Область техники, к которой относится изобретение
Изобретение относится к способу для применения в сочетании со средством визуализации, для направления иглообразного объекта вдоль траектории, соединяющей заданную точку ввода с заданной целевой точкой в теле во время чрескожных вмешательств.
Изобретение дополнительно относится к устройству для выполнения упомянутого способа.
Уровень техники изобретения
В заявке на патент США 2007/0135708 предложено устройство направления иглы, применяемое медицинским специалистом для направления иглы по направлению к цели вдоль траектории введения иглы. Для определения местоположения цели можно применять способ, который использует флюороскоп. Устройство направления иглы выполнено, по меньшей мере, частично, из рентгеноконтрастного материала и может наблюдаться на дисплее флюороскопа, когда упомянутое устройство расположено по оси пучка флюороскопа, испускаемого излучателем флюороскопа к приемнику флюороскопа. Медицинский специалист использует известную информацию об относительном расположении устройства направления иглы и оси пучка флюороскопа для направления иглы по направлению к цели.
Методы, описанные в заявке на патент США 2007/0135708, не допускают управления угловой ориентацией иглы в трехмерном пространстве во время перемещения иглы от точки ввода до целевой точки.
Известные методы отображают информацию, относящуюся к угловой ориентации иглы в трехмерном пространстве, на двухмерное пространство, а именно плоскость наблюдения, посредством чего врач отслеживает продвижение иглы. Углы поворота иглы относительно оси, параллельной или содержащейся в плоскости наблюдения, невозможно определить и различить в плоскости наблюдения и, следовательно, все еще не управляемы врачом. Данная неуправляемость может привести к отклонению иглы относительно траектории от точки ввода до целевой точки. Следовательно, иглой могут быть повреждены жизненно важные органы.
В патенте США 4917111 содержится описание хирургического инструмента для наведения и формирования отверстия, предназначенного для применения, например, при имплантации блокирующих штифтов или чего-то подобного в кости. Стержень можно направлять вдоль направляющего элемента. Устройство содержит два кольцевых элемента, которые концентрически расположены вокруг направляющего отверстия для совпадающего изображения на экране преобразователя.
Сущность изобретения
Целью изобретения является создание системы управления угловой ориентацией иглообразного объекта в трехмерном пространстве с целью точного перемещения иглообразного объекта вдоль траектории от точки ввода до целевой точки в теле.
Данная цель достигается с помощью системы в соответствии с изобретением, при этом упомянутая система содержит средство визуализации и устройство для управления угловой ориентацией иглообразного объекта, при его одновременном перемещении вдоль траектории от заданной точки ввода до заданной точки назначения в теле во время чрезкожного вмешательства, причем упомянутое устройство содержит направляющий блок и опорный блок для выполнения функции опоры для направляющего блока, причем упомянутый опорный блок обеспечивает пару параллельных контрольных плоскостей, которые являются, по меньшей мере, частично обнаружимыми с помощью средства визуализации, причем направляющий блок образует направляющую ось, вдоль которой можно поступательно перемещать иглообразный объект, и причем направляющая ось, по существу, перпендикулярна упомянутой паре параллельных контрольных плоскостей, и причем упомянутое средство визуализации содержит фокус и детектор, причем система выполнена с возможностью установки опорного блока в непосредственной близости от тела, создания плоскости визуализации с помощью средства визуализации, причем угловая ориентация плоскости визуализации определяет базу отсчета для угловой ориентации пары параллельных контрольных плоскостей, причем упомянутая плоскость визуализации продолжается от фокуса к детектору и перпендикулярна траектории от точки ввода до целевой точки, и для определения отклонения между угловыми ориентациями пары параллельных контрольных плоскостей и плоскости визуализации с помощью средства визуализации посредством обеспечения боковой проекции опорного блока для приведения направляющей оси в согласованное положение с траекторией от точки ввода до целевой точки посредством выравнивания пары параллельных контрольных плоскостей с плоскостью визуализации, и для поступательного перемещения иглообразного объекта вдоль направляющей оси.
В данном случае, под средством визуализации подразумевается медицинское устройство визуализации, способное обеспечивать двумерную проекцию в направлении, по существу, перпендикулярном направлению продвижения иглообразного объекта, например рентгеновское устройство. Установка опорного блока в непосредственной близости от тела включает установку опорного блока на теле. В данном случае, опорный блок может быть установлен так, чтобы полностью касаться тела.
В качестве альтернативы, опорный блок опирается на тело в, по меньшей мере, трех местах, возможно, с помощью дополнительных опорных элементов.
Как упоминалось выше, средство визуализации создает плоскость визуализации. Плоскость визуализации продолжается от фокуса к детектору средства визуализации.
Ориентация плоскости визуализации служит базой отсчета для ориентации пары параллельных контрольных плоскостей. При этом ориентация плоскости визуализации является такой, что плоскость визуализации, по существу, перпендикулярна траектории от точки ввода до целевой точки. А именно, направляющая ось и пара параллельных плоскостей, по существу, взаимно перпендикулярны. Следовательно, если плоскость визуализации создана, по существу, перпендикулярно вышеупомянутой траектории, то направляющая ось логически соответствует траектории от точки ввода до целевой точки в случае, когда ориентация пары параллельных плоскостей соответствует ориентации плоскости визуализации.
Посредством применения дисплея средства визуализации медицинский специалист может проверять, совпадают ли ориентации, соответствующие паре параллельных плоскостей и плоскости визуализации. А именно, параллельные контрольные плоскости, по меньшей мере, частично обнаружимы с помощью средства визуализации. То есть параллельные контрольные плоскости, по меньшей мере, частично изготовлены из рентгеноконтрастного материала, или, в качестве альтернативы, упомянутые плоскости, по меньшей мере, частично покрыты рентгеноконтрастной краской. При этом рентгеноконтрастность относится к способности материала препятствовать пропусканию сквозь него электромагнитного излучения. В случае, когда пара параллельных контрольных плоскостей выровнена с плоскостью визуализации, следовательно, в случае, когда пара параллельных контрольных плоскостей достигла точной угловой ориентации, боковая проекция опорного блока будет наблюдаться на дисплее средства визуализации в виде четко очерченной поверхности. Фактически, можно обнаруживать отклонение между угловой ориентацией пары параллельных контрольных плоскостей и угловой ориентацией плоскости визуализации. А именно, повороты пары параллельных контрольных плоскостей относительно оси, имеющей, по меньшей мере, одну составляющую, параллельную плоскости визуализации, или содержащуюся в плоскости визуализации, вызовут превращение четко очерченной поверхности в поверхность, имеющую, по существу, размытые криволинейные границы. Благодаря паре параллельных контрольных плоскостей различимость отклонения между ориентацией плоскости визуализации и ориентацией пары параллельных плоскостей в значительной степени усиливается. Последняя особенность дает возможность медицинскому специалисту обнаруживать упомянутое отклонение. В дальнейшем медицинский специалист уточняет угловую ориентацию пары параллельных контрольных плоскостей посредством манипуляции вручную опорным блоком. С этой целью медицинский специалист может интерактивно применять визуальную обратную связь в реальном времени, обеспеченную дисплеем средства визуализации.
Посредством согласования ориентаций пары параллельных контрольных плоскостей и плоскости визуализации направляющую ось выравнивают с траекторией от точки ввода до целевой точки. При дальнейшем поступательном перемещении иглообразного объекта вдоль направляющей оси иглообразный объект точно перемещается вдоль траектории от точки вода до целевой точки. При этом направляющий блок гарантирует, что перемещение иглообразного объекта будет соответствовать направляющей оси и, следовательно, упомянутой траектории от точки ввода до целевой точки.
Способ в соответствии с изобретением ограждает оператора от нескольких изменений положения плоскости визуализации и ориентации по углу установки с целью оценки точности ориентации иглообразного объекта относительно траектории, соединяющей точку ввода и целевую точку. Из опыта следует, что непрерывное изменение, например, геометрической формы С-образной консоли в случае поворотного рентгеновского устройства, является исключительно громоздкой и трудоемкой работой. Следовательно, способ в соответствии с изобретением обеспечивает не только эффективное управление угловой ориентацией иглообразного объекта, но дополнительно предоставляет медицинскому специалисту эффективный и интуитивный способ работы.
В варианте осуществления способа в соответствии с изобретением, иглообразный объект вставляют в направляющий блок. При этом игла не обязательно должна уже содержаться в направляющем блоке.
Дополнительной целью изобретения является создание устройства управления угловой ориентацией иглообразного объекта в трехмерном пространстве с целью точного перемещения иглообразного объекта вдоль траектории от точки ввода до целевой точки в теле.
Данная цель достигается с помощью устройства в соответствии с изобретением, которое характеризуется тем, что содержит опорный блок для выполнения функции опоры для направляющего блока, при этом опорный блок обеспечивает пару параллельных контрольных плоскостей, которые, по меньшей мере, частично обнаружимы с помощью средства визуализации, причем упомянутый направляющий блок создает направляющую ось, вдоль которой можно перемещать иглообразный объект, и причем направляющая ось, по существу, перпендикулярна упомянутой паре параллельных контрольных плоскостей. Возможность обнаружения пары параллельных контрольных плоскостей с помощью средства визуализации обеспечена посредством, по меньшей мере, частичного изготовления параллельных контрольных плоскостей из рентгеноконтрастного материала или посредством, по меньшей мере, частичного покрытия упомянутых плоскостей рентгеноконтрастной краской. Направляющий блок изготовлен так, что обеспечивается возможность перемещения иглообразного объекта только вдоль направляющей оси.
В варианте осуществления устройства в соответствии с изобретением, опорный блок задает направляющее отверстие.
В дополнительном варианте осуществления устройства в соответствии с изобретением, опорный блок является, по существу, плоским. В результате повышается возможность обнаружения отклонений между ориентацией, соответствующей плоскости визуализации, и ориентацией пары параллельных контрольных плоскостей. А именно, по существу, плоская геометрическая форма опорного блока усилит различимость поворота пары параллельных контрольных плоскостей по отношению к оси, содержащейся в плоскости визуализации или параллельной данной плоскости.
В дополнительном варианте осуществления устройства в соответствии с изобретением, опорный блок является равномерно дисковидным телом. При этом данное тело считается дисковидным в случае, когда отношение его радиуса и его толщины превышает 10. Отклонение между ориентацией пары параллельных контрольных плоскостей, заданных сторонами дисковидного тела, и ориентация плоскости визуализации может однозначно определяться медицинским специалистом при наблюдении дисплея, содержащегося в средстве визуализации. А именно, в случае, когда пара параллельных контрольных плоскостей выровнена с плоскостью визуализации, будет наблюдаться четко очерченная прямоугольная поверхность. Отклонение будет вызывать превращение четко очерченной прямоугольной поверхности в эллипсовидную поверхность с размытыми краями.
В дополнительном варианте осуществления устройства в соответствии с изобретением, направляющая ось продолжается через центр тяжести равномерного диска.
В дополнительном варианте осуществления устройства в соответствии с изобретением, направляющий блок содержит направляющий цилиндр, при этом направляющий цилиндр охватывает направляющую ось, и направляющий цилиндр имеет направляющий диаметр, согласованный с диаметром иглообразного объекта. В данном случае, направляющий диаметр немного больше диаметра иглообразного объекта. С одной стороны, направляющий цилиндр должен обеспечивать, чтобы иглообразный объект поступательно перемещался вдоль направляющей оси четко заданным и воспроизводимым образом, с другой стороны, направляющий цилиндр должен обеспечивать достаточно малый уровень силы трения, чтобы позволить врачу плавно перемещать иглообразный объект вдоль направляющей оси.
В дополнительном варианте осуществления устройства в соответствии с изобретением, направляющий блок содержит дополнительную направляющую ось.
В дополнительном варианте осуществления устройства в соответствии с изобретением, направляющий блок содержит дополнительный направляющий цилиндр, при этом дополнительный направляющий цилиндр охватывает дополнительную направляющую ось, и дополнительный направляющий цилиндр имеет дополнительный направляющий диаметр, согласованный с диаметром дополнительного иглообразного объекта. В результате направляющий блок позволяет направлять иглообразные объекты, имеющие различные диаметры.
Дополнительной целью изобретения является создание системы управления угловой ориентацией иглообразного объекта в трехмерном пространстве с целью точного перемещения иглообразного объекта вдоль траектории от точки ввода до целевой точки в теле.
Данная цель достигается с помощью системы в соответствии с изобретением, которая содержит средство визуализации и устройство в соответствии с изобретением.
Краткое описание чертежей
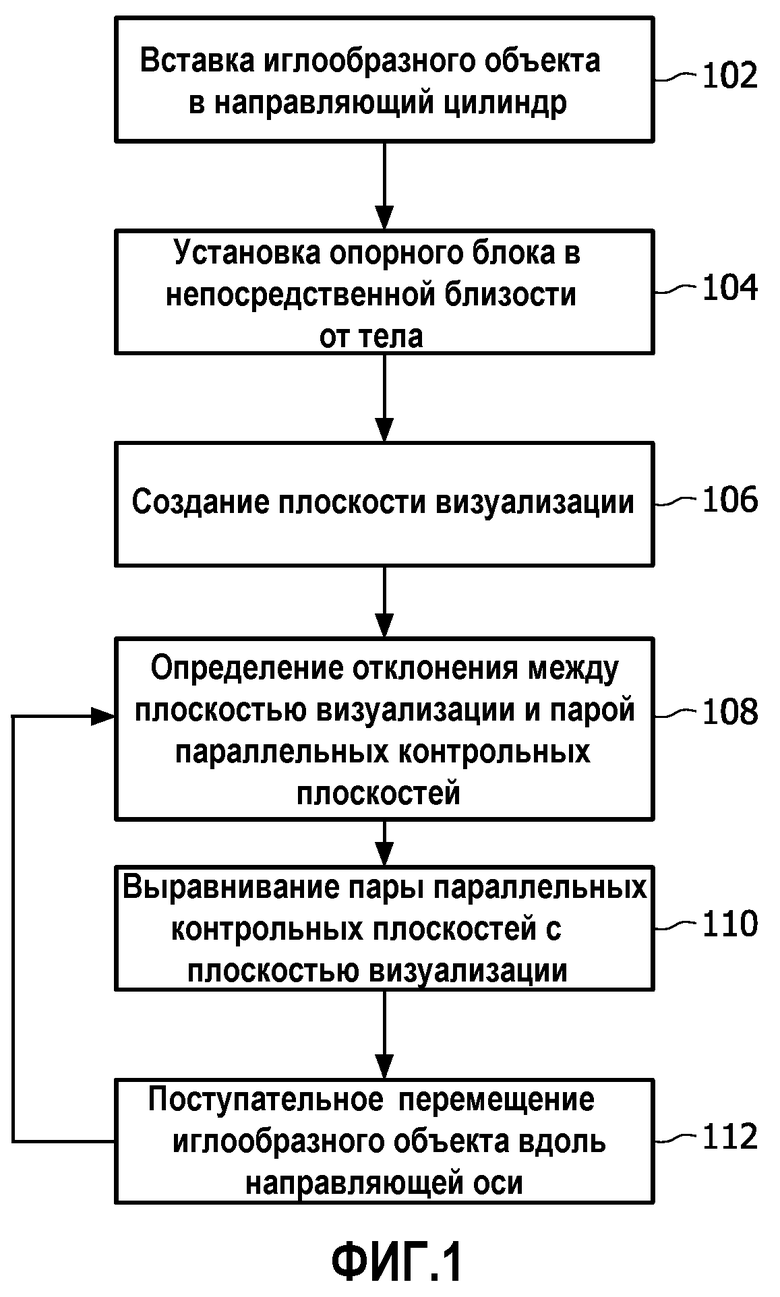
Фиг.1 - схематичное изображение варианта осуществления способа в соответствии с изобретением.
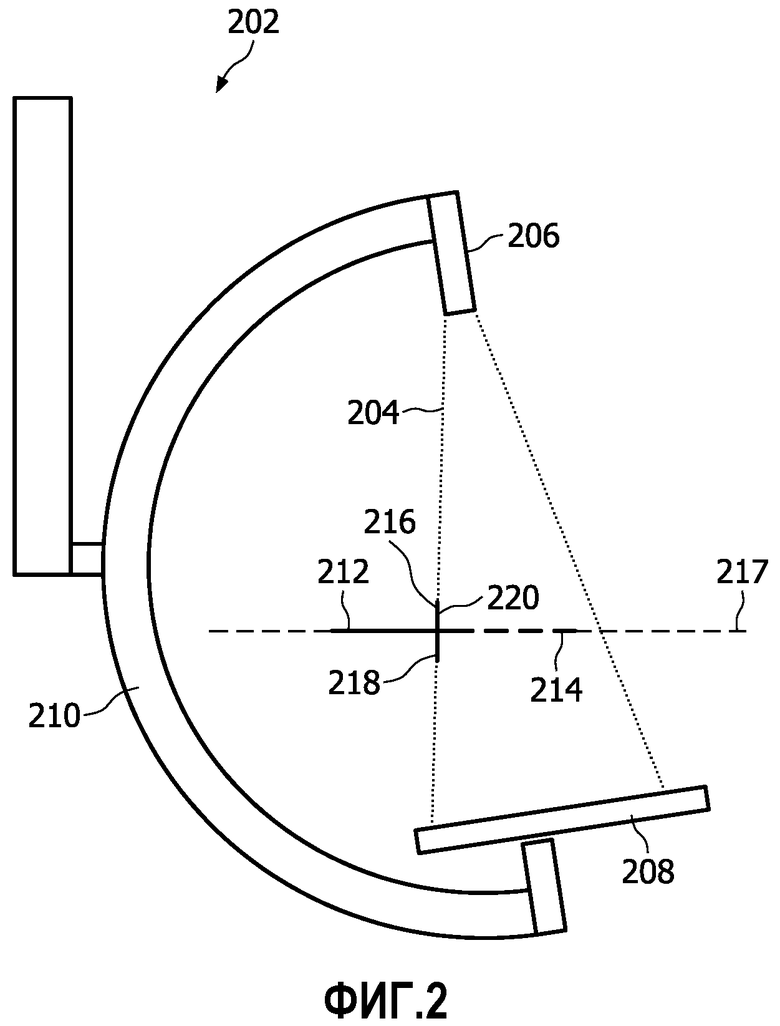
Фиг.2 - схематичное изображение создания плоскости визуализации на поворотном рентгеновском устройстве с учетом конкретной траектории от точки ввода до целевой точки.
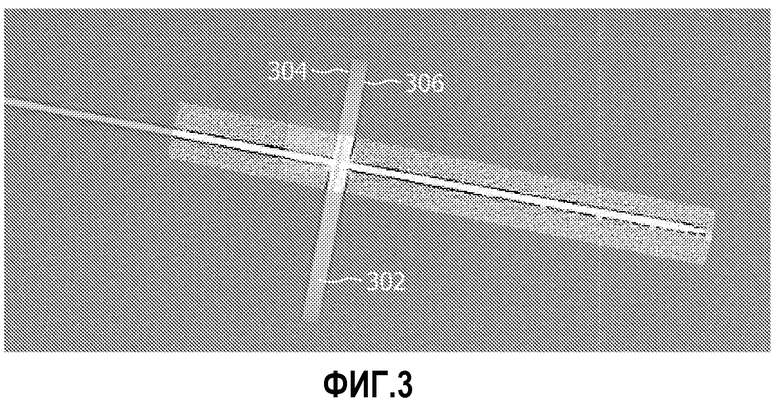
Фиг.3 - изображение опорного блока, наблюдаемого на дисплее, содержащемся в средстве визуализации, в случае, когда пара параллельных контрольных плоскостей, обеспеченных устройством в соответствии с изобретением, выровнена с плоскостью визуализации.
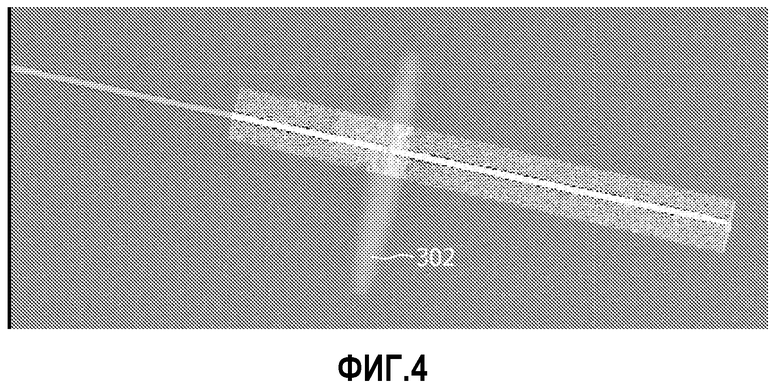
Фиг.4 - изображение опорного блока, наблюдаемого на дисплее, содержащемся в средстве визуализации, в случае, когда существует различимое отклонение между угловыми ориентациями плоскости визуализации и пары контрольных плоскостей, определенное с помощью устройства в соответствии с изобретением.
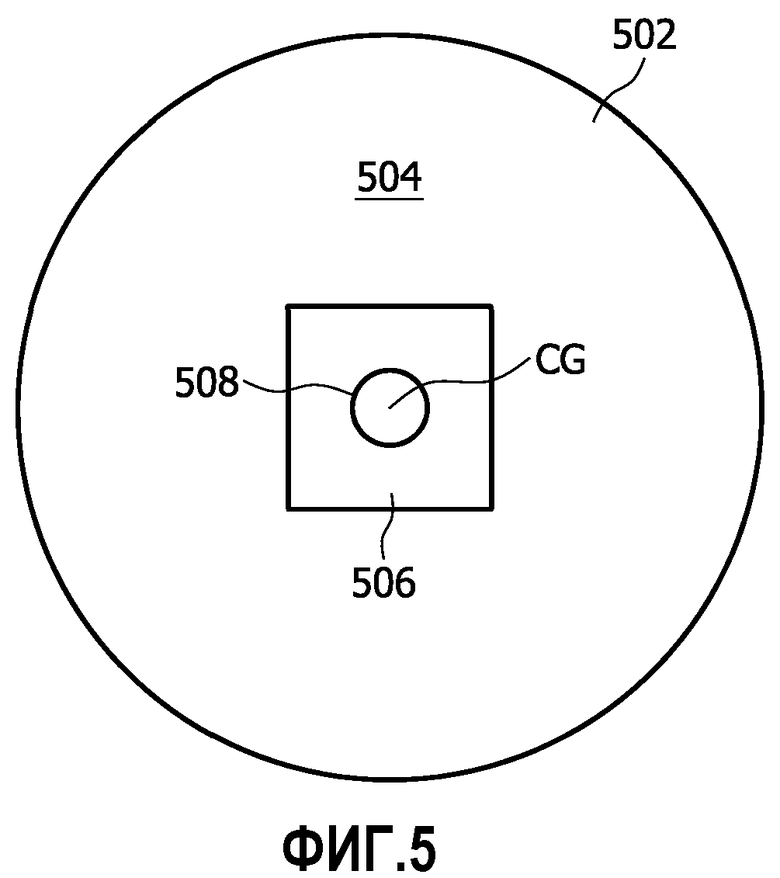
Фиг.5 - схематичное изображение первого варианта осуществления устройства в соответствии с изобретением на виде спереди.
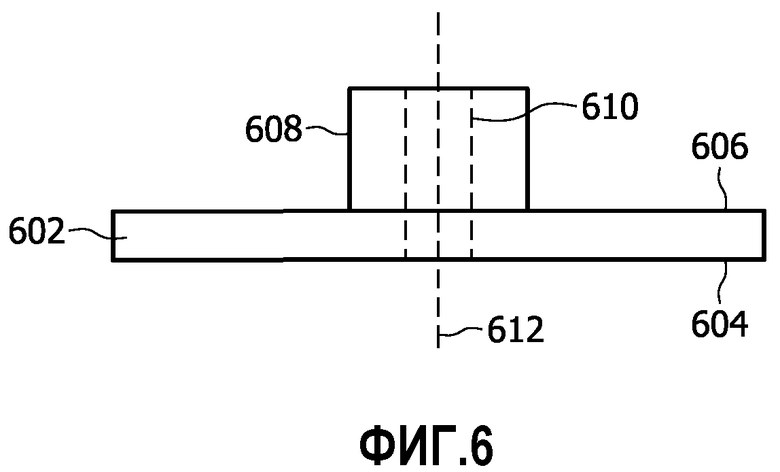
Фиг.6 - схематичное изображение первого варианта осуществления устройства в соответствии с изобретением на виде сбоку.
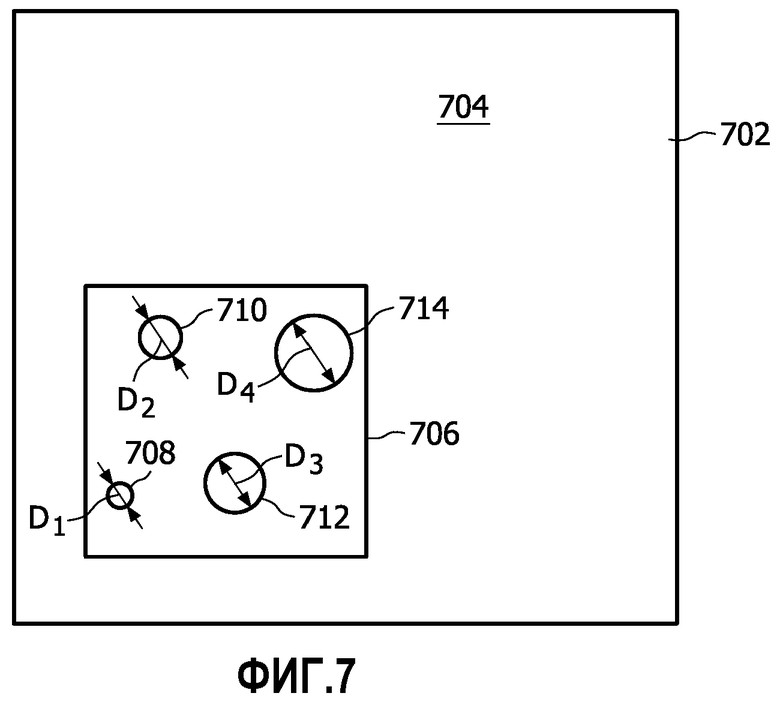
Фиг.7 - схематичное изображение второго варианта осуществления устройства в соответствии с изобретением на виде спереди.
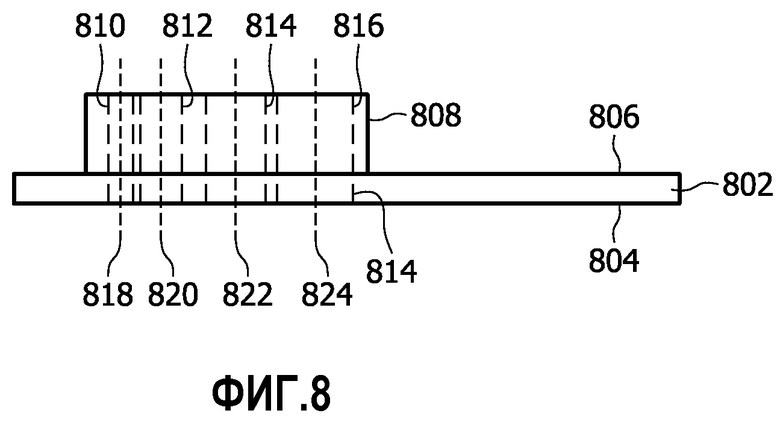
Фиг.8 - схематичное изображение второго варианта осуществления устройства в соответствии с изобретением на виде сбоку.
Фиг.9 - схематичное изображение варианта осуществления системы в соответствии с изобретением.
Подробное описание вариантов осуществления
На фиг.1 изображена блок-схема последовательности операций, представляющая вариант осуществления способа в соответствии с изобретением. Способ предназначен для перемещения иглообразного объекта вдоль траектории от заданной точки ввода до заданной целевой точки в теле во время чрезкожного вмешательства. Первый этап 102 содержит вставку иглообразного объекта в направляющий цилиндр, содержащийся в направляющем блоке, при этом направляющий блок опирается на опорный блок. Перед этим, как иглообразный объект, так и опорный блок, вместе с направляющим блоком, или, по меньшей мере, направляющий блок, должны быть очищены от своей стерильной упаковки. Второй этап 104 содержит установку иглообразного объекта на точке ввода и, в дальнейшем, установку опорного блока в непосредственной близости от тела. Следует отметить, что этап 102 и этап 104 можно менять местами между собой, т.е. опорный блок можно устанавливать в непосредственной близости от тела перед вставкой иглообразного объекта в направляющий цилиндр. Третий этап 106 содержит создание плоскости визуализации с использованием средства визуализации, например, рентгеновского излучения. Как пояснялось выше, ориентация плоскости визуализации обеспечивает базу отсчета для угловой ориентации пары параллельных контрольных плоскостей, заданных опорным блоком. В данном случае, плоскость визуализации создают перпендикулярно траектории от точки ввода до целевой точки, при условии перпендикулярной ориентации направляющей оси относительно пары параллельных контрольных плоскостей.
На фиг.2 схематично показано поворотное рентгеновское устройство 202, создающее плоскость 204 визуализации, которая продолжается от фокуса 206 к детектору 208. Поворотное рентгеновское устройство содержит С-образную консоль 210, которая предназначена для определения угловой ориентации плоскости 204 визуализации. Иглообразный объект 212 перемещают вдоль траектории 214. Опорный блок 216 предназначен для выполнения функции опоры для направляющего блока (не показанного на фиг.2), при этом направляющий блок определяет направляющую ось 217. Опорный блок 216 снабжен парой параллельных плоскостей 218 и 220. Как пояснялось выше, направляющая ось 217 и пара параллельных контрольных плоскостей 218 и 220 взаимно перпендикулярны. Плоскость 204 визуализации создают так, что данная плоскость перпендикулярна траектории 214. Как видно из фиг.2, плоскость 204 визуализации и пара параллельных контрольных плоскостей 218 и 220 выровнены между собой. Следовательно, иглообразный объект 212 будет перемещаться точно вдоль траектории 214.
Как показано на фиг.1, четвертый этап 108 содержит определение отклонения угловых ориентаций пары параллельных контрольных плоскостей от плоскости визуализации. Как пояснялось выше, в случае, когда пара параллельных контрольных плоскостей выровнена с плоскостью визуализации, опорный блок будет наблюдаться на дисплее, содержащемся в средстве визуализации, в виде четко очерченной поверхности.
На фиг.3 показан опорный блок 302, наблюдаемый на дисплее, содержащемся в средстве визуализации, в случае, когда пара параллельных контрольных плоскостей 304 и 306 выровнена с плоскостью визуализации. В данном случае опорный блок 302 выполнен с использованием дисковидного тела. Как четко видно, сторона опорного блока 302 наблюдается в виде четко очерченной прямоугольной поверхности.
На фиг.4 изображен опорный блок 302, наблюдаемый на дисплее, содержащемся в средстве визуализации, в случае, когда существует заметное отклонение между угловыми ориентациями плоскости визуализации и парой параллельных контрольных плоскостей 304 и 306. Как хорошо видно, четко очерченная прямоугольная поверхность превратилась в эллипсовидную поверхность с размытыми краями из-за поворота пары параллельных контрольных плоскостей 304 и 306 относительно оси, содержащейся в плоскости визуализации или параллельной данной плоскости.
Как видно на фиг.1, пятый этап 110 содержит выравнивание пары параллельных контрольных плоскостей с плоскостью визуализации медицинским специалистом вручную, на основе визуальной обратной связи в реальном времени, обеспеченной дисплеем средства визуализации. Шестой этап 112 содержит перемещение иглообразного объекта вдоль направляющей оси посредством поступательного перемещения данного объекта через направляющий цилиндр, содержащийся в направляющем блоке. При этом на этапе 108 проверяют возникновение отклонений между угловыми ориентациями плоскости визуализации и пары параллельных контрольных плоскостей.
Фиг.5 отображает вид в плане первого варианта осуществления устройства в соответствии с изобретением. В данном случае опорный блок 502 является дисковидным телом. Опорный блок 502 определяет пару параллельных контрольных плоскостей, из которых показана плоскость 504. Дисковидное тело 502 изготовлено из рентгеноконтрастного материала, чтобы гарантировать различимость пары параллельных контрольных плоскостей для обзора на дисплее, содержащемся в средстве визуализации. Дисковидное тело 502 служит опорой для направляющего блока 506. Направляющий блок 506 содержит направляющий цилиндр 508, который определяет направляющую ось (не показанную на фиг.5), продолжающуюся через центр тяжести CG опорного блока 502.
На фиг.6 представлен вид сбоку первого варианта осуществления в соответствии с изобретением. Опорный блок 602 задает пару параллельных контрольных плоскостей 604 и 606. Контрольная плоскость 606 является наиболее подходящей для установки в непосредственной близости от тела или на нем. Направляющий блок 608 прикреплен к опорному блоку 602. Направляющий блок 608 содержит направляющий цилиндр 610, который определяет направляющую ось 612, перпендикулярную паре параллельных контрольных плоскостей 604 и 606.
На фиг.7 показан вид в плане второго варианта осуществления устройства в соответствии с изобретением. В данном случае опорный блок 702 является, по существу, плоским телом прямоугольной формы. Опорный блок 702 определяет пару параллельных контрольных плоскостей, из которых показана плоскость 704. Пара параллельных контрольных плоскостей покрыта рентгеноконтрастной краской с целью различимости на дисплее, содержащемся в средстве визуализации. Опорный блок 702 служит опорой для направляющего блока 706. Направляющий блок 706 содержит множество направляющих цилиндров, в данном примере четыре цилиндра, 708, 710, 712 и 714, имеющих направляющие диаметры D1, D2, D3 и D4, соответственно. В данном случае имеет место условие, что D1<D2<D3<D4. В результате направляющий блок предусматривает направление иглообразных объектов, имеющих различные диаметры иглообразных объектов, а именно диаметры иглообразных объектов, согласованные с направляющими диаметрами D1, D2, D3 и D4.
На фиг.8 представлен вид сбоку второго варианта осуществления устройства в соответствии с изобретением. По существу, плоский опорный блок 802 задает пару параллельных контрольных плоскостей 804 и 806. Контрольная плоскость 806 подлежит установке в непосредственной близости от тела или на теле. Направляющий блок 808 прикреплен к опорному блоку 802. Направляющий блок 808 содержит множество направляющих цилиндров 810, 812, 814 и 816, имеющих направляющие диаметры D1, D2, D3 и D4, соответственно. Направляющие цилиндры 810, 812, 814 и 816 определяют направляющие оси 818, 820, 822 и 824, соответственно. Все направляющие оси 818, 820, 822 и 824 перпендикулярны паре параллельных контрольных плоскостей.
На фиг.9 изображен вариант осуществления системы в соответствии с изобретением. Система 902 содержит устройство 904 в соответствии с изобретением и средство визуализации 906, например рентгеновское устройство.
Хотя изобретение представлено и подробно описано на чертежах и в вышеприведенном описании, чертежи и описание следует считать наглядными или примерными, а не ограничивающими. Изобретение не ограничено представленными вариантами осуществления. Следует отметить, что устройство в соответствии с изобретением и все его компоненты могут быть изготовлены путем применения, по существу, известных процессов и материалов. В формуле изобретения и описании выражение «содержащий» не исключает других элементов, и единственное число не исключает множественного числа. Никакие условные обозначения и позиции в формуле изобретения нельзя толковать как ограничение объема изобретения. Следует дополнительно отметить, что все возможные комбинации признаков, определенных формулой изобретения, входят в состав изобретения.

Группа изобретений относится к медицине и может быть использована во время чрескожного вмешательства в сочетании со средством визуализации, для управления угловой ориентацией иглообразного объекта при его перемещении от заданной точки ввода до заданной целевой точки в теле. Устройство содержит опорный блок для выполнения функции опоры для направляющего блока. Опорный блок обеспечивает пару параллельных контрольных плоскостей, которые являются, по меньшей мере, частично обнаружимыми с помощью средства визуализации. Направляющий блок создает направляющую ось, по существу, перпендикулярную паре параллельных контрольных плоскостей. Вдоль направляющей оси можно поступательно перемещать иглообразный объект. Угловая ориентация плоскости визуализации, созданной с помощью средства визуализации, определяет базу отсчета для угловой ориентации пары параллельных контрольных плоскостей. При выравнивании пары параллельных контрольных плоскостей с плоскостью визуализации направляющая ось оказывается в согласованном положении с траекторией от точки ввода до целевой точки. 2 н. и 7 з.п. ф-лы, 9 ил.
1. Система (902) для выравнивания иглы, содержащая средство (202) визуализации, и устройство для управления угловой ориентацией иглообразного объекта (212), при его одновременном перемещении вдоль траектории (214) от заданной точки ввода до заданной целевой точки в теле во время чрескожного вмешательства, при этом упомянутое устройство содержит направляющий блок (506, 706) и опорный блок (502, 602, 702, 802) для выполнения функции опоры для направляющего блока, причем опорный блок обеспечивает пару параллельных контрольных плоскостей (604, 606), которые являются, по меньшей мере, частично обнаружимыми с помощью средства (202) визуализации, причем направляющий блок образует направляющую ось (612, 818), вдоль которой способен поступательно перемещаться иглообразный объект, направляющая ось, по существу, перпендикулярна упомянутой паре параллельных контрольных плоскостей, и упомянутое средство визуализации содержит фокус (206) и детектор (208),
при этом система выполнена с возможностью
установки опорного блока (216) в непосредственной близости от тела,
создания плоскости (204) визуализации с помощью средства визуализации, причем угловая ориентация плоскости визуализации определяет базу отсчета для угловой ориентации пары параллельных контрольных плоскостей, причем данная плоскость визуализации продолжается от фокуса к детектору и перпендикулярна траектории от точки ввода до целевой точки, и
определения отклонения между угловыми ориентациями пары параллельных контрольных плоскостей и плоскостью визуализации с помощью средства визуализации посредством обеспечения боковой проекции опорного блока для
приведения направляющей оси в согласованное положение с траекторией от точки ввода до целевой точки посредством выравнивания пары параллельных контрольных плоскостей с плоскостью визуализации,
и поступательного перемещения иглообразного объекта вдоль направляющей оси.
2. Устройство для управления угловой ориентацией иглообразного объекта (212), при его одновременном перемещении вдоль траектории (214) от заданной точки ввода до заданной целевой точки в теле во время чрескожного вмешательства, при этом упомянутое устройство содержит опорный блок (502, 602, 702, 802) для выполнения функции опоры для направляющего блока (506, 706), причем опорный блок обеспечивает пару параллельных контрольных плоскостей (604, 606), направляющий блок создает направляющую ось (612, 818), вдоль которой способен перемещаться иглообразный объект, и направляющая ось, по существу, перпендикулярна упомянутой паре параллельных контрольных плоскостей, которые являются, по меньшей мере, частично обнаружимыми с помощью средства (202) визуализации для обеспечения боковой проекции опорного блока.
3. Устройство по п.2, в котором опорный блок задает направляющее отверстие.
4. Устройство по п.2, в котором опорный блок (502) является, по существу, плоским.
5. Устройство по п.2, в котором опорный блок является равномерно дисковидным телом.
6. Устройство по п.5, в котором направляющая ось продолжается через центр тяжести равномерно дисковидного тела.
7. Устройство по п.2, в котором направляющий блок содержит направляющий цилиндр (508, 708), при этом упомянутый направляющий цилиндр охватывает направляющую ось (612), и причем направляющий цилиндр имеет направляющий диаметр, согласованный с диаметром иглообразного объекта.
8. Устройство по п.2, в котором направляющий блок создает дополнительную направляющую ось (820, 822, 824).
9. Устройство по п.8, в котором направляющий блок содержит дополнительный направляющий цилиндр (710, 712, 714), при этом дополнительный направляющий цилиндр охватывает дополнительную направляющую ось, и причем дополнительный направляющий цилиндр имеет дополнительный направляющий диаметр, согласованный с диаметром дополнительного иглообразного объекта.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 4485815 A, 04.12.1984 | |||
| US 4917111 A, 17.04.1990 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 4638799 A, 27.01.1987 | |||
| Устройство для остеотомии суставного конца кости | 1984 |
|
SU1219057A1 |

