Устройство обнаружения движущихся наземных транспортных средств по акустическим сигналам относится к области технических средств охраны и может быть использовано для помехоустойчивого обнаружения наземных транспортных средств по их акустическим сигналам при охране территорий и подступов к различным объектам.
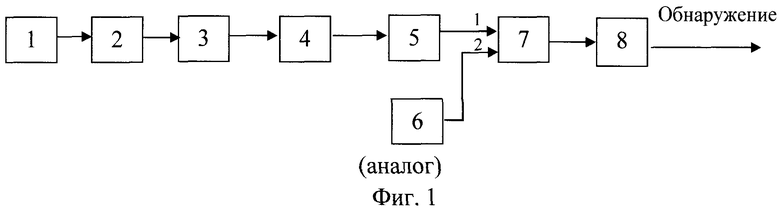
Известно "Устройство обнаружения движущейся наземной техники по акустическим сигналам, основанное на вейвлет-анализе" [1], содержащее (фиг.1): 1 - микрофон (М), 2 - предварительный усилитель (ПУ), 3 - аналого-цифровой преобразователь (АЦП), 4 - формирователь временного окна (ФВО), 5 - блок вейвлет-анализа (БВА), 6 - базу данных (БД), 7 - блок сравнения (БС), 8 - блок принятия решения (БПР).
В рассмотренном устройстве обнаружение движущейся наземной техники основано на вейвлет-анализе. В устройстве для преобразования входного сигнала используется спалайн-вейвлет 6-го порядка, полученные коэффициенты которого сравниваются с заранее полученными, хранящимися в базе данных, и, исходя из меры их сходства и отличия, в блоке принятия решения принимается решение об обнаружении.
Недостаток заключается в сложной реализации такого устройства, в отсутствии специализированных микросхем для вейвлет-анализа в отличии от преобразования Фурье, в сложном методе принятия решения.
Из известных наиболее близким по технической сущности является "Устройство для обнаружения движущихся наземных транспортных средств, основанное на акустических сигналах" [2], содержащее (фиг.2): 1 - микрофон (М), 2 - предварительный усилитель (ПУ), 3 - аналого-цифровой преобразователь (АЦП), 4 - формирователь временного окна (ФВО), 5 - блок спектрального представления сигнала (БСПС), 6 - блок спектрально-временного представления сигнала (БСВПС), 7 - блок обнаружения и классификации (БОК).
В формирователе временного окна из входного акустического сигнала с микрофона после предварительного усиления и аналого-цифрового преобразования с частотой дискретизации 22050 Гц выделяются временные окна длительностью 400 мс.
В блоке спектрального представления сигнала по входному сигналу вычисляется амплитудно-частотный спектр с помощью 40 полосовых фильтров, охватывающих частотный диапазон от 20 Гц до 11025 кГц.
В блоке спектрально-временного представления сигнала происходит вычисление признаков. За время порядка 200 мс или более выполняется интеграция множества входных спектральных векторов. При этом ответ системы в текущий момент времени зависит не только от текущего входного вектора-признака, но основывается и на предыдущих. Полученное спектрально-временное представление подается на вход блока обнаружения и классификации, состоящего из двухслойной нейронной сети.
Обучение нейронной сети происходит по правилам Хебба. Количество входов нейронной сети определяется числом признаков (количеством полосовых фильтров), а число входов в выходном слое задается числом временных окон и количеством извлеченных выходных признаков (среднее значение и среднеквадратическое отклонение). Решение об обнаружении и классификации движущегося наземного транспортного средства принимается в выходном слое нейронной сети при превышении порогов.
Недостаток заключается в том, что эффективность и помехоустойчивость работы устройства зависит от количества выбранных для поучения признаков полосовых фильтров. Максимальное их значение - 40 приведет к увеличению аппаратных ресурсов на работу устройства, а меньшее их число снизит эффективность обнаружения и классификации. Работа блока обнаружения и классификации основана на обучении нейронной и ее постоянной адаптации к окружающей среде, а это также приводит к усложнению работы устройства.
Предлагаемое изобретение направлено на повышение эффективности обнаружения движущейся техники при снижении аппаратных ресурсов за счет более простого алгоритма обработки входного сигнала, получения признаков и принятия решения об обнаружении с использованием адаптивных порогов.
Это достигается тем, что в устройство обнаружения и классификации движущихся наземных транспортных средств, основанное на акустических сигналах, содержащее предварительный усилитель, подключенный к выходу микрофона, аналого-цифровой преобразователь, формирователь временного окна, блок спектрального представления сигнала, согласно предлагаемому изобретению дополнительно введены фильтр верхних частот, блок оценки изменения уровня сигнала внутри временного окна, блок нахождения максимумов, блок частотной коррекции, блок вычисления второго порога, первое пороговое устройство, второе пороговое устройство и схема «И», причем вход фильтра верхних частот подключен к выходу формирователя временного окна, а первый выход - ко входу блока спектрального представления сигнала, выход которого соединен со входом блока нахождения максимумов, выход которого подключен ко входу блока частотной коррекции, с первого выхода которого первый признак (среднее значение) поступает на первое и второе пороговые устройства, а со второго выхода второй признак (среднеквадратическое отклонение) - на первый вход блока вычисления второго порога, второй вход которого соединен с выходом блока оценки изменения уровня сигнала внутри временного окна, вход которого подключен ко второму выходу фильтра верхних частот, выходы первого и второго пороговых устройств соединены со входами схемы «И».
Введение фильтра верхних частот с частотой среза 50 Гц позволяет в представленном устройстве уменьшить влияние естественных акустических помех.
Введение блоков нахождения максимумов и частотной коррекции позволяет сократить размерность признакового пространства без снижения эффективности работы устройства за счет использования только информативных частот в спектре звукового сигнала движущейся техники, а также уменьшить вычислительные ресурсы при анализе сигналов в реальном времени. В блоке нахождения максимумов из спектра амплитуд выбираются 100 гармонических составляющих с максимальным значением амплитуды, а в блоке частотной коррекции по ним вычисляются два признака - среднее значение амплитуды в спектре и ее среднеквадратическое отклонение.
Введение первого порогового устройства позволяет обнаруживать акустическое возмущение по среднему значению и адаптивному порогу.
Введение второго порогового устройства позволяет обнаруживать полезный сигнал на фоне помех, используя среднее значение и скорректированное среднеквадратическое отклонение в качестве порога.
Введение блока оценки изменения уровня сигнала внутри временного окна позволяет вычислить корректирующий множитель для среднеквадратического отклонения. Для этого временное окно разбивается на 10 интервалов. В каждом вычисляется среднее значение по модулю, по которым далее вычисляется среднеквадратическое отклонение. Далее это значение делится на минимальное среднее значение.
Введение блока вычисления второго порога позволяет вычислить второе пороговое значение. При этом значение корректирующего множителя умножается на значение среднеквадратического отклонения, вычисленного в блоке частотной коррекции.
Введение схемы «И» позволяет окончательно принять решение об обнаружении движущейся наземной техники. Если произойдет превышение сразу двух порогов, то устройство примет решение об обнаружении движущейся наземной техники.
На фиг.3 представлена блок-схема предлагаемого устройства для обнаружения движущихся наземных транспортных средств по акустическим сигналам.
На фиг.4 графически изображена матрица из гармоник спектра с максимальными амплитудами Sf (F=100) проезда автомобиля (а) и 3-х сигналов гудка автомобиля (б).
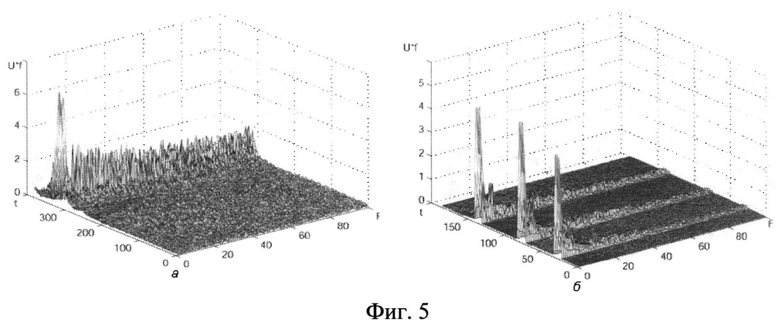
На фиг.5 графически изображены «взвешенные» максимумы спектров Сf (F=100) проезда автомобиля (а) и 3-х сигналов гудка автомобиля (б).
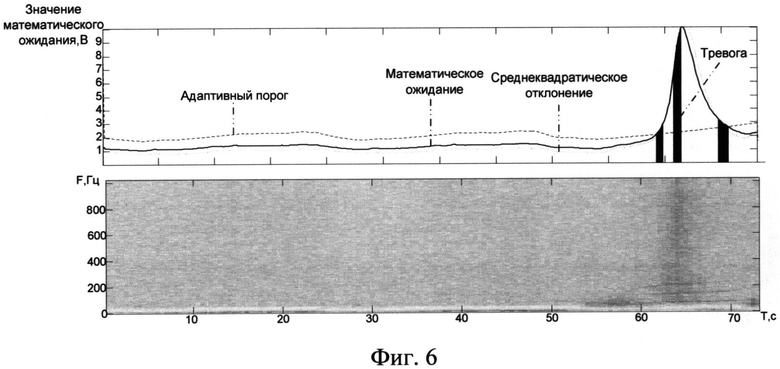
На фиг.6 приведена спектрограмма проезда техники и график изменения признаков и порогов во времени, показывающая пример работы устройства.
Устройство (фиг.3) содержит:
1 - микрофон;
2 - предварительный усилитель;
3 - аналого-цифровой преобразователь;
4 - формирователь временного окна;
5 - фильтр верхних частот;
6 - блок оценки изменения уровня сигнала внутри временного окна;
7 - блок спектрального представления сигнала;
8 - блок нахождения максимумов;
9 - блок частотной коррекции;
10 - блок вычисления второго порога;
11 - первое пороговое устройство;
12 - второе пороговое устройство;
13 - схема «И».
При этом микрофон 1 соединен с предварительным усилителем 2, выход которого подключен ко входу аналого-цифрового преобразователя 3, выход которого - ко входу формирователя временного окна 4, выход которого соединен с фильтром верхних частот 5, первый выход которого подключен ко входу блока спектрального представления сигнала 7, выход которого соединен со входом блока нахождения максимумов 8, выход которого подключен ко входу блока частотной коррекции 9, первый выход которого подключен ко входу первого порогового устройства 11 и к первому входу второго порогового устройства 12, второй выход блока частотной коррекции 9 соединен с первым входом блока вычисления второго порога 10, второй вход которого соединен с выходом блока оценки изменения уровня сигнала внутри временного окна 6, вход которого соединен со вторым выходом фильтра верхних частот 5, выход блока вычисления второго порога 10 подключен ко второму входу второго порогового устройства 12, выходы пороговых устройств 11 и 12 подключены ко входам схемы «И» 13.
Работает устройство обнаружения движущихся наземных транспортных средств по акустическим сигналам следующим образом.
Сигнал с выхода микрофона 1, поступает на предварительный усилитель 2, а далее - на аналого-цифровой преобразователь 3. В формирователе временного окна 4 выделяются скользящие временные окна длительностью 1 с со сдвигом 125 мс, которые последовательно поступают на фильтр верхних частот 5 с частотой среза 50 Гц.
Для получения частотной информации о сигнале в блоке спектрального представления сигнала 7 используется классическое преобразование Фурье. Наиболее просто на микроконтроллере реализуется быстрое преобразование Фурье (1):
где х={х1, х2,…, xN} - вектор входных отсчетов сигнала, N=2048.
Далее в блоках нахождения максимумов 8 и частотной коррекции 9 вычисляются признаки, по которым принимается решение об обнаружении наземной техники.
Спектр звукового сигнала движущейся техники имеет широкополосный характер. В зависимости от многих параметров максимум его может лежать в различных частотных областях. Выделение информативных признаков из спектра сигнала представляет собой поиск заданного числа (F) максимальных амплитуд в спектре и анализ их частотного размещения. Для этого производятся следующие вычисления.
В блоке нахождения максимумов находятся максимумы в спектре 
при 

Находится заданное число (F=100) наибольших максимумов в спектре. Для этого вектор Мk сортируется по убыванию амплитуд, и из него выделяются первые F значений гармоник. Формируется вектор Sf, где f=1, 2,…,F.
На фиг.4 приведены визуализации матрицы максимальных амплитуд значений спектра проезда техники и помехи. По вертикальной оси размещены значения амплитуды гармоник в векторе Sf, по оси t отсчеты с периодом сдвига окна анализа (125 мс), по оси f - порядковый номер максимума. Проезд техники можно выделить на фиг.4, а приблизительно с 300-го по 390-й временной отсчет.
Из фиг.4 видно, что данный признак имеет хороший динамический диапазон и может использоваться в условиях низкого уровня посторонних шумов, однако его помехозащищенность крайне мала. Поэтому необходимо вводить дополнительную информацию о частотах, на которых наблюдаются эти максимумы. Эти частоты служат в качестве весовых коэффициентов (3):

где k - номер гармоники в векторе Мk, имеющий амплитуду Sf.
Визуализация матрицы Gf показана на фиг.4.
Так как амплитуды гармоник с большой частотой умножаются на больший коэффициент k, то спектр выравнивается (фиг.5). Таким образом, после частотной коррекции вектор наибольших амплитуд в спектре сигнала Gf выравнивается по сравнению со значениями вектора Sf.
После вычисления вектора признаков определяется его среднее значение (первый признак) (4):
и среднеквадратическое отклонение в нем (второй признак) (5):

Полученное среднее значение поступает на вход первого порогового устройства 11 и на первый вход второго порогового устройства 12, а среднеквадратическое отклонение - на первый вход блока вычисления второго порога 10.
В первом пороговом устройстве 11 формируется адаптивный порог. Его значение стремится с заданной скоростью возрастания к среднему значению, умноженному на чувствительность. Значение порога корректируется в каждом временном окне. Если среднее значение будет больше порога, то на вход схемы «И» 13 поступает логическая «1». Значения скорости возрастания порога и чувствительность устанавливаются по экспериментальным данным перед работой устройства.
Во втором пороговом устройстве 12 в качестве порога используется скорректированное среднеквадратическое отклонение. Если среднее значение будет больше порога, то на вход схемы «И» 13 поступает логическая «1».
Скорректированное среднеквадратическое отклонение определяется в блоке вычисления второго порога 10 как произведение среднеквадратического отклонения и корректирующего множителя, который находится в блоке оценки изменения уровня сигнала внутри временного окна 6. Для вычисления этого корректирующего множителя временное окно разбивается на 10 интервалов. В каждом вычисляется среднее значение по модулю, по которым далее вычисляется среднеквадратическое отклонение. Далее это значение делится на минимальное среднее значение. Корректирующий множитель позволяет учитывать особенность сигнала во временной области.
В схеме «И» 13 принимается решение об обнаружении движущейся наземной техники. Если произойдет превышение сразу двух порогов в пороговых устройствах 11 и 12, то устройство примет решение об обнаружении движущейся наземной техники.
На фиг.6 изображены графики изменения среднего значения амплитуды спектра, его среднеквадратического отклонения и адаптивного порога при проезде техники на расстоянии 30 м от микрофона. По оси абсцисс представлено время в секундах. С 50-й секунды на спектрограмме можно наблюдать увеличение мощности сигнала в низкочастотной области. В это время микрофон начинает «слышать» приближение техники. На 65-й секунде техника проезжает траверз. По графику изменения среднего значения видно, что мощность сигнала в этот момент максимальна и значительно превышает адаптивный порог (пунктирная линия). Скорректированное среднеквадратическое отклонение при проезде техники также возрастает (линия из точек). Однако в отдельные моменты времени, когда сигнал близок к стационарному, отклонение меньше, чем среднее значение. Сигнал тревоги ни фиг.6 показан вертикальными линиями.
Источники информации
1. Amir Averbuch, Valery Zheludev, Neta Rabin, Alon Schclar. Wavelet based acoustic detection of moving vehicles (Акустическое обнаружение движущейся наземной техники, основанное на вейвлет-анализе). School of Computer Science Tel Aviv University, Tel Aviv 69978, Israel March 11, 2007.
2. Патент США 2009/046359 А2, G08G 1/04. Berger Theodore W., Dibazar Alireza, Lu Bing. Detection and classification of running vehicles based on acoustic signatures. (Обнаружение и классификация движущихся наземных транспортных средств, основанных на акустических сигналах).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПАУЗ В РЕЧЕВЫХ СИГНАЛАХ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2317595C1 |
| НЕЙРОСЕТЕВАЯ АДАПТИВНАЯ СИСТЕМА РАСПОЗНАВАНИЯ ОБЪЕКТОВ ПО ИХ АКУСТИЧЕСКИМ ИЗЛУЧЕНИЯМ | 2013 |
|
RU2513719C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОДОИЗМЕЩЕНИЯ НАДВОДНОГО КОРАБЛЯ ПРИ ЕГО ШУМОПЕЛЕНГОВАНИИ | 2016 |
|
RU2645013C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2589290C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПАУЗ В РЕЧЕВЫХ СИГНАЛАХ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2010 |
|
RU2436173C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2774733C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПАУЗ В РЕЧЕВЫХ СИГНАЛАХ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2008 |
|
RU2399103C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАТИВНОСТИ СПЕКТРАЛЬНЫХ СОСТАВЛЯЮЩИХ АКУСТИЧЕСКОГО СИГНАЛА ПЧЕЛИНЫХ СЕМЕЙ ПРИ РАСПОЗНАВАНИИ ИХ СОСТОЯНИЙ | 1998 |
|
RU2167518C2 |


Устройство содержит микрофон (1), предварительный усилитель (2), аналого-цифровой преобразователь (3), формирователь временного окна (4), блок (7) спектрального представления сигнала, фильтр верхних частот (5), блок (6) оценки изменения уровня сигнала внутри временного окна, блок (8) нахождения максимумов, блок (9) частотной коррекции, блок (10) вычисления второго порога, первое пороговое устройство (11), второе пороговое устройство (12) и схему «И» (13). Повышается эффективность устройства. 6 ил.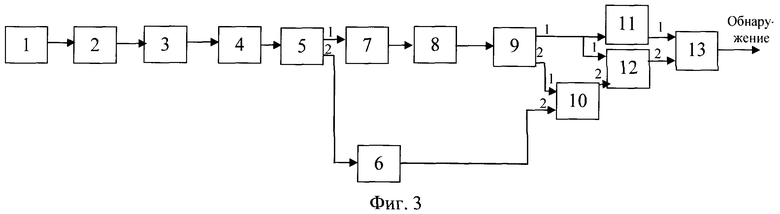
Устройство обнаружения движущихся наземных транспортных средств по акустическим сигналам, содержащее предварительный усилитель, подключенный к выходу микрофона и к входу аналого-цифрового преобразователя, выход которого соединен с входом формирователя временного окна, и блок спектрального представления сигнала, отличающееся тем, что в устройство дополнительно введены фильтр верхних частот, блок оценки изменения уровня сигнала внутри временного окна, блок нахождения максимумов, блок частотной коррекции, блок вычисления второго порога, первое пороговое устройство, второе пороговое устройство и схема «И», причем вход фильтра верхних частот подключен к выходу формирователя временного окна, а первый выход - к входу блока спектрального представления сигнала, выход которого соединен с входом блока нахождения максимумов, выход которого подключен к входу блока частотной коррекции, первый выход которого подключен к входу первого порогового устройства и к первому входу второго порогового устройства, второй выход блока частотной коррекции соединен с первым входом блока вычисления второго порога, второй вход которого соединен с выходом блока оценки изменения уровня сигнала внутри временного окна, вход которого соединен с вторым выходом фильтра верхних частот, выход блока вычисления второго порога подключен к второму входу второго порогового устройства, выходы пороговых устройств подключены к входам схемы «И».
| WO 2009046359 A2, 09.04.2009 | |||
| US 7071841 B2, 04.07.2006 | |||
| US 6195608 B1, 27.02.2001. |

