Изобретение относится к области сейсмической разведки и может быть использовано для целеуказания средствам поражения, в устройствах управления подрывом инженерных боеприпасов, а также для мониторинга участков местности и контроля несанкционированного доступа к охраняемым объектам.
Известны различные способы классификации движущихся наземных объектов по результатам анализа сейсмосигналов, возбуждаемых ими в поверхностном слое почвы в процессе движения. Например, в [1], [2] и [3] описана работа устройств, характеризующая способы классификации движущихся объектов в контролируемой зоне, отличающиеся особенностями поиска в сейсмосигнале различных признаковых параметров для использования их при классификации объектов.
В [1] для этого используется модель авторегрессии с учётом того, что случайные процессы могут описываться как авторегрессия некоторого порядка, характеризующая степень влияния предыдущих отсчетов сигнала на текущий отсчёт.
По принятой реализации сейсмосигнала оцениваются коэффициенты регрессии и сравниваются с хранящимися в банке данных усредненных моделей, что позволяет вычислить условную вероятность принадлежности объекта к некоторому классу по результатам анализа принятого сейсмосигнала. Решение о классе объекта принимается по критерию максимума условной вероятности.
К недостаткам этого способа можно отнести следующие:
- необходимость хранения в банке данных усреднённых моделей
коэффициентов регрессии и сведений о законах их распределения;
- количество каналов классификации должно быть равно количеству классов объектов;
- громоздкость вычислительного алгоритма;
- коэффициенты регрессии относятся к параметрам, зависящим от типа и состояния грунта, времени года, помеховой обстановки и других факторов, поэтому при изменении свойств грунта в спектрах сейсмических сигналов будет наблюдаться смещение частотных компонент в область высоких или низких частот, то есть достоверное распознавание объектов по результатам анализа таких сигналов возможно при использовании результатов анализа динамики поведения сейсмосигнала на некотором заданном интервале времени.
В [2] оценивается степень близости сейсмосигналов, источниками которых являются подлежащие распознаванию классы подвижных объектов, к эталонным сейсмосигналам.
После обнаружения объекта сейсмосигнал нормируется по амплитуде и дискретизируется с учётом теоремы Котельникова. Далее он подвергается преобразованию Фурье, направленному на выделение классификационных признаков, которыми являются значения усредненных частотных составляющих в характерных для определения классов объектов в частотных диапазонах.
Частотные признаки требуются для вычисления меры близости к эталонам сейсмосигналов, источниками которых являются подлежащие распознаванию классы объектов, которые хранятся в банке данных. Там же хранятся и значения сумм базисных функций, необходимых для вычисления значений частотных признаков в реальном масштабе времени.
После вычисления меры близости происходит выбор класса объекта: по критерию минимума значения меры выбираются два класса с сохранением информации о степени близости. Далее на основе анализа только частотных признаков сейсмического сигнала с использованием информации о частоте появления пар классов с учетом степени близости к эталону принимается решение о распознавании класса объекта. Для этого используется информация, представляющая собой статистические данные о частоте появления таких пар в виде матрицы также хранящаяся в банке данных.
Основными недостатками способа являются:
- необходимость хранения в банке данных значения сумм базисных функций и матриц, содержащих статистические данные о частоте появления классов с учетом степени близости к эталону;
- при увеличении числа классов объектов распознавания для увеличения вероятности правильной классификации, необходимо увеличивать количество признаков, характерных для выбранных классов;
- громоздкость вычислительного алгоритма;
- частотные признаки зависимы от типа и состояния поверхностного слоя почвы, которое определяется как помеховыми факторами, так и погодно-климатическими условиями, поэтому при изменении состояния поверхностного слоя почвы в спектрах сейсмических сигналов будет наблюдаться смещение частотных компонент в область высоких или низких частот, что отрицательно повлияет на частотные признаки, а это снизит вероятность правильной классификации объектов.
В [3] способ основан на анализе динамики изменения сейсмосигнала во времени. Наличие закономерностей в поведении сейсмосигнала (времени нарастания и спада фронтов, времени пребывания сейсмосигнала в экстремумах и т.п.). Это дает возможность сделать заключение о том, что сейсмический сигнал будет в определенной последовательности проходить некоторые заданные условные пороги. Причем для разных источников последовательность прохождения будет существенно различаться.
При ограниченном объеме информации о поведении сигналов от всех источников строится усредненный образ сейсмосигнала (эталон) по результатам анализа нескольких десятков реализаций сейсмосигналов, возбуждаемых в поверхностном слое почвы при движении какого-либо класса наземной техники. Все остальные сейсмосигналы, которые в результате анализа не будут подходить под заданное правило с заданным значением точности, считаются нераспознанными или помехами. Сформированный усредненный образ сигнала в процессе работы хранится в банке в виде набора значений пороговых напряжений и значений временных интервалов прохождения этих порогов. Число тех и других выбирается исходя из требований точности классификации объектов при анализе сейсмосигналов: чем больше число заданных порогов, тем точнее отслеживаются признаки объекта при анализе сейсмосигнала.
После регистрации сейсмосигнал подвергается предварительной фильтрации, усиливается в характерных полосах частот и производится его дискретизация в соответствии с теоремой Котельникова.
Далее дискретизированный сейсмосигнал анализируется в соответствии с алгоритмом, хранящимся в банке данных. Здесь контролируется выполнение ряда условий:
- должны быть превышены пороги, определяющие необходимое значение амплитуды сигнала;
- ряд временных критериев воздействия сигнала (период, длительность, паузы между импульсами) должны мало отличаться от эталонных.
При совпадении последовательности временных интервалов прохождения порогов с эталонными интервалами, хранящимися в банке данных, формируется логический сигнал о распознавании заданного класса объекта.
Если необходимо классифицировать несколько типов объектов необходимо иметь столько же каналов классификации, которые будут отличаться тем, что в их банках хранятся другие значения порогов срабатывания и другие временные интервалы их прохождения.
К основным недостаткам можно отнести следующее:
- необходимость хранения набора эталонных значений пороговых напряжений и значений временных интервалов прохождения этих порогов для сравнения с временной структурой поступившего сейсмосигнала;
- обработка сигнала только во временной области может привести к тому, что воздействие внешних факторов (помех, погодно-климатических явлений и т.п.) скажется на перераспределении энергии частотных составляющих, что исказит временную структуру сейсмосигнала и приведёт к снижению вероятности правильной классификации объекта;
- возможность реализации обнаружения по сейсмическим сигналам, принятым при высоких уровнях сейсмофона, что при удалении источника сейсмических колебаний может снизить значения полезных сейсмосигналов до уровня выбросов сейсмофона и после обнаружения привести к ложной классификации.
Наиболее близким аналогом по технической сущности к предлагаемому является способ, описанный в [4], принятый за прототип.
В способе-прототипе предложен вариант снижения вероятности ложной классификации подвижных наземных объектов путём введения порога обнаружения с величиной уровня, зависящей от интенсивности внешних помех.
Как и в [3], способ-прототип основывается на динамике изменения сейсмосигнала во времени. Отличием является установление экспериментальным путём закона распределения для контролируемого классификационного признака и его параметров с целью установления степени влияния уровня сейсмопомех на качество обнаружения объектов по результатам анализа поступающих сейсмосигналов. В качестве такого признака используют максимальные значения импульсных сигналов.
Предварительно по результатам статистической обработки записей сигналов сейсмического фона в количестве 1 млн. 254 тыс. отсчетов на выходе полосового фильтра с выбранными параметрами была выдвинута гипотеза о том, что распределение максимумов огибающей на выходе такого фильтра подчиняется закону распределения максимумов, описываемого выражением
В этом распределении параметры λ и μ связаны с математическим ожиданием процесса и средним квадратическим отклонением следующими зависимостями


При этом соотношение для вероятности ложного обнаружения или вероятность превышения уровня V0 под воздействием сейсмического фона находят с использованием функции распределения (1)
Если контролировать одновременное превышение уровня порога, например, в двух соседних временных окнах за время nТ0 (n=2), то вероятность независимых событий равна 
Способ-прототип заключается в следующем.
Сформированный усредненный образ сейсмосигнала в процессе работы хранится в банке данных в виде набора значений пороговых напряжений и значений временных интервалов прохождения этих порогов, число тех и других выбирается исходя из требований точности классификации подвижных объектов при анализе сейсмосигналов.
В случае отсутствия подвижных объектов наземной техники.
1. Сейсмофон фильтруется в полосе частот (16-32) Гц.
2. Максимум огибающей хm выбирается из совокупности экстремальных значений сейсмофона 
3. По полученным в k предыдущих окнах результатам анализа значений xm для n-го шага оценивают математическое ожидание 

4. Оцениваются значения параметров закона распределения максимумов

и уровень порога V0 с аргументами (5), обеспечивающий требуемую вероятность ложных обнаружений Рл1 за всё установленное время функционирования реализующего устройства Та, находят с использованием (3)

где вероятность ложных обнаружений за время однократного анализа сейсмофона в двух соседних временных окнах в соответствии с (4) будет равна

Здесь величина Рл,зад определяется требованиями, предъявляемыми к реализующему устройству в условиях эксплуатации.
Показано, что при выполнении критерия Колмогорова распределение максимумов огибающей подчиняется закону распределения максимумов с численными значениями параметров
μ = 1,196·10-3 В, λ = 2,259·10-4 В (8)
при значениях

В присутствии подвижных объектов наземной техники.
1. Принимаемый сейсмосигнал подвергается предварительной фильтрации и усилению в характерных полосах частот и в соответствии с теоремой Котельникова осуществляется его дискретизация.
2. Дискретизированный сейсмосигнал анализируется в соответствии с определённым алгоритмом. При этом так же, как и в [3], контролируется выполнение ряда тех же условий:
- превышения порогов, определяющих необходимое значение амплитуды сигнала;
- последовательность временных критериев воздействия сигнала (период, длительность, паузы между импульсами), которая должна мало отличаться от эталонной последовательности.
3. При совпадении последовательности временных интервалов прохождения порогов с эталонными интервалами, хранящимися в банке данных, также формируется логический сигнал о распознавании заданного класса объекта.
Если необходимо классифицировать несколько типов объектов необходимо иметь столько же каналов классификации, которые будут отличаться тем, что в их банках данных будут храниться другие значения порогов срабатывания и другие временные интервалы их прохождения.
На фиг. 1а представлена зависимость (3) с использованием (6) и (8), а на фиг. 1б – зависимость (6) в логарифмическом масштабе с использованием (7) и (8) для Та = 30 суток и Рл,зад = 10-6.
Из анализа фиг. 1 следует, что в отличие от результатов, представленных в [3], в случае снижения значений полезных сейсмосигналов до уровня выбросов сейсмофона изменением величины порога обнаружения V0 в нужную сторону можно минимизировать вероятность ложной классификации объекта.
Способ-прототип характеризуется частью недостатков, а именно:
- необходимость хранения набора эталонных значений пороговых напряжений и значений временных интервалов прохождения этих порогов для сравнения с временной структурой поступившего сейсмосигнала;
- обработка сигнала только во временной области может привести к тому, что воздействие внешних факторов (помех, погодно-климатических явлений и т.п.) скажется на перераспределении энергии частотных составляющих, что исказит временную структуру сейсмосигнала и приведёт к снижению вероятности правильной классификации объекта.
Задача предлагаемого технического решения – адаптация процесса классификации ОНТ к изменению уровня внешних шумовых, помеховых или погодно-климатических условий, что повышает робастность способа, вероятность правильной классификации объектов наземной техники (ОНТ) и уменьшает вероятность перепутывания классов ОНТ.
Для решения поставленной задачи в способе классификации движущихся объектов наземной техники по сейсмическому сигналу, включающем регистрацию сейсмического сигнала, возбуждаемого подвижным объектом наземной техники, фильтрацию его в выбранной полосе частот, усиление и дискретизацию, согласно изобретению, в отсутствие объекта осуществляется деление выбранного диапазона рабочих частот на две полосы – низкочастотную и высокочастотную по условию равенства в них спектральных плотностей сейсмофона, периодической оценкой средней величины энергии сейсмофона в выбранной полосе за время наблюдения сейсмофона, а также значения коэффициента выравнивания энергий сейсмофона в этих полосах, как величины обратной отношению усреднённой на промежутке времени наблюдения энергии сейсмофона низкочастотной полосы к усреднённой на этом же временном промежутке энергии сейсмофона высокочастотной полосы; в присутствии подвижного объекта наземной техники на длительности текущего временного окна осуществляется деление величины энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе на величину энергии смеси полезного сейсмосигнала и сейсмофона в высокочастотной полосе, домножение полученного частного от деления на последнюю оценку значения выравнивающего коэффициента и сравнение текущих значений результата с двумя порогами – верхним и нижним; в случае пересечения этими текущими значениями нижнего или верхнего порогов сверху вниз или снизу вверх фиксируется факт обнаружения объекта наземной техники, в том случае, когда после пересечения данными текущими значениями нижнего или верхнего порогов они остаются между этими порогами, будет реализован вариант пропуска полезного сейсмосигнала – необнаружение объекта, когда все текущие значения располагаются выше верхнего порога, то результат игнорируется; при обнаружении подвижного объекта вычисляется отношение текущих значений энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе к средней энергии сейсмофона, вычисленной в течение последнего промежутка времени наблюдения в отсутствии подвижных объектов, и на результат этого отношения делится результат отношения энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе к такой же энергии в высокочастотной полосе; если последовательность минимальных значений полученного результата, сгруппированных в небольшой окрестности вокруг точки траверза, располагается ниже статистически обоснованной величины порога классификации, то объект относят к классу «гусеница», если ниже этого порога, то к классу «колесо».
Были рассмотрены сейсмические сигналы, возбуждаемые объектами наземной техники в поверхностном слое почвы при прохождении их на различных траверзных расстояниях от трёхкомпонентного сейсмоприёмника; проанализированы спектры при движении объектов в окрестности точек траверза. Исходя из накопленного опыта работы в этой области, был сделан вывод о том, что рациональная ширина общей полосы исследуемых спектров может быть ограничена величиной (30-35) Гц. При этом для объектов наземной техники класса «колесо» самой статистически устойчивой составляющей в этой полосе является компонента с частотой fКТ = 15 Гц, в то время, как для объектов наземной техники класса «гусеница» такая компонента характеризуется частотой fГТ = 25 Гц. Это объясняется тем, что при движении колёсных объектов колебания их корпусов на подвесках (рессорах и пр.) посредством сцепления колёс объекта с грунтом генерируют в нём спектр частот, группирующихся вокруг частоты fКТ. При движении гусеничных объектов удары многочисленных катков по части гусениц, которые сцепляются с грунтом, генерируют в нём спектр частот, группирующихся вокруг частоты fГТ. Кроме того, известно, что низкочастотная часть спектра (примерно от 0 до 10 Гц) инициируется в основном сейсмофоном, имеющим самые различные источники, такие как отголоски процессов дальней вулканической деятельности и дальних землетрясений; ближних ветровых воздействий на растительный покров почвы и т. п. В связи с этим при поиске информативных параметров изучаемых сейсмосигналов, их спектры рассматривались в границах (10-32) Гц. Поэтому с учётом теоремы Найквиста была выбрана частота дискретизации при оцифровке аналоговых сигналов равная fd = 64 Гц.
Исходя из вышесказанного, вся полоса частот Δf = f1 – f2 = 32-10 = 22 Гц разделена на две такие части
Δf1 = fx - f1 и Δf2 = f2 - fx+1 = Δf - Δf1,
у которых отношение содержащихся в них энергий сейсмофона, полученных его накоплением на промежутке времени наблюдения определённой длительности, было бы близко к единице. Здесь fx – частота, делящая полосу Δf в необходимом соотношении. Такое равновесное состояние шумовых энергий в этих полосах позволяет определять значения энергий сейсмических сигналов, возбуждаемых различными классами объектов наземной техники в поверхностном слое почвы, близких к истинным. Если же этот баланс нарушается, то необходимо периодически компенсировать отрицательное влияние перераспределения частотных составляющих в обоснованно выбранных низкочастотной и высокочастотной составляющих общей полосы частот.
Предлагаемый способ включает следующие операции.
В отсутствие или наличии объектов наземной техники.
1. Дискретизировать три компоненты либо естественного сейсмического фона 
2. Ввести количество частотных отсчётов Nf = 32: n = 0, 1,… ,
Nf-1 - текущие номера отсчётов,
ввести последовательность периодов дискретизации (скользящих временных окон, на которых укладывается Np = 64 временных отсчёта), количество которых также определится величиной времени наблюдения:
k = 0, 1, … - номера текущих позиций временных окон

где hk = kNp.
Следовательно, величины (9) представляют собой матрицы, где каждая строка является временным окном на k-ой текущей позиции, содержащая входящие в неё с 0-го по Np-1-й отсчёты.
В отсутствие объектов наземной техники.
1. Определить рациональную величину делящей частоты fx.
1.1. На выбранной длительности промежутка времени наблюдения сейсмофона, содержащем Nu текущих позиций временного окна, с использованием преобразования Фурье найти текущие спектральные плотности трёх компонент естественного сейсмического фона в полосе Δf, определить полную спектральную плотность сейсмофона в этой полосе

Здесь
текущие спектральные плотности x-, y- и z-компонент сейсмофона на k-ой позиции временного окна; 
В качестве примера на фиг. 2а и фиг. 2б в этой полосе частот приведены модули полных спектральных плотностей 
Анализ изображённого на фиг. 2, а также множества им подобных показал, что на основе спектральной плотности сейсмофона можно с достаточной точностью определить искомую среднестатистическую величину делящей частоты, которая обеспечивает величину отношения усреднённых полных спектральных плотностей низкочастотной и высокочастотной полос общего спектра 
представляют собой усреднённые по всем Nu текущим позициям временного окна спектральные плотности сейсмофона в низкочастотной и высокочастотной полосах. Скобки < * > означают операцию усреднения на длительности временного окна (64 отсчёта).
1.2. В найденных частотных полосах Δf1 = 19-10=9 Гц и
Δf2 = 32-20=12 Гц найти текущие значения полных энергий сейсмофона 

где
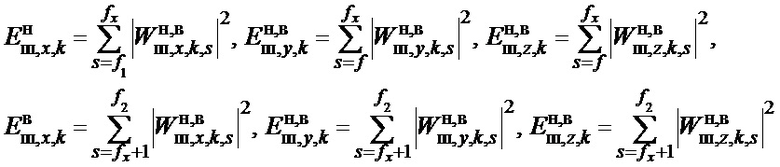
энергии компонент сейсмофона в соответствующих частотных полосах.
1.3. Обеспечить фильтрацию этих энергий комплементарным фильтром с коэффициентами усиления К1 = 0,9 и К2 = 0,1:

1.4. Найти отношение текущих значений отфильтрованных энергий сейсмофона в общем случае неравного единице
1.5. Вычислить среднее значение по всем текущим позициям временного окна

1.6. Найти выравнивающий коэффициент как величину, обратную (14)
1.7. Скомпенсировать влияние внешних факторов на распределение энергии сейсмофона по частотным составляющим полос (восстановить энергетический баланс относительно порога равновесия равного единице)
1.8. Периодически оценивать величину соотношения (14), находить текущее значение выравнивающего коэффициента и с его помощью восстанавливать баланс энергий сейсмофона в частотных полос Δf1 и Δf2, если это потребуется.
При воздействии сейсмосигналов от объектов наземной техники.
1. По аналогии с (14) с учётом использования найденного на последнем оценочном промежутке времени наблюдения значения выравнивающего коэффициента определить отношение энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе к такой же энергии в высокочастотной полосе
2. Отслеживать текущие значения скорректированного соотношения (16) и сравнивать их с двумя порогами Рmin=const1 и Рmax= const2, при этом в случае пересечения скорректированным соотношением (16) порогов Рmin и Рmax сверху вниз или снизу вверх фиксируется факт обнаружения объекта наземной техники.
Величина порогов Рmin и Рmax находилась по результатам анализа соотношения (16), проведённого для записей сейсмофонов в различные дни и при различных погодных условиях. Выяснилось, что эти пределы с достаточной для практики точностью определяются величинами constн = 0,75 и constв =1,75. Таким образом, когда объект наземной техники приближается к сейсмоприёмнику издалека, соотношение (15) постепенно переходит в соотношение (16).
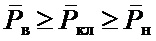
На фиг. 3а представлен пример обнаружения грузового автомобиля «УРАЛ», движущегося со скоростью 30 км/ч при расстоянии от сейсмоприёмника до точки траверза 100 м; на фиг. 3б – «БМП-3», движущейся с той же скоростью при таком же траверзном расстоянии. Здесь жирными штрихпунктирными линиями изображены уровни Рmin и Рmax, а жирным штрихом – порог равновесия.
Если отсчёты (16) пересекают пороги Рmax и Рmin сверху вниз, то это значит, что объект техники заводит достаточно мощный мотор в зоне чувствительности сейсмоприёмника и затем начинает движение. На фиг. 4 проиллюстрирована ситуация, когда танк «Т-72» завёл мотор в 100 метрах в стороне от точки траверза и начал движение со средней скоростью 20 км/ч.
Если же при прохождении объекта по трассе отсчёты (16) будут располагаться ниже порога Рmin, либо после пересечения какого-либо из порогов Рmin или Рmax останутся между ними, то будет реализован вариант пропуска полезного сигнала (необнаружение объекта). Этот случай иллюстрирует графическое изображение (16) на фиг. 5, где грузовой автомобиль «УРАЛ» двигался со скоростью 40 км/ч при расстоянии от сейсмоприёмника до точки траверза 250 м.
Если в результате анализа пришедшего сейсмосигнала все отсчёты (16) располагаются выше порога Рmax, то это означает соответствующий дисбаланс энергий сейсмофона у низкочастотной и высокочастотной полос, который может быть вызван каким-либо внешним фактором. Так как пересечения ни одного уровня не произошло, то в этом случае обнаружение игнорируется. Таким образом реализуется снижение вероятности ложного обнаружения объекта.
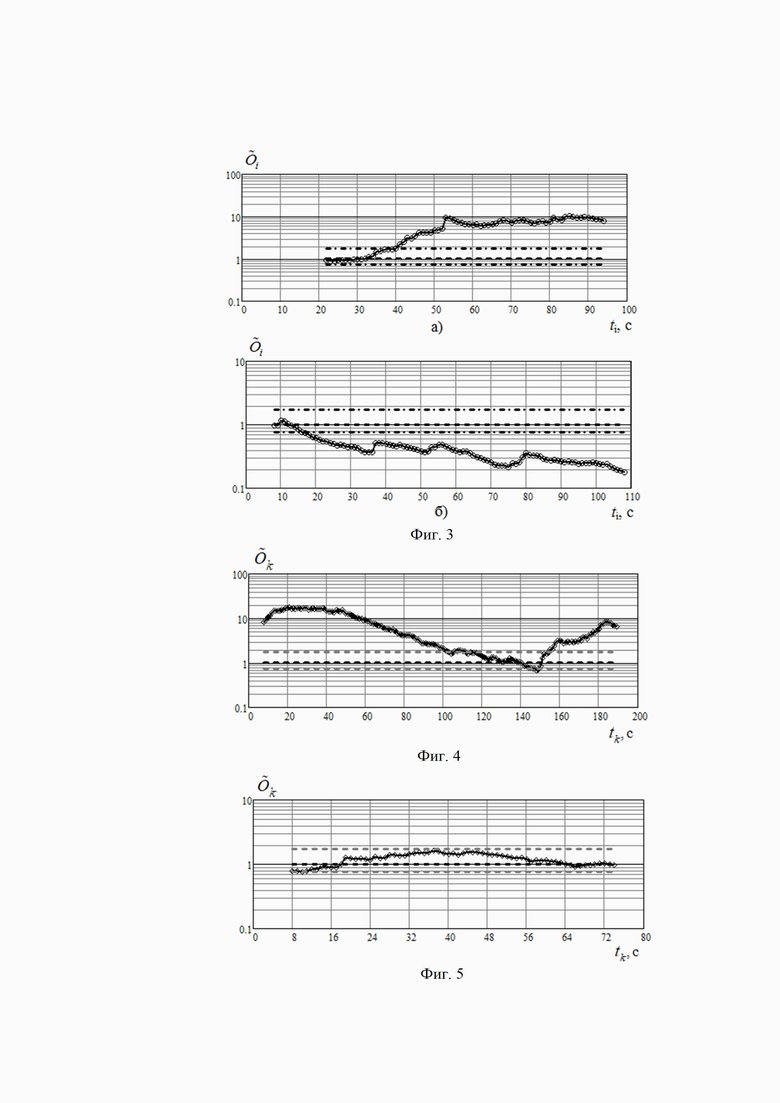
На фиг. 6 и фиг. 7 представлены сглаженные и усиленные текущие значения энергий сейсмосигналов в низкочастотных полосах, возбуждаемых подвижными наземными объектами различных классов в грунте. На фиг. 6а графическое изображение относится к гусеничному варианту БМП-3, движущемуся со скоростью около 30 км/ч, а на фиг. 6б - к танку Т-72, движущемуся со скоростью около 40 км/ч. Траверзное расстояние для этих объектов равно 200 м. Изображённое на фиг. 7а относится к автомобилю УАЗ-469, движущемуся со скоростью около 25 км/ч, а на фиг. 7б - к автомобилю УРАЛ, движущемуся со скоростью около 30 км/ч. Для этих объектов траверзное расстояние равно 100 м.
Анализ фиг. 6 и фиг. 7 показывает, что даже несмотря на различие параметров движения колёсных и гусеничных объектов можно утверждать, что полная энергия смеси полезного сейсмосигнала и сейсмофона, сосредоточенная в низкочастотной полосе для гусеничного объекта больше аналогичной энергии для колёсного объекта. Причём, чем меньше отношение масс объектов класса «колесо» и класса «гусеница» 

для гусеничных объектов будет больше, чем для колёсных объектов при одинаковом траверзном расстоянии. Это определяет дальнейшие операции предлагаемого способа.
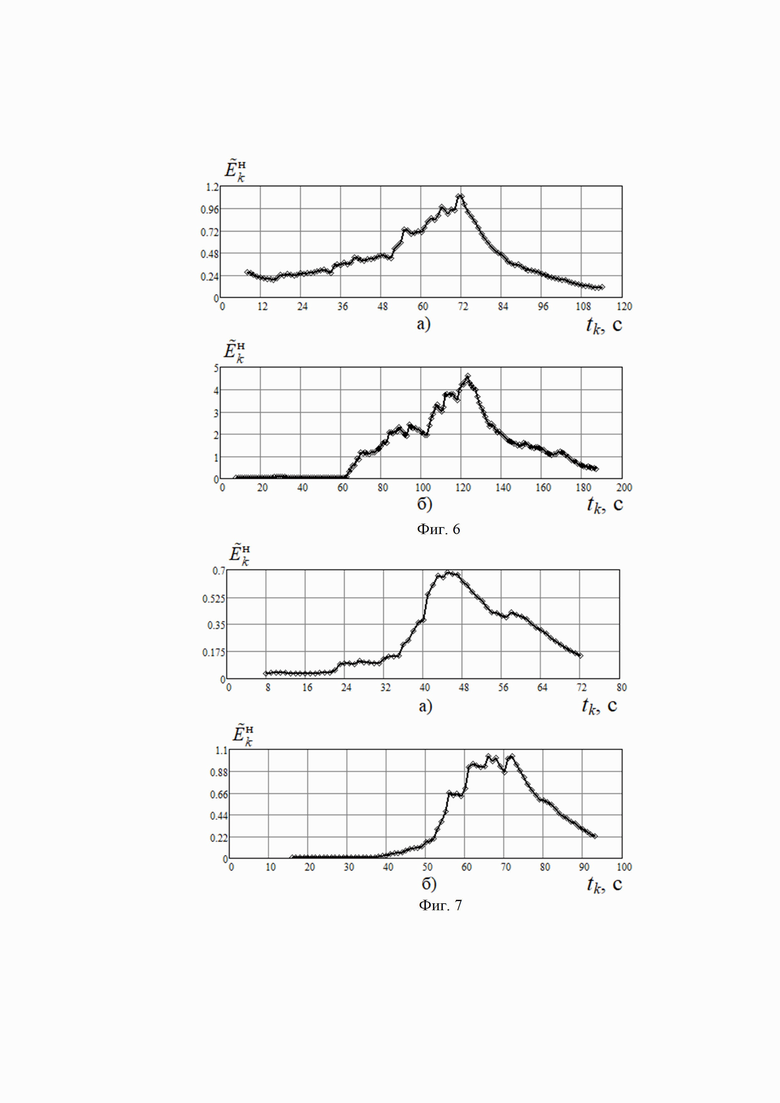
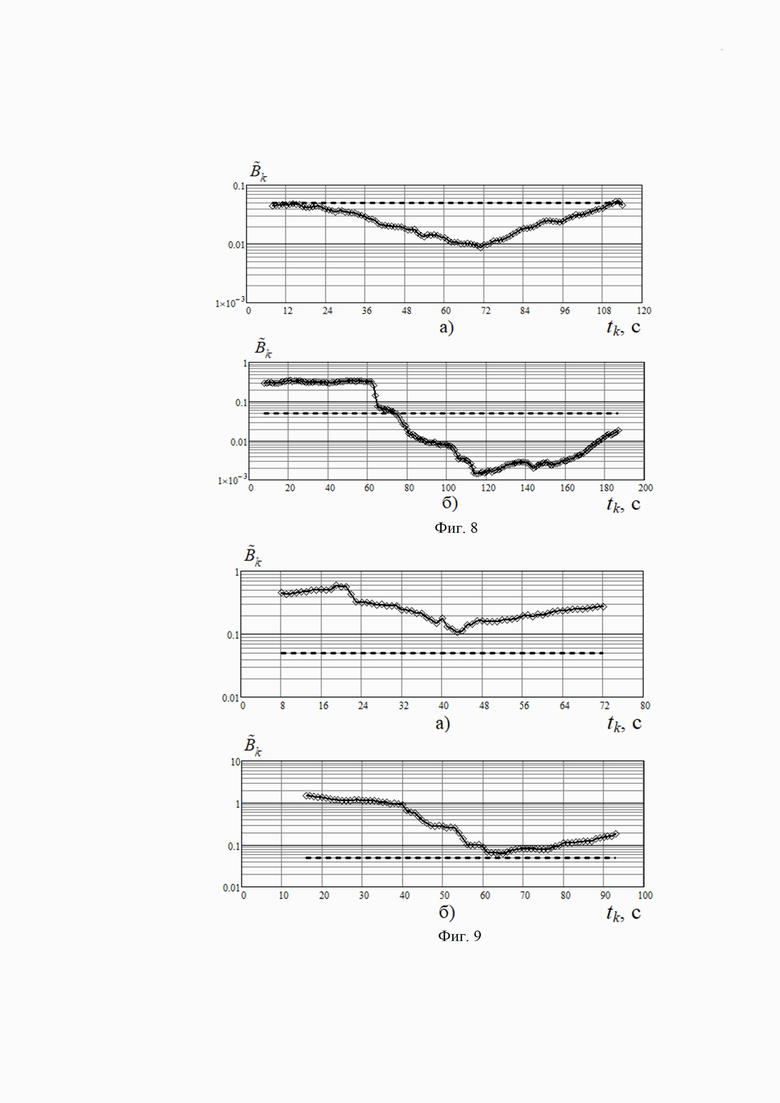
3. Построить следующее безразмерное отношение
которое можно назвать критерием различения классов объектов, так как величины текущих значений (18), с учётом сказанного выше о величине (17), должны иметь тенденцию к уменьшению до точки траверза и к увеличению после этой точки. При этом последовательность минимальных значений (18), сгруппированных в небольшой окрестности вокруг точки траверза для гусеничных объектов должны располагаться ниже аналогичных последовательностей значений (18) для колёсной техники.
Проведённые исследования достаточно представительной статистики (100 записей) сейсмосигналов от объектов изучаемых классов вполне подтвердили вывод, сформулированный в третьем пункте. В качестве иллюстрации на фиг. 8 и фиг.9 представлены графические зависимости (18), относящиеся к объектам, сглаженные и усиленные текущие значения энергий сейсмосигналов в низкочастотных полосах которых изображены на фиг. 6 и фиг. 7. На фиг. 8 и фиг. 9 жирной горизонтальной линией показана статистически обоснованная величина порога классификации.
Из анализа фиг. 8 и фиг. 9 следует, что в среднестатистическом смысле действительно последовательность минимальных значений (18), сгруппированных в небольшой окрестности вокруг точки траверза для гусеничных объектов располагаются ниже порога классификации, в то время как аналогичные последовательности значений (18) для колёсной техники располагаются выше порогового значения.
Проведённый анализ 100 записей сейсмосигналов от объектов наземной техники классов «колесо» и «гусеница» (50 шт. «колесо», 50 шт. «гусеница»), полученных при различных параметрах движения объектов, с учётом особенностей их обнаружения, а также вариантов установки сейсмодатчиков на местности, показал, что величина статистической вероятности правильной классификации объектов по укрупнённым классам «колесо» – «гусеница» 

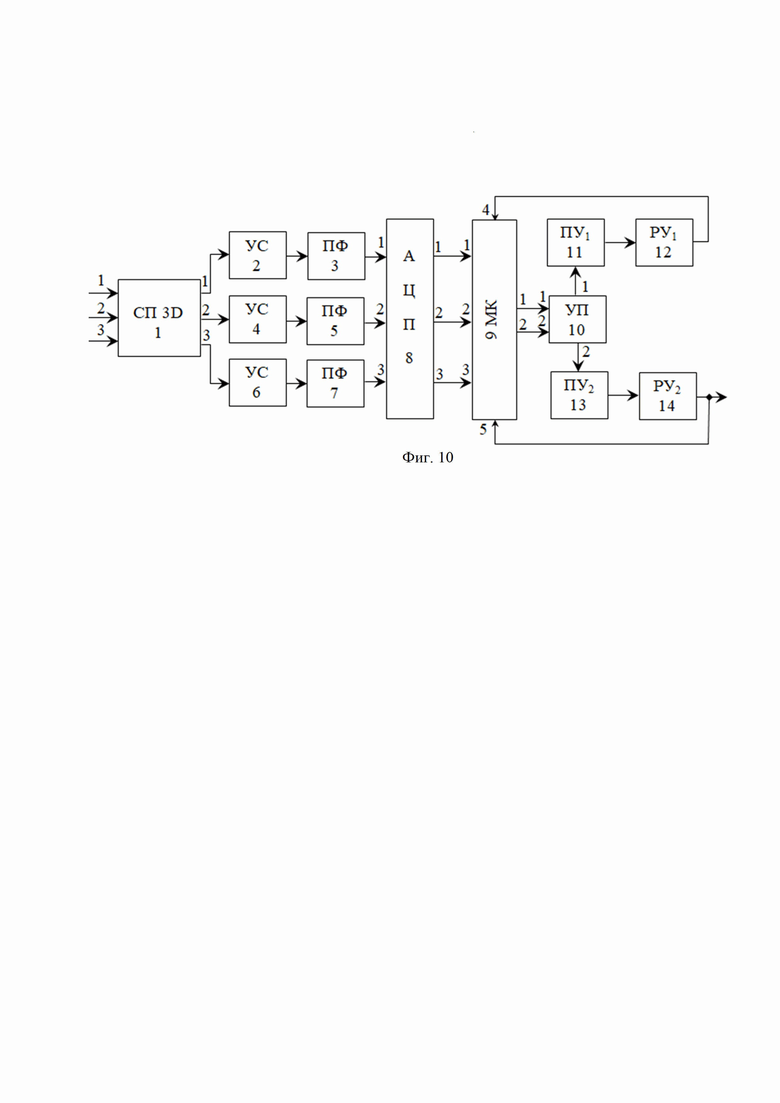
На фиг. 10 представлена укрупнённая блок схема устройства, реализующего предлагаемый способ классификации, где введены следующие обозначения:
1 – трёхкомпонентный сейсмоприёмник, три оси чувствительности которого взаимно ортогональны (СП 3D);
2, 4, 6 – первый, …, третий усилители сигнала (УС);
3, 5, 7 – первый, …, третий полосовые фильтры (ПФ);
8 – аналого-цифровой преобразователь (АЦП);
9 – микроконтроллер (МК);
10 – управляемый переключатель на два положения (УП);
11, 12 – первое и второе пороговые устройства (ПУ1 и ПУ2);
13, 14 – первое и второе решающие устройства (РУ1 и РУ2).
Устройство содержит трёхкомпонентный сейсмоприёмник 1, три выхода которого соединены со входами первого УС 2, второго УС 4 и третьего УС 6 усилителей сигнала соответственно. При этом выходы первого УС 2 второго УС 4 и третьего УС 6 усилителей сигнала через соответствующие первый ПФ 3, второй ПФ 5 и третий ПФ 7 соединены с первым, вторым и третьим входами АЦП 8 соответственно. Три выхода АЦП 8 соединены с соответствующими входами микроконтроллера 9, первый и второй выходы которого соединены с первым и вторым входами управляемого переключателя на два положения 10 соответственно. Причем первый выход УП 10 через последовательно соединенные первое пороговое устройство 11 и первое решающее устройство 12 подключен к четвертому входу микроконтроллера 9. Второй выход УП 10 через последовательно соединенные второе пороговое устройство 13 и второе решающее устройство 14 подключен к пятому входу микроконтроллера 9 и одновременно является выходом устройства классификации. Три входа трёхкомпонентного сейсмоприёмника 1 предназначены для подачи трёх взаимно ортогональных компонент сейсмосигналов.
Заявляемое устройство работает следующим образом.
В исходном состоянии управляемый переключатель 10 находится в положении, при котором второй его выход блокирован, а первый открыт. На три входа трёхкомпонентного сейсмоприёмника 1 поступают три взаимно ортогональные компоненты сейсмосигнала, где они преобразуются в электрические сигналы. Эти электрические сигналы с трёх выходов трёхкомпонентного сейсмоприёмника 1 поступают на соответствующие входы усилителей сигналов 2, 4 и 6, где усиливаются до необходимой величины. С выходов этих усилителей сигналы поступают на соответствующие входы полосовых фильтров 3, 5 и 7 каждый с полосой пропускания равной Δf = 22 Гц и граничными частотами fн = 10 Гц, fв = 32 Гц. Отфильтрованные сигналы с выходов полосовых фильтров 3, 5 и 7 поступают на три соответствующих входа аналого-цифрового преобразователя 8, где подвергаются дискретизации и с трёх его выходов дискретные сигналы поступают на соответствующие входы микроконтроллера 9. В микроконтроллере 9 в зависимости от наличия или отсутствия объекта наземной техники осуществляется обработка дискретизированных компонент в соответствии с соотношениями (9) – (16). Результаты в виде значений ткущих отсчётов с первого выхода микроконтроллера 9 поступают на вход первого порогового устройства 11, где контролируется их положение относительно величины порогов Рmax и Рmin. Результат этого контроля с выхода первого порогового устройства 11 поступает на вход первого решающего устройства 12, в котором в соответствии с поведением выходных отсчётов микроконтроллера относительно величины порогов Рmax и Рmin принимается решение о наличии или отсутствии в принятом сейсмосигнале признаков подвижного объекта наземной техники. Если в обработанном сейсмосигнале признаков подвижного объекта техники не обнаружится, то описанный цикл обнаружения повторяется после предварительного обновления данных от величины средней энергии сейсмофона 

Реализация данного устройства не вызывает затруднений, так как все блоки, кроме СП 3D 1 и УП 10 являются достаточно часто используемыми в патентах и инженерных разработках. Особенность СП 3D 1 состоит в том, что он скомпонован из трёх линейных сейсмических сенсоров, оси чувствительности взаимно ортогональны. Линейные сейсмические сенсоры достаточно хорошо известны, описаны в технической литературе, например, в [5], либо используются в соответствующих устройствах, например, в [6]. Варианты реализации управляемых переключателей на два положения 10 предложены, в частности, в [7] и [8].
Источники информации
1. Патент 2202811 (РФ). Устройство обнаружения и классификации сейсмических сигналов. МПК G01V 1/16. Крюков И.Н., Иванов В.А., Дюгованец А.П., Афанасенко А.В. Заявка № 2002113466/28 от 23.05.2002. Опубл. 20.04.2003 г.
2. Патент 2311665 (РФ). Сейсмическое устройство обнаружения и классификации объектов. МПК G01V 1/16. Сизов А.С., Стребков Д.А., Челышов С.Ю. Заявка № 2006112075/28 от 11.04.2006. Опубл. 27.11.2007 г.
3. Патент 2236027 (РФ). Устройство классификации сейсмических сигналов. МПК G01V 1/16. Крюков И.Н., Иванов В.А., Матвеев В.В. Заявка № 2003118053/28 от 19.06.2003. Опубл. 10.09.2004 г.
4. Патент 2697021 (РФ). Способ обеспечения требуемой вероятности ложных срабатываний устройства классификации сейсмических сигналов. МПК G01V 1/16, G08B 13/16; СПК G01V 1/001, G08B 13/1663, G01V 1/16. Анисимов В.И., Кравцов А.В., Русин П.В., Комяков А.В. Заявка: № 2018141621 от 27.11.2018. Опубл. 08.08.2019 г.
5. Янчич В.В. Пьезоэлектрические акселерометры на основе монолитного блока с деформацией изгиба / В.В. Янчич // Зарубежная радиоэлектроника. – 1996. – №9, стр. 63-64.
6. Патент 2204850 (РФ). Сейсмоприемник. МПК G01V 1/16. Доля В.К., Круглов А.К. Заявка № 2002112574/28 от 13.05.2002. Опубл. 20.05.2003 г.
7. Горшков, Б.И. Радиоэлектронные устройства / В.И. Горшков. - М.: Радио и связь, 1984. - 400 с.
8. Пухальский, Г.И. Проектирование дискретных устройств на интегральных микросхемах. Справочник. / Пухальский Г.И., Новосельцева Т.Я. - М.: Радио и связь, 1990. - 304 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации подвижных объектов наземной техники | 2023 |
|
RU2811811C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| Способ обнаружения подвижных объектов наземной техники | 2023 |
|
RU2816287C1 |
| Способ пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком | 2022 |
|
RU2800112C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| Способ классификации вертолётов с одним несущим винтом на режиме горизонтального полёта | 2024 |
|
RU2834238C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2003 |
|
RU2236027C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2202811C1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |

Изобретение относится к области сейсмической разведки и может быть использовано в охранно- и разведывательно-сигнализационных комплексах и системах для обработки сейсмических сигналов, генерируемых объектами наземной техники (ОНТ) в поверхностном слое почвы. Предложен способ классификации движущихся объектов наземной техники по сейсмическому сигналу, включающий регистрацию сейсмического сигнала, возбуждаемого подвижным объектом наземной техники, фильтрацию его в выбранной полосе частот, усиление и дискретизацию. Способ также включает выбор диапазона рабочих частот ΔF, характерных для сейсмических колебаний почвы, возбуждаемых ОНТ классов «колесо» или «гусеница», а также деление общего диапазона частот ΔF на две полосы Δf1 и Δf2 таким образом, чтобы в каждой из этих полос концентрировалась большая часть энергии сейсмических волн от «своего» класса ОНТ. Величина отношения энергий сигналов в этих частотных полосах, приведённая к величине отношения сигнал/шум в первой частотной полосе, относительно некоторого статистически обоснованного уровня является классификационным признаком обнаруженного ОНТ. Технический результат – адаптация процесса классификации ОНТ к изменению уровня внешних шумовых, помеховых или погодно-климатических условий, что повышает робастность способа, вероятность правильной классификации ОНТ и уменьшает вероятность перепутывания классов ОНТ. 10 ил.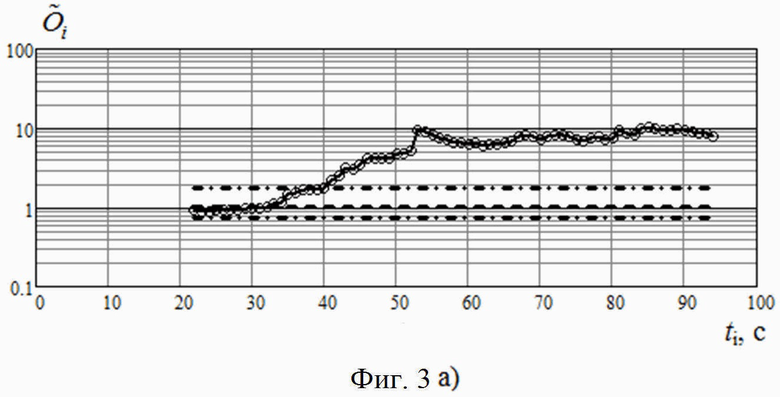
Способ классификации движущихся объектов наземной техники по сейсмическому сигналу, включающий регистрацию сейсмического сигнала, возбуждаемого подвижным объектом наземной техники, фильтрацию его в выбранной полосе частот, усиление и дискретизацию, отличающийся тем, что в отсутствие объекта осуществляется деление выбранного диапазона рабочих частот на две полосы – низкочастотную и высокочастотную - по условию равенства в них спектральных плотностей сейсмофона, периодическая оценка средней величины энергии сейсмофона в выбранной полосе за время наблюдения сейсмофона, а также значения коэффициента выравнивания энергий сейсмофона в этих полосах как величины, обратной отношению усреднённой на промежутке времени наблюдения энергии сейсмофона низкочастотной полосы к усреднённой на этом же временном промежутке энергии сейсмофона высокочастотной полосы; в присутствии подвижного объекта наземной техники на длительности текущего временного окна осуществляется деление величины энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе на величину энергии смеси полезного сейсмосигнала и сейсмофона в высокочастотной полосе, домножение полученного частного от деления на последнюю оценку значения выравнивающего коэффициента и сравнение текущих значений результата с двумя порогами – верхним и нижним; в случае пересечения этими текущими значениями нижнего или верхнего порогов сверху вниз или снизу вверх фиксируется факт обнаружения объекта наземной техники, в том случае, когда после пересечения данными текущими значениями нижнего или верхнего порогов они остаются между этими порогами, будет реализован вариант пропуска полезного сейсмосигнала – необнаружение объекта, когда все текущие значения располагаются выше верхнего порога, то результат игнорируется; при обнаружении подвижного объекта вычисляется отношение текущих значений энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе к средней энергии сейсмофона, вычисленной в течение последнего промежутка времени наблюдения в отсутствие подвижных объектов, и на результат этого отношения делится результат отношения энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе к такой же энергии в высокочастотной полосе; если последовательность минимальных значений полученного результата, сгруппированных в небольшой окрестности вокруг точки траверза, располагается ниже статистически обоснованной величины порога классификации, то объект относят к классу «гусеница», если ниже этого порога, то - к классу «колесо».
| Способ обеспечения требуемой вероятности ложных срабатываний устройства классификации сейсмических сигналов | 2018 |
|
RU2697021C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2014 |
|
RU2568142C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2008 |
|
RU2365945C1 |
| Аэродинамические весы | 1960 |
|
SU142159A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ НА ОХРАНЯЕМОМ РУБЕЖЕ | 2000 |
|
RU2165629C1 |
| US 4106003 A, 08.08.1978. | |||

