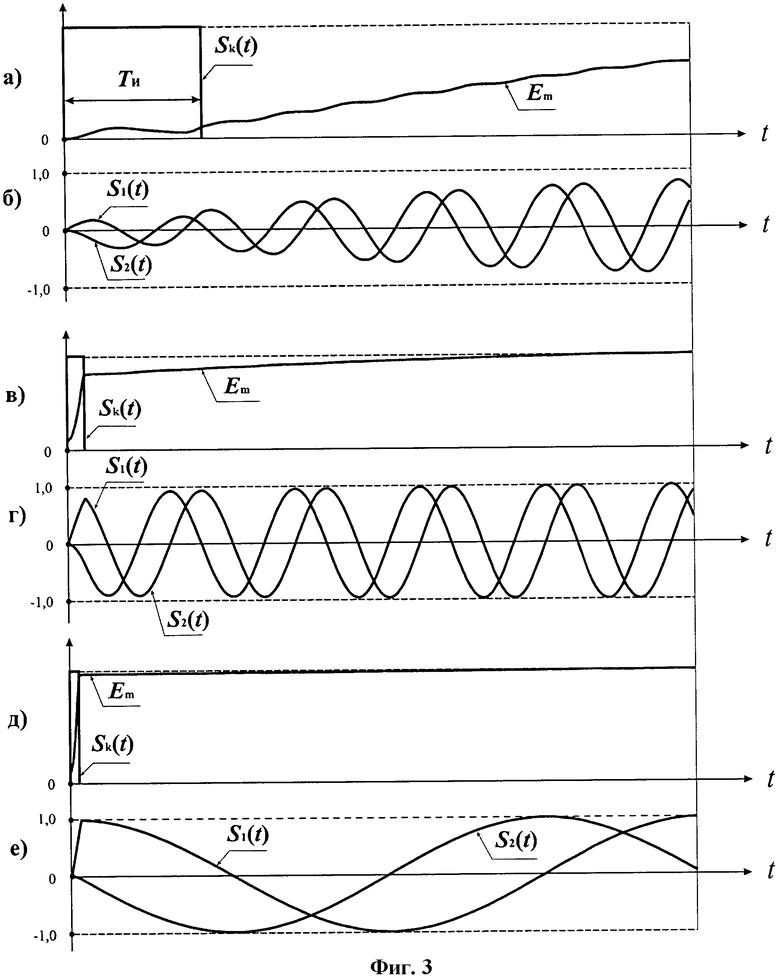
Для сокращения времени запуска генератора на четвертый вход сумматора 7 поступает корректирующий сигнал Sk(t) с формирователя одиночного импульса, который выполнен из компаратора 13 и источника опорного напряжения 14. Корректирующий сигнал Sk(t) подается также на третий вход сумматора 8, обеспечивая тем самым нормальную работу делителей 10 и 11, которые при отсутствии корректирующего сигнала формируют на своих выходах кратковременный выброс напряжения при запуске генератора и для устранения которого на выходах делителей 10 и 11 потребуются ограничители.
Введение корректирующего сигнала Sk(t) значительно улучшает динамику управляемого генератора как в пусковом режиме (фиг. 3), так и при переключении генератора с одной частоты на другую.
Длительность переходного процесса при запуске управляемого генератора квадратурных сигналов определяется (фиг. 3) длительностью ТИ корректирующего сигнала Sk(t) и значением коэффициента передачи по четвертому входу сумматора 7. Длительность TИ сигнала Sk(t) можно изменять с помощью напряжения смещения E0, поступающего на вход компаратора 13 от источника опорного напряжения 14.
Графические зависимости, поясняющие принцип уменьшения переходных процессов в генераторе, приведены на фиг. 3. На фиг. 3, а и фиг. 3, б показаны графики для случая, когда величина опорного напряжения E0=0,1 В, а коэффициент передачи сумматора по четвертому входу k4=0,1. На фиг. 3, в и фиг. 3, г показаны графики для случая, когда величина опорного напряжения E0=0,8 В, а коэффициент передачи сумматора по четвертому входу k4=1,0. На фиг. 3, д и фиг. 3, е показаны графики для случая, когда величина опорного напряжения Е0=0,9 В, а коэффициент передачи сумматора по четвертому входу k4=10,0.
Выбор наилучшего сочетания длительности TИ корректирующего сигнала Sk(t) и коэффициента передачи k4 сумматора 7 по четвертому входу позволил минимизировать длительность переходного процесса при запуске управляемого генератора квадратурных сигналов, а наличие делителей 10 и 11 позволило дополнительно стабилизировать амплитуды выходных сигналов N1(t) и N2(t). Следует отметить, что сигнал Sk(t) формируется только один раз при запуске генератора и в дальнейшей работе управляемого генератора участия не принимает.
Использование предлагаемого изобретения позволит повысить (по сравнению с аналогами и прототипом) спектральную чистоту формируемых квадратурных гармонических сигналов.
Источники информации
1. Вавилов А.А., Солодовников А.И. Экспериментальное определение частотных характеристик автоматических систем. M.-Л.: Госэнергоиздат, 1963 г. - 252 с.
2. Вавилов А.А., Солодовников А.И., Шнайдер В.В. Низкочастотные измерительные генераторы. - Л.: Энергоатомиздат, Ленингр. отделение, 1985 г. - 104 с.
3. Патент РФ №2506692, H03B 27/00. Дубровин B.C. Управляемый генератор, заявл. 31.08.2012, опубл. 10.02.2014. Бюл. №4.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ | 2014 |
|
RU2565362C1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2013 |
|
RU2541147C1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР | 2012 |
|
RU2506692C1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2013 |
|
RU2534939C1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ | 2015 |
|
RU2582556C1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2014 |
|
RU2554571C1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2015 |
|
RU2582557C1 |
| МНОГОЧАСТОТНЫЙ ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2013 |
|
RU2534938C1 |
| Формирователь сигнала треугольной формы | 2016 |
|
RU2622866C1 |
| Формирователь сигнала треугольной формы | 2016 |
|
RU2628434C1 |
Изобретение относится к радиотехнике и связи и может быть использовано при построении управляемых генераторов. Техническим результатом является повышение спектральной чистоты формируемых квадратурных гармонических сигналов. Устройство содержит два умножителя, два интегратора, два квадратора, два сумматора, инвертор, два делителя, блок извлечения квадратного корня, компаратор, источник опорного напряжения. 3 ил.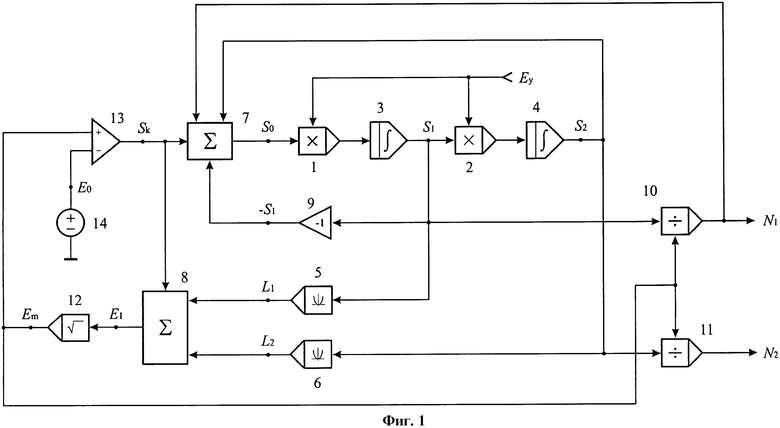
Управляемый генератор квадратурных сигналов, содержащий первый и второй умножители, первый и второй интеграторы, первый и второй квадраторы, первый и второй сумматоры и инвертор, при этом первый квадратор включен между выходом первого интегратора и первым входом второго сумматора, второй квадратор включен между выходом второго интегратора и вторым входом второго сумматора, к выходу первого сумматора подключен первый вход первого умножителя, выход которого соединен с входом первого интегратора, к выходу которого подключен первый вход второго умножителя, выход которого соединен с входом второго интегратора, выход которого соединен со вторым входом первого сумматора, при этом вторые входы первого и второго умножителей соединены с управляющей шиной, отличающийся тем, что в него дополнительно введены первый и второй делители, блок извлечения квадратного корня, компаратор и источник опорного напряжения, минусовой зажим которого соединен с общей шиной, а плюсовой - с инвертирующим входом компаратора, выход которого соединен с четвертым входом первого сумматора и третьим входом второго сумматора, между выходом которого и неинвертирующим входом компаратора включен блок извлечения квадратного корня, при этом инвертор включен между выходом первого интегратора и третьим входом первого сумматора, первый вход которого соединен с выходом первого делителя и первым выходом управляемого генератора квадратурных сигналов, второй выход которого соединен с выходом второго делителя, первый вход которого подключен к выходу второго интегратора, причем выход блока извлечения квадратного корня соединен со вторыми входами первого и второго делителей, а первый вход первого делителя подключен к выходу первого интегратора.
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР | 2012 |
|
RU2506692C1 |
| Способ высадки труб без матриц | 1955 |
|
SU104402A1 |
| Генератор квадратурных сигналов | 1982 |
|
SU1107263A1 |
| Двухфазный генератор гармонических сигналов | 1981 |
|
SU1084941A1 |
| US 2012126903 A1, 24.05.2012 | |||
| WO 03069769 A2, 21.08.2003 | |||
| WO 9729545 A1, 14.08.1997 | |||

