ОБЛАСТЬ ТЕХНИКИ
Описанные варианты осуществления касаются способов и устройств для использования в продвижении зонда. В частности, варианты осуществления могут использоваться для продвижения зонда по поверхности или в тракте, таком как тракт биологического объекта.
УРОВЕНЬ ТЕХНИКИ
Исследование трактов, узких пространств или областей, подход к которым затруднен, может представлять сложность. Это в особенности касается ситуации, при которой может быть затруднен соответствующий контроль продвижения зонда. Например, кишечники часто имеют относительно большую длину и образуют извилистый путь, по которому зонду трудно пройти без помощи какого-либо устройства, способствующего продвижению зонда.
Тракты, такие как кишечные и сосудистые тракты, можно с успехом исследовать, используя зонд, предназначенный для медицинских целей.
Желательно обозначить и преодолеть некоторые недостатки и неудобства, связанные с существующими способами и/или устройствами для продвижения зондов, или по меньшей мере предложить полезную альтернативу таковым.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Некоторые варианты осуществления касаются устройства, содержащего:
удлиненную гибкую трубку, выполненную с возможностью размещения в тракте и имеющую проксимальный конец и дистальный конец;
приводной механизм, соединенный с проксимальным концом этой трубки; а также
столб жидкости, продолжающийся от проксимального конца до дистального конца;
при этом приводной механизм выполнен с возможностью вызывать перемещение столба жидкости в трубке для придания трубке импульса движения вперед и тем самым содействовать продвижению по меньшей мере дистального конца трубки в тракте, когда по меньшей мере дистальный конец размещен в пределах части тракта.
Столб жидкости может представлять собой часть объема жидкости, заключенного в трубке и приводном механизме. Трубка может иметь периодические отклонения формы, созданные на наружной поверхности трубки вдоль по меньшей мере части дистального конца. Периодические отклонения формы могут продолжаться по окружности трубки и могут иметь радиальное отклонение величиной порядка радиальной толщины стенки трубки.
Наружная поверхность трубки может быть выполнена с возможностью увеличения сопротивления перемещению трубки в обратном направлении. Внутренняя поверхность трубки может быть выполнена с возможностью увеличения сопротивления перемещению столба через трубку в направлении вперед. Наружная и внутренняя поверхности трубки (т.е. периодические отклонения формы) могут быть выполнены по проксимально обращенной схеме «елочки». Внутренние периодические отклонения формы могут быть выполнены вдоль по меньшей мере секции трубки, дистальной по отношению к проксимальному концу.
Жидкость или столб жидкости может иметь плотность, примерно равную плотности воды или превышающую ее, чтобы жидкость сжималась минимально, когда на столб жидкости воздействует приводной механизм.
Приводной механизм может быть выполнен с возможностью придания проксимальному концу столба жидкости скорости определенного профиля для усиления перемещения вперед трубки в тракте. Профиль скорости может содержать одну или несколько из составляющих:
участок постепенного ускорения в первой части перемещения вперед столба жидкости;
участок резкого снижения скорости во второй части перемещения вперед столба жидкости, которая следует за первой частью перемещения вперед;
участок резкого ускорения в первой части перемещения назад столба жидкости; а также
участок постепенного снижения скорости во второй части перемещения назад столба жидкости, которая следует за первой частью перемещения назад.
Приводной механизм может содержать поршень и ведущее звено, такое как вал, выполненное с возможностью вызывать повторяющиеся продвижение вперед и отвод назад столба жидкости в трубке. Приводной механизм может быть выполнен с возможностью заставлять поршень резко снижать скорость к концу каждого хода поршня и/или резко ускоряться от конца каждого хода поршня.
Устройство может дополнительно содержать гибкую мембрану в трубке на дистальном конце для замыкания дистального конца столба жидкости. Дистальный конец трубки может вмещать в себя некоторый объем сжимаемой текучей среды (например, воздуха или иного инертного газа малой плотности), ограничиваемый трубкой, гибкой мембраной и другой мембраной, расположенной дистально от гибкой мембраны. Другая мембрана также может быть гибкой, при этом обе мембраны способны упруго деформироваться в ответ на продвижение столба жидкости.
Внутренний диаметр трубки может уменьшаться в дистальном направлении. Такое уменьшение может быть ступенчатым и/или плавным. Это сужение может способствовать минимизации потери давления в столбе жидкости в направлении дистального конца по мере того как приводной механизм перемещает столб жидкости. Стенки трубки могут быть усилены с помощью некоторого средства армирования, чтобы способствовать сопротивлению трубки расширению или сжатию в ответ на перепады давления, создаваемые работой приводного механизма.
Зонд может располагаться на дистальном конце трубки. Зонд может вмещать в себя устройство для визуализации, предназначенное для сбора изображений области впереди зонда. Множество каналов могут продолжаться вдоль трубки и соединяться с зондом, например, для подачи и/или приема сигналов на зонд и/или от зонда. Каналы могут размещаться в трубке вдоль по меньшей мере части трубки. По меньшей мере один из каналов может продолжаться по спирали вдоль по меньшей мере части трубки. В некоторых вариантах осуществления вспомогательная полость может продолжаться в основной полости, определяемой трубкой, при этом один или несколько каналов могут продолжаться во вспомогательной полости вдоль по меньшей мере части трубки. В некоторых вариантах осуществления один или несколько каналов могут быть встроены в стенку трубки вдоль по меньшей мере части трубки.
Тракт, внутри которого трубка должна иметь возможность прохождения, может представлять собой, например, желудочно-кишечный тракт или сосудистый тракт. Согласно альтернативному варианту тракт может быть небиологической структурой или областью, такой как трубопровод, водовод, контейнер или иная конструкция, получить доступ к которой и/или обследовать которую человеку может быть трудно или опасно.
Дополнительные варианты осуществления касаются способа продвижения зонда, при этом способ включает:
расположение дистального конца удлиненной гибкой трубки по меньшей мере частично в пределах нижнего конца тракта, при этом трубка выполнена с возможностью размещения в тракте и содержит столб жидкости, продолжающийся от проксимального конца трубки до дистального конца, причем зонд расположен на дистальном конце трубки; а также
управление приводным механизмом, чтобы вызвать продвижение столба жидкости в трубке для придания трубке импульса движения вперед и тем самым содействовать продвижению по меньшей мере дистального конца трубки в тракте.
Этап управления может включать придание проксимальному концу столба жидкости скорости определенного профиля для усиления перемещения вперед трубки в тракте. Профиль скорости может содержать одну или несколько из составляющих:
участок постепенного ускорения в первой части перемещения вперед столба жидкости;
участок резкого снижения скорости во второй части перемещения вперед столба жидкости, которая следует за первой частью перемещения вперед;
участок резкого ускорения в первой части перемещения назад столба жидкости; а также
участок постепенного снижения скорости во второй части перемещения назад столба жидкости, которая следует за первой частью перемещения назад.
Этап управления может включать управление поршнем или ведущим валом, чтобы вызывать повторяющиеся продвижение вперед и отвод назад столба жидкости в трубке. Управление может заставлять поршень резко снижать скорость к концу каждого хода поршня (т.е. непосредственно до точки максимального хода). Управление может заставлять поршень резко ускоряться от конца каждого хода поршня (т.е. непосредственно после точки максимального хода).
Способ может дополнительно включать создание контура по наружной поверхности трубки для сопротивления перемещению трубки во встречном направлении в тракте, а также может включать создание контура по внутренней поверхности трубки для сопротивления перемещению столба жидкости через трубку в дистальном направлении.
Зонд может содержать устройство для визуализации, а способ может дополнительно включать сбор изображений в тракте с использованием устройства для визуализации. Способ может дополнительно содержать передачу данных изображения, соответствующих собранным изображениям, на систему, выполненную с возможностью обработки и вывода на экран изображений. Каналы, включая по меньшей мере один электрический канал, могут продолжаться вдоль трубки для выполнения по меньшей мере одного из действий по подаче и приему сигналов на зонд или от зонда, при этом передача может выполняться с использованием по меньшей мере одного электрического канала.
Некоторые варианты осуществления касаются способа продвижения, включающего создание возвратно-поступательного перемещения столба жидкости, продолжающегося внутри удлиненного звена от одного конца звена до противоположного конца звена, для придания перемещения вперед звену вдоль длины удлиненного звена.
Некоторые варианты осуществления касаются устройства, содержащего зонд, расположенный на одном конце удлиненного звена, а также приводной механизм на противоположном конце удлиненного звена, при этом удлиненное звено содержит столб жидкости, продолжающийся от одного конца до противоположного конца, причем приводной механизм вызывает возвратно-поступательное перемещение столба жидкости в удлиненном звене для придания зонду перемещения вперед.
Некоторые варианты осуществления касаются сменного самопродвигающегося блока трубки, содержащего удлиненную гибкую трубку, жидкостную камеру, расположенную на проксимальном конце трубки, а также зонд, расположенный на дистальном конце трубки, при этом в трубке имеется столб жидкости, продолжающийся между жидкостной камерой и дистальным концом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже подробно описаны варианты осуществления в виде примеров со ссылкой на прилагаемые чертежи, где:
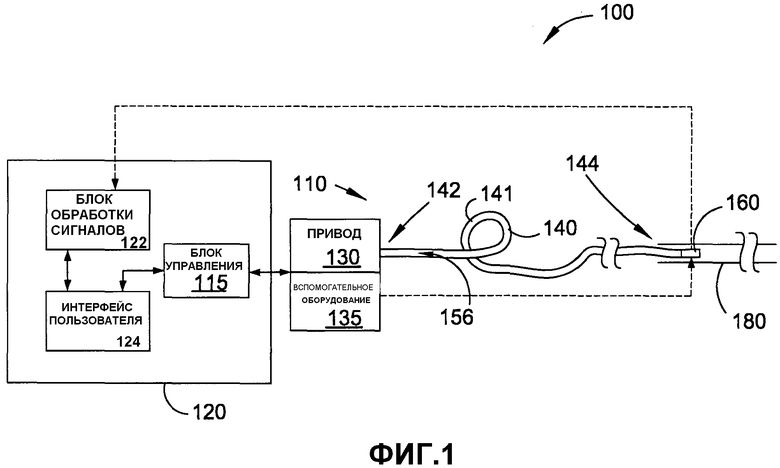
на фиг. 1 показана структурная схема системы, используемой для продвижения зонда в тракте;
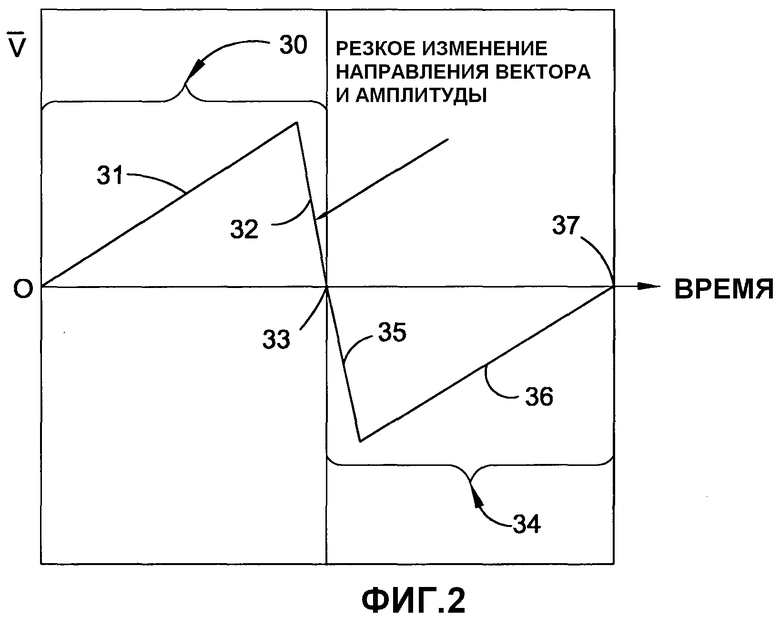
на фиг. 2 показан график иллюстративного профиля скорости, сообщаемой столбу жидкости;
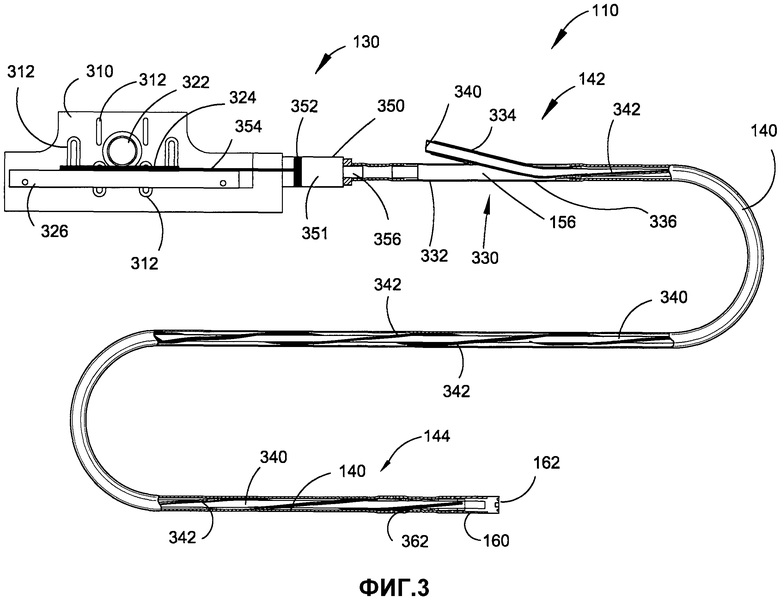
на фиг. 3 схематично представлено устройство для продвижения, используемое для продвижения зонда;
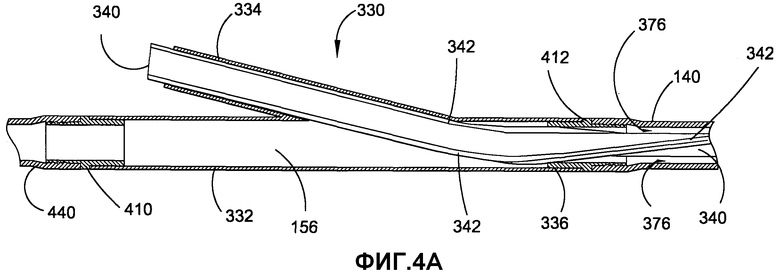
на фиг. 4А схематично показан вид сбоку в сечении проксимального участка трубки, образующей часть устройства для продвижения, представленного на фиг. 3;
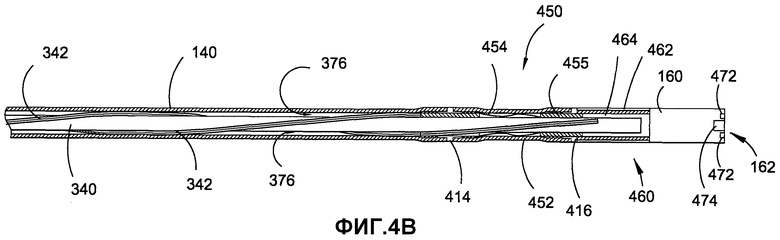
на фиг. 4В схематично показан вид сбоку в сечении дистального участка трубки, образующей часть устройства для продвижения, представленного на фиг. 3;
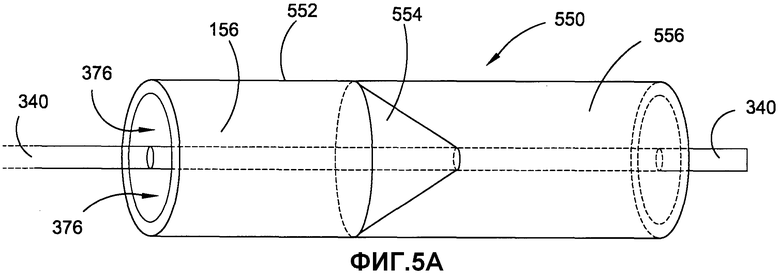
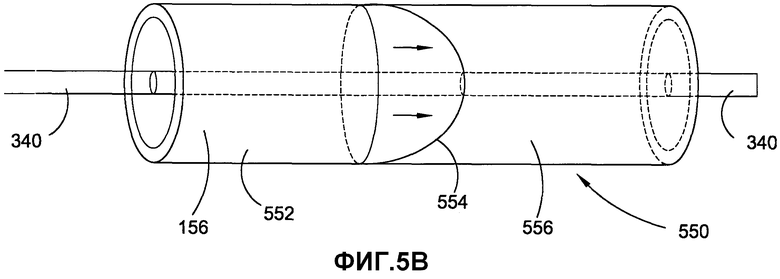
на фиг. 5А схематично показан пример гибкой мембраны, расположенной в направлении дистального конца устройства для продвижения, при этом мембрана показана в положении релаксации;
на фиг. 5В показана примерная схема мембраны, представленной на фиг. 5А, при этом мембрана показана в деформированном положении;
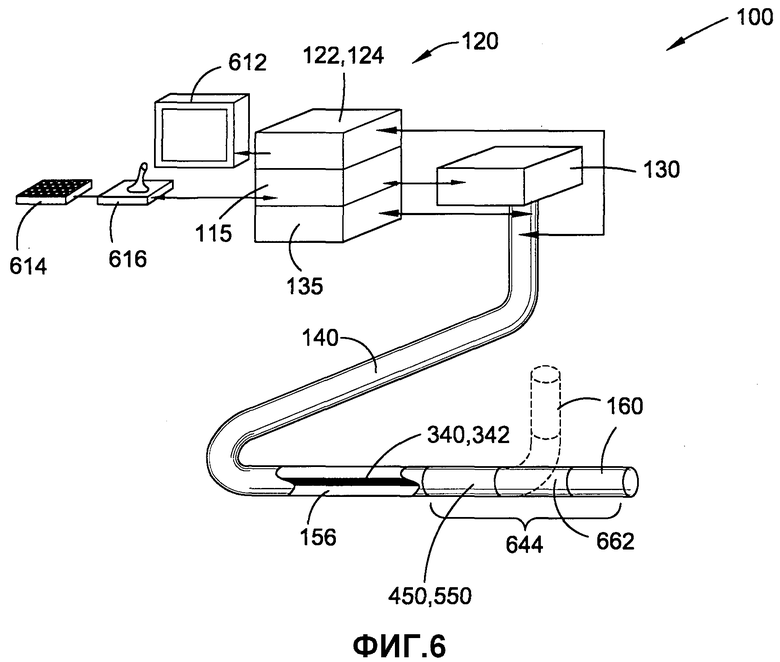
на фиг. 6 показана схема системы для продвижения зонда согласно некоторым вариантам осуществления;
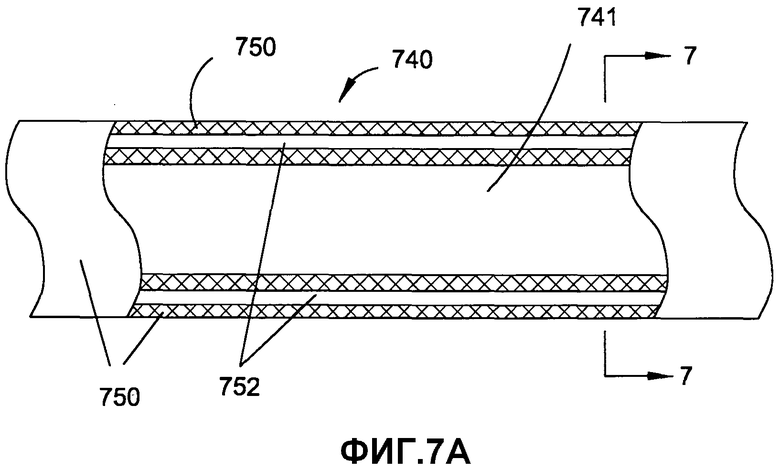
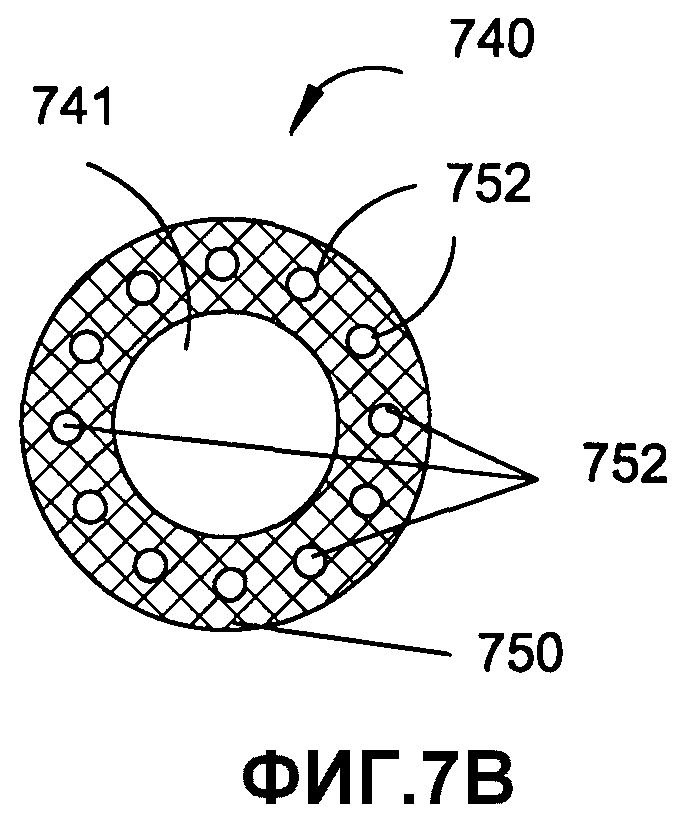
на фиг. 7А показан вид сбоку, частично в сечении, трубки согласно некоторым вариантам осуществления;
на фиг. 7В показан вид в сечении трубки, представленной на фиг. 7А, по линии 7-7;
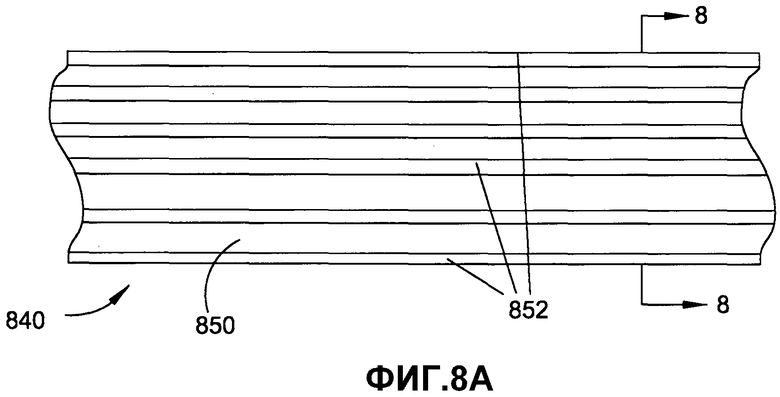
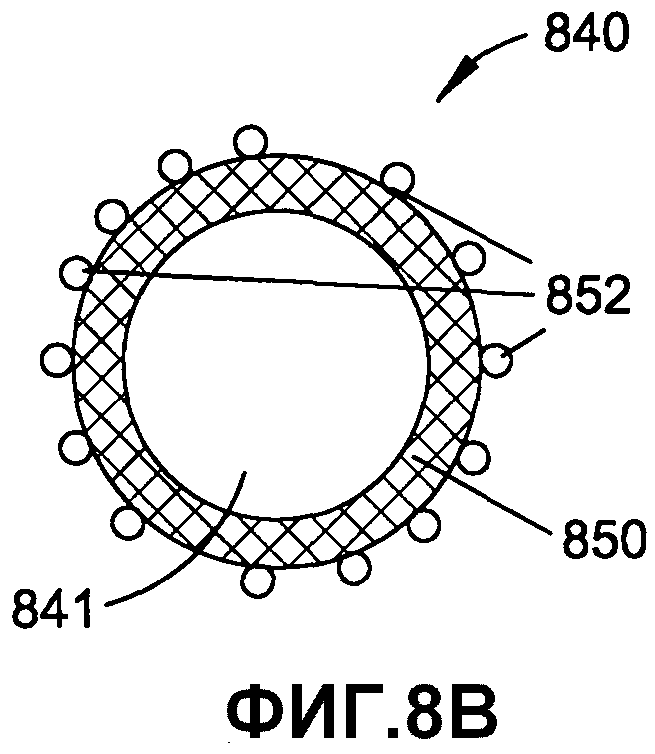
на фиг. 8А показан вид сбоку трубки согласно некоторым вариантам осуществления;
на фиг. 8В показан вид в сечении трубки, представленной на фиг. 8А, по линии 8-8;
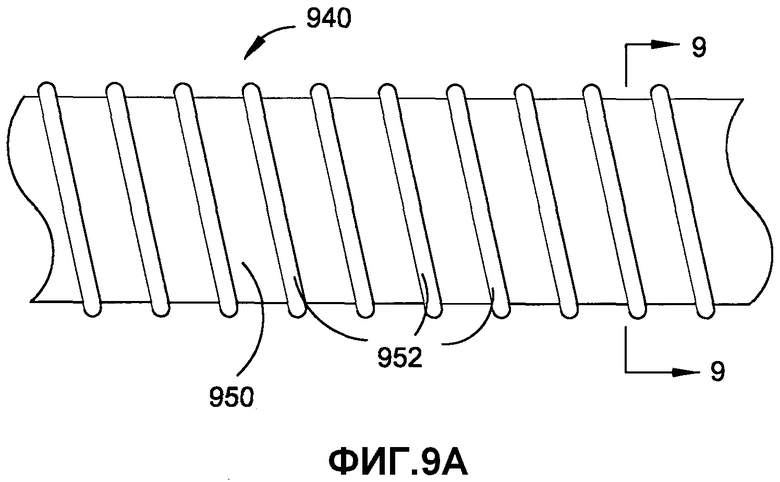
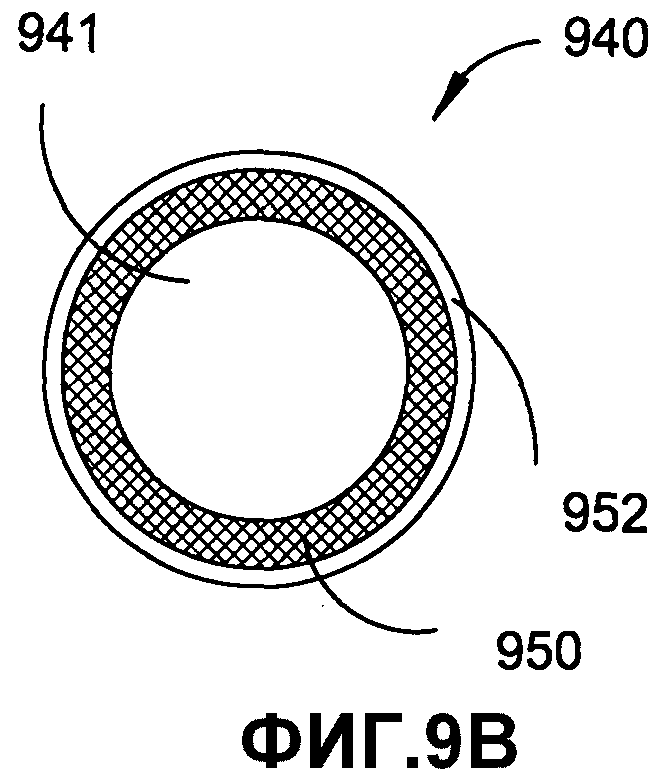
на фиг. 9А показан вид сбоку трубки согласно некоторым вариантам осуществления;
на фиг. 9В показан вид в сечении трубки, представленной на фиг. 9А, по линии 9-9;
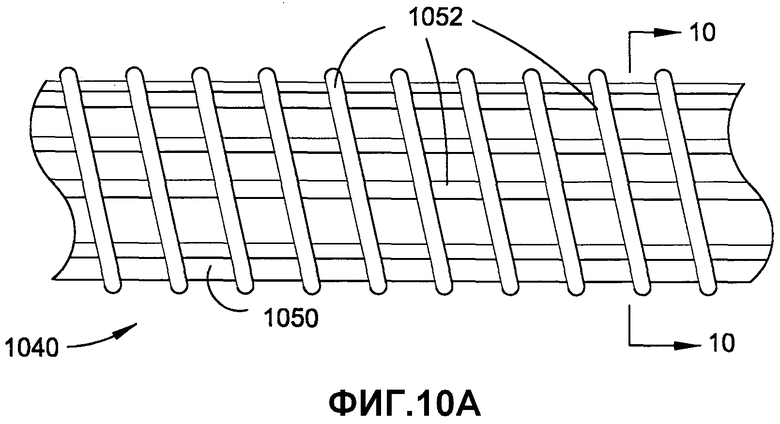
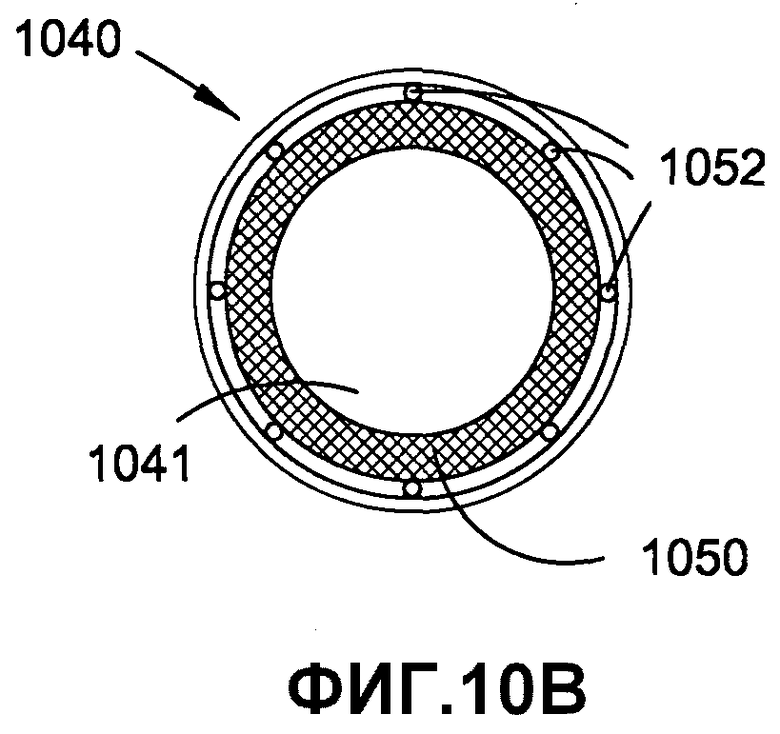
на фиг. 10А показан вид сбоку трубки согласно некоторым вариантам осуществления;
на фиг. 10В показан вид в сечении трубки, представленной на фиг. 10А, по линии 10-10;
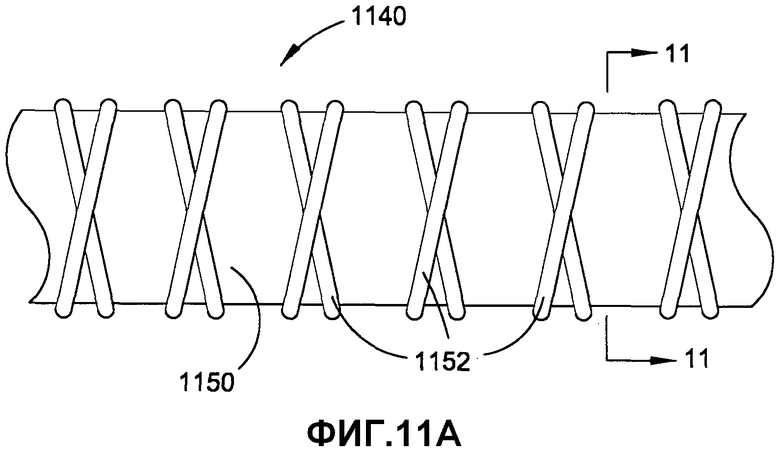
на фиг. 11А показан вид сбоку трубки согласно некоторым вариантам осуществления;
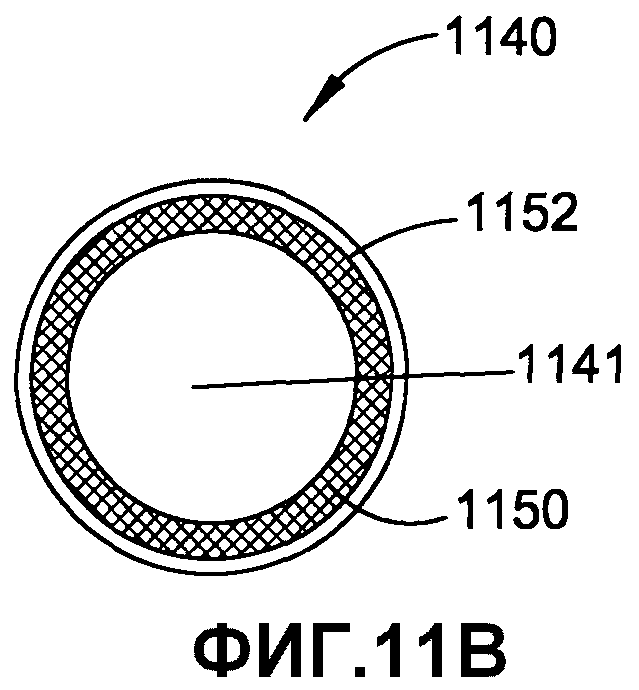
на фиг. 11В показан вид в сечении трубки, представленной на фиг. 11А, по линии 11-11;
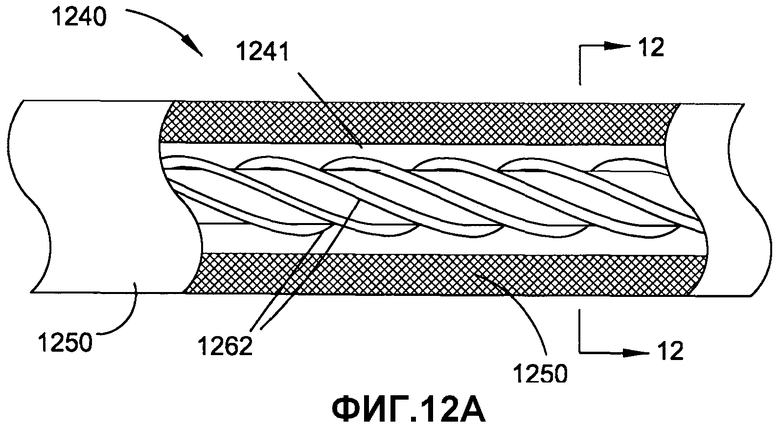
на фиг. 12А показан вид сбоку, частично в сечении, трубки согласно некоторым вариантам осуществления;
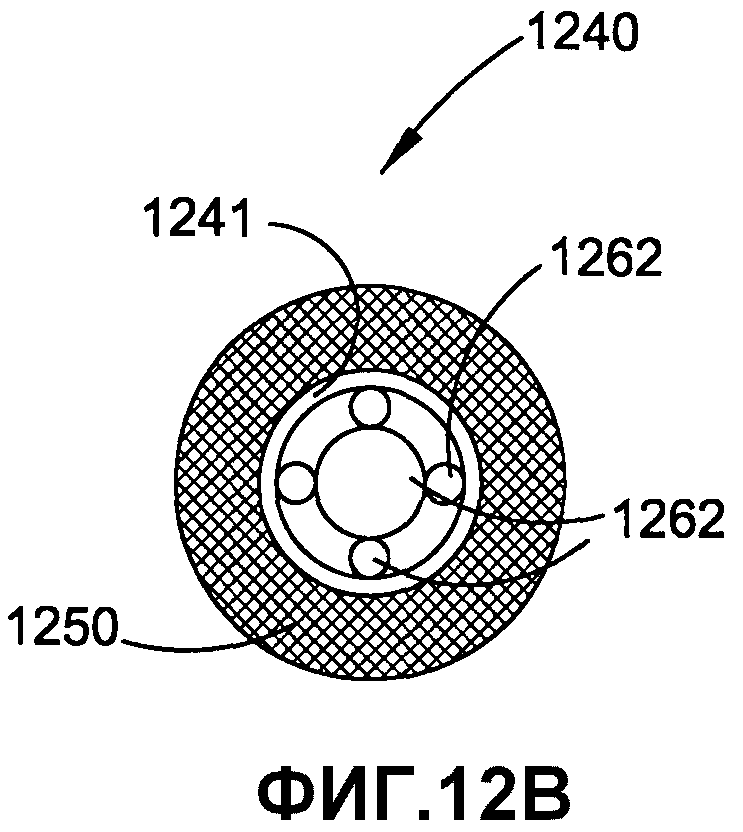
на фиг. 12В показан вид в сечении трубки, представленной на фиг. 12А, по линии 12-12;
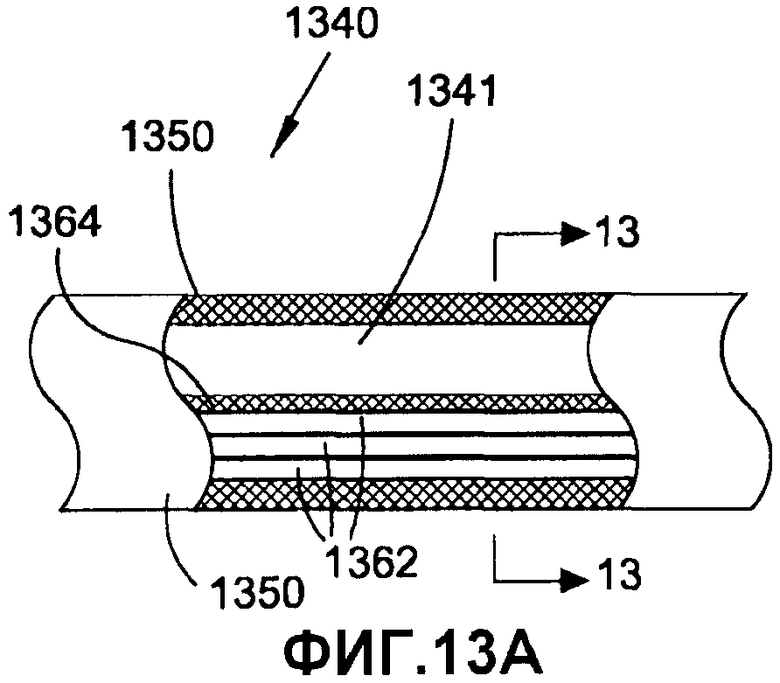
на фиг. 13А показан вид сбоку, частично в сечении, трубки согласно некоторым вариантам осуществления;
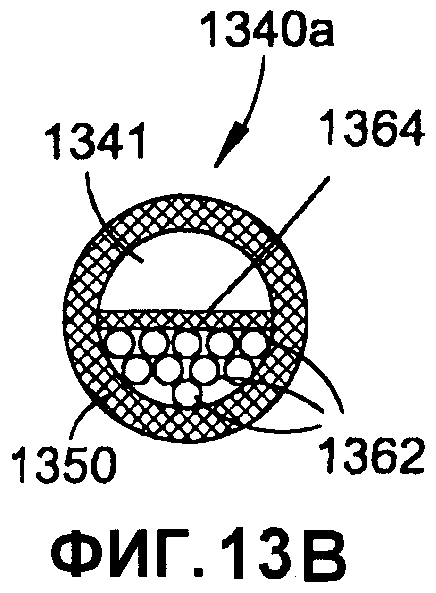
на фиг. 13В показан вид в сечении трубки, представленной на фиг. 13А, по линии 13-13;
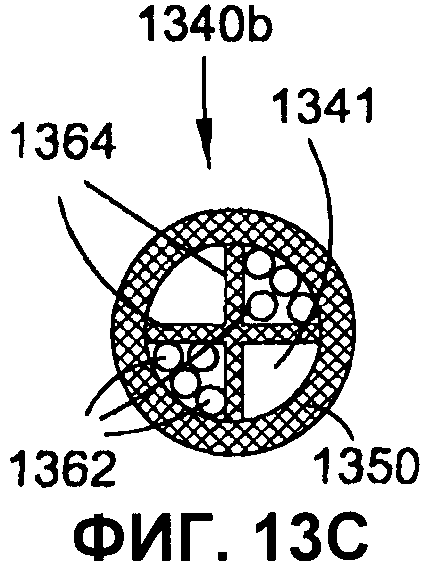
на фиг. 13С показан альтернативный вид в сечении трубки, представленной на фиг. 13А, по линии 13-13;
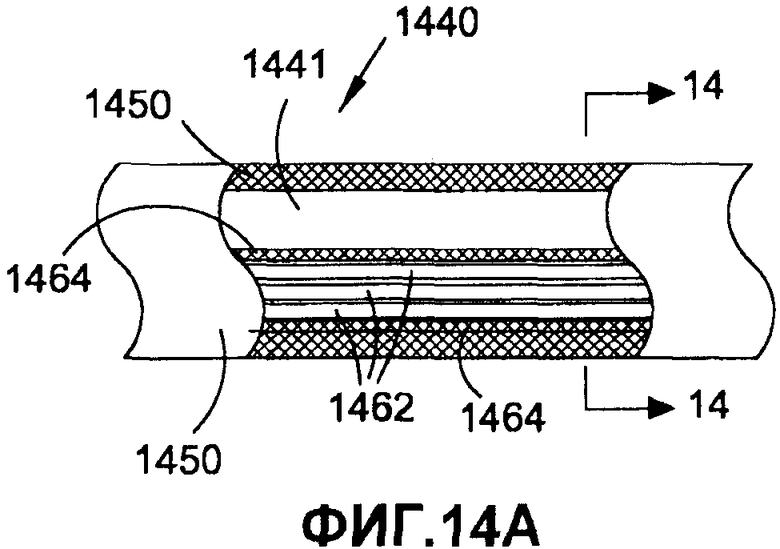
на фиг. 14А показан вид сбоку, частично в сечении, трубки согласно некоторым вариантам осуществления;
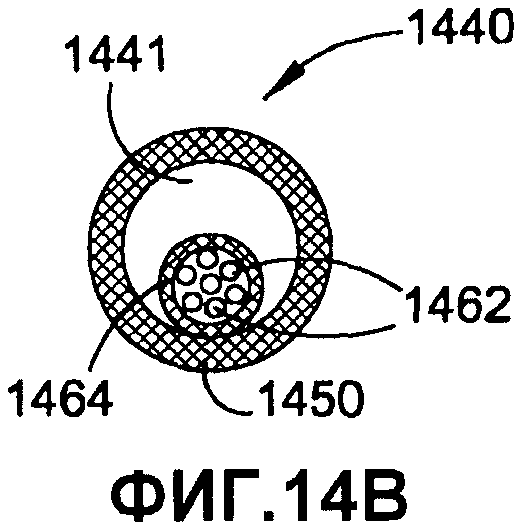
на фиг. 14В показан вид в сечении трубки, представленной на фиг. 14А, по линии 14-14;
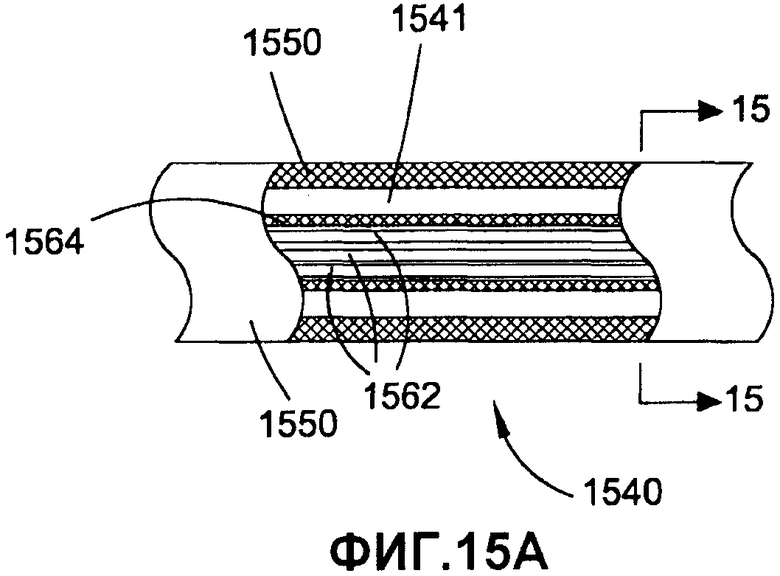
на фиг. 15А показан вид сбоку, частично в сечении, трубки согласно некоторым вариантам осуществления;
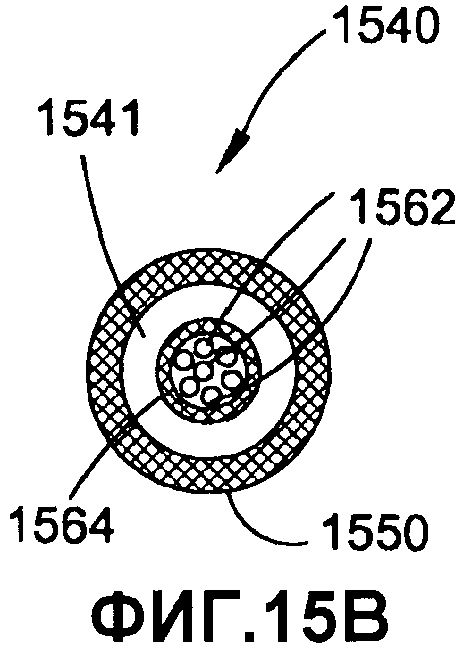
на фиг. 15В показан вид в сечении трубки, представленной на фиг. 15А, по линии 15-15;
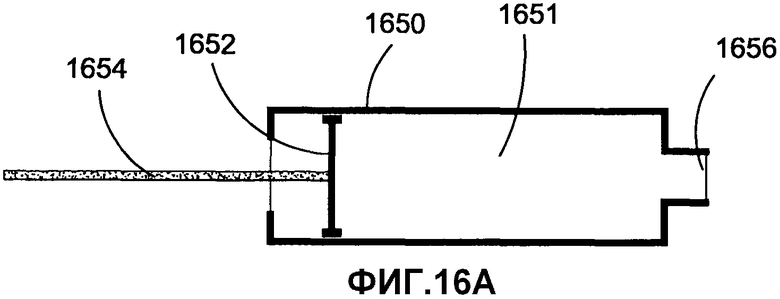
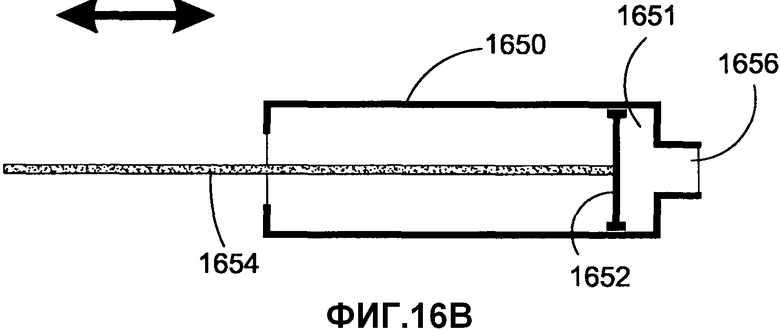
на фиг. 16А и 16В схематично представлен поршень, перемещающийся в камере согласно некоторым вариантам выполнения приводного механизма;
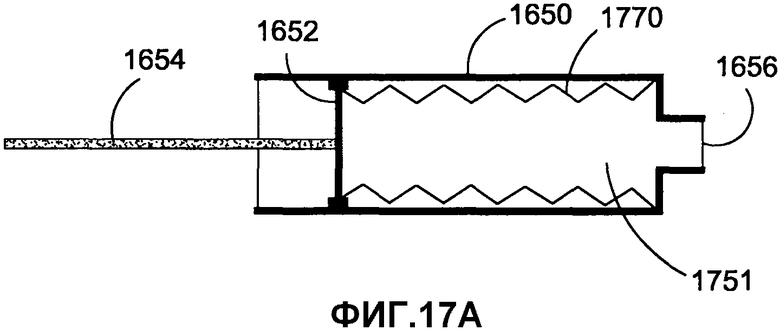
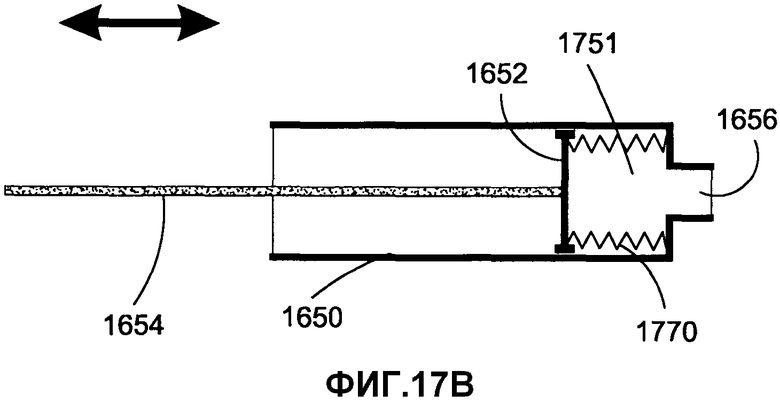
на фиг. 17А и 17В схематично представлен поршень, перемещающийся в камере согласно некоторым вариантам выполнения приводного механизма;
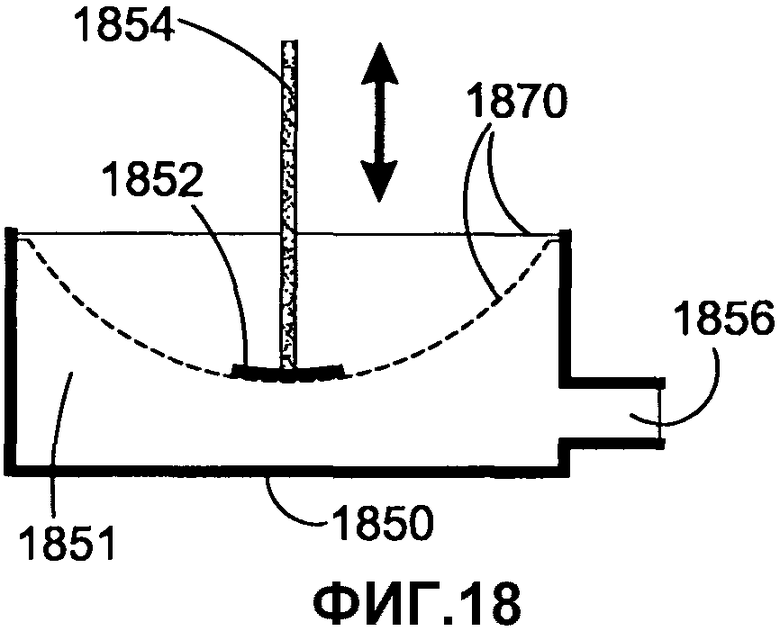
на фиг. 18 схематично представлен поршень, воздействующий на гибкую мембрану жидкостной камеры согласно некоторым вариантам выполнения приводного механизма;
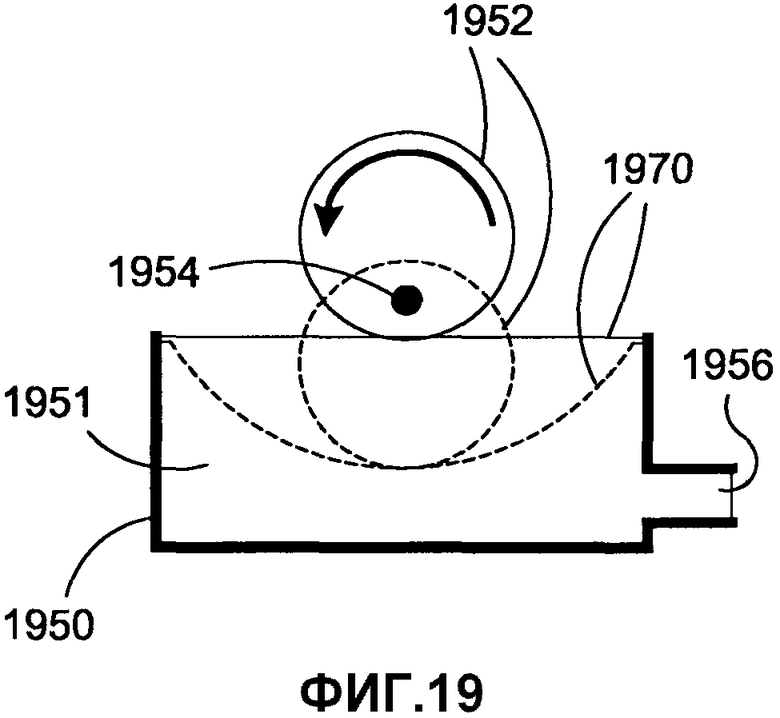
на фиг. 19 схематично представлен поршень круглого сечения, который по существу способен вращаться для смещения мембраны жидкостной камеры согласно некоторым вариантам выполнения приводного механизма;
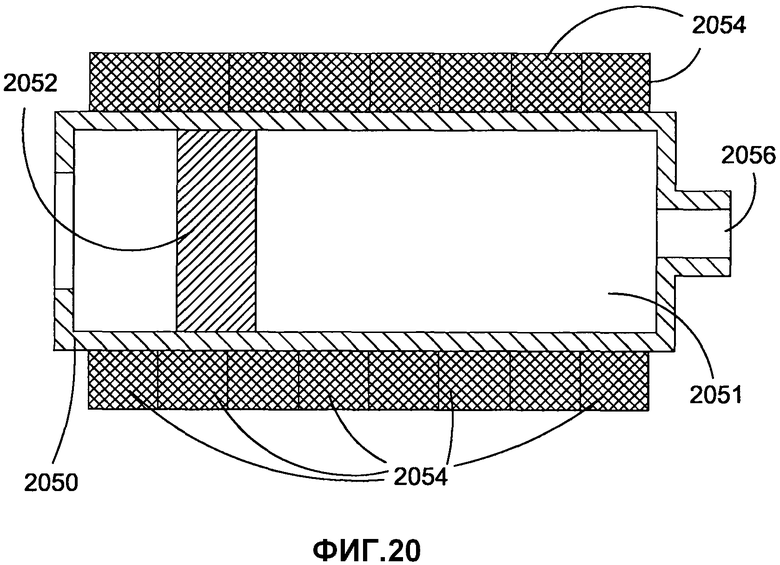
на фиг. 20 схематично представлена жидкостная камера, имеющая поршень, способный перемещаться в камере под управлением электромагнитных элементов, согласно некоторым вариантам выполнения приводного механизма;
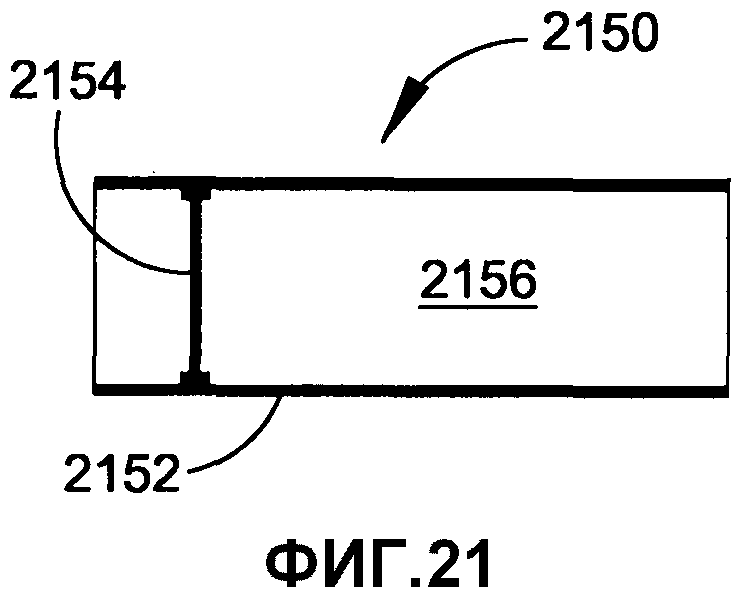
на фиг. 21 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления;
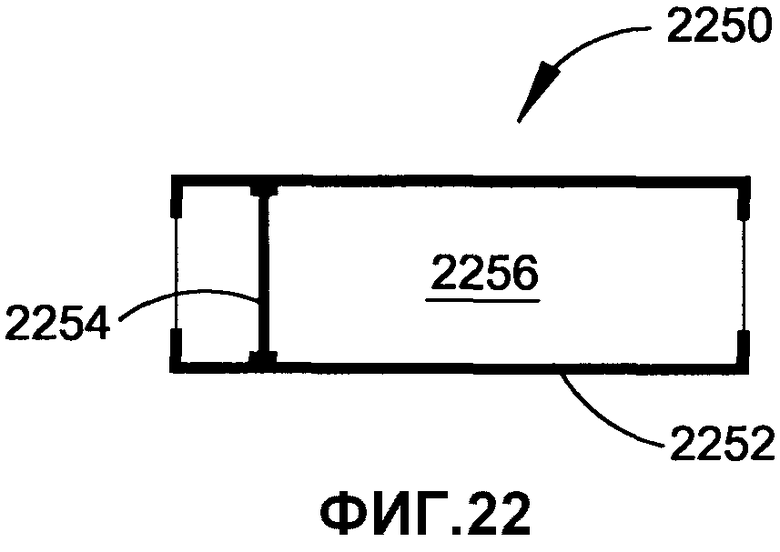
на фиг. 22 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления;
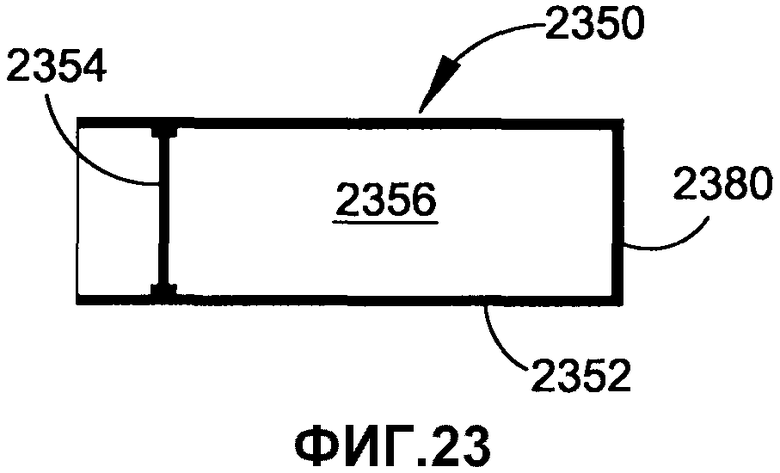
на фиг. 23 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления;
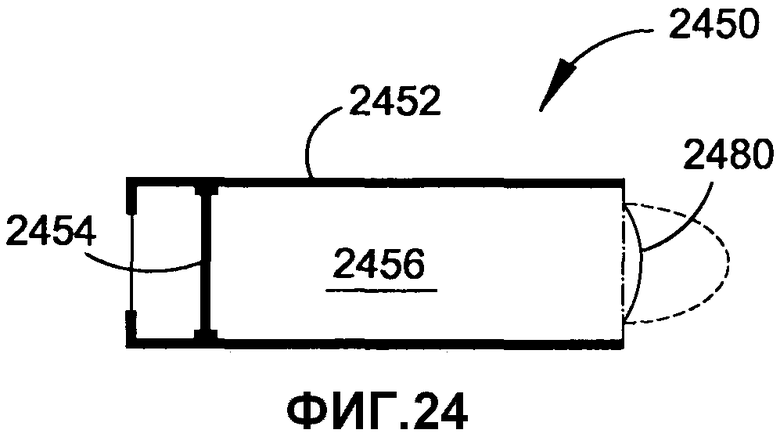
на фиг. 24 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления;
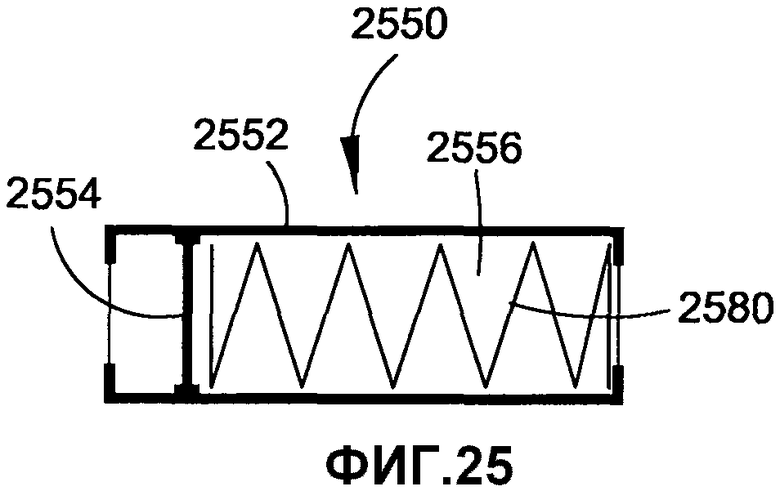
на фиг. 25 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления, показанная в несжатом состоянии;
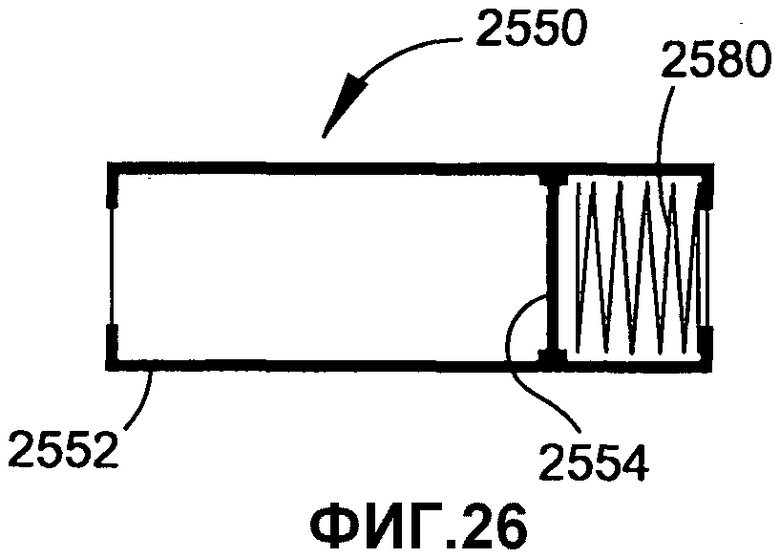
на фиг. 26 схематично представлена дистальная камера смещения, показанная на фиг. 25, в сжатом состоянии;
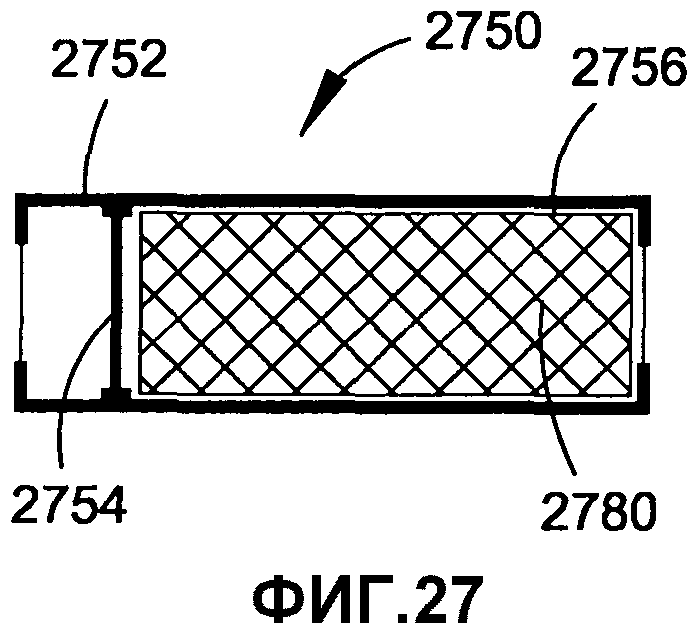
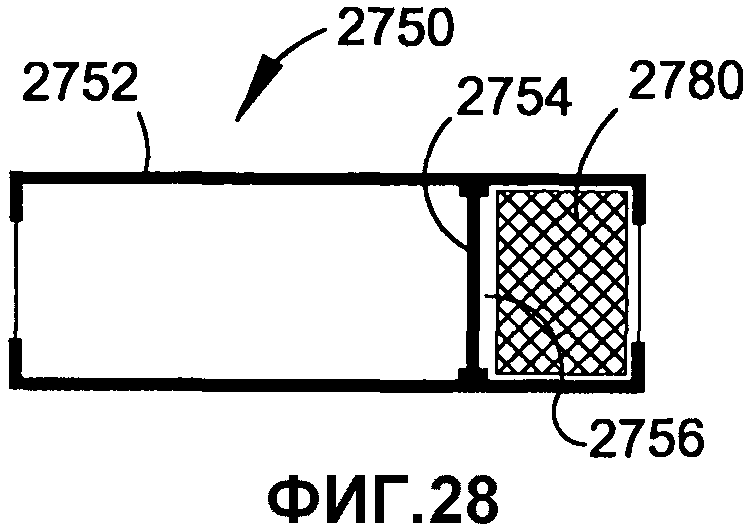
на фиг. 27 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления, показанная в несжатом состоянии;
на фиг. 28 схематично представлена дистальная камера смещения, показанная на фиг. 27, в сжатом состоянии;
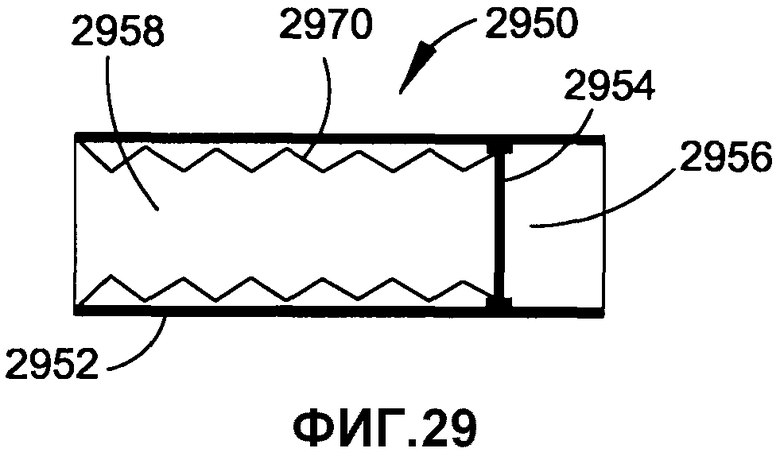
на фиг. 29 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления;
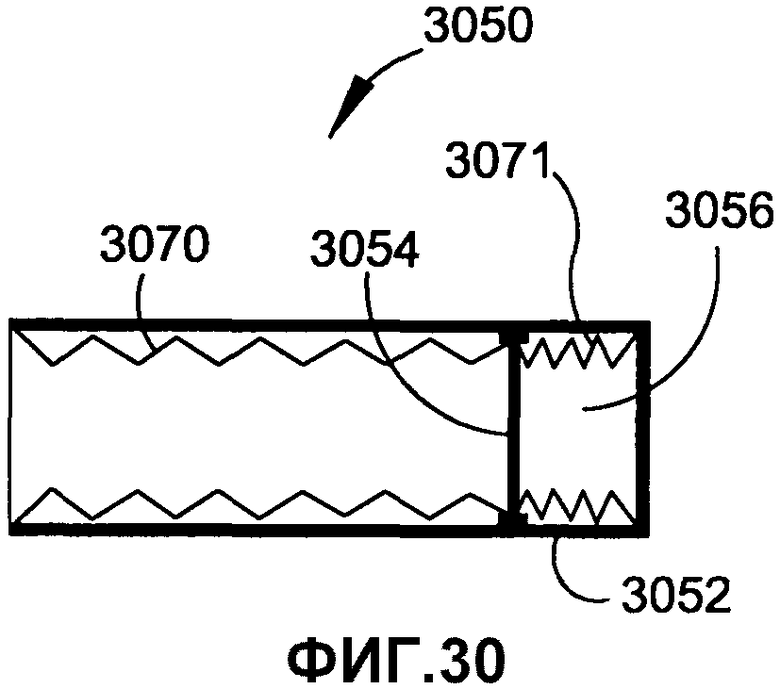
на фиг. 30 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления;
на фиг. 31 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления;
на фиг. 32 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления, показанная в несжатом состоянии;
на фиг. 33 схематично представлена дистальная камера смещения, показанная на фиг. 32, в сжатом состоянии;
на фиг. 34 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления, показанная в несжатом состоянии;
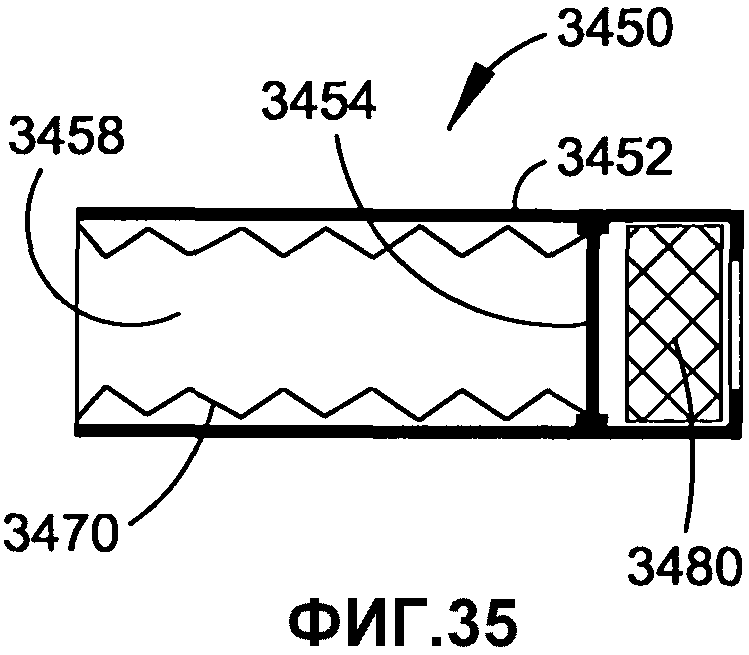
на фиг. 35 схематично представлена дистальная камера смещения, показанная на фиг. 34, в сжатом состоянии;
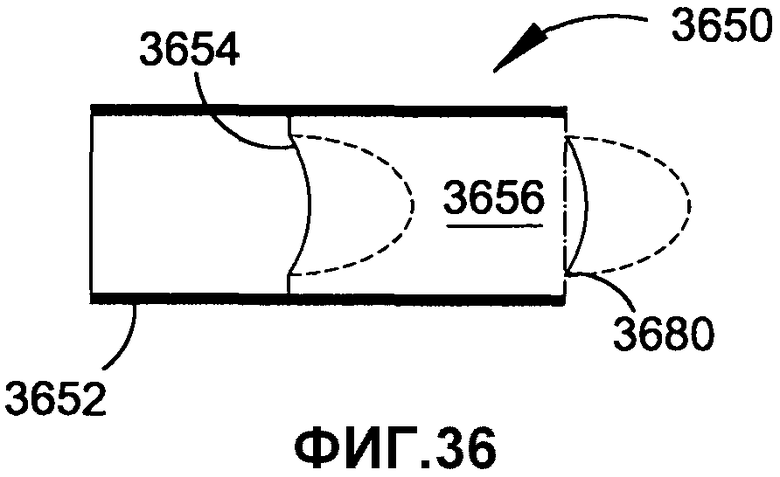
на фиг. 36 схематично представлена дистальная камера смещения согласно некоторым вариантам осуществления;
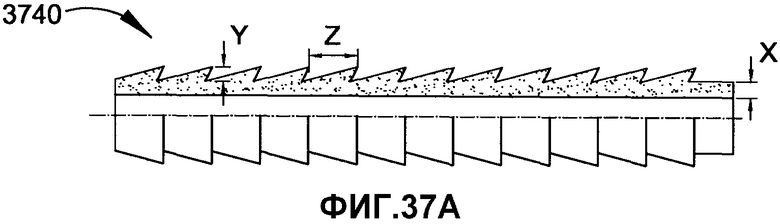
на фиг. 37А показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль наружной поверхности трубки;
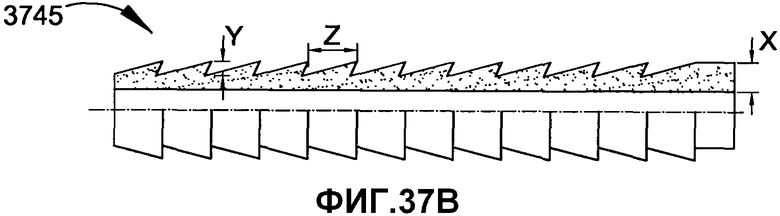
на фиг. 37В показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль наружной поверхности трубки;
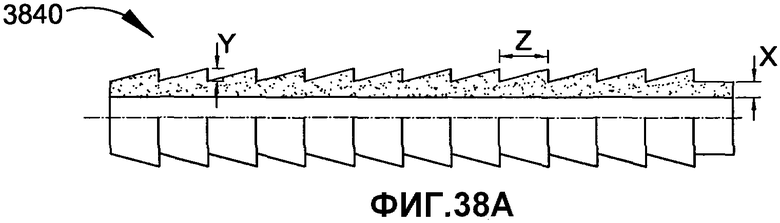
на фиг. 38А показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль наружной поверхности трубки;
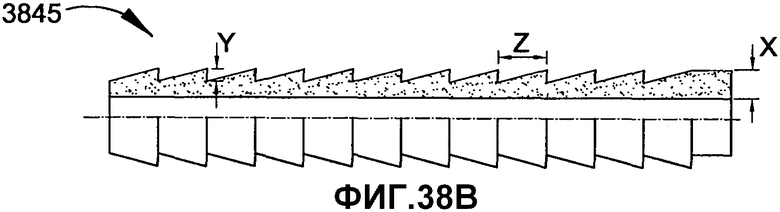
на фиг. 38В показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль наружной поверхности трубки;
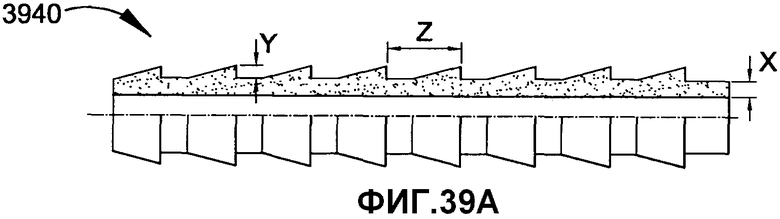
на фиг. 39А показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль наружной поверхности трубки;
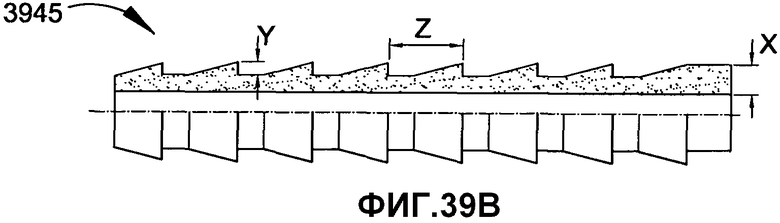
на фиг. 39В показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль наружной поверхности трубки;
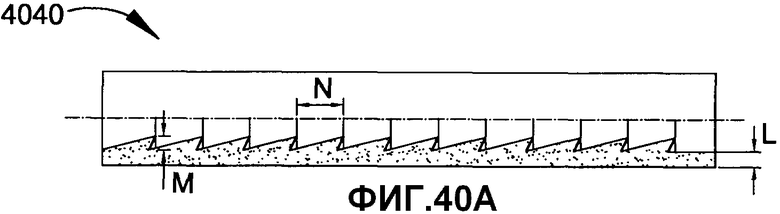
на фиг. 40А показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль внутренней поверхности трубки;
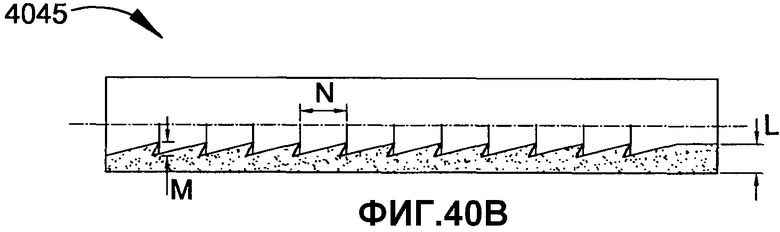
на фиг. 40В показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль внутренней поверхности трубки;
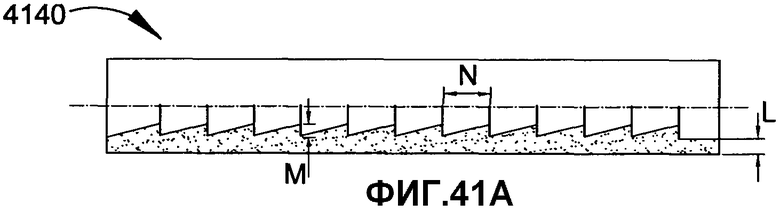
на фиг. 41А показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль внутренней поверхности трубки;
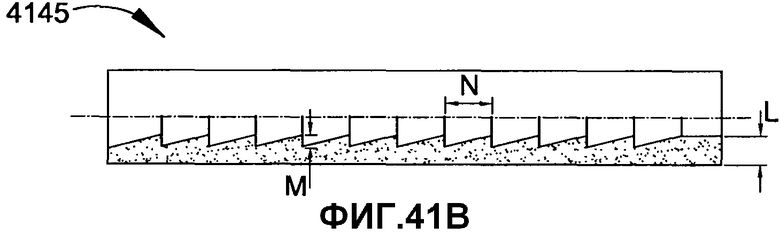
на фиг. 41В показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль внутренней поверхности трубки;
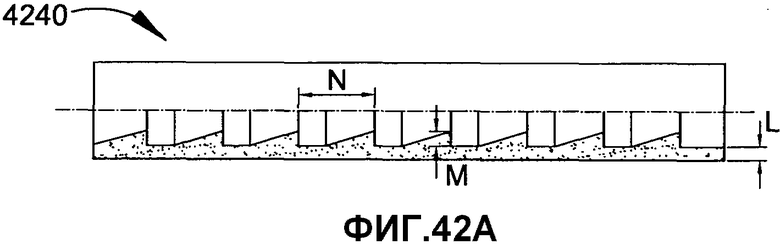
на фиг. 42А показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль внутренней поверхности трубки;
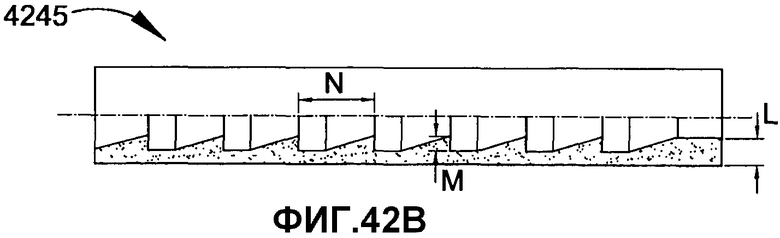
на фиг. 42В показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль внутренней поверхности трубки;
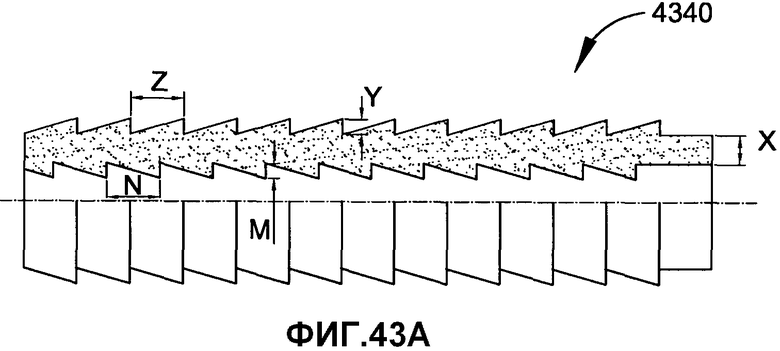
на фиг. 43А показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль как внутренней, так и наружной поверхности трубки;
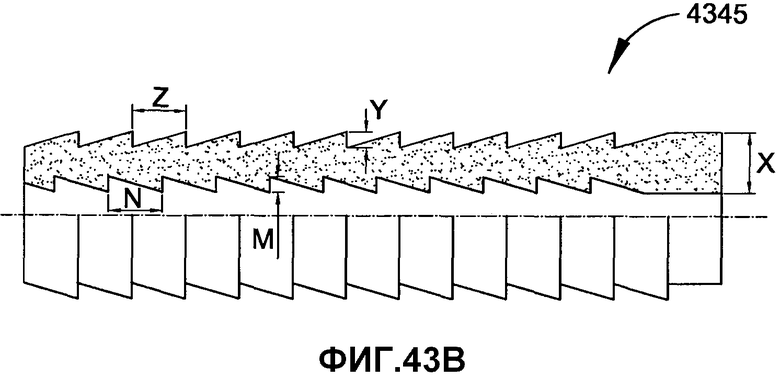
на фиг. 43В показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль как внутренней, так и наружной поверхности трубки; а также
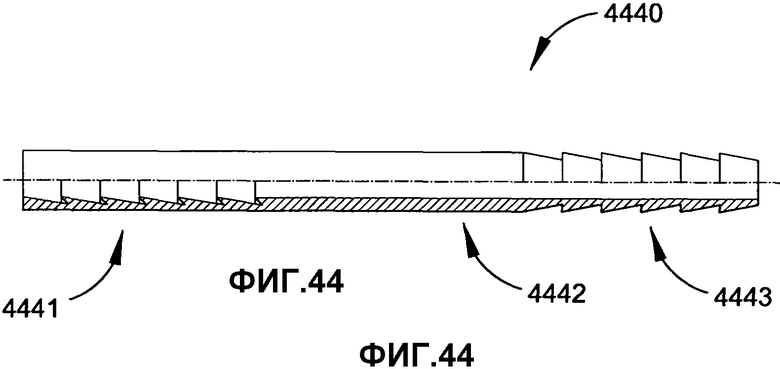
на фиг. 44 показан вид сбоку, частично в сечении, части трубки согласно некоторым вариантам осуществления, на котором показаны периодические отклонения формы вдоль внутренней и наружной поверхности трубки в секциях, разнесенных вдоль трубки.
ПОДРОБНОЕ ОПИСАНИЕ
Описанные варианты осуществления касаются способов и устройств для использования в продвижении зонда. Поскольку в описанных вариантах осуществления могут использоваться зонды различного вида, данное описание будет сосредоточено главным образом на устройствах и способах для продвижения зонда в тракте, проходе или области. В описанных способах и устройствах применяется удлиненная гибкая трубка, образующая полость и выполненная с возможностью размещения в тракте, проходе или области, при этом имеющая проксимальный конец и дистальный конец. Приводной механизм соединен с проксимальным концом этой трубки, а столб жидкости продолжается от проксимального конца до дистального конца трубки. Приводной механизм выполнен с возможностью вызывать перемещение столба жидкости в трубке для придания трубке импульса движения вперед, что содействует продвижению по меньшей мере дистального конца трубки в тракте, проходе или области, когда по меньшей мере дистальный конец поддерживается частью тракта, прохода или области.
В общем, перемещение столба жидкости в полости сообщает импульс движения внутренней стенке трубки вдоль большей части длины трубки за счет трения и/или турбулентности. Например, для трубки длиной около 3 метров перемещение столба жидкости в трубке сообщит некоторое количество движения трубке относительно поверхности подложки (или) прохода вдоль большей части трехметровой длины трубки, за исключением тех секций, которые располагаются вблизи приводного механизма или не опираются на поверхность подложки прохода.
В данном описании термины «проксимальный» и «дистальный» поясняют относительное положение. Вообще, термин «дистальный» рассчитан на обозначение положения или направления, в общем, в направлении конца трубки, который должен быть продвинут в тракте впереди остальной части трубки. Термин «проксимальный» рассчитан на обозначение положения или направления, в общем, противоположного тому, что называют «дистальным», и может обозначать положение или направление к тому концу трубки, с которым соединен приводной механизм. Описанные варианты осуществления, в общем, касаются продвижения зонда в дистальном направлении.
В частности, на фиг. 1 система 100 для продвижения зонда 160 описана более подробно. Система 100 содержит устройство 110 для продвижения, реагирующее на команды блока 115 управления для продвижения зонда 160 в тракте 180 или иной области, когда зонд 160 помещен в тракт 180 или иную область.
Устройство 110 для продвижения содержит приводной механизм 130, соединенный с проксимальным концом 142 удлиненной гибкой трубки 140. Трубка имеет дистальный конец 144, на котором расположен зонд 160. Приводной механизм 130 подчиняется сигналам управления, получаемым от блока 115 управления для управления некоторым средством привода, таким как вал привода, который управляет поршнем, чтобы вызвать возвратно-поступательное (в прямом и обратном направлениях) перемещение столба 156 жидкости в трубке 140.
Гибкая трубка 140 определяет основную внутреннюю полость 141, в пределах которой продолжается столб 156 жидкости. Основная внутренняя полость 141 продолжается от прилегающего приводного механизма 130 до дистального конца 144, при этом столб 156 жидкости продолжается по существу по всей длине полости 141. Столб 156 жидкости может не продолжаться непосредственно до зонда 160 с целью обеспечения расположения дистального средства смещения (описанного ниже) проксимально зонду 160 для смещения столба 156 жидкости в проксимальном направлении, после того как он был продвинут дистально. Столб 156 жидкости содержит часть объема жидкости, заключенного в трубке 140, дистальном средстве смещения и жидкостной камере приводного механизма 130. Примеры дистального средства смещения показаны и описаны ниже в связи с фиг. 21-36.
Удлиненная гибкая трубка 140 может иметь диаметр и длину, значения которых выбраны так, чтобы удовлетворять конкретному диагностическому применению. Материал трубки 140 точно так же может быть выбран с возможностью удовлетворения конкретному применению. Например, если устройство 110 для продвижения используется для продвижения зонда в биологическом тракте, например, в желудочно-кишечном тракте, трубка может иметь максимальный внешний диаметр от около 5 мм до около 15 мм (возможно ближе к 7 мм) и может иметь длину от около 1 метра до около 10 метров, возможно от около 3 метров до около 6 метров. Трубка длиной примерно от 3 до 4 метров может быть пригодна для продвижения зонда 160 в кишечнике (т.е. в тонкой кишке) через анальное отверстие.
Материал трубки, используемой для обследования кишечника (т.е. для эндоскопического обследования желудочно-кишечного тракта), может быть образован соответствующим гибким и инертным с медицинской точки зрения материалом, таким как подходящий поливинилхлорид (PVC), силикон, латекс или резина. Материал трубки 140 должен позволять трубке 140 изгибаться с возможностью образования петли относительно малого минимального диаметра (в зависимости от области применения) без того, чтобы стенка трубки 140 перегнулась, сжалась или как-то иначе деформировалась с уменьшением внутреннего сечения трубки 140. Для этой цели стенка трубки может быть армирована для повышения конструктивной целостности. Применительно к эндоскопии, минимальный диаметр петли может составлять около 2 см и, например, может находиться в диапазоне от около 1 см до около 5 см.
В тех областях применения в медицине и ветеринарии, где требуется обследовать сосудистый тракт (т.е. для ангиоскопии), диаметр и длина трубки могут быть соразмерно меньшими, например, диаметр может составлять от около 3 мм до около 10 мм (возможно ближе к 5 мм), а длина - от около 0,8 м до 3 м, при этом также подбирают зонд 160 соответствующего малого диаметра.
Для обследования объектов в большей степени промышленного назначения, например, для обследования трубопроводов, коробов, контейнеров, проходов, каналов и других областей, доступ к которым для человека неудобен, небезопасен или затруднен, трубка 140 может быть выполнена из более грубого материала по меньшей мере на ее наружной поверхности, чтобы избежать повреждений трубки или уменьшить их, по мере того как она проходит вдоль потенциально абразивных поверхностей. В некоторых областях практического применения трубка 140 должна быть относительно гибкой и способной в какой-то степени захватывать поверхность, конструкцию или объект, по которым трубка 140 должна передвигаться. Таким образом, периодические отклонения формы, образованные вдоль наружной поверхности трубки 140, как будет подробнее описано ниже со ссылкой на фиг. 37А-44, могут способствовать зацеплению по механизму трения с поверхностью или структурой, по которым трубка 140 должна передвигаться.
Система 100 может содержать компьютерную систему 120 для обеспечения функций управления, обработки сигналов и интерфейса пользователя в отношении продвижения зонда 160. Таким образом, компьютерная система 120 может содержать блок 115 управления, который может быть создан в виде аппаратного обеспечения, программного обеспечения либо сочетания того и другого. Хотя и не показано, компьютерная система 120 содержит по меньшей мере один процессор или накопитель, выполненные с возможностью выполнения функций, представленных в настоящем описании.
Компьютерная система 120 может содержать блок 124 интерфейса пользователя. Компьютерная система 120 может также содержать блок 122 обработки сигналов для приема и обработки сигналов от зонда 160, таких как сигналы, соответствующие данным изображения или состоянию, или сигналы обратной связи. Блок 122 обработки сигналов может взаимодействовать с блоком 124 интерфейса пользователя, чтобы обеспечивать передачу изображений, собранных зондом 160, на устройство отображения (не показано), так чтобы пользователь системы 100 мог располагать визуальной обратной связью по мере продвижения зонда 160.
Блок 124 интерфейса пользователя может быть выполнен с возможностью обеспечения изменения или адаптации настроек и/или функций блока 122 обработки сигналов и блока 115 управления для соответствия конкретной окружающей среде, практическому применению или обстоятельствам.
Каждый из блоков 115, 122 и 124 может быть выполнен в виде программного кода, хранящегося в памяти, доступной по меньшей мере одному процессору, и может быть дополнен соответствующими компонентами программного обеспечения и/или аппаратного обеспечения, такими как компоненты ввода-вывода, компоненты операционной системы, периферийные устройства компьютера и т.д.
В дополнение к приводному механизму 130 может обеспечиваться вспомогательное оборудование 135, управляемое блоком 115 управления, для обеспечения питания, сигналов и/или материалов для зонда 160. Например, вспомогательное оборудование 135 может обеспечивать электропитание одного или нескольких источников света, таких как светоизлучающие диоды (LED), расположенные на дистальном торце зонда 160, например, посредством по меньшей мере одного кабельного канала, продолжающегося вдоль трубки 140. Кроме того, в том случае, когда зонд 160 содержит устройство для сбора изображений, имеющее прибор с зарядовой связью (CCD), или иное достаточно малое устройство для визуализации, по меньшей мере один кабельный канал может использоваться для питания такого устройства, предназначенного для сбора изображений.
Вспомогательное оборудование 135 может дополнительно содержать источник очищенного воздуха и/или воды, подаваемых к зонду 160 по одному или нескольким дополнительным каналам, продолжающимся вдоль трубки 140. С этой целью вспомогательное оборудование 135 может содержать соответствующий компрессор для нагнетания воздуха, воды или иного вещества, подаваемого к зонду 160. В зависимости от области применения, в зонде 160 может использоваться воздуховодное окно, расположенное на его дистальном конце, для подачи воздуха в тракт, такой как сосудистый тракт или кишечник. Зонд 160 может также дозированно подавать воду из отверстия на его дистальной поверхности, например, для очистки зоны перед устройством для визуализации.
Вспомогательное оборудование 135 может частично или полностью управляться блоком 115 управления, который в свою очередь может находиться под управлением пользователя через блок 124 интерфейса пользователя, или же оно может управляться отдельно, например, путем манипулирования вручную соответствующими компонентами вспомогательного оборудования, с целью обеспечения необходимого взаимодействия с зондом 160. В зависимости от области применения, вспомогательное оборудование 135 может также содержать механизм для контролируемого забора материала, примыкающего к зонду 160, например, для биопсии или иного его последующего анализа. С этой целью вспомогательное оборудование 135 может механически, пневматически и/или электрически сообщаться с зондом 160 посредством дополнительного всасывающего канала и/или управляющего кабельного канала, продолжающегося вдоль трубки 140.
В системе 100, показанной на фиг. 1, может использоваться беспроводный сбор данных изображения, собираемых устройством для визуализации в зонде 160, при этом такие данные принимаются соответствующей антенной, связанной с компьютерной системой 120, для подачи данных изображения непосредственно в блок 124 обработки данных для их обработки. Согласно альтернативному или дополнительному варианту сигналы управления по беспроводной связи могут быть приняты от зонда 160 или переданы зонду 160, управляемому блоком 115 управления и/или вспомогательным оборудованием 135 с использованием соответствующего маломощного радиотрансивера ближнего радиуса действия.
С целью продвижения зонда 160 приводной механизм 130 сообщает столбу 156 жидкости скорость определенного профиля в полости 141 по повторяющейся схеме. Пример такого профиля скорости показан на графике скорости как функции времени на фиг. 2. Перемещение столба 156 жидкости, придаваемое приводным механизмом 130, можно разделить на секцию 30 перемещения вперед и секцию 34 обратного перемещения, при этом каждая из секций 31, 34 подразделяется на две части или фазы. Секция 30 перемещения вперед разделяется на первую фазу 31, на которой приводной механизм 130 сообщает постепенное ускорение проксимальному концу столба жидкости. На второй фазе 32, которая сразу же следует за первой фазой, приводной механизм 130 обеспечивает резкое замедление скорости до момента, когда столб 156 жидкости остановится в положении 33 покоя, которое соответствует перемещению жидкости 156 в ее самое дистальное положение (соответствующее точке максимального хода) в трубке 140. Секция 34 обратного перемещения может далее содержать первую фазу 35 резкого ускорения в проксимальном направлении, за которой сразу же следует вторая фаза 36 постепенного снижения скорости в проксимальном направлении, которая продолжается до того момента, когда столб 156 жидкости опять остановится в своем самом проксимальном положении, обозначенном ссылочной позицией 37.
Хотя первая и вторая фазы 31, 32, 35 и 36 секций 30, 34 перемещения вперед и назад изображены на фиг. 2 как фазы с постоянным изменением скорости (т.е. постоянным ускорением) в каждой фазе, такие изменения скорости необязательно должны быть линейными. Скорее, профиль скорости, включающий в себя резкую инверсию (т.е. переход от малого, но положительного ускорения к большому отрицательному ускорению и наоборот), рассматривается как эффективный для передачи импульса движения от столба 156 жидкости к трубке 140 в переднем (т.е. дистальном) направлении.
Если требуется отвести назад зонд 160, профиль скорости можно инвертировать так, чтобы он имел резкое ускорение и снижение скорости с каждой стороны от наиболее проксимального положения покоя, обозначенного ссылочной позицией 37. Например, фаза резкого ускорения будет сопровождаться фазой постепенного снижения скорости в секции перемещения вперед, а за фазой постепенного ускорения немедленно последует фаза резкого снижения скорости в секции перемещения назад.
В некоторых вариантах осуществления резкая инверсия скорости может быть использована только в секции 30 перемещения вперед или только в секции 34 обратного перемещения, при этом другая секция перемещения имеет относительно плавное изменение скорости.
Хотя приводной механизм может быть выполнен с возможностью сообщения проксимальному концу столба 156 жидкости скорости требуемого профиля, в силу того, что перемещение столба 156 жидкости обусловлено разностью давления, создаваемой приводным механизмом и сообщаемой столбу 156 жидкости от проксимального конца 142 до дистального конца 144, по длине столба 156 жидкости может иметь место некоторое падение давления. Таким образом, профиль скорости, приданный приводным механизмом 130 столбу 156 жидкости на проксимальном конце 142, может не совпадать с профилем скорости, который воспринимается столбом 156 жидкости на дистальном конце 144. С целью минимизации или снижения потери давления по длине трубки 140, в общем, цилиндрическая стенка трубки 140 может быть усилена для сопротивления расширению или сжатию стенки трубки в ответ на перепад давления, образуемый вдоль столба 156 жидкости. Кроме того, внутренний диаметр полости 141 может постепенно снижаться по длине трубки 140 от первого значения внутреннего диаметра на проксимальном конце 142 до меньшего второго значения внутреннего диаметра на дистальном конце 144. Такое снижение диаметра может быть плавным или ступенчатым. Например, ступенчатое снижение может содержать снижения, скажем, на 0,05 мм или 0,1 мм через каждые 15, 20, 25 или 30 см вдоль трубки 140. Снижение диаметра вдоль трубки 140 может быть линейным или нелинейным. В этом контексте уменьшение внутреннего диаметра по длине трубки 140 не зависит от каких-либо периодических изменений внутреннего диаметра полости, вызванных периодическими отклонениями формы, такими как описаны ниже в связи с фиг. 37А-44.
Потери давления вдоль трубки 140 могут быть минимизированы путем использования жидкости, плотность которой при комнатной температуре и внутренних температурах тела примерно та же или выше, чем у воды при тех же температурах. Жидкости с такой плотностью обычно заметно не сжимаются под относительно малым давлением, создаваемым приводным механизмом 130. Таким образом, вода, такая, например, как очищенная или деминерализованная вода, может использоваться в качестве жидкости для столба 156 жидкости.
При использовании системы 100 трубка 140 в большей своей части по длине может быть свита, закручена или провисать, так что она может выпрямляться постепенно, по мере того как дистальный конец 144 и зонд 160 помещены внутрь и продвигаются в тракте 180 или иной области. Таким образом, по мере продвижения зонда 160 под управлением приводного механизма 130, все большая и большая часть трубки будет поступать в тракт 180. Когда вся слабина трубки 140 будет выбрана и та часть трубки 140, которая находится вне тракта 180, не сможет далее продвигаться, зонд 160 достигнет предела, до которого он может проходить в тракте 180.
После окончания эндоскопического, ангиоскопического или иного обследования зонд 160 может быть извлечен из тракта 180 путем мягкого вытягивания вручную части трубки 140, которая остается за пределами тракта 180. Это может сопровождаться и/или заменяться работой приводного механизма 130 с целью создания инверсионного профиля скорости для столба 156 жидкости, направленного на сообщение обратного движения и отвода назад трубки 140, в общем, в проксимальном направлении.
Устройство 110 для продвижения показано и подробнее описано со ссылкой на фиг. 3, 4А и 4В. Как показано на фиг. 3, устройство 110 для продвижения содержит приводной механизм 130, соединенный с проксимальным концом 142 трубки 140. Зонд 160 соединен с дистальным концом 144 трубки 140. Приводной механизм 130 может содержать поршень 352 привода, способный совершать возвратно-поступательное перемещение относительно камеры 351, ограниченной стенкой 350 камеры. Перемещение поршня 352 в пределах стенки 350 может нагнетать давление или сбрасывать давление жидкости, такой как вода, в камере 351, что заставляет жидкость либо выходить из камеры 351 через отверстие 356, либо поступать обратно в камеру 351. Различные альтернативные варианты выполнения приводного механизма 130 показаны и описаны ниже в связи с фиг. 16А-20.
Приводной механизм 130 может содержать приводное колесо 322, выполненное с возможностью контактного воздействия на приводное звено 324, соединенное с валом 354 привода, управляющим поршнем 352. Приводное колесо 322 и приводное звено 324 выполнены так, что вращение приводного колеса 322 по часовой стрелке или против часовой стрелки вызывает линейное перемещение приводного звена 324 соответственно в проксимальном или дистальном направлении. Приводное колесо 322 может быть закреплено на монтажном кронштейне 310 для установки на поверхности и/или конструкции (не показана) посредством одного или нескольких крепежных элементов, введенных через пазы 312, образованные в монтажном кронштейне 310. Приводное звено 324 располагается на опоре 326, жестко связанной с монтажным кронштейном 310. Приводное звено 324 может скользить относительно опоры 326 с относительно малым трением.
В некоторых вариантах осуществления приводное звено 324 и/или вал 354 привода могут съемно крепиться к поршню 352, так чтобы камеру 350 и все более дистально расположенные от нее части (в том числе трубку 140 и зонд 160) можно было заменить после одного или нескольких раз использования или в связи со снижением рабочих характеристик.
Приводное колесо 322 может вращаться под управлением шагового двигателя (не показан), который входит в состав приводного механизма 130. Управление шаговым двигателем может осуществляться блоком 115 управления с использованием соответствующей программы-драйвера, одной из широко доступных программ для серийно выпускаемых шаговых двигателей. Блок 115 управления может быть выполнен с возможностью заставить шаговый двигатель вращать приводное колесо 322 так, чтобы сообщать проксимальному концу столба 156 жидкости скорость требуемого профиля путем продвижения вперед и отвода назад поршня 352 в пределах стенки 350.
Как показано на фиг. 3 и 4А, механизм 110 для продвижения может содержать Y-образное сочленение 330, находящееся в соединении между выходным отверстием 356 камеры 351 привода и концом трубки 140. Y-образное сочленение 330 служит средством, позволяющим одному или нескольким каналам 340, 342 проходить в проксимальный конец трубки 140 или вливаться в него, так что такие каналы продолжаются в полости 141 и имеют одинаковую протяженность со столбом 156 жидкости вдоль большей части длины трубки 140. Y-образное сочленение 330 имеет проксимальный конец 332, соединенный с камерой 351 привода через отверстие 356 для создания связи по текучей среде. Проксимальный конец 332 образует первую ветвь Y-образного сочленения 330, в то время как вторая ветвь 334 продолжается под острым углом от проксимального конца 332, как показано на фиг. 3. Y-образное сочленение 330 имеет дистальный конец 336, через который проходят столб 156 жидкости и каналы 340, 342 для текучей среды.
Канал 340 может определять вспомогательную полость, через которую проходят другие каналы для передачи сигналов и/или веществ между вспомогательным оборудованием 135 и зондом 160. Такие каналы могут включать в себя, например, проходы для воздуха и/или воды, электропроводы для передачи сигналов, управляющие кабели, биопсийную трубку и т.д. Канал 342 может содержать электропроводы, например, для подачи напряжения на один или несколько источников света, расположенных на дистальном торце 162 зонда 160. Канал 342 может быть соединен с каналом 340, так чтобы продолжаться по спирали вдоль него по мере того как оба канала 340, 342 продолжаются в полости 141 трубки 140.
Столб 156 жидкости проходит в полости 141 в пространстве 376, не занятом каналами 340, 342.
Как показано на фиг. 4А и 4В, полые соединители 410, 412, 414 и 416 для канала подачи текучей среды могут использоваться для соединения между собой различных секций устройства 110 для продвижения. Например, первый соединитель 410 соединяет проксимальный конец 332 Y-образного сочленения 330 с трубкой 440, которая соединяется со стенкой 350 вокруг отверстия 356. Второй соединитель 412 соединяет дистальный конец 336 Y-образного сочленения 330 с проксимальным концом 142 трубки 140. Третий соединитель связывает дистальный конец трубки 140 с дистальной секцией 450 трубки, которая, в свою очередь, соединена с гибкой секцией 460 посредством четвертого соединителя 416. Гибкая секция 460 может быть непосредственно соединена с зондом 160 и может регулироваться по направлению, например, с использованием управляющих кабелей, проходящих в каналах 340 и/или 342.
Секция 450 дистального конца включает в себя мембрану 454, уплотняющую дистальный конец столба 156 жидкости путем изоляции от внутренней стенки дистальной секции 452 трубки и изоляции от наружных стенок каналов 340, 342. Может также быть создана, в общем, цилиндрическая уплотняющая секция 455, чтобы не позволить жидкости, находящейся в столбе 156 жидкости, проникнуть в гибкую секцию 460.
Гибкая секция 460 может определять внутреннюю полость или камеру 464, через которую проходят каналы 340, 342 для соединения с зондом 160. Гибкая секция 460 имеет гибкую стенку 462, ограничивающую камеру 464. Гибкая стенка 462 соединена с четвертым соединителем 416 на проксимальном конце гибкой стенки 462 и с зондом 160 на дистальном конце гибкой стенки 462.
Как показано на фиг. 4В, зонд 160 может вмещать в себя устройство 474 для визуализации, а также один или несколько источников 472 света, таких как LEDS, расположенных на дистальном торце 162 с целью освещения в дистальном направлении и сбора изображений в области, освещаемой источниками 472 света.
Обратимся теперь к фиг. 5А и 5В, на которых показана и описана альтернативная форма секции 450 дистального конца. Альтернативный вариант секции 550 дистального конца показан на фиг. 5А и 5В схематично и не в масштабе. Секция 550 дистального конца содержит гибкую мембрану 554, герметично соединенную с внутренней поверхностью цилиндрической стенки 552 и продолжающуюся внутрь в форме конуса в дистальном направлении для герметичного соединения по окружности вокруг канала 340. Гибкая мембрана 554 расположена так, что столб 156 жидкости располагается, в общем, проксимально от гибкой мембраны 554, при этом второй объем 556 текучей среды, такой как воздух, расположен дистально от гибкой мембраны 554. Второй объем 556 текучей среды должен быть сжимаемым объемом текучей среды, так чтобы при движении столба 156 жидкости в дистальном направлении под воздействием приводного механизма 130 гибкая мембрана 554 могла деформироваться, как показано на фиг. 5В, и до некоторой степени сжимать второй объем 556 текучей среды. Такое сжатие второго объема 556 текучей среды и упругое деформирование гибкой мембраны 554 выполняют функцию смещения, поскольку деформирование и сжатие направлены на проталкивание столба 156 жидкости обратно в проксимальном направлении вслед за дистальным перемещением столба 156 жидкости.
На фиг. 6 схематично представлен альтернативный вариант системы 100. Система 100, как показано на фиг. 6, имеет те же признаки и функции, как и те, что описаны выше в связи с фиг. 1. Кроме того, компьютерная система 120 содержит устройство 612 индикации для отображения собранных изображений, устройство 614 ввода, такое как клавиатура, а также устройство 616 управления пользователя, такое как ручка управления, для взаимодействия с блоком 115 управления. Вспомогательное оборудование 135, которое может быть интегрировано в компьютерную систему 120, используется при необходимости для подачи воздуха и/или воды и/или обеспечения всасывания для биопсийной трубки. Блок 115 управления может быть выполнен с возможностью преобразования входных данных с устройства 616 управления пользователя в управляющие сигналы, которые должны поступать на регулируемую по направлению гибкую секцию 662, связанную с зондом 160 и секцией дистального конца (такой как показана и описана в связи с фиг. 4В, 5А, 5В или 21-36) и являющуюся промежуточным звеном между ними, с целью изменения положения зонда 160.
Каналы 340, 342 предусмотрены в трубке 140 для выполнения соответствующих функций управления и/или обратной связи в отношении гибкой секции 662 и зонда 160. Согласно альтернативному или дополнительному варианту, для регулирования направления зонда 160 могут обеспечиваться другие каналы или средство управления. Как показано на фиг. 6, секция 450 дистального конца (или 550, 2150, 2250, 2350, 2450, 2550, 2750, 2950, 3050, 3150, 3250, 3450 или 3650), гибкая секция 662 и зонд 160 образуют дистальный участок 644 на дистальном конце трубки 140. Версии системы 100, показанной на фиг. 6, могут быть пригодны, например, для эндоскопии и ангиоскопии.
На фиг. 7А и 7В показана и описана трубка 740 согласно некоторым конкретным вариантам выполнения трубки 140. Трубка 740 имеет, в общем, цилиндрическую стенку 750, определяющую полость 741, через которую проходит столб 156 жидкости и возможно каналы 340, 342. Продольные армирующие элементы 752 могут быть встроены или как-то иначе помещены в стенку 750 и разнесены по окружности вокруг стенки 750. Согласно альтернативному или дополнительному варианту армирующие элементы 752 могут содержать каналы для соединения с зондом 160 для выполнения функций каналов, описанных выше.
На фиг. 8А и 8В показана и описана трубка 840 согласно некоторым конкретным вариантам осуществления. Трубка 840 имеет по существу цилиндрическую стенку 850, определяющую полость 841, а также имеет множество армирующих элементов 852, расположенных по окружности вокруг внешней стороны стенки 850. Армирующие элементы 852 могут крепиться или как-то иначе присоединяться к наружной поверхности стенки 850 соответствующим гибким образом, чтобы сопротивляться изменениям диаметра стенки 850, при этом позволяя трубке 840 искривляться необходимым образом в процессе прохождения по каналу. Армирующие элементы 852, таким образом, выполняют ту же функцию и служат той же цели, что и армирующие элементы 752 трубки 740.
В трубках 940, 1040 и 1140, как показано на фиг. 9А, 9В, 10А, 10В, 11А и 11В, также используются соответствующие армирующие элементы 952, 1052 и 1152 с целью придания структурной целостности стенке трубки, чтобы сопротивляться сжатию или расширению стенки трубки, вызванным изменениями давления, обеспечивая при этом должную гибкость для прохода через извилистый канал. На фиг. 9А и 9В показаны армирующие элементы 952, выполненные в виде спирали вокруг и вдоль внешней стороны стенки 950, определяющей центральную полость 941.
Трубка 1040 схожа с трубками 840 и 940 в том, что в трубке 1040 сочетаются продольные и идущие по спирали армирующие элементы 1052, объединяя, таким образом, признаки трубок 840 и 940. Армирующие элементы 1052 расположены вокруг внешней стороны стенки 1050, определяющей центральную полость 1041.
Трубка 1140 схожа с трубкой 940, за исключением того, что армирующие элементы 1152 выполнены в виде отдельных спиралей, которые пересекаются друг с другом по мере их прохождения вокруг стенки 1150. Армирующие элементы 752, таким образом, имеют противоположный наклон в отношении их форм спирали. Такие формы спирали могут иметь различные углы относительно продольной оси трубки 1140, а потому могут иметь витки, разнесенные различным образом. Стенка 1150 определяет центральную полость 1141, которая, как и полости 741, 841, 941 и 1041, обеспечивает в ней прохождение столба 156 жидкости.
В некоторых вариантах осуществления армирующие элементы 752, 852, 952, 1052 и 1152 могут содержать один или несколько каналов для соединения с зондом 160 для выполнения функций каналов, описанных выше. Таким образом, подобные армирующие элементы могут выполнять двойную функцию. В случае армирующих элементов 852, 952, 1052 и 1152, расположенных вокруг внешней стороны стенки трубки, такие элементы могут присоединяться к внешней поверхности трубки, например, с помощью соответствующего связующего или ультразвуковой сварки, либо путем наложения адгезивного слоя или покрытия. Для применения в медицине такие адгезивные или скрепляющие материалы должны быть в должной степени инертны с медицинской точки зрения. В некоторых вариантах осуществления армирующие элементы 952, 1052 и 1152 могут работать в качестве периодических отклонений формы вдоль наружной поверхности стенки трубки для увеличения зацепления трубки силами трения с окружающей областью в той степени, которая будет достаточна для повышения возможности трубки продвигаться в канале или иной области под действием приводного механизма 130.
На фиг. 12А, 12В, 13А, 13В, 13С, 14А, 14В, 15А и 15В показаны различные конкретные варианты осуществления трубки 140 в отношении расположения каналов, проходящих в полости 141 трубки 140. Как показано на фиг. 12А и 12В, трубка 1240 может иметь множество каналов 1262, продолжающихся в полости 1241, определяемой трубкой 1250. Каналы 1262 могут проходить по схеме, которая предполагает расположение множества каналов 1262 по спирали вокруг центрального канала 1262, который может быть больше по диаметру (например, вмещать в себя дополнительные каналы), чем каналы 1262, идущие по спирали. Каналы 1262 могут занимать наибольшую часть пространства в полости 1241, при этом оставляя достаточное пространство для перемещения столба 156 жидкости в оставшихся областях 376.
Как показано на фиг. 13A, 13В и 13С, трубка 1340 имеет, в общем, цилиндрическую внешнюю стенку 1350, определяющую по меньшей мере одну полость 1341. По меньшей мере одна разделительная мембрана 1364 продолжается в полости 1341 для разделения внутренней площади сечения, определяемой стенкой 1350, на две или более секций, как показано на фиг. 13В и 13С. На фиг. 13В показана трубка 1340а, в которой разделительная мембрана 1364 разделяет полость 1341 на секцию, вдоль которой проходят каналы 1362, и на другой участок, вдоль которого может свободно проходить столб 156 жидкости. На фиг. 13С показан альтернативный вариант сечения, представленного на фиг. 13А, где трубка 1340b имеет по меньшей мере две разделительные мембраны 1364, которые разделяют полость 1341 на четыре секции, две из которых используются для размещения в них канала 1362, в то время как остальные два участка полости 1341 обеспечивают свободное перемещение вдоль них столба 156 жидкости.
Как показано на фиг. 14А и 14В, трубка 1440 согласно некоторым вариантам осуществления имеет стенку 1450, определяющую полость 1441, которая является основной полостью, внутри которой проходит вспомогательный канал 1464, определяющий вспомогательную полость. Этот вспомогательный канал 1464 вмещает в себя множество каналов 1462, содержащихся во вспомогательной полости, в общем, цилиндрической формы. Вспомогательный канал 1464 может крепиться или как-то иначе присоединяться к внутренней поверхности стенки 1450 или быть выполненными заодно с ней.
На фиг. 15А и 15В показана трубка 1540 согласно дополнительным вариантам осуществления, имеющая стенку 1550, определяющую полость 1541. Полость 1541 представляет собой основную полость, через которую продолжается вспомогательный канал 1564, определяющий вспомогательную полость, аналогичный вспомогательному каналу 1464, за исключением того, что он располагается по центру в основной полости 1541. Вспомогательный канал 1564 вмещает в себя множество каналов 1562 внутри, в общем, цилиндрической трубки. Вспомогательный канал 1564 может содержать трубку, которая расположена по центру в основной полости 1541 посредством ряда разнесенных элементов для позиционирования, таких как установочные ребра, продолжающиеся внутрь от стенки 1550 так, чтобы существенно не препятствовать перемещению столба 156 жидкости в основной полости 1541.
На фиг. 16А, 16В, 17А, 17В, 18, 19 и 20 схематично представлены различные варианты осуществления приводного механизма 130. Как показано на фиг. 16А и 16В, приводной механизм 130 может содержать простейший поршень 1652 и ведущий вал 1654, выполненный с возможностью перемещения поршня 1652 в прямом и обратном направлениях в камере 1651, ограниченной стенкой 1650. По мере того как поршень 1652 периодически перемещается вперед и назад в пределах стенки 1650, жидкость в камере 1651 периодически выталкивается наружу из отверстия 1656, образованного в стенке 1650, а затем втягивается назад в камеру 1651 через отверстие 1656. Поршень 1652 входит в герметичное зацепление со стенкой 1650, так что жидкость в камере 1651 не проходит проксимально от поршня 1652.
Схема приводного механизма, представленная на фиг. 17А и 17В, по существу та же, что показана на фиг. 16А и 16В, за исключением того, что сжимаемая/расширяемая в продольном направлении гофрированная трубка или сильфон 1770 выполнены с возможностью продолжения между дистальной частью стенки 1650 и поршнем 1652, определяя тем самым объем 1751 текучей среды, ограниченный поршнем 1652 на одном конце, стенками типа гармошки сильфона 1770, а также стенками 1650, определяющими дистальное отверстие 1656. Сильфон 1770 устраняет необходимость в герметичном зацеплении между поршнем 1652 и стенкой 1650, например, когда такое зацепление может привести к нежелательному уровню трения или когда должное уплотнение может оказаться затруднительным. В некоторых вариантах осуществления сильфон 1770 может быть заменен на иную гибкую мембрану, которая также поддается сжатию упругим образом, но структурно менее оформлена, чем сильфон 1770.
Со ссылкой на фиг. 18 описываются дополнительные варианты осуществления приводного механизма 130, в которых применяется упруго деформируемая гибкая мембрана 1870, образующая одну стенку корпуса, заключающего в себя жидкий объем 1851. Стенка 1850 корпуса работает совместно с гибкой мембраной 1870 для замыкания жидкого объема 1851. Ведущий вал 1854, соединенный с плоским или обладающим некоторой кривизной поршнем 1852, используется для прикладывания направленного внутрь толкающего усилия к гибкой мембране 1870, чтобы тем самым вытеснить жидкость из жидкого объема 1851 через отверстие 1856 в стенке 1850 корпуса. После освобождения (т.е. при отводе назад) ведущего вала 1854 гибкая мембрана 1870 имеет возможность по меньшей мере частично вернуться в положение, из которого она была упругим образом выведена, что увеличивает количество жидкости в жидком объеме 1851 путем создания всасывания и тем самым втягивания жидкости обратно через отверстие 1856. Ведущий вал 1854 управляется приводным механизмом для периодического изгибания гибкой мембраны 1870 с целью перемещения столба 156 жидкости в прямом и обратном направлениях в полости 141. В некоторых вариантах осуществления ведущий вал 1854 может быть соединен с гибкой мембраной 1870, так чтобы отвод назад ведущего вала 1854 приводил к усилению возврата гибкой мембраны 1870 в ее ненагруженное положение (или по меньшей мере положение с меньшим смещением), тем самым, создавая всасывающее усилие, большее чем то, что может быть достигнуто гибкой мембраной 1870 самой по себе.
Приводной механизм, схематично показанный на фиг. 19, работает по тому же принципу, что и приводной механизм, представленный на фиг. 18, за исключением того, что вместо стержня и поршня толкающего действия цилиндрический поршень вращается с эксцентриситетом вокруг ведущего вала 1954 для циклического смещения внутрь упругой гибкой мембраны 1970, что приводит к уменьшению объема жидкости 1951 в корпусе, определяемом стенкой 1950 и гибкой мембраной 1970. По мере того как поршень 1952 вращается вокруг ведущего вала 1954, жидкость выталкивается наружу и всасывается внутрь через отверстие 1956, образованное в стенке 1950. В некоторых вариантах осуществления поршень 1952 может иметь продолговатую, некруглую (но искривленную) форму для придания столбу 156 жидкости скорости определенного профиля. Например, поршень 1952 может иметь более выраженную грушевидную форму или относительно плоский торец, а не круглый, но при этом также вращаться с эксцентриситетом вокруг ведущего вала 1954.
На фиг. 20 показан дополнительный альтернативный приводной механизм, в котором используются электромагнитные элементы 2054, расположенные с внешней стороны стенки 2050, определяющей камеру 2051. Поршень 2052 способен перемещаться под управлением электромагнитных элементов 2054, так чтобы выталкивать жидкость из камеры 2051 через отверстие 2056, образованное в стенке 2050, и вслед за этим втягивать жидкость обратно в камеру 2051. Поршень 2052 выполнен из соответствующего материала, чтобы создать возможность электромагнитного управления с использованием элементов 2054, и, как и в приводном механизме по вариантам осуществления, описанным в отношении фиг. 16А, 16В, 17А и 17В, используется либо герметичное зацепление между поршнем 2052 и стенкой 2050, либо сильфон, чтобы исключить такое герметичное зацепление.
Варианты осуществления приводного механизма, описанные выше в отношении фиг. 16А-20, представляют только некоторые примеры возможных механизмов для создания возвратно-поступательного перемещения столба 156 жидкости в трубке 140. Могут использоваться дополнительные варианты осуществления, например, предусматривающие пневматические, гидравлические, электрические или механические средства для создания повторяющихся положительных и отрицательных перепадов давления в пределах и по длине столба 156 жидкости, что приводит к его возвратно-поступательным перемещениям по схеме, поддающейся соответствующему управлению с целью придания столбу 156 жидкости скорости требуемого профиля.
Со ссылкой на фиг. 21-36 показаны и описаны различные варианты осуществления дистальной секции смещения. По аналогии с дистальной секцией 550 смещения, в этих вариантах осуществления используются различные средства или механизмы для смещения столба 156 жидкости назад в проксимальном направлении, после того как он был продвинут дистально. Это может также способствовать предотвращению сжатия стенки трубки, по мере того как столб жидкости втягивается проксимально под воздействием отрицательного давления с помощью приводного механизма 130. Соответственно все дистальные секции смещения, показанные на фиг. 21-36, предполагается размещать дистально от столба 156 жидкости, но проксимально от зонда 160, при этом их предполагается размещать в пределах стенки трубки, обеспечиваемой либо трубкой 140, либо секцией трубки, примыкающей или прилегающей к трубке 140.
Дистальная камера 2150 смещения, показанная на фиг. 21, имеет простейшую конструкцию, состоящую главным образом из цилиндрической стенки 2152 с подвижным элементом 2154, таким как поршень, способным перемещаться в камере 2156. На своем проксимальном торце элемент 2154 подвержен воздействию дистального конца столба 156 жидкости и, в ответ на перемещение столба 156 жидкости в дистальном направлении, проталкивается дистально. Камера 2156 содержит сжимаемый объем текучей среды, такой как воздух, и ограничена стенкой 2152 и дистальным концом, обеспеченным другой дистально размещенной конструкцией (не показана). Элемент 2154 входит в герметичное зацепление со стенкой 2152, так что жидкость столба 156 жидкости не проходит в камеру 2156. Увеличение давления в камере 2156, вызванное дистальным перемещением элемента 2154, создает проксимально направленное усилие, прикладываемое к элементу 2154 для возврата его в проксимальном направлении, по мере того как столб 156 жидкости втягивается проксимально под действием приводного механизма 130.
Дистальная камера 2250 смещения согласно фиг. 22 работает идентично той, что показана на фиг. 21, за исключением того, что стенка 2252 определяет более ограниченные торцевые проходы на проксимальном и дистальном концах. Подвижное звено 2254 перемещается в пределах стенки 2252 для сжатия камеры 2256 в ответ на дистальное перемещение столба 156 жидкости.
Дистальная камера 2350 смещения, показанная на фиг. 23, работает идентично той, что показана на фиг. 21, за исключением того, что она имеет дистальную торцевую стенку 2380, которая совместно с подвижным элементом 2350 на стенке 2352 определяет замкнутую камеру 2356, содержащую сжимаемую текучую среду, такую как воздух.
Дистальная камера 2450 смещения, показанная на фиг. 24, схожа с той, что показана на фиг. 23, за исключением того, что гибкая мембрана 2480 обеспечивается в качестве дистальной торцевой стенки. Совместно с подвижным элементом 2454 и стенкой 2452, гибкая мембрана 2480 определяет замкнутую камеру 2456, содержащую сжимаемую текучую среду, такую как воздух. Гибкая мембрана 2480 расширяется и сокращается в зависимости от давления в камере 2456 и может способствовать смещению подвижного элемента 2454 в проксимальном направлении.
Дистальная камера 2550 смещения, показанная на фиг. 25 и 26, схожа с той, что показана на фиг. 22, за исключением того, что подвижный элемент 2554 смещается дистально пружиной 2580, заключенной в стенке 2552. Пружина 2580 сжимается, когда подвижный элемент 2554 продвигается дистально, а значит, стремится сместить подвижный элемент 2554 в проксимальном направлении. Пружина 2580 располагается в камере 2556, определяемой дистально от подвижного элемента 2554.
Дистальная камера 2750 смещения, показанная на фиг. 27 и 28, идентична той, что показана на фиг. 25 и 26, за исключением того, что вместо пружины в камере 2756, определяемой стенкой 2752 дистально от подвижного элемента 2754, обеспечивается упруго деформируемая сетка или пористое тело 2780.
Дистальная камера 2950 смещения, показанная на фиг. 29, схожа с теми, что описаны выше, но имеет сильфон 2970, присоединенный к проксимальной стороне подвижного элемента 2954 для определения проксимальной камеры 2958, которая способна расширяться в ответ на дистальное перемещение столба 156 жидкости, но которая стремится сократиться согласно эффекту памяти формы, которым обладает сильфон, и/или благодаря повышению давления в дистальном объеме 2956 текучей среды, тем самым, смещая подвижный элемент 2954 в проксимальном направлении. Сильфон 2970 соединен на проксимальном конце дистальной камеры 2950 смещения со стенкой 2952. Сжимаемый дистальный объем 2956 текучей среды располагается дистально от подвижного элемента 2954, чтобы дополнительно смещать подвижный элемент 2954 в проксимальном направлении.
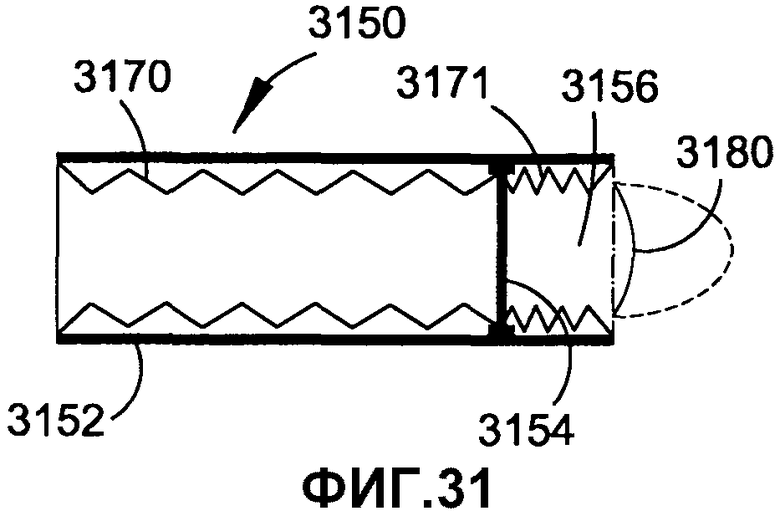
В дистальной камере 3050 смещения, показанной на фиг. 30, задействован первый сильфон 3070, подобно тому, как показано на фиг. 29, а также второй сильфон 3071, расположенный в дистальной камере 3056, определяемой стенкой 3052. Эффекты памяти формы противоположно направленного действия, которыми обладают первый и второй сильфоны 3070 и 3071, стремятся сместить подвижный элемент 3054 в проксимальном направлении. Дистальная камера 3150 смещения, показанная на фиг. 31, идентична той, что показана на фиг. 30, за исключением того, что ее дистальная торцевая стенка заменена упруго деформируемой гибкой мембраной 3180.
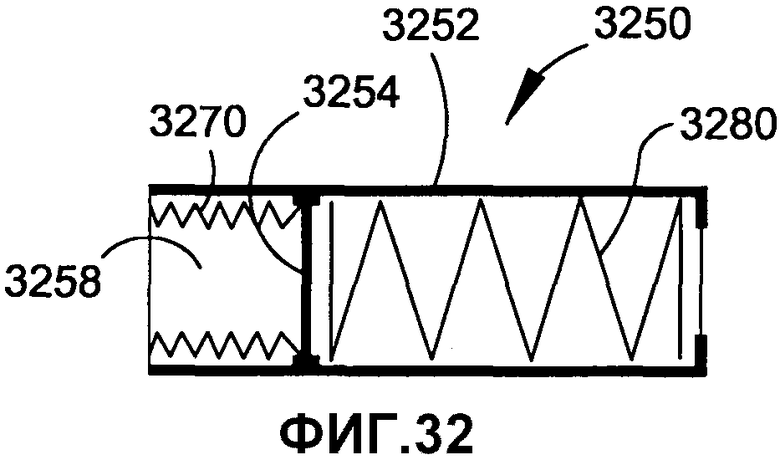
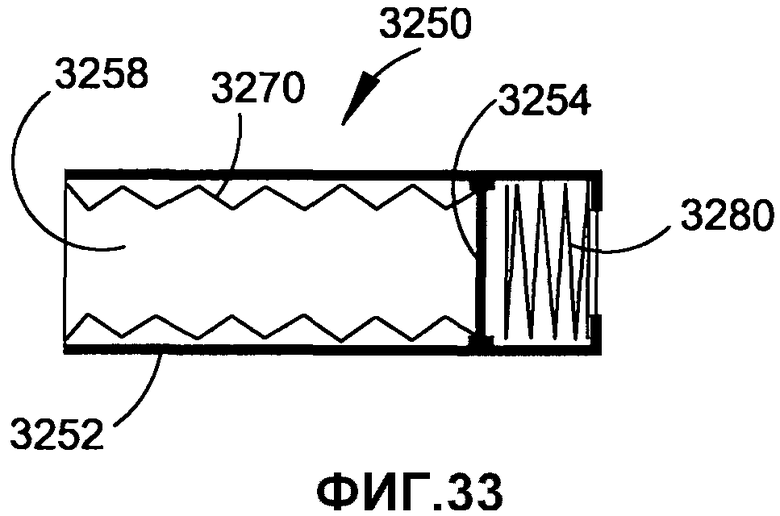
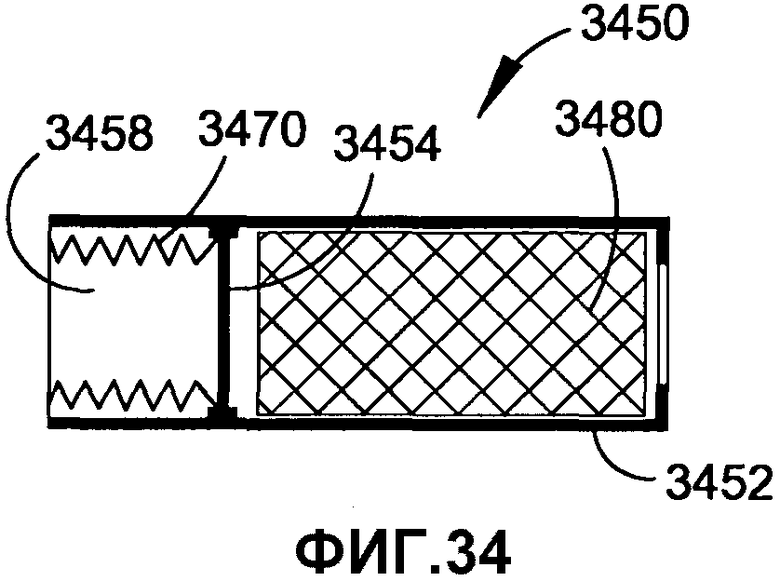
Дистальная камера 3250 смещения, показанная на фиг. 32 и 33, представляет сочетание признаков пружины и сильфона, показанных и описанных в связи с фиг. 25, 26 и 29. Дистальная камера 3450 смещения, показанная на фиг. 34 и 35, представляет сочетание признаков и функций сильфона и пористого тела сетки, описанных выше в связи с фиг. 27, 28 и 29. На всех фиг. 32-35 задействован проксимально расположенный сильфон 3270/3470, определяющий проксимальную камеру 3258/3458 и соединенный с подвижным элементом 3254/3454, при этом смещающий элемент, такой как пружина 3280 либо пористое тело или сетка 3480, располагается дистально от подвижного элемента 3254/3454 в пределах стенки 3252/3452.
Дистальная камера 3650 смещения, показанная на фиг. 36, имеет стенку 3652, определяющую внутреннюю сжимаемую камеру 3656 для текучей среды, расположенную между упруго деформируемой гибкой мембраной 3654 и упруго деформируемой гибкой мембраной 3680. Каждая из гибких мембран 3654 и 3680 может изгибаться дистально в ответ на дистальное перемещение столба 156 жидкости и будет стремиться вернуться в положение покоя, в котором они не смещены дистально, тем самым, стремясь сместить столб 156 жидкости в проксимальном направлении.
Со ссылкой на фиг. 37А, 37В, 38А, 38В, 39А и 39В описаны различные варианты выполнения трубки 140. В каждом из вариантов выполнения имеется номинальная толщина Х стенки, в отношении которой вдоль наружной поверхности трубки образованы периодические отклонения формы. Периодические отклонения формы имеют максимальную амплитуду Y и период Z чередования. Как показано на этих фигурах, периодические отклонения формы выполнены по схеме, в общем, напоминающей «елочку» или зубцы полотна пилы. Однако в некоторых вариантах осуществления периодические отклонения формы могут быть более закруглены и/или не иметь проксимально обращенной стреловидности (как в случае схемы «елочки»).
Как показано на фиг. 37А, минимальная толщина стенки трубки 3740 составляет величину X, при этом толщина стенки изменяется вдоль периодических отклонений формы между величинами Х и X+Y. В трубке 3745, показанной на фиг. 37В, толщина стенки изменяется между номинальной толщиной Х и величиной X-Y.
На фиг. 38А и 38В показана несколько иная схема «елочки», чем на фиг. 37А и 37В, не имеющая «поднутрения», но в остальном по существу та же самая, при этом номинальная толщина Х трубки 3845 больше, чем трубки 3840.
Трубка 3940, показанная на фиг. 39А, имеет большее расстояние Z между периодическими отклонениями формы, при этом толщина стенки изменяется между номинальной толщиной Х и величиной X+Y. Трубка 3945, показанная на фиг. 39В, такая же, как на фиг. 39А, но имеет большую номинальную толщину X, при этом толщина стенки варьируется от Х до X-Y.
В описанных и изображенных вариантах осуществления расстояние между периодическими отклонениями формы может составлять примерно от 2 мм до 50 мм. Изменение по толщине (т.е. амплитуда) Y может составлять величину от порядка 0,5 мм до около 5 мм, в зависимости от той области исследования, для которой предназначается трубка. Номинальная толщина Х стенки может быть от около 0,5 мм до около 10 мм, опять же в зависимости от области применения. В некоторых вариантах осуществления изменение толщины стенки может основываться на количественном соотношении с амплитудой Y (или М, как описано ниже), например, толщина может варьироваться между величинами Х+1/3Y и Х-1/2Y или между величинами Х+1/3Y и Х-2/3Y.
Со ссылкой на фиг. 40А, 40В, 41А, 41В, 42А и 42В представлены и описаны различные варианты осуществления трубки 140, в которых периодические отклонения формы созданы на внутренней стенке трубки. Номинальная толщина L стенки трубки может варьироваться совместно с амплитудой М и периодом N чередования периодических отклонений формы. Изображенные различные варианты осуществления имеют, в общем, проксимально обращенную схему «елочки», которую также можно назвать моделью пилообразной формы, хотя закругленные и/или непроксимально обращенные стреловидные отклонения формы также могут использоваться. Толщина стенки трубки 4040, показанной на фиг. 40А, изменяется от номинальной толщины L до величины L+M. На фиг. 40В номинальная толщина стенки изменяется от L до L-M. Трубки 4140 и 4145, показанные на фиг. 41А и 41В, по существу такие же, как трубки 4040 и 4045, если не считать более острого угла подвнутрения в схеме «елочки» последних. Номинальная толщина L стенки трубки 4240, показанной на фиг. 42А, изменяется от L до L+M. Номинальная толщина L стенки трубки 4245 изменяется от L до L-M, как показано на фиг. 42В. В некоторых вариантах осуществления изменение толщины стенки может основываться на количественном соотношении с амплитудой М, как описано выше.
Как показано на фиг. 43А и 43В, варианты выполнения трубки 140 включают в себя трубки 4340 и 4345, представляющие собой сочетания вариантов выполнения согласно фиг. 38А, 38В, 41А и 41В трубки, описанных выше. Трубка 4340 имеет номинальную толщину X, при этом толщина варьируется от Х до X+Y+M. Расстояние Z между наружными периодическими отклонениями формы может отличаться от расстояния N между внутренними периодическими отклонениями формы. Кроме того, внутренние и наружные периодические отклонения формы необязательно должны иметь одинаковую пилообразную форму или одинаковую форму «елочки». В частности, одни из периодических отклонений формы, внутренних или наружных, могут быть пилообразными, в то время как другие могут быть более закруглены и разнесены на большее расстояние. Трубка 4345, показанная на фиг. 43В, схожа с трубкой 4340, за исключением того, что ее номинальная толщина Х больше, при этом толщина изменяется от Х до X-Y-M. В некоторых вариантах осуществления изменение толщины стенки может основываться на количественном соотношении с амплитудой М и/или Y, как описано выше.
На фиг. 44 схематично представлена трубка 4440 согласно некоторым вариантам осуществления, в которой первая секция 4441 трубки может иметь внутренние периодические отклонения формы, в то время как вторая секция трубки 4440 может иметь наружные периодические отклонения формы. Первая и вторая секции трубки могут быть разделены секцией 4442, которая не содержит каких-либо внутренних или наружных периодических отклонений формы.
Согласно описанным вариантам осуществления, некоторые варианты выполнения трубки 140 могут содержать периодические отклонения формы вдоль части или значительного участка внутренней или наружной поверхности стенки трубки 140. Такие периодические отклонения формы на внутренней поверхности стенки трубки могут способствовать созданию большего сопротивления продвижению столба 156 жидкости в силу проксимально направленной стреловидности отклонений формы в некоторых вариантах осуществления, что способствует передаче импульса от столба 156 жидкости трубке 140 в дистальном направлении. Периодические отклонения формы, образованные на наружной стенке трубки 140, таким же образом могут содействовать продвижению трубки 140 путем создания большего сопротивления перемещению трубки 140 в проксимальном направлении, чем в дистальном направлении, так что отвод назад столба 156 жидкости приводит к малому перемещению трубки в обратном направлении по сравнению с перемещением трубки, достигнутым в прямом направлении.
Различные варианты выполнения трубки 140, представленные в настоящем описании, могут быть объединены, например, так чтобы создать периодические отклонения формы в сочетании с армирующими элементами, такими как те, что проходят снаружи вдоль стенки трубки или внутри стенки трубки. В частности, продолжение каналов, таких как каналы 340, 342, в полости 141 может сочетаться с внутренними и/или внешними периодическими отклонениями формы в стенке трубки и/или может сочетаться с наружными или встроенными продольными или расположенными по спирали армирующими элементами.
Описанные варианты выполнения трубки 140 могут быть сформированы, например, с помощью формования с использованием соответствующих материалов, таких как описаны выше.
Варианты осуществления, представленные в настоящем описании и изображенные на чертежах, следует рассматривать как не ограничивающие примеры. В этой связи описанные варианты осуществления не предполагают наложение ограничений и должны истолковываться соответствующим образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗОНД ДЛЯ ВИТРЭКТОМИИ | 2018 |
|
RU2759047C2 |
| ИНТРОДУКТОР КРУГОВОГО СШИВАЮЩЕГО ИНСТРУМЕНТА С ЖЕСТКОЙ ДИСТАЛЬНОЙ КОНЕЧНОЙ ЧАСТЬЮ | 2010 |
|
RU2559014C2 |
| ЭНДОСКОПИЧЕСКИЙ ИНСТРУМЕНТ С ПОРШНЕВЫМ ПРИВОДОМ | 2003 |
|
RU2334451C2 |
| ИНТРОДУКТОР КРУГОВОГО СШИВАЮЩЕГО ИНСТРУМЕНТА С МНОГОПРОСВЕТНОЙ ТРУБКОЙ | 2010 |
|
RU2557693C2 |
| ЭНДОСКОП С ПОВОРОТНОЙ ПРИЗМОЙ | 2009 |
|
RU2538626C2 |
| ИНТРОДУКТОР КРУГОВОГО СШИВАНИЯ ИНСТРУМЕНТА С РАДИАЛЬНО ОТКРЫВАЕМОЙ ДИСТАЛЬНОЙ КОНЕЧНОЙ ЧАСТЬЮ | 2010 |
|
RU2574988C2 |
| СПОСОБЫ ХИРУРГИЧЕСКОЙ ОБРАБОТКИ ПУТЕМ РЕЗАНИЯ И СШИВАНИЯ СКОБКАМИ | 2014 |
|
RU2690400C2 |
| ОБНАРУЖЕНИЕ НАЛЕТА С ИСПОЛЬЗОВАНИЕМ ПОТОКОВОГО ЗОНДА | 2013 |
|
RU2645605C2 |
| КАССЕТА С КРЕПЕЖНЫМИ ЭЛЕМЕНТАМИ, СОДЕРЖАЩАЯ ПУСКОВОЙ ЭЛЕМЕНТ, ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ НЕПОСРЕДСТВЕННОГО ВЗАИМОДЕЙСТВИЯ С КРЕПЕЖНЫМИ ЭЛЕМЕНТАМИ ИЗ КАССЕТЫ С КРЕПЕЖНЫМИ ЭЛЕМЕНТАМИ И ИХ ПРОДВИЖЕНИЯ | 2014 |
|
RU2678017C1 |
| АППАРАТ, ПЕРЕМЕЩАЕМЫЙ ДАВЛЕНИЕМ В ПОЛОСТИ ТЕЛА | 2005 |
|
RU2346708C2 |
Группа изобретений относится к медицине. Устройство для продвижения зонда содержит удлиненную гибкую трубку, определяющую центральную полость, выполненную с размерами, обеспечивающими возможность ее размещения в биологическом или конструкционном тракте, и имеющую проксимальный конец и дистальный конец; приводной механизм, соединенный с проксимальным концом; столб жидкости, продолжающийся в центральной полости от проксимального до дистального конца, и средство смещения, расположенное на дистальном конце и выполненное с возможностью способствовать проксимальному перемещению столба жидкости в ответ на дистальное перемещение столба жидкости. Приводной механизм выполнен с возможностью вызывать возвратно-поступательное перемещение столба жидкости в трубке для придания трубке импульса движения вперед и тем самым способствовать продвижению по меньшей мере дистального конца трубки в тракте, когда по меньшей мере дистальный конец размещен в пределах части тракта. Раскрыт способ продвижения зонда, осуществляемый с помощью этого устройства. Технический результат состоит в обеспечении дистанционного управления перемещением зонда. 2 н. и 13 з.п.ф-лы, 44 ил.
1. Устройство (100) для продвижения зонда, содержащее:
удлиненную гибкую трубку (140), определяющую центральную полость (141), выполненную с размерами, обеспечивающими возможность ее размещения в биологическом или конструкционном тракте, и имеющую проксимальный конец (142) и дистальный конец (144);
приводной механизм (130), соединенный с проксимальным концом (142) трубки (140);
столб (156) жидкости, продолжающийся в центральной полости от проксимального конца (142) до дистального конца (144); и
средство (550, 2150, 2250, 2350, 2450, 2550, 2750, 2950, 3050, 3150, 3250, 3450, 3650) смещения, расположенное на дистальном конце (144) и выполненное с возможностью способствовать проксимальному перемещению столба (156) жидкости в ответ на дистальное перемещение столба (156) жидкости,
при этом приводной механизм (130) выполнен с возможностью вызывать возвратно-поступательное перемещение столба (156) жидкости в трубке (140) для придания трубке (140) импульса движения вперед и тем самым способствовать продвижению по меньшей мере дистального конца (144) трубки (140) в тракте, когда по меньшей мере дистальный конец (144) размещен в пределах части тракта.
2. Устройство (100) по п.1, в котором трубка (140) имеет периодические отклонения формы, образованные на наружной поверхности трубки (140) вдоль по меньшей мере части трубки (140).
3. Устройство (100) по п.2, в котором:
(i) периодические отклонения формы продолжаются по окружности вокруг трубки (140); и/или
(ii) периодические отклонения формы выполнены по проксимально обращенной схеме «елочки».
4. Устройство (100) по п.1, в котором наружная поверхность трубки (140) выполнена с возможностью сопротивления перемещению трубки (140) в проксимальном направлении.
5. Устройство (100) по п.1, в котором внутренняя поверхность трубки (140) выполнена с возможностью усиления сопротивления перемещению столба (156) жидкости через трубку (140) в направлении вперед.
6. Устройство (100) по п.5, в котором:
(i) внутренняя поверхность трубки (140) содержит внутренние периодические отклонения формы вдоль по меньшей мере секции трубки (140), дистальной относительно проксимального конца (142);
(ii) внутренние периодические отклонения формы выполнены по проксимально обращенной схеме «елочки».
7. Устройство (100) по п.1, включающее один или более из следующих признаков:
(i) жидкость столба (156) жидкости имеет плотность, примерно равную или выше плотности воды,
(ii) приводной механизм (130) выполнен с возможностью придания проксимальному концу столба (156) жидкости скорости определенного профиля (30, 34) для усиления перемещения вперед трубки (140) в тракте; и
профиль (30, 34) скорости содержит по меньшей мере одну из составляющих:
участок постепенного ускорения в первой части (31) перемещения вперед столба (156) жидкости;
участок резкого снижения скорости во второй части (32) перемещения вперед столба (156) жидкости, которая следует за первой частью (31) перемещения вперед;
участок резкого ускорения в первой части (36) перемещения назад столба (156) жидкости; и
участок постепенного снижения скорости во второй части (36) перемещения назад столба (156) жидкости, которая следует за первой частью (35) перемещения назад; при этом
(iii) приводной механизм содержит поршень (352, 1652, 1852, 1952, 2052) и ведущее звено (324, 1654, 1854, 1954, 2054), выполненное с возможностью вызывать повторяющиеся продвижение вперед и отвод назад столба (156) жидкости в трубке (140);
(iv) приводной механизм содержит поршень (352, 1652, 1852, 1952, 2052) и ведущее звено (324, 1654, 1854, 1954, 2054), выполненное с возможностью вызывать повторяющиеся продвижение вперед и отвод назад столба (156) жидкости в трубке (140), и по меньшей мере одно из следующего:
приводной механизм (130) выполнен с возможностью заставлять поршень (352, 1652, 1852, 1952, 2052) резко снижать скорость к концу каждого хода поршня (352, 1652, 1852, 1952, 2052); или
приводной механизм (130) выполнен с возможностью заставлять поршень (352, 1652, 1852, 1952, 2052) резко ускоряться от конца каждого хода поршня (352, 1652, 1852, 1952, 2052);
(v) внутренний диаметр трубки (140) уменьшается в дистальном направлении;
(vi) дополнительно предусмотрен зонд (160), расположенный на дистальном конце (144) трубки (140);
(vii) дополнительно предусмотрено устройство (474) для визуализации, расположенное на дистальном конце (144) трубки (140);
(viii) тракт представляет собой сосудистый или пищеварительный тракт; или
(ix) тракт представляет собой тракт некоторого элемента конструкции.
8. Устройство (100) по п.1, дополнительно содержащее гибкую мембрану (554, 3654) или подвижный элемент (2154, 2254, 2354, 2454, 2554, 2754, 2954, 3054, 3154, 3254, 3454) на дистальном конце (144) для замыкания дистального конца столба (156) жидкости.
9. Устройство (100) по п.8, в котором дистальный конец (144) трубки (14) вмещает в себя сжимаемый объем (3656) текучей среды, ограничиваемый трубкой (140), гибкой мембраной (3654) и другой мембраной (3680), расположенной дистально от гибкой мембраны (3654).
10. Устройство (100) по п.1, дополнительно содержащее зонд (160), расположенный на дистальном конце (144) трубки (140), и множество каналов (340, 342, 1462, 1562), продолжающихся вдоль трубки (140) и соединенных с зондом (160).
11. Устройство (100) по п.10, включающее по меньшей мере один из следующих признаков:
(i) множество каналов (340, 342) содержат по меньшей мере один электрический канал (342), продолжающийся вдоль трубки (140) и соединенный с зондом (160) для выполнения по меньшей мере одного из действий по передаче и приему сигналов на зонд (160) или от зонда (160);
(ii) множество каналов (340, 342) содержат по меньшей мере один из каналов подачи воздуха, подачи воды и взятия биопсии;
(iii) по меньшей мере один из каналов (340, 342) проходит по спирали вдоль по меньшей мере части трубки (140);
(iv) множество каналов (340, 342) проходят в центральной полости (141); или
(v) дополнительно содержащее вспомогательную полость (1464, 1564), продолжающуюся в трубке (140), при этом каналы (340, 342) проходят в вспомогательной полости (1464, 1564) вдоль по меньшей мере части трубки (140).
12. Способ продвижения зонда (160), включающий:
расположение дистального конца (144) удлиненной гибкой трубки (140) по меньшей мере частично в пределах конца биологического тракта или конструкционного тракта, при этом трубка определяет центральную полость (141), выполнена с размерами, обеспечивающими возможность ее размещения в тракте, и содержит столб (156) жидкости, продолжающийся в центральной полости (141) от проксимального конца (142) трубки (140) до дистального конца (144), причем зонд (160) расположен на дистальном конце (144) трубки (140); и
управление приводным механизмом (130), чтобы вызвать продвижение столба (156) жидкости в трубке (140) для придания трубке (140) импульса движения вперед и тем самым содействовать продвижению по меньшей мере дистального конца (144) трубки (140) в тракте;
при этом этап управления включает управление поршнем (352, 1652, 1852, 1952, 2052) и ведущим звеном (342, 1654, 1854, 1954, 2054), чтобы вызвать повторяющиеся продвижение вперед и отвод назад столба (156) жидкости; и
используют средство (550, 2150, 2250, 2350, 2450, 2550, 2750, 2950, 3050, 3150, 3250, 3450, 3650) смещения, расположенное на дистальном конце (144), способствующее проксимальному перемещению столба (156) жидкости в ответ на дистальное перемещение столба (156) жидкости.
13. Способ по п.12, в котором этап управления включает придание проксимальному концу столба (156) жидкости скорости определенного профиля (30, 34) для усиления перемещения вперед трубки (140) в тракте (156).
14. Способ по п.13, в котором профиль (30, 34) скорости содержит по меньшей мере одну из составляющих:
участок постепенного ускорения в первой части (31) перемещения вперед столба (156) жидкости;
участок резкого снижения скорости во второй части (32) перемещения вперед столба (156) жидкости, которая следует за первой частью (31) перемещения вперед;
участок резкого ускорения в первой части (35) перемещения назад столба (156) жидкости; и
участок постепенного снижения скорости во второй части (36) перемещения назад столба (156) жидкости, которая следует за первой частью (35) перемещения назад.
15. Способ по любому из пп.12-14, включающий по меньшей мере один из следующих признаков:
(i) на этапе управления заставляют поршень (352, 1652, 1852, 1952, 2052) резко снизить скорость к концу каждого хода поршня (352, 1652, 1852, 1952, 2052);
(ii) на этапе управления заставляют поршень (352, 1652, 1852, 1952, 2052) резко ускориться от конца каждого хода поршня (352, 1652, 1852, 1952, 2052);
(iii) дополнительно обеспечивают контуры вдоль внешней стороны трубки (140) для сопротивления перемещению трубки (140) в проксимальном направлении в тракте в процессе работы;
(iv) дополнительно обеспечивают контуры вдоль внутренней стороны трубки (140) для сопротивления перемещению столба (156) жидкости через трубку (140) в дистальном направлении;
(v) зонд (160) содержит устройство (474) для визуализации, при этом способ дополнительно включает захват изображений в тракте с использованием устройства (474) для визуализации;
(vi) зонд (160) содержит устройство (474) для визуализации, при этом способ дополнительно включает захват изображений в тракте с использованием устройства (474) для визуализации и передачу данных изображения, соответствующих захваченным изображениям, в систему, выполненную с возможностью обработки изображений и вывода их на устройство отображения; или
(vii) по меньшей мере один электрический канал (342) продолжается вдоль трубки (140) для выполнения по меньшей мере одного из действий по передаче и приему сигналов на зонд (160) или от зонда (160), при этом передачу выполняют с использованием по меньшей меры одного электрического канала (342).
| US 2002058951 A1, 16.05.2002 | |||
| US 4207872 А, 17.06.1980 | |||
| US 4934786 A, 19.06.1990 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| ГИБКИЙ ЗОНДR П Тl^.'t ^ ^ ^фрП y^^^tty'si?;...» *-^ ,, -' | 1972 |
|
SU429345A1 |

