Изобретение относится к области гидроакустики и предназначено для распознавания морских судов разного водоизмещения по их шумоизлучению.
Известно [1, 2], что качка корабля при динамическом воздействии на него ветрового волнения имеет две основные координатные составляющие: бортовую и килевую. В общем случае, процесс качки является случайным процессом со спектром, описываемым кривой Релея с выраженным максимумом. Этот максимум соответствует основному периоду качки корабля, который обусловлен его водоизмещением.
В части гидроакустики качка надводных кораблей приводит к образованию низкочастотных флюктуаций шумового сигнала, принимаемого гидроакустическими средствами [3]. Характер этих флюктуаций в простых моделях считается квазигармоническим, подобным спектру качки. Поэтому среднее значение периода флюктуаций сигнала шумоизлучения будет различно для кораблей разного водоизмещения в одинаковых условиях. На этом явлении основаны способы определения водоизмещения надводных кораблей при их шумопеленговании.
Известен способ [4], в котором измеряют низкочастотные колебания сигнала шумоизлучения корабля и вычисляют период низкочастотных флюктуаций сигнала как промежуток времени между двумя соседними максимумами амплитуды. У этого способа можно выделить два недостатка. Во-первых, принятый гидроакустический шум содержит смесь полезного сигнала и помехи, что искажает вычисленный период флюктуаций сигнала. И, во-вторых, как следствие первого недостатка, процедура определения периода не может быть автоматизирована. Для уменьшения влияния этих недостатков совместно со способом [4] используют способ [5], который позволяет выделить флюктуации полезного сигнала на фоне флюктуаций помехи, в том числе и визуально.
Известен способ [6], в котором вычисляют период низкочастотных флюктуаций сигнала как величину, обратную частоте гармоники с максимальной амплитудой в спектре низкочастотных флюктуаций сигнала.
Способ содержит следующие операции:
прием шумового сигнала гидроакустической антенной;
аналого-цифровое преобразование;
детектирование;
низкочастотную фильтрацию;
вычисление спектра;
обнаружение гармоник, превышающих сплошную часть спектра;
определение периода флюктуаций сигнала на частоте гармоники с максимальной амплитудой.
Недостаток этого способа определяется принятой для его синтеза простой квазигармонической моделью флюктуаций, в рамках которой мощность флюктуаций заключена в узкой полосе частот. В работе [6] показано, что мощность флюктуаций сигнала, обусловленных качкой корабля на волнении поверхности моря, является не узкополосной, а широкополосной. Причем ширина полосы не постоянна и лежит в интервале 0,01…0,12 Гц. Зависимость ширины полосы от волнения моря и типа судна не установлена. Поэтому не представляется возможным выбрать шаг спектрального анализа, обеспечивающий одинаковое качество обнаружения гармоник спектра в различных условиях наблюдения сигнала.
Задачей заявляемого способа является определение водоизмещения надводных кораблей при любой заранее неизвестной ширине полосы частот низкочастотных флюктуаций его сигнала, обусловленных качкой на волнении поверхности моря.
Для решения поставленной задачи в способ определения водоизмещения надводного корабля при его шумопеленговании, который содержит прием шумового сигнала гидроакустической антенной, аналого-цифровое преобразование, детектирование, низкочастотную фильтрацию, вычисление спектра плотности мощности в диапазоне частот флюктуации, обусловленных качкой надводного корабля,
введены новые признаки, а именно:
определяют тренд, то есть постоянную составляющую (или сплошную часть) спектра,
формируют центрированный спектр как разность между спектром и его трендом на частоте каждой гармоники n,
определяют среднеквадратическое отклонение для центрированного спектра,
формируют нормированный спектр отношения сигнала к помехе как отношение между центрированным спектром и его среднеквадратическим отклонением на частоте каждой гармоники n,
формируют k частотных окон различной ширины, в совокупности перекрывающих диапазон ширин полосы частот качки, со средними значениями на частоте каждой гармоники спектра n,
формируют массив k×n значений средней мощности флюктуаций процесса в каждом из k×n частотных окон как сумму амплитуд гармоник, входящих в частотное окно, поделенную на ширину окна,
выбирают наибольшее значение из массива k×n значений средней мощности флюктуаций процесса, запоминают его частоту,
сравнивают наибольшее значение с порогом обнаружения и принимают решение о наличии/отсутствии низкочастотных флюктуаций, обусловленных качкой,
определяют водоизмещение надводного корабля по табличной зависимости водоизмещения от запомненной частоты низкочастотной флюктуации сигнала.
Техническим результатом изобретения является повышение помехоустойчивости способа и обеспечение возможности определения водоизмещения надводного корабля при любой заранее неизвестной ширине полосы частот низкочастотных флюктуаций его сигнала, обусловленных качкой на волнении поверхности моря.
Покажем возможность достижения указанного технического результата предложенным способом.
Рассмотрим спектр низкочастотных флюктуаций сигнала как выборку случайного процесса по частоте. По измеренной выборке надо определить наличие или отсутствие полезного сигнала, обусловленного качкой, а также среднее значение сигнала по частоте (при его наличии).
В заявляемом способе процедура формирования центрированного спектра после определения его тренда [7] позволяет исключить из рассмотрения постоянную составляющую низкочастотной помехи. А процедура формирования нормированного спектра после определения среднеквадратического отклонения позволяет перейти от спектра аддитивной смеси полезного сигнала и помехи к спектру отношения сигнала к помехе. Все вместе эти процедуры увеличивают помехоустойчивость способа, поскольку позволяют выделить полезные низкочастотные флюктуации на фоне помехи с известной единичной дисперсией.
Центрированный, а затем нормированный спектр, в случае отсутствия флюктуаций сигнала, обусловленных качкой, если его рассматривать как выборку случайного процесса, будет являться знакопеременным процессом с нулевым средним значением и единичной дисперсией. В случае наличия флюктуаций сигнала, обусловленных качкой, указанный процесс будет обладать аномальными выбросами, сосредоточенными в некоторой полосе частот. Тогда задача обнаружения флюктуаций сигнала сводится к задаче обнаружения зоны аномальных выбросов. Задаваясь вероятностью правильного обнаружения и зная значение дисперсии помехи (единица), можно легко установить пороговое значение для обнаружения аномальных выбросов, которые и будут являться флюктуациями сигнала, обусловленными качкой. При этом ширина полосы частот низкочастотных флюктуаций сигнала может быть любой, заранее не известной, поскольку на процедуру обнаружения поступает мощность по совокупности гармоник спектра, входящих в k частотных окон различной ширины, а не отдельные гармоники узкополосного анализа. Поскольку центрированный и нормированный спектр в области частот отсутствия низкочастотных флюктуаций состоит из знакопеременных элементов, наибольшее значение мощности получается в окне, наиболее совпадающем по размеру с шириной процесса качки. Тогда одновременное использование нескольких частотных окон различной ширины увеличивает помехоустойчивость способа.
Сущность изобретения поясняется чертежами.
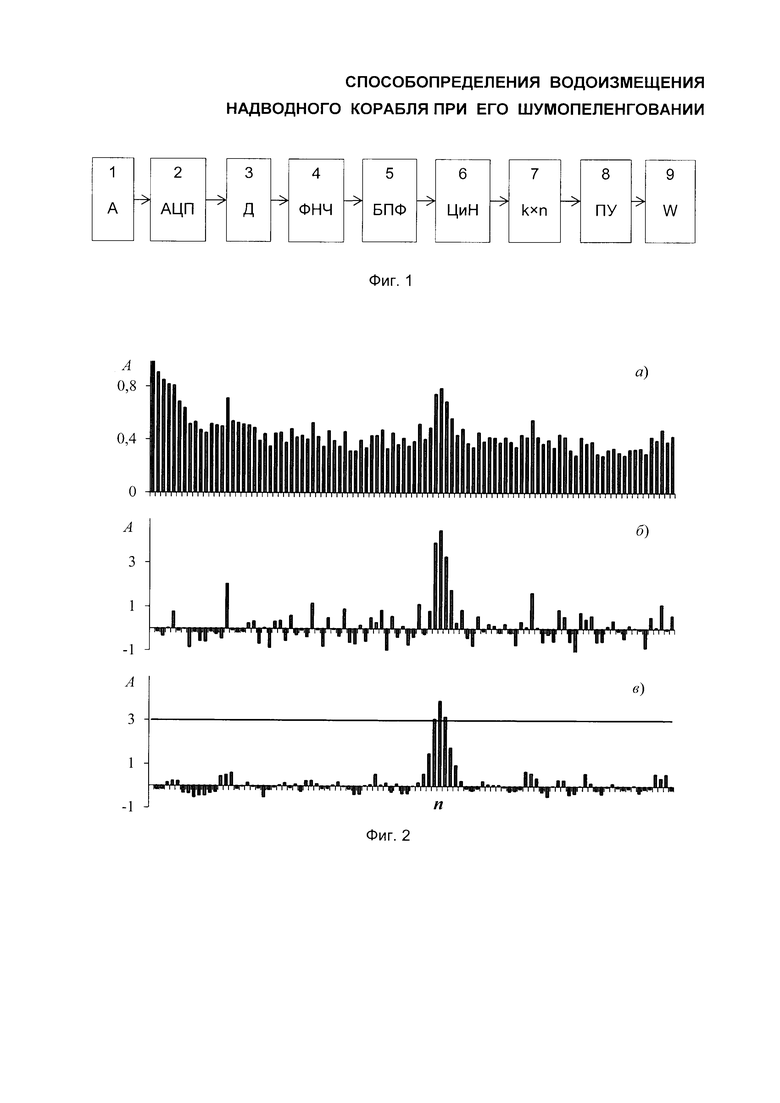
Фиг. 1 - блок-схема устройства, реализующего предлагаемый способ определения водоизмещения надводного корабля при его шумопеленговании.
Фиг. 2 - рисунок, поясняющий процедуру обнаружения низкочастотных флюктуаций сигнала.
Предлагаемый способ технически реализуется аппаратно-программными средствами по структурной схеме, приведенной на фиг. 1. Для реализации способа последовательно соединены блоки: антенна 1, блок 2 аналого-цифрового преобразования, блок 3 детектор, блок 4 фильтр низких частот, блок 5 быстрого преобразования Фурье, блок 6 формирования центрированного и нормированного спектра, блок 7 определения мощности сигнала для k×n частотных окон, блок 8 пороговое устройство, блок 9 определение водоизмещения объекта.
В динамике работы предлагаемый способ реализуется следующим образом. Шумовой сигнал объекта, принятый антенной 1, последовательно поступает в блоки 2 и 3, где осуществляется его аналогово-цифровое преобразование [8] и детектирование. В качестве детектора для выделения низкочастотных флюктуаций сигнала может выступать как квадратичный, так и линейный детектор [9].
После детектирования сигнал поступает в блоки 4 и 5, в которых последовательно осуществляется низкочастотная фильтрация и преобразование Фурье. При низкочастотной фильтрации должна быть достигнута полоса анализа, в которой наблюдаются низкочастотные флюктуации сигнала, обусловленные качкой на волнении поверхности моря [6]. В качестве преобразования Фурье для оптимизации алгоритмов расчета используется процедура быстрого преобразования Фурье с числом отсчетов, равным ближайшей степени двойки [8]. Полученная в блоке 5 спектральная плотность мощности низкочастотных флюктуаций сигнала (спектр сигнала) поступает в блок 6.
В блоке 6 для получения центрированного и нормированного спектра выполняются следующие процедуры: определяют тренд, то есть постоянную составляющую спектра, как среднее значение гармоник спектра в скользящих частотных окнах; формируют центрированный спектр как разность между спектром и его трендом на частоте каждой гармоники n; определяют среднеквадратическое отклонение для центрированного спектра; формируют нормированный спектр как отношение между центрированным спектром и его среднеквадратическим отклонением на частоте каждой гармоники n. Все указанные процедуры являются стандартными [8] для выборки случайного процесса, в качестве которой можно рассматривать спектр сигнала. Результат обработки блока 6 в виде центрированного и нормированного спектра поступает в блок 7.
В блоке 7 на частоте каждой гармоники спектра n формируют по k частотных окон разной ширины. Количество частотных окон k и их ширина выбираются исходя из частотного разрешения спектрального анализа, выполненного в блоке 5, и возможного диапазона ширины низкочастотных флюктуаций сигнала, обусловленных качкой [6]. Центр каждого окна (среднее значение окна) совпадает со своей гармоникой спектра. Итого получается массив из k×n частотных окон, то есть по k окон для каждой из n гармоник спектра. Для каждого элемента массива частотных окон формируют значение средней мощности флюктуаций процесса как сумму амплитуд гармоник, входящих в окно, поделенную на ширину окна в количестве гармоник, входящих в окно. Полученный массив значений поступает в блок 8.
В блоке 8 выбирают наибольшее значение из массива k×n значений мощности флюктуаций процесса и запоминают его частоту по размерности n. Затем сравнивают наибольшее значение с порогом обнаружения и принимают решение о наличии/отсутствии низкочастотных флюктуаций, обусловленных качкой. Для выбора порога обнаружения может быть применено правило обнаружения аномальных выбросов, для которого известна зависимость значения порога от вероятности правильного обнаружения [10]. При наличии положительного решения о наличии низкочастотных флюктуаций частота, соответствующая максимальному значению мощности флюктуаций процесса, поступает в блок 9.
В блоке 9 определяют водоизмещение надводного корабля по табличной зависимости водоизмещения от частоты низкочастотной флюктуации сигнала. Методика определения зависимости между водоизмещением надводного корабля и периодом его качки известна, например, из [11] (раздел 7.2.2 и, в частности, таблица 7.2 - Периоды качки судов различных типов). Период качки, в свою очередь, является величиной, обратной частоте флюктуаций сигнала [12] (термин «период»).
Способ определения водоизмещения надводного корабля поясняется фиг. 2, на которой приведен рисунок, поясняющий процедуру обнаружения низкочастотных флюктуаций сигнала.
На рисунке приведены гистограммы, полученные при обработке натурной записи шумов надводного корабля, сверху вниз: а) плотность мощности (спектр) низкочастотных флюктуаций сигнала в диапазоне частот флюктуации качкой на выходе блока 5; б) центрированный и нормированный спектр на выходе блока 6; в) средняя мощность в скользящих частотных окнах на выходе блока 7. Ось абсцисс для всех гистограмм одинакова - частота в номерах отсчетов. Ось ординат - амплитуда.
В исходном спектре низкочастотных флюктуаций сигнала на выходе блока 5 (гистограмма а)) можно заметить как отдельные узкополосные аномальные выбросы, так и широкополосную область увеличенной мощности сигнала, которая обусловлена качкой корабля на волнении. Видно, что постоянная составляющая спектра, имея большую амплитуду, затрудняет обнаружение аномальных выбросов.
После процедур формирования центрированного и нормированного спектра, выполненных в блоке 6, на гистограмме б) более ярко проявляются как узкополосные аномальные выбросы, так и широкополосная область флюктуаций сигнала, обусловленных качкой. Видно, что среднеквадратическое отклонение выборки не превышает единицы.
На гистограмме в) приведена средняя мощность сигнала в скользящих частотных окнах для окна одной ширины, согласованной с шириной области флюктуаций сигнала (три частотных отсчета), и пороговая линия. Для среднеквадратического отклонения выборки, равного единице, порог, равный трем, обеспечивает вероятность правильного обнаружения аномального выброса более 0,99. Видно, что узкополосные аномальные выбросы, не связанные с флюктуацией сигнала, обусловленной качкой, стали проявляться менее ярко. При этом уровень полезной широкополосной области флюктуаций сохранился. Превышение этого уровня порогового значения позволяет сделать вывод о наличии низкочастотных флюктуаций, обусловленных качкой. Аргумент максимального значения позволяет определить номер гармоники n и, как следствие, водоизмещение наблюдаемого надводного корабля.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ определения водоизмещения надводного корабля при его шумопеленговании, который может быть использован для судовых гидроакустических средств подводного наблюдения с целью увеличения состава информации о шумящих в море объектах. При этом обеспечивается возможность определения водоизмещения надводного корабля при любой заранее неизвестной ширине полосы низкочастотных флюктуаций его сигнала, обусловленных качкой на волнении поверхности моря.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Бородай И.К. и др. Прикладные задачи динамики судов на волнении. Л.: Судостроение, 1989.
2. Бородай И.К., Нецветаев Ю.А. Мореходность судов. Л.: Судостроение, 1982.
3. Кудрявцев А.А., Лугинец К.П., Машошин А.И. Об амплитудной модуляции подводного шумоизлучения гражданских судов // Акустический журнал. 2003. Том 49. №2 С. 224-228.
4. Бирюкова Е.С, Шенгелия М.В. Применение критерия Фишера проверки статистических гипотез в одной из задач классификации объектов // Материалы НТК МС ОАО «Концерн «Океанприбор». 2009. С. 163-164.
5. Афанасьев А.Н., Знаменская Т.К. Патент РФ №2546851 от 11.12.2013. Способ классификации гидроакустических сигналов шумоизлучения морского объекта. МПК G01S 3/80.
6. Машошин А.И. Оптимизация устройства обнаружения и измерения параметров амплитудной модуляции подводного шумоизлучения морских судов // Акустический журнал. 2013. Том 59. №3. С. 347-353.
7. Бендат Дж., Пирсол А. Измерение и анализ случайных процессов. М.: Мир, 1974.
8. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. / Пер. с англ. М.: Мир, 1978.
9. Харкевич А.А. Спектры и анализ. М.: Изд-во физмат. лит-ры, 1962.
10. Тейлор Дж. Введение в теорию ошибок. М.: Мир, 1985.
11. Сизов В.Г. Теория корабля: Учебн. пособ. /Одесск. национальн. морская акад. - Одесса: ФЕНЖС, 2003. 284 с.
12. Терминологический словарь-справочник по гидроакустике. / Р.Х. Бальян, Э.В. Батаногов, А.В. Богородский и др. - Л.: Судостроение, 1989. 368 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ шумопеленгования с определением водоизмещения надводного корабля | 2023 |
|
RU2805137C1 |
| Устройство определения водоизмещения надводного корабля при его шумопеленговании | 2018 |
|
RU2694270C1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2754602C1 |
| Способ определения характеристик аномалий морской поверхности, обусловленных процессами в приповерхностных слоях океана и атмосферы, по ее радиолокационным изображениям | 2023 |
|
RU2817178C1 |
| Способ определения класса шумящей цели | 2018 |
|
RU2685419C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ В ВИДЕ ЗВУКОРЯДА НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2011 |
|
RU2464588C1 |
Изобретение относится к области гидроакустики и предназначено для распознавания морских судов по их шумоизлучению. Для реализации способа осуществляют прием шумового сигнала гидроакустической антенной, аналого-цифровое преобразование, детектирование, низкочастотную фильтрацию, вычисление спектра сигнала в диапазоне частот флюктуаций, обусловленных качкой надводного корабля. Затем определяют тренд спектра, формируют центрированный спектр, определяют среднеквадратическое отклонение для центрированного спектра, формируют нормированный спектр. Формируют k частотных окон разной ширины со средними значениями на частоте каждой гармоники спектра n, формируют массив k×n значений средней мощности флюктуаций процесса в каждом из k×n частотных окон, выбирают наибольшее значение из массива k×n значений средней мощности флюктуаций процесса, запоминают его частоту по размерности n. Сравнивают наибольшее значение с порогом обнаружения и принимают решение о наличии/отсутствии низкочастотных флюктуаций, обусловленных качкой. Определяют водоизмещение надводного корабля по табличной зависимости водоизмещения от запомненной частоты n низкочастотной флюктуации сигнала. Техническим результатом изобретения является повышение помехоустойчивости способа и обеспечение возможности определения водоизмещения надводного корабля при любой заранее не известной ширине полосы низкочастотных флюктуаций его сигнала, обусловленных качкой на морском волнении. 2 ил.
Способ определения водоизмещения надводного корабля при его шумопеленговании, который содержит прием шумового сигнала гидроакустической антенной, аналого-цифровое преобразование, детектирование, низкочастотную фильтрацию, вычисление спектра плотности мощности в диапазоне частот флюктуаций, обусловленных качкой надводного корабля, отличающийся тем, что определяют тренд спектра, формируют центрированный спектр как разность между спектром и его трендом на частоте каждой гармоники n, определяют среднеквадратическое отклонение для центрированного спектра, формируют нормированный спектр как отношение между центрированным спектром и его среднеквадратическим отклонением на частоте каждой гармоники n, формируют k частотных окон различной ширины, в совокупности перекрывающих диапазон ширин частот качки, со средними значениями на частоте каждой гармоники спектра n, формируют массив k×n значений средней мощности флюктуаций процесса в каждом из k×n частотных окон как сумму амплитуд гармоник, входящих в частотное окно, поделенную на ширину окна, выбирают наибольшее значение из массива k×n значений средней мощности флюктуаций процесса, запоминают его частоту, сравнивают наибольшее значение с порогом обнаружения и принимают решение о наличии/отсутствии низкочастотных флюктуаций, обусловленных качкой, определяют водоизмещение надводного корабля по табличной зависимости водоизмещения от запомненной частоты низкочастотной флюктуации сигнала.
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| СПОСОБ КЛАССИФИКАЦИИ ШУМЯЩИХ ОБЪЕКТОВ | 2003 |
|
RU2262121C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ | 1995 |
|
RU2110810C1 |
| К.Н | |||
| Чайников | |||
| Общее устройство судов | |||
| Л.: Судостроение, 1971 | |||
| US 5886661 A1, 23.03.1999. | |||

