Изобретение относится к области судостроения, более конкретно к подводным аппаратам, предназначенным для приема людей с подводных объектов, находящихся под водой, в том числе с аварийных.
Известен транспортно-спасательный (спасательный) подводный аппарат, включающий камеру присоса со стыковочным фланцем. За счет прижима стыковочного фланца к плоскости комингс-площадки подводного объекта и создания в полости камеры присоса давления ниже забортного создается сила гидростатического присоса, удерживающая подводный аппарат на комингс-площадке.
Однако в ряде случаев после осуществления присоса могут появляться дополнительные силы, стремящиеся сместить аппарат с комингс-площадки. Например, может измениться скорость и направление подводного течения, могут возрасти волновые силы, а в отсеке подводного объекта под комингс-площадкой может быть повышенное давление воздуха. Опасность действия указанных факторов существенно возрастает с уменьшением глубины нахождения подводного объекта.
Поэтому для повышения надежности удержания подводного аппарата на комингс-площадке используются специальные устройства для крепления его к конструкциям комингс-площадки, которые устанавливаются внутри камеры присоса. В соглашении по стандартизации «NATO STANAG 1297. Requirement for a NATO Common Rescue Seat» например, рекомендуется использовать талрепы (turnbuckles).
В практике ВМФ России рекомендуется применять струбцины, как правило, С-образные, обеспечивающие более высокую сопротивляемость смещающим силам (Установка крепления СПС по походному. Черт.940-251-003 ОАО «ЦКБ «Лазурит», Нижний Новгород). Струбцины должны устанавливаться, используя соответствующие вырезы в конструкциях комингс-площадки.
В соответствии с ГОСТ РВ 52360-2005 «Комингс-площадка. Общие технические требования», например, таких вырезов, разнесенных на равные расстояния по окружности кольца комингс-площадки, должно быть три. Указанные устройства устанавливаются, как правило, вручную сразу после осуществления присоса, то есть в условиях, когда дополнительные смещающие силы отсутствуют, а отсоединять их приходится в условиях действия указанных сил, что приводит к риску гибели человека, осуществляющего эту операцию, или к возникновению аварийной ситуации с аппаратом.
Известны спасательные подводные аппараты, в камере присоса которых установлен манипулятор (Кулигин А.Н., Белянкин Е.Г., Головко И.Е. Устройства для обеспечения спасения силами СПАСР, 02.04.2007, salvatio-of-the-forces-spasr.html), которым можно выполнить операции по отсоединению креплений при отсутствии человека в камере присоса.
Однако для исключения возникновения аварийной ситуации с аппаратом в целом, отсоединение всех креплений аппарата к конструкциям комингс-площадки должно происходить одновременно, что обеспечить с помощью одного манипулятора невозможно. Размещение нескольких манипуляторов в камере присоса практически невозможно в связи с весьма ограниченными объемами.
Целью изобретения является повышение безопасности отсоединения устройств крепления камеры присоса аппарата от конструкций комингс-площадки подводного объекта и, тем самым, расширение области эффективного использования транспортно-спасательного подводного аппарата на небольшие глубины.
В качестве прототипа устройства крепления принимается струбцина, как наиболее эффективное из известных средств, применяемых для крепления аппаратов, имеющих камеру присоса. Описания струбцин имеются в различных источниках, например, (Струбцина в сборе. 940-2510-051 (ОАО «ЦКБ «Лазурит», г. Нижний Новгород), (Струбцины и зажимы. ; Струбцина столярная. ТУ 143-64), а также в описании патента РФ №2065808 C1, В25 В5/00 от 25.12.1990 г., публ. 27.08.1996 г.).
В общем виде струбцина для прижатия друг к другу двух элементов состоит из кронштейна, один конец которого взаимодействует с одним из скрепляемых элементов, а другой конец взаимодействует с гайкой, через которую проходит прижимной шток с резьбой, который взаимодействует со вторым из скрепляемых элементов. Чаше всего один из концов прижимного штока оснащается поперечиной, создающей Т-образную конструкцию. При этом поперечина может перемещаться вдоль своей оси через отверстие в штоке.
Поставленная цель достигается за счет того, что у каждого устройства крепления часть кронштейна выполняется поворотной в плоскости кронштейна и удерживается в рабочем состоянии затвором, изменение положения которого обеспечивается с помощью тяги, соединенной с находящейся в районе оси камеры присоса центральной пластиной, оснащенной элементом (штырем, скобой) для соединения с захватом устройства, обеспечивающего перемещение захвата в пространстве, например, манипулятором.
В частности, у С-образной струбцины поворотной может быть выполнена верхняя часть кронштейна, взаимодействующая с гайкой с прижимным штоком, в районе оси поворота в кромке кронштейна выполнен вырез, в который входит выступ поворотного затвора, в верхней части которого закреплен стакан, в который вставляется один конец тяги, а к нижней неподвижной части кронштейна присоединен упругий элемент, напрягаемый при установке поворотной части кронштейна в рабочее положение.
При этом стакан затвора расположен так, чтобы при выводе выступа затвора из выреза кронштейна при повороте затвора ось стакана приняла положение, близкое к перпендикулярному плоскости стыковочного фланца, а тяга соединена с конструкцией камеры присоса гибкой связью.
Для обеспечения регулировки контакта прижимного штока с поверхностью стыковочного фланца камеры присоса гайка может крепиться к выдвижному элементу, входящему в направляющую конструкцию верхней части кронштейна, которая может быть оснащена креплением, фиксирующим положение выдвижного элемента.
Поскольку величина силы прижима С-образной струбцины ограничивается размерами кронштейна, которые определяются размерами стандартного выреза в конструкции комингс-площадки, а также допустимым усилием, развиваемым манипулятором, для увеличения силы прижима при сохранении ограничения усилия манипулятора неподвижная часть кронштейна может быть выполнена в виде корпуса, закрепляемого на стыковочном фланце камеры присоса.
Поворотная часть кронштейна выполнена с двумя щеками, между которыми проходит прижимной шток, нижняя часть которого закреплена за конструкцию комингс-площадки, а верхняя посредством гайки взаимодействует со щеками поворотной части кронштейна, которая удерживается поворотным затвором, удерживаемым поворотным фиксатором затвора, который соединен с тягой. При этом фиксатор затвора может быть выполнен в виде профилированного кулачка, а нижняя часть прижимного штока, входящая в стандартный вырез в конструкции комингс-площадки, может оснащаться поперечиной, создающей вид перевернутой буквы Т.
Для дальнейшего увеличения разницы между усилием прижима и усилием манипулятора поворотный фиксатор затвора может быть выполнен в виде двух вилок, между которыми и корпусом размещается фиксирующий цилиндр, а в теле затвора или стенке корпуса выполнен вырез, в который может войти фиксирующий цилиндр, перемещающийся при повороте фиксатора затвора.
Для крепления корпуса к стыковочному фланцу на верхней внутренней поверхности фланца могут быть с шагом 5…10 градусов выполнены соответствующие крепежные отверстия с резьбой, закрываемые пробками. При этом щеки поворотной части кронштейна выполняются с возможностью поворота относительно оси, лежащей в плоскости кронштейна, на угол не менее шага крепежных отверстий.
Для упрощения закрепления корпуса на поверхности стыковочного фланца, корпус может крепиться к опорной дуге углового профиля. При этом длина дуги должна быть такой, чтобы ось прижимного штока находилась в границах сегмента, образованного дугой.
Для облегчения монтажа устройства внутри камеры присоса опорная дуга может быть выполнена из нескольких частей, скрепляемых между собой, а тяги могут быть выполнены составными.
Для повышения надежности крепления корпусов устройств к стыковочному фланцу опорные дуги всех устройств могут быть объединены в единое опорное кольцо.
Устройство для перемещения захвата (манипулятор), расположенное в камере присоса аппарата, должно иметь число степеней свободы не менее двух. В качестве манипулятора может быть применено устройство центрирования и подтягивания или устройство закрепления и подтягивания, состоящее из трех тяг изменяемой длины, две из которых - силовые, расположены вдоль оси камеры присоса и верхними концами шарнирно закреплены на конструкциях корпуса аппарата или камеры присоса таким образом, чтобы шарниры были разнесены от оси камеры присоса, а линия, проходящая через центры шарниров, была параллельна основной плоскости аппарата, нижними концами шарнирно соединены в одной точке и соединены с подвижным захватом, а третья тяга - управляющая, расположена максимально перпендикулярно к плоскости, образованной силовыми тягами, и одним концом закреплена на конструкциях корпуса аппарата или камеры присоса, другим концом шарнирно закреплена на одной из силовых тяг, при этом тяги изменяемой длины могут быть выполнены в виде гидроцилиндров.
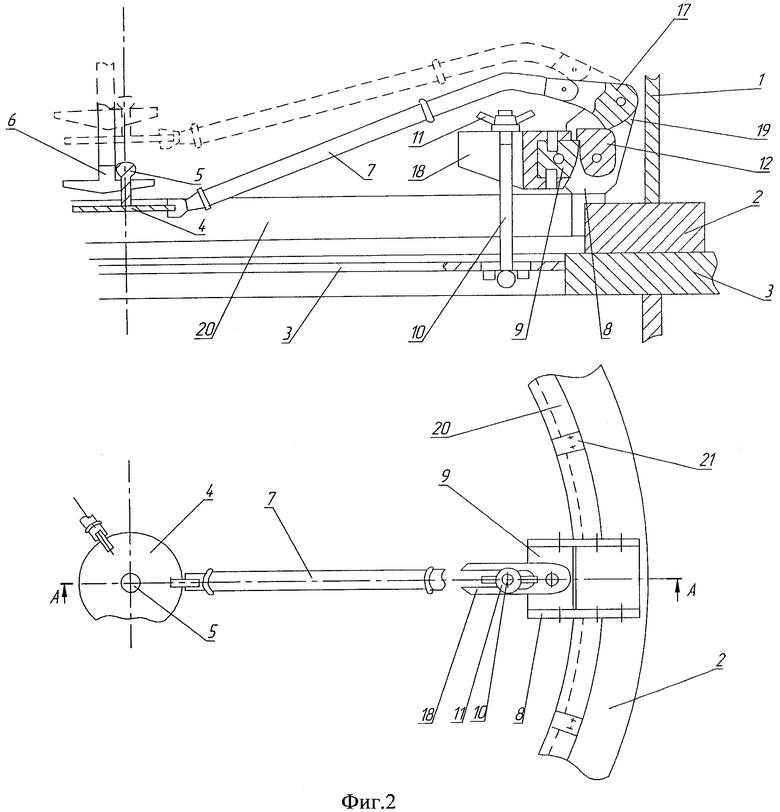
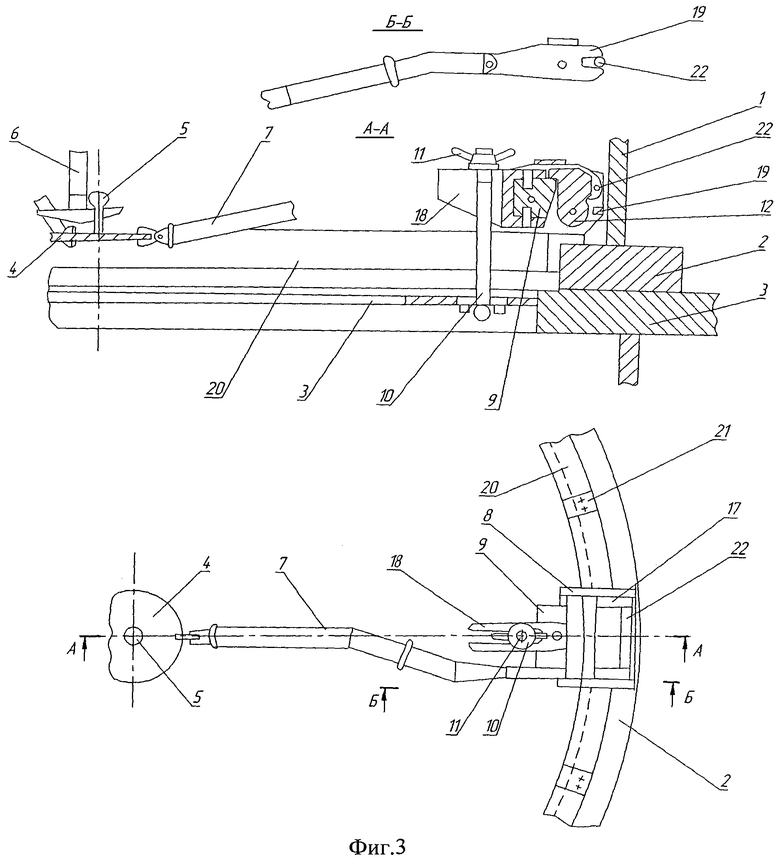
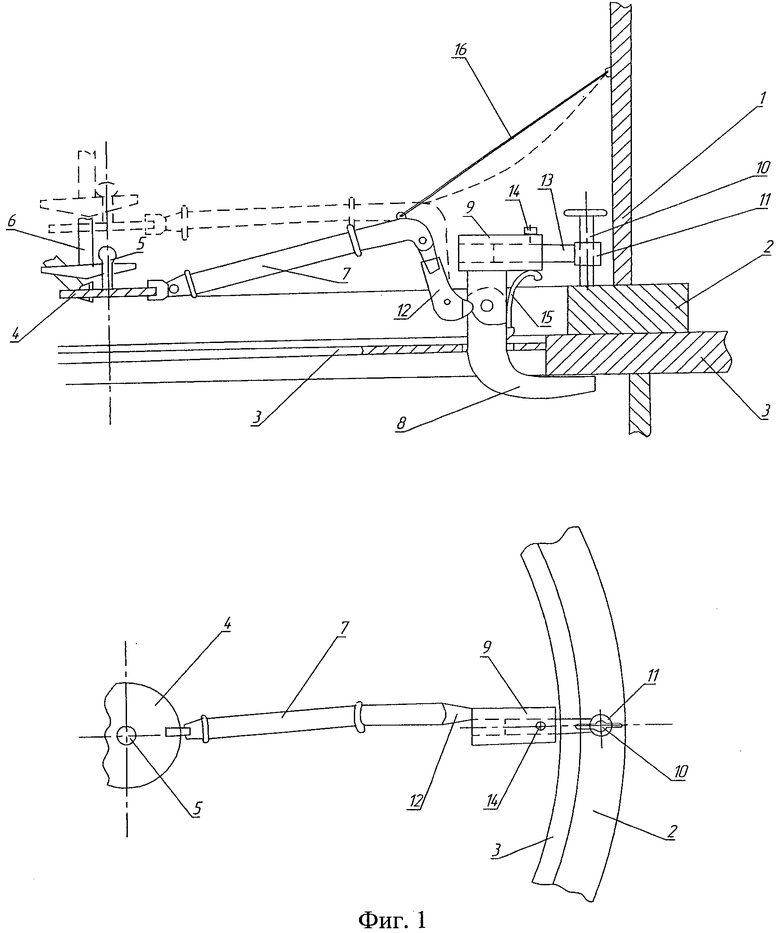
Сущность изобретения поясняется фиг.1, на которой представлено расположенное в камере присоса аппарата устройство крепления в виде С-образной струбцины, фиг.2, на которой представлено устройство крепления с фиксатором затвора в виде кулачка, и фиг.3, на которой представлено аналогичное устройство с фиксатором затвора в виде вилок и фиксирующего цилиндра.
Применительно к фиг.1: камера присоса 1 стыковочным фланцем 2 опирается на конструкцию комингс-площадки 3. В средней части камеры присоса расположена центральная пластина 4 со штырем 5, взаимодействующим с захватом манипулятора 6. К центральной пластине присоединены тяги 7, которые другим концом взаимодействуют с устройством крепления.
Нижняя неподвижная часть 8 кронштейна устройства шарнирно соединена с верхней поворотной частью 9 кронштейна, которая взаимодействует с прижимным штоком 10 через гайку 11 и с поворотным затвором 12, в стакан которого, расположенный в верхней части затвора, входит конец тяги 7.
Гайка 11 прикреплена к выдвижному элементу 13, положение которого фиксируется креплением 14. К нижней части 8 присоединен упругий элемент 15. Тяга 7 соединена с конструкцией камеры присоса 1 посредством гибкой связи 16. При креплении камеры присоса к комингс-площадке устройства устанавливаются вручную.
После установки нижней части 8 кронштейна через вырез в конструкции комингс-площадки верхняя часть 9 поворачивается в рабочее положение, напрягая упругий элемент 15, и фиксируется в рабочем положении посредством введения выступа поворотного затвора 12 в вырез поворотной части кронштейна. При этом упругий элемент 15 создает усилие, зажимающее выступ поворотного затвора 12 и фиксирующего устройство в рабочем положении.
Гайка 11 с прижимным штоком 10 устанавливается в требуемое положение по ширине стыковочного фланца 2 путем перемещения выдвижного элемента 13. После фиксации положения выдвижного элемента креплением 14 прижимной шток 10 ввинчивается в гайку 11, создавая усилие, прижимающее стыковочный фланец 2 к комингс-площадке 3.
Указанные операции выполняются для каждого устройства, размещаемого в камере присоса аппарата. Перед отдачей устройств крепления в камеру присоса из аппарата перемещаются центральная пластина 4 и составные части тяг 7. Каждая из тяг 7 собирается из составных частей и одним концом присоединяется к центральной пластине 4, а другим концом вставляется в стакан верхней части поворотного затвора 12.
Кроме того, каждая тяга 7 соединяется к конструкции камеры присоса 1 посредством гибкой связи 16. После этого человек покидает камеру присоса. Захват манипулятора 6, управляемого из аппарата, заводится за штырь 5 центральной пластины 4. Камера присоса заполняется водой, давление в ней сравнивается с забортным.
После этого захват манипулятора 6 с центральной пластиной 4 перемещается вверх, одновременно поворачивая с помощью тяг 7 поворотные затворы 12. После выхода выступа затвора 12 из выреза поворотной части кронштейна 9 упругий элемент 15 поворачивает часть 9 кронштейна в нерабочее положение, освобождая стыковочный фланец от крепления. При этом силы трения между стаканом поворотного затвора 12 и концом тяги 7 уменьшаются практически до нуля и при дальнейшем подъеме центральной пластины тяга 7 выходит из стакана поворотного затвора 12, ось которого после поворота затвора приняла положение, близкое к перпендикулярному плоскости стыковочного фланца. Тяги 7 после этого удерживаются пластиной 4 и гибкой связью 16. Аппарат может всплывать с комингс-площадки подводного объекта.
При совершении нескольких рейсов аппарата на данную комингс-площадку части устройства, оставшиеся на ней, вновь используются после осуществления присоса. После последнего рейса эти части устройства могут быть демонтированы при необходимости с помощью рабочих манипуляторов, установленных в носовой части этого же аппарата, или с помощью специального рабочего подводного аппарата.
Применительно к фиг.2: камера присоса 1 стыковочным фланцем 2 опирается на конструкцию комингс-площадки 3. В средней части камеры присоса расположена центральная пластина 4 со штырем 5, взаимодействующим с захватом манипулятора 6. К центральной пластине присоединены тяги 7, которые другим концом взаимодействуют с устройством крепления.
Неподвижная часть кронштейна устройства в виде корпуса 8 шарнирно соединена с поворотной частью 9 кронштейна, которая взаимодействует с прижимным штоком 10 через гайку 11 и с поворотным затвором 12, который фиксируется поворотным фиксатором затвора 17, соединенным с концом тяги 7. Шток 10 проходит через щеки 18, а его нижняя часть закреплена в вырезе конструкции комингс-площадки 3.
Кулачек фиксатора затвора 17 в рабочем положении касается упора 19. Корпус устройства 8 закреплен на опорной дуге 20, части которой соединены между собой креплениями 21. При креплении камеры присоса к комингс-площадке устройства устанавливаются вручную. На поверхность стыковочного фланца 2 устанавливаются составные части опорной дуги 20 и соединяются между собой креплениями 21.
Вместе со средней частью опорной дуги 20 устанавливается неподвижный корпус 8 с размещенными в нем поворотными элементами 9, 12 и 17. Устройство приводится в рабочее состояние, при котором поворотная часть 9 удерживается выступом затвора 12, а фиксатор затвора 17 установлен в крайнее положение до соприкосновения с упором 19.
После этого шток 10 устанавливается в вырез конструкции комингс-площадки 3 и помещается между щек 18. Затем с помощью гайки 11 создается усилие, прижимающее корпус 8 с опорной дугой к стыковочному фланцу 2 камеры присоса 1 и, соответственно, прижимающее стыковочный фланец 2 к конструкции комингс-площадки 3.
Указанные операции выполняются для каждого устройства, размещаемого в камере присоса аппарата. Перед отдачей устройств крепления в камеру присоса из аппарата перемещаются центральная пластина 4 и составные части тяг 7. Каждая из тяг 7 собирается из составных частей и одним концом присоединяется к центральной пластине 4, а другим концом - к поворотному фиксатору 17.
После этого человек покидает камеру присоса. Захват манипулятора 6, управляемого из аппарата, заводится за штырь 5 центральной пластины 4. Камера присоса заполняется водой, давление в ней сравнивается с забортным. После этого захват манипулятора 6 с центральной пластиной 4 перемещается вверх, одновременно поворачивая с помощью тяг 7 поворотные фиксаторы 17, освобождая поворотные затворы 12.
После выхода выступа затвора 12 за габариты поворотной части кронштейна 9 эта часть под действием силы тяжести поворачивается вниз, освобождая прижимной шток 10 вместе с гайкой 11, которые под действием силы тяжести перемещаются вниз, к конструкциям комингс-площадки. Аппарат может всплывать с комингс-площадки подводного объекта.
При совершении нескольких рейсов аппарата на данную комингс-площадку прижимные штоки 10 с гайками 11, оставшиеся на ней, вновь используются после осуществления присоса. После последнего рейса эти части устройства могут быть демонтированы при необходимости с помощью рабочих манипуляторов, установленных в носовой части этого же аппарата, или с помощью специального рабочего подводного аппарата.
На фиг.3, в отличие от фиг.2, поворотный затвор 12 удерживается в рабочем положении посредством фиксирующего цилиндра 22, который прижимается телом затвора 12 к стенке корпуса 8 и удерживается в требуемом положении поворотным фиксатором 17, выполненным в виде двух вилок. В теле затвора 12 ниже точки взаимодействия с фиксирующим цилиндром в рабочем положении выполнен вырез. При отдаче крепления фиксатор 17, поворачиваемый с помощью тяги 7, перемещает фиксирующий цилиндр в область выреза в теле затвора 12, позволяя затвору повернуться и освободить поворотную часть кронштейна 9. После поворота затвора 12 фиксирующий цилиндр 22 удерживается упором 19. Остальные элементы и операции соответствуют фиг.2.
Расчеты показывают, что возможна одновременная отдача устройств крепления камеры присоса к комингс-площадке при усилии манипулятора, составляющего 10…25% от суммарного усилия прижима, создаваемого всеми устройствами, установленными в камере присоса аппарата. При этом обеспечивается безопасное для транспортно-спасательного аппарата и для его экипажа отсоединение от комингс-площадки подводного объекта, повышающее эффективность использования аппарата в сложных условиях воздействия окружающей среды, в том числе на небольших глубинах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ СПАСЕНИЯ ЭКИПАЖА ПОДВОДНЫХ ЛОДОК, В ТОМ ЧИСЛЕ И ПОДО ЛЬДОМ | 2012 |
|
RU2509027C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ПОДВОДНОГО АППАРАТА ЗА КОМИНГС-ПЛОЩАДКУ ПОДВОДНОГО ОБЪЕКТА | 2011 |
|
RU2509028C2 |
| ПОДВОДНЫЙ АППАРАТ С ПОВОРОТНОЙ КАМЕРОЙ СТЫКОВКИ И ПРИСОСА И УСТРОЙСТВОМ ЦЕНТРИРОВАНИЯ И ПОДТЯГИВАНИЯ | 2011 |
|
RU2468961C1 |
| СЪЕМНО-ЗАКРЕПЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ, ПОДВОДНОГО ВЫПУСКА И ПРИЕМА СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА ПОДВОДНОЙ ЛОДКОЙ | 2014 |
|
RU2589500C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ПРОВЕРОК СПАСАТЕЛЬНОГО ЛЮКА С КОМИНГС-ПЛОЩАДКОЙ ПОДВОДНОЙ ЛОДКИ (МАКЕТ) | 2014 |
|
RU2550570C1 |
| Спасательный подводный аппарат | 2018 |
|
RU2736510C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ КОМИНГС-ПЛОЩАДОК И СПАСАТЕЛЬНЫХ ЛЮКОВ ПОДВОДНЫХ ЛОДОК | 2002 |
|
RU2334645C2 |
| АВИАДЕСАНТИРУЕМЫЙ СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2022 |
|
RU2782037C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2016 |
|
RU2615029C1 |
| СЪЕМНО-ЗАКРЕПЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ, ПОДВОДНОГО ВЫПУСКА И ПРИЕМА СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА ПОДВОДНОЙ ЛОДКОЙ | 2020 |
|
RU2736964C1 |
Изобретение относится к области судостроения. Спасательно-транспортный подводный аппарат содержит камеру присоса с размещенными в ней устройством, включающим захват и обеспечивающим перемещение захвата в пространстве, например, манипулятором и устройствами крепления камеры присоса к конструкциям комингс-площадки подводного объекта. Каждое из устройств крепления включает кронштейн, один конец которого взаимодействует с одним из скрепляемых элементов, а другой конец взаимодействует с гайкой, через которую проходит прижимной шток с резьбой, который взаимодействует со вторым из скрепляемых элементов. Часть кронштейна выполняется поворотной в плоскости кронштейна и удерживается в рабочем состоянии затвором, изменение положения которого обеспечивается с помощью тяги, соединенной с находящейся в районе оси камеры присоса центральной пластиной, оснащенной элементом для соединения с захватом. Повышается эффективность использования аппарата в сложных условиях воздействия окружающей среды, в том числе на небольших глубинах, а также повышается безопасность отсоединения от комингс-площадки. 15 з. п. ф-лы, 3 ил.
1. Спасательно-транспортный подводный аппарат, содержащий камеру присоса с размещенными в ней устройством, включающим захват и обеспечивающим перемещение захвата в пространстве, например, манипулятором, и устройствами крепления камеры присоса к конструкциям комингс-площадки подводного объекта, каждое из которых включает кронштейн, один конец которого взаимодействует с одним из скрепляемых элементов, а другой конец взаимодействует с гайкой, через которую проходит прижимной шток с резьбой, который взаимодействует со вторым из скрепляемых элементов, отличающийся тем, что у каждого устройства крепления часть кронштейна выполняется поворотной в плоскости кронштейна и удерживается в рабочем состоянии затвором, изменение положения которого обеспечивается с помощью тяги, соединенной с находящейся в районе оси камеры присоса центральной пластиной, оснащенной элементом для соединения с захватом.
2. Спасательно-транспортный подводный аппарат по п.1, отличающийся тем, что кронштейн выполнен С-образной формы, поворотной выполнена верхняя часть кронштейна (верхняя поворотная часть кронштейна), взаимодействующая с гайкой с прижимным штоком, в районе оси поворота в кромке кронштейна выполнен вырез, в который входит выступ поворотного затвора, в верхней части которого закреплен стакан, в который вставляется один конец тяги, а к нижней неподвижной части кронштейна присоединен упругий элемент, который напрягается при установке поворотной части кронштейна в рабочее положение, стакан затвора расположен так, чтобы при выводе выступа затвора из выреза кронштейна при повороте затвора ось стакана приняла положение, близкое к перпендикулярному относительно плоскости стыковочного фланца, а тяга соединена с конструкцией камеры присоса гибкой связью.
3. Спасательно-транспортный подводный аппарат по п.1, отличающийся тем, что неподвижная часть кронштейна выполнена в виде корпуса, закрепляемого на стыковочном фланце камеры присоса, поворотная часть кронштейна выполнена с двумя щеками, между которыми проходит прижимной шток, нижняя часть которого закреплена за конструкцию комингс-площадки, верхняя посредством гайки взаимодействует со щеками поворотной части кронштейна, которая удерживается поворотным затвором, удерживаемым поворотным фиксатором затвора, который соединен с тягой.
4. Спасательно-транспортный подводный аппарат по п.1, отличающийся тем, что тяги выполнены составными.
5. Спасательно-транспортный подводный аппарат по п.1, отличающийся тем, что устройство, включающее захват и обеспечивающее перемещение захвата в пространстве, имеет степени свободы не менее двух.
6. Спасательно-транспортный подводный аппарат по п.2, отличающийся тем, что гайка прикреплена к выдвижному элементу, входящему в направляющую конструкцию верхней части кронштейна.
7. Спасательно-транспортный подводный аппарат по п.3, отличающийся тем, что поворотный фиксатор затвора выполнен в виде профилированного кулачка.
8. Спасательно-транспортный подводный аппарат по п.3, отличающийся тем, что поворотный фиксатор затвора выполнен в виде двух вилок, между которыми и корпусом размещается фиксирующий цилиндр, а в теле затвора или стенке корпуса выполнен вырез, в который может войти фиксирующий цилиндр.
9. Спасательно-транспортный подводный аппарат по п.3, отличающийся тем, что нижняя часть прижимного штока оснащена поперечиной, создающей вид перевернутой буквы Т.
10. Спасательно-транспортный подводный аппарат по п.3, отличающийся тем, что на верхней внутренней поверхности стыковочного фланца с определенным шагом по окружности фланца выполнены крепежные отверстия с резьбой, закрываемые пробками.
11. Спасательно-транспортный подводный аппарат по п.3, отличающийся тем, что щеки поворотной части кронштейна выполняются с возможностью поворота относительно оси, лежащей в плоскости кронштейна.
12. Спасательно-транспортный подводный аппарат по п.3, отличающийся тем, что корпус прикреплен к устанавливаемой на стыковочный фланец опорной дуге углового профиля с длиной дуги, образующей сегмент, в границах которого находится ось прижимного штока.
13. Спасательно-транспортный подводный аппарат по п.5, отличающийся тем, что устройство, включающее захват и обеспечивающее перемещение захвата в пространстве, выполнено в виде трехстепенного манипулятора, состоящего из трех тяг изменяемой длины, две из которых силовые, расположены вдоль оси камеры присоса и верхними концами шарнирно закреплены на конструкциях корпуса аппарата или камеры присоса таким образом, чтобы шарниры были разнесены от оси камеры присоса, а линия, проходящая через центры шарниров, была параллельна основной плоскости аппарата, нижними концами шарнирно соединены в одной точке и соединены с подвижным захватом, а третья тяга, управляющая, расположена максимально перпендикулярно к плоскости, образованной силовыми тягами, и одним концом закреплена на конструкциях корпуса аппарата или камеры присоса, другим концом шарнирно закреплена на одной из силовых тяг.
14. Спасательно-транспортный подводный аппарат по п.6, отличающийся тем, что направляющая конструкция верхней части кронштейна оснащена креплением, фиксирующим положение выдвижного элемента.
15. Спасательно-транспортный подводный аппарат по п.12, отличающийся тем, что опорная дуга выполнена из нескольких частей, скрепляемых между собой.
16. Спасательно-транспортный подводный аппарат по п.12, отличающийся тем, что опорные дуги всех устройств объединены в единое опорное кольцо.
| СТРУБЦИНА ДЛЯ ЗАПРЕССОВКИ И ДЕМОНТАЖА КЛИНЬЕВ | 1990 |
|
RU2065808C1 |
| СПОСОБ СПАСЕНИЯ С АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ | 2002 |
|
RU2214344C1 |
| Керноотборный снаряд | 1987 |
|
SU1490251A1 |
| US 3044812 A, 17.07.1962 | |||

