Изобретение относится к средствам спасения экипажей аварийных подводных объектов, преимущественно подводных лодок (ПЛ) в подводном положении с использованием спасательного глубоководного аппарата (СГА).
Известно стыковочное устройство (патент Франции №2264713, МПК B63G 6/40, публ. 17.10.75), выполненное в виде камеры посадки и присоса с опорным фланцем и уплотнением.
Известны и другие стыковочные устройства спасательного аппарата с подводным объектом (патент РФ №2157776, МПК B63G 8/40, 20.10.2000).
Известный способ стыковки СГА с аварийной ПЛ - гидростатический, при котором камера присоса СГА с помощью устройства центрирования и подтягивания опускается на комингс-площадку ПЛ, полость камеры присоса осушается и под действием перепада давлений забортного и внутри камеры присоса обеспечивается удержание СГА на комингс-площадке ПЛ.
При малых глубинах и больших скоростях течения воды гидростатический способ стыковки может быть недостаточно надежным, что приводит к необходимости установки дополнительно механического крепления камеры присоса СГА с комингс-площадкой аварийной ПЛ.
Задача изобретения заключается в установке механического крепления и быстрой дистанционной отдаче крепления посредством управления из отсека СГА.
Сущность изобретения поясняется фиг.1, 2, 3.
На фиг.1 представлен общий вид камеры посадки и присоса 1 с устройством центрирования и подтягивания 2 и установленным на нижнем фланце камеры устройством 3 для крепления подводного аппарата.
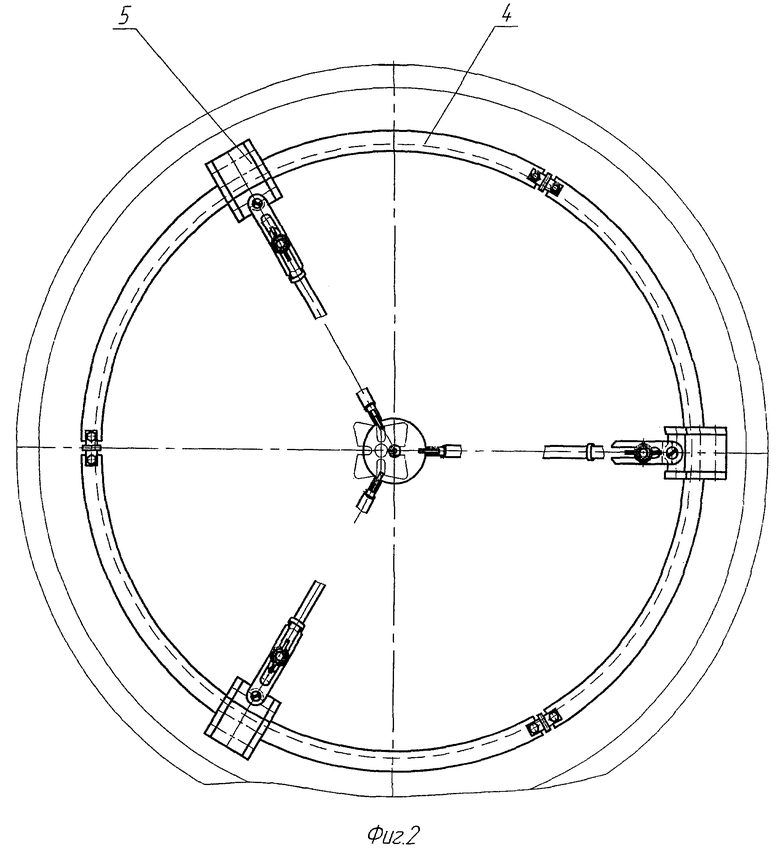
Устройство для крепления подводного аппарата на комингс-площадке (фиг.2) представляет собой опорное кольцо 4, состоящее из трех, скрепленных между собой частей с полым корпусом 5 на каждой части кольца.
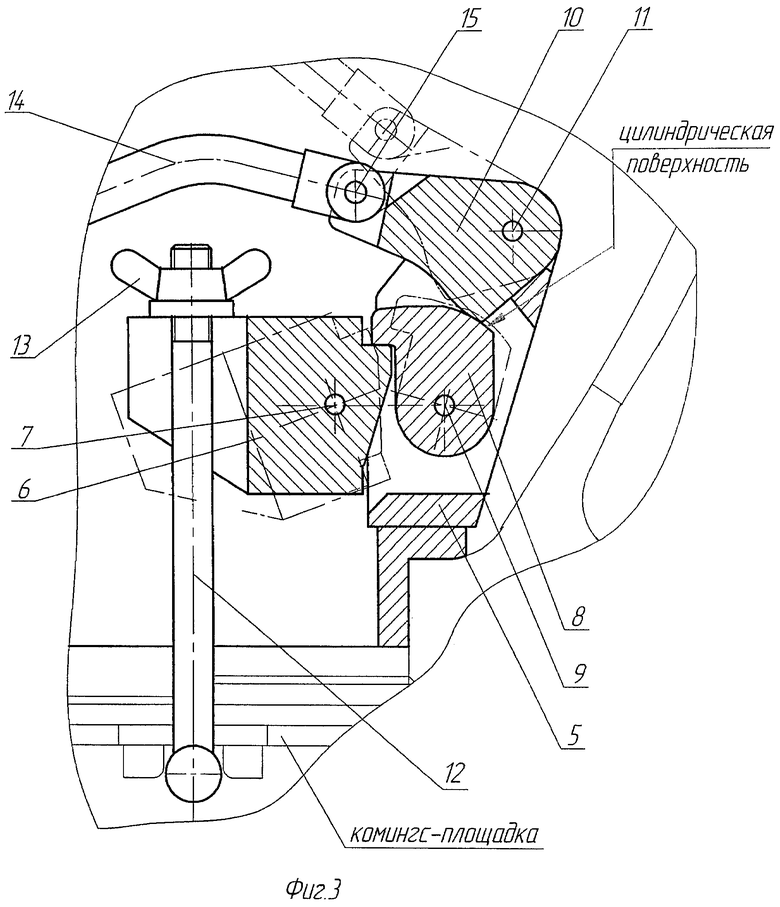
В полом корпусе 5 (фиг.3) установлена вилка 6, качающаяся в корпусе на горизонтальной оси 7 и направленная прорезью к центру опорного кольца, и затвор 8, поворачивающийся в корпусе на горизонтальной оси 9, расположенной в одной горизонтальной плоскости параллельно оси вилки, фиксирующий вилку в горизонтальном положении и имеющий цилиндрическую поверхность, ось которой параллельна оси вращения;
Затвор с «г»-образным выступом фиксирует вилку в горизонтальном положении. В свою очередь затвор фиксируется кулачком 10, поворачивающимся в корпусе на горизонтальной оси 11 и удерживающим по цилиндрической поверхности затвор от поворота.
Центры осей кулачка 10, затвора 8 и вилки 6 образуют тупоугольный треугольник, что обеспечивает фиксацию вилки 6 затвором 8.
Имеется вертикальный штырь 12, нижним концом закрепленный за паз на комингс-площадке подводного объекта, а верхним концом зафиксированный гайкой-барашком 13 в прорези вилки 6.
Разъемная тяга 14 представляет собой изогнутый рычаг, который одним концом закрепляется через горизонтальную ось 15 на кулачке 10. Тяга может располагаться в двух положениях: в исходном - вертикально, а в рабочем - соединяется другим концом, направленным к центру опорного кольца ниже точки крепления тяги на кулачке 10, одновременно с двумя другими тягами через горизонтальные оси на горизонтальной планке 16 с вертикальным штырем (фиг.1).
Работа механизма устройства осуществляется следующим образом: после посадки подводного аппарата на комингс-площадку подводного объекта, осушения, вентиляции полости камеры и ее присоса производится установка механизма устройства в рабочее положение. Прорези вилок 6 совмещаются с пазами на комингс-площадке путем поворота опорного кольца, штыри 12 закрепляются гайками-барашками 13, при этом разъемные тяги 14 находятся в исходном положении, т.е. вертикально.
После установки устройства производится выравнивание давления в полости камеры присоса с повышенным давлением в ПЛ.
После перехода экипажа ПЛ в СГА разъемные тяги 14 переводятся в горизонтальное положение и закрепляются с горизонтальной планкой 16 вертикальным штырем 12.
После закрытия нижней крышки СГА производится дистанционная отдача крепления устройства: захват устройства центрирования и подтягивания 2 (фиг.1) надевается на шаровую поверхность вертикального штыря 12 на горизонтальной планке 16 и перемещает его вверх по вертикали. Кулачки 10 (фиг.3) под действием разъемных тяг 14 поворачиваются, освобождая поворот затворов 8, которые, в свою очередь, освобождают поворот вилок 6. Штыри 12 с гайками 13 выходят из прорезей вилок 6. Камера СГА освобождается от закрепления на комингс-площадке ПЛ.
Устройство улучшает эксплуатационные характеристики подводного аппарата и повышает безопасность перевода спасаемого экипажа в подводный аппарат при повышенном давлении в отсеке подводного объекта за счет обеспечения механического крепления аппарата к подводному объекту и быстрой дистанционной отдачи его управлением из обитаемого отсека подводного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПАСАТЕЛЬНО-ТРАНСПОРТНЫЙ ПОДВОДНЫЙ АППАРАТ С УСТРОЙСТВАМИ КРЕПЛЕНИЯ К КОМИНГС-ПЛОЩАДКЕ ПОДВОДНОГО ОБЪЕКТА | 2012 |
|
RU2526365C2 |
| УСТРОЙСТВО КРЕПЛЕНИЯ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА К АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКЕ | 2021 |
|
RU2786059C1 |
| ПОДВОДНЫЙ АППАРАТ С ПОВОРОТНОЙ КАМЕРОЙ СТЫКОВКИ И ПРИСОСА И УСТРОЙСТВОМ ЦЕНТРИРОВАНИЯ И ПОДТЯГИВАНИЯ | 2011 |
|
RU2468961C1 |
| СЪЕМНО-ЗАКРЕПЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ, ПОДВОДНОГО ВЫПУСКА И ПРИЕМА СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА ПОДВОДНОЙ ЛОДКОЙ | 2014 |
|
RU2589500C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ПРОВЕРОК СПАСАТЕЛЬНОГО ЛЮКА С КОМИНГС-ПЛОЩАДКОЙ ПОДВОДНОЙ ЛОДКИ (МАКЕТ) | 2014 |
|
RU2550570C1 |
| СПОСОБ СПАСАНИЯ ПОДВОДНИКОВ ИЗ ОТСЕКОВ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ | 2022 |
|
RU2797933C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ПОДВОДНЫХ АППАРАТОВ ПОДВОДНОЙ ЛОДКОЙ | 2014 |
|
RU2551874C1 |
| УСТРОЙСТВО ДЛЯ СТЫКОВКИ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА С ПОДВОДНЫМ ОБЪЕКТОМ И СПОСОБ СТЫКОВКИ С ЕГО ИСПОЛЬЗОВАНИЕМ | 2004 |
|
RU2250858C1 |
| СПОСОБ СПАСЕНИЯ С АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ | 2002 |
|
RU2214344C1 |
| Спасательный подводный аппарат | 2018 |
|
RU2736236C2 |
Изобретение относится к средствам спасения экипажа аварийных подводных объектов, преимущественно подводных лодок, в подводном положении с использованием спасательного подводного аппарата. Устройство включает камеру стыковки в нижней части подводного аппарата с устройством центрирования и подтягивания к комингс-площадке подводного объекта. На внутреннем бурте нижнего опорного кольца камеры установлено съемное устройство для закрепления аппарата за комингс-площадку подводного объекта, включающее опорное кольцо, состоящее из трех частей с полым корпусом, в котором установлена вилка, фиксируемая от вращения затвором. В свою очередь затвор фиксируется кулачком, на котором подвижно закреплена разъемная тяга. Вертикальный штырь, зацепляемый за паз на комингс-площадке подводного объекта, фиксируется гайкой-барашком в прорези вилки. В исходном положении разъемная тяга располагается вертикально, а в рабочем - горизонтально и соединяется подвижно с горизонтальной планкой с вертикальным штырем, который заканчивается шаровой поверхностью с возможностью вертикального перемещения посредством захвата устройства центрирования и подтягивания. Технический результат заключается в улучшении эксплуатационных характеристик спасательного подводного аппарата и повышении безопасности перевода спасаемого экипажа в подводный аппарат. 3 ил.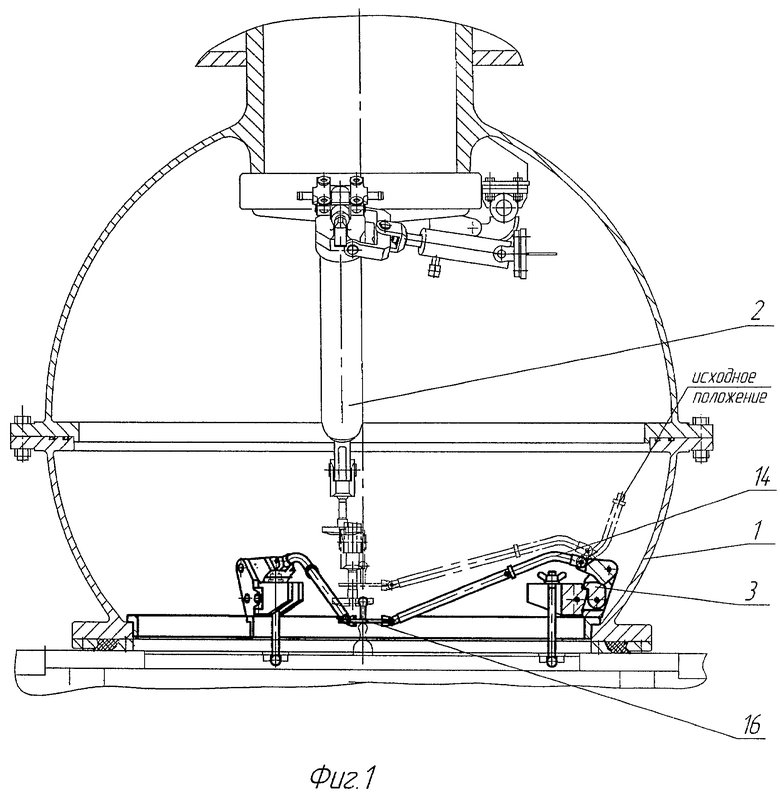
Устройство для крепления подводного аппарата за комингс-площадку подводного объекта, преимущественно аварийной подводной лодки, и дистанционной отдачи крепления, включающее камеру стыковки в нижней части подводного аппарата с устройством центрирования и подтягивания к комингс-площадке подводного объекта, отличающееся тем, что на внутреннем бурте нижнего опорного кольца камеры установлено съемное устройство для закрепления аппарата за комингс-площадку подводного объекта, включающее опорное кольцо из нескольких, например трех скрепленных между собой частей с установленным полым корпусом на каждой из частей кольца, вилку, качающуюся в полом корпусе на горизонтальной оси и направленную прорезью к центру опорного кольца, затвор, поворачивающийся в корпусе на горизонтальной оси, расположенной в одной горизонтальной плоскости параллельно оси вилки, с «г»-образным выступом с горизонтальной опорной поверхностью, фиксирующий вилку в горизонтальном положении и имеющий цилиндрическую поверхность, ось которой параллельна оси вращения, кулачок, поворачивающийся в корпусе на горизонтальной оси, образующей с осями затвора и вилки тупоугольный треугольник, и удерживающий по цилиндрической поверхности затвор от поворота, вертикальный штырь, нижним концом закрепленный за паз на комингс-площадке подводного объекта, а верхним концом зафиксированный гайкой-барашком в прорези вилки, разъемную тягу, одним концом закрепленную через горизонтальную ось на кулачке, при этом в исходном положении расположенную вертикально, а в рабочем - горизонтально с закреплением другого конца, направленного к центру опорного кольца ниже точки крепления тяги на кулачке и закрепленного одновременно с двумя другими тягами через горизонтальные оси на горизонтальной планке с вертикальным штырем, заканчивающимся в верхней части шаровой поверхностью с возможностью сцепления и вертикального перемещения подвижным захватом устройства центрирования и подтягивания при дистанционной отдаче закрепления за комингс-площадку подводного объекта.
| RU 96110820 A, 10.08.1998 | |||
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ И ТРАНСПОРТИРОВАНИЯ ВЯЗКОУПРУГОПЛАСТИЧНЫХ И ВЯЗКОПЛАСТИЧНЫХ ПИЩЕВЫХ МАСС | 2004 |
|
RU2264713C1 |
| УСТРОЙСТВО ДЛЯ СТЫКОВКИ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА С ПОДВОДНЫМ ОБЪЕКТОМ И СПОСОБ СТЫКОВКИ С ЕГО ИСПОЛЬЗОВАНИЕМ | 2004 |
|
RU2250858C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО АППАРАТА | 1996 |
|
RU2157776C2 |
| DE 19718163 A1, 05.11.1998 | |||
| Измерительный преобразователь с емкостным датчиком | 1990 |
|
SU1767451A1 |

