Предлагаемый способ управления относится к области управления движением воздушных судов, в частности к области управления полета ракет нормальной аэродинамической схемы с Х-образно расположенными рулями.
Известен способ управления скоростью воздушного судна (ВС) отклонением тормозных щитков [Ништ М.И. Аэродинамика боевых летательных аппаратов / М.И. Ништ - М.: ВВИА имени профессора Н.Е. Жуковского, 1994 г., С.258] - поверхностями управления, которые отклоняют для снижения его воздушной скорости. При превышении путевой скорости ВС выше заданной скорости на величину ΔV, тормозные щитки отклоняют на угол ΔδТЩ пропорциональный величине этого рассогласования скорости ΔV. Воздушный поток оказывают тормозящее воздействие на данные отклоненные управляющие поверхности и снижает воздушную скорость всего воздушного судна. В целом, указанные управляющие поверхности обеспечивают снижение продольной скорости самолета, но не все ВС имеют данные управляющие поверхности. Для управления скоростью воздушного судна при их отсутствии необходим монтаж дополнительных приводов и вычислительных устройств, обеспечивающих их работу.
Известен способ автоматического управления скоростью воздушного судна путем изменения тяги двигателя. При отклонении путевой скорости ВС от скорости заданной системой управления ВС на величину ΔV но сигналам данной системы управления тяга двигателя изменяется на величину ΔP определяемую пропорционально величине рассогласования скорости ΔV. В результате изменения тяги двигателя ВС возникает ускорение, направленное на изменение скорости ВС в сторону уменьшения этого рассогласования [Красовский А.Л. Системы автоматического управления летательных аппаратов / А.А. Красовский, Ю.А. Вавилов, А.И. Сучков. - М.: Наука, 1986 г., С.309-315]. Управление скоростью ВС путем изменения тяги двигателя требует изменения его конструкции двигателя, удорожания конструкции, увеличения веса ВС.
Известен способ управления движением ракет при помощи X-образно расположенных дифференциально отклоняемых аэродинамических рулей [Лебедев А.А. Динамика полета беспилотных летательных аппаратов/ Лебедев А.А., Чернобровкин Л.C./ Учебное пособие для вузов. Изд. 2-е, перераб. и доп. М:. Машиностроение, 1973, 616 с.]. После пуска ракеты для наведения ракеты на подвижную цель при отклонении ракеты от линии визирования «ракета-цель» с целью его устранения системой наведения ракеты формируются сигналы на рулевые привода для отклонения X-образно расположенных аэродинамических рулевых поверхностей следующим образом. Первоначально формируют три сигнала по каналам управления путем:
- измерения текущего значения угла наклона траектории θ, определении необходимого для наведения на цель ракеты значения угла наклона траектории θзад, определении сигнала рассогласования по углу наклона траектории Δθзад, и путем усиления этого сигнала на коэффициент 

- измерения текущего значения угла пути ψ, определения заданное, необходимое для наведения на цель ракеты значение угла пути ψзад, определении сигнала рассогласования по углу пути Δψзад, от заданного значения и, усиливая этот сигнал, формируют сигнал скорости отклонения рулей по каналу направления 
- определения текущего значения угла крена γ, определяют заданное, необходимое для наведения на цель ракеты значение угла крена γзад, определении сигнала рассогласования по углу крена Δγзад, от заданного значения и, усиливая сигнал на коэффициент управления 





- сигнал канала высоты δВ, синхронно вверх - при отрицательных рассогласованиях по углу наклона траектории Δθзад и синхронно вниз - при положительных рассогласованиях по углу наклона траектории Δθзад;
- сигнал канала направления δН, при положительных рассогласованиях угла пути Δψзад - синхронно влево и при отрицательных рассогласованиях угла пути Δψзад - синхронно вправо;
- сигнал канала элеронов δЭ, синхронно в направлении совпадающем с направлением рассогласования по крену Δγзад, после чего приводят все сигналы 




Рассмотренный последним способ управления движением ракеты является наиболее близким, по совокупности существенных признаков к заявленному и принимается за прототип заявленного способа управления продольной скоростью ракеты.
Задачей, на решение которой направлен заявленный способ управления полета ракеты, является определение таких отклонений ее X-образно расположенных рулей, с помощью которых возможно управление скоростью ракеты, но которые не повлияют на движение ракеты по каналам высоты, направления и элеронов.
Технический результат, который обеспечивается заявленным способом управления полетом ракеты, заключается в том, что при синхронном отклонении рулей в данной комбинации оказывается эффективное управляющее воздействие на значение продольной скорости ракеты и не наблюдается изменения перемещения ракеты и изменения ее углового положения по каналам высоты, направления и элеронов.
Указанный технический результат способа управления воздушной скоростью ракеты обеспечивается тем, что, при увеличении воздушной скорости воздушного судна выше заданной вычислителем системы управления все рулевые поверхности синхронно отклоняются на увеличение угла своего отклонения пропорционально величине рассогласования воздушной скорости.
Сущность заявленного способа заключается в том, что отклонение любой рулевой поверхности в сторону увеличения угла отклонения навстречу воздушному потоку т.е. на увеличение ее угла атаки приводит к пропорциональному увеличению силы лобового сопротивления.
Кроме того в результате синхронного отклонения попарно навстречу друг к другу верхних и нижних рулей в поперечной плоскости ракеты происходит по парная компенсация моментов рулей, что приводит к тому, что практически не оказывается влияние на управление в каналах высоты, направления и элеронов, но значительно увеличивается сила лобового сопротивления.
Аналогичный эффект наблюдается в результате синхронного отклонения при отклонении из нулевого положения рулей в обратном направлении - попарно навстречу друг к другу правых и левых рулей.
Возникшее увеличение силы лобового сопротивления на всех X-образных рулях приводит к увеличению силы лобового сопротивления всего воздушного судна в целом - уменьшается воздушная скорость ракеты. Эффективность такого управления достаточно высока - отклонение всех X-образно расположенных рулей в описанной комбинации существующих ракет на 30° приводит к увеличению силы лобового сопротивления до 30%.
В целом, при появлении рассогласования по любому из каналов управления система управления формирует сигнал отклонения рулей направленный на устранение этого рассогласования.
Таким для управление полетом ракеты четырьмя Х-образно расположенными рулями по сигналам четырех сигналов управления по каждому каналу выделяется свой ограниченный диапазон отклонения рулей. Это организуется путем ограничения сигналов по каждому из каналов управления. Например, при полном отклонении рулей в 40 градусов сигнал по каждому из четырех каналов не должен превысить отклонение руля в 10 градусов.
Таким образом, максимальное суммарное отклонение рулей по каналам в одном направлении приведет к выходу одного из рулей в крайнюю точку отклонения, ограниченную упором. При таком выходе на упор подача сигналов прекратится, поскольку будут выбраны диапазоны отклонения рулей по всем каналам управления.
В целом, скорость движения рулей для каждого из каналов задается пропорциональной величине рассогласования по данному каналу, что обеспечивается наличием обратной связи для данного канала.
Однако в некоторых случаях синхронные отклонение рулей в заявленной комбинации рулей друг другу навстречу может оказывать влияние на изменение перемещений ракеты в других каналах управления ракетой. Это происходит в следующих условиях:
- при значительных углах атаки в комбинации, когда соседние рули сверху и снизу попарно синхронно отклоняются навстречу друг другу.
- при значительных углах скольжения в комбинации, когда соседние рули с одной стороны попарно синхронно отклоняются навстречу друг другу.
Поэтому в случае превышения значения угла атаки α над значением угла скольжения β лучше использовать комбинацию отклонения соседних рулей с каждой стороны синхронно попарно навстречу друг другу; а в случае превышения значения угла скольжения β над значением угла атаки α лучше использовать комбинацию отклонения рулей сверху и рулей снизу попарно синхронно навстречу друг другу,
При отрицательном рассогласовании воздушной скорости Vа зад рули уже отклонены на торможение ракеты по сигналу в канале 

Область применения заявленного способа управления на высоте до 13000 метров в условиях достаточной плотности воздуха для аэродинамического управления движением ракеты.
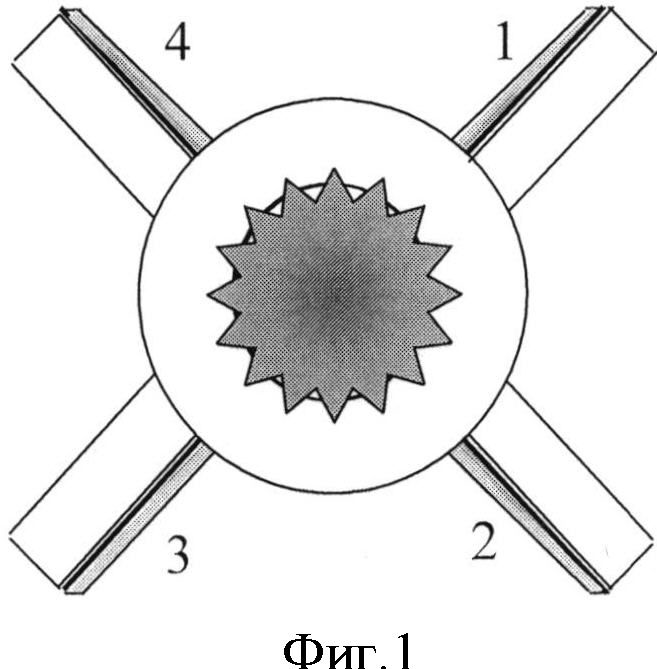
На фигуре 1 изображен вид на отклоненные рулевые поверхности с хвоста ракеты при угле атаки α, большем угла скольжения β. На фигуре 1 цифрами 1, 2, 3, 4 обозначены номера рулей. На фигуре показано, что для уменьшения продольной скорости ракеты рули попарно с одной стороны отклоняются навстречу друг другу (1 навстречу 2 и 3 навстречу 4).
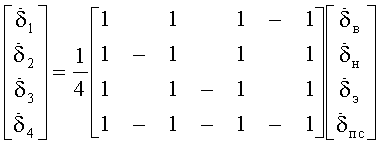
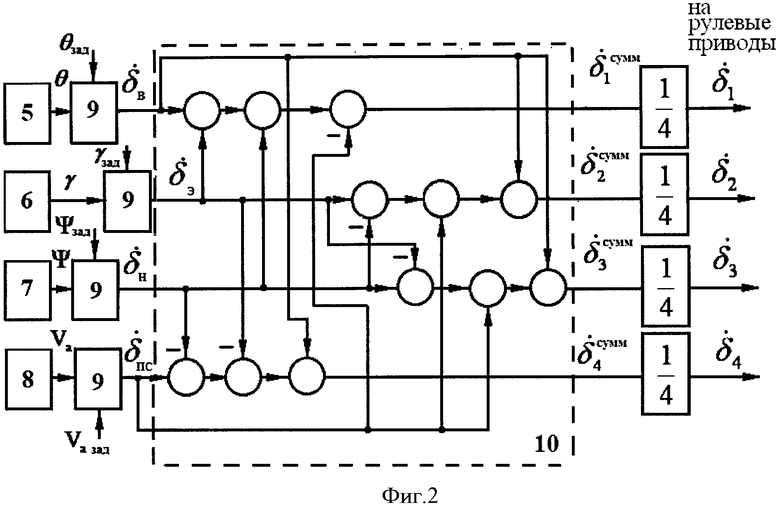
На фигуре 2 изображена функциональная схема системы управления ракеты нормальной аэродинамической схемы с X-образно расположенными рулями при угле атаки α, большем угла скольжения β при принятии за положительные отклонения четырех рулей ракеты δ1, δ2, δ3, δ4 - отклонение вверх. На фигуре 2: 5 - вычислитель текущего угла наклона траектории θ, 6 - измеритель угла крена γ, 7 - вычислитель текущего угла пути ψ, 8 -измеритель воздушной скорости Vа, 9 - сумматор обратной связи с усилителем рассогласования, 10 - блок суммирования и формирования знаков сигналов управления 







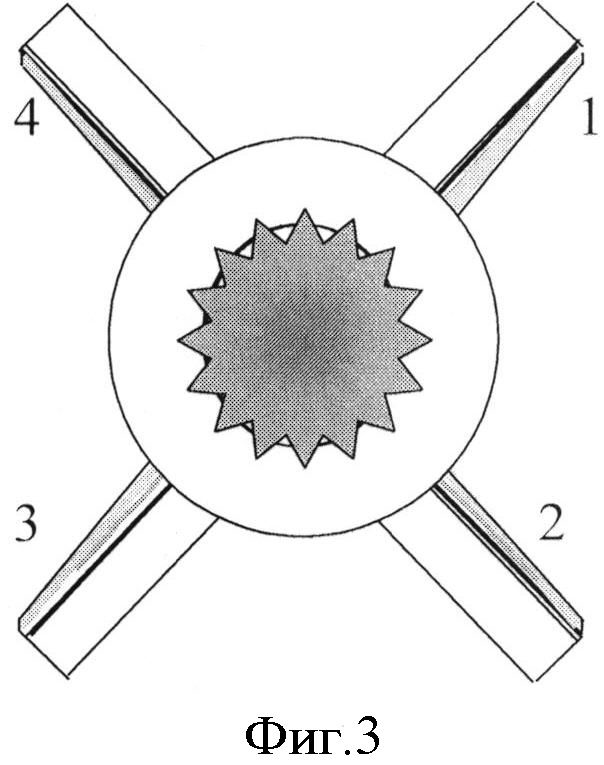
На фигуре 3 изображен вид на отклоненные рулевые поверхности с хвоста ракеты при угле скольжения β большем угла атаки α. На фигуре 3 цифрами 1, 2, 3, 4 обозначены номера рулей. Предложенный способ управления ракетой состоит в том, что для уменьшения продольной скорости ракеты рули попарно отклоняются попарно сверху и снизу (1 навстречу 4 и 2 навстречу 3).
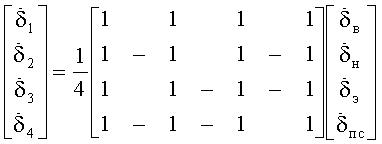
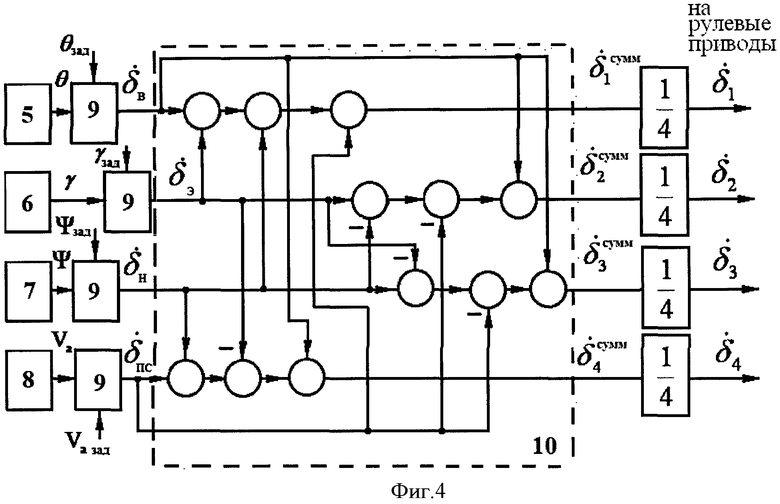
На фигуре 4 изображена функциональная схема структурная схема системы управления ракеты нормальной аэродинамической схемы с X-образно расположенными рулями при угле скольжения β большем угла атаки α при принятии за положительные отклонения четырех рулей ракеты δ1, δ2, δ3, δ4 - отклонение вверх. На фигуре 4: 5 - вычислитель текущего угла наклона траектории θ, 6 - измеритель угла крена γ, 7 - вычислитель текущего угла пути ψ, 8 - измеритель воздушной скорости Vа, 9 - сумматор обратной связи с усилителем рассогласования, 10 - блок суммирования и формирования знаков сигналов управления 







| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2493053C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| АВТОПИЛОТ ДЛЯ СИММЕТРИЧНОЙ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2302358C1 |
| РАКЕТА | 2005 |
|
RU2272984C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
Изобретение относится к области авиации и ракетостроения, в частности к системам стабилизации полета. Способ управления заключается в измерении текущих значений углов наклона траектории θ, пути ψ, крена γ, определении необходимых для наведения на цель ракеты значений углов наклона траектории θзад, пути ψзад, крена γзад, определении сигналов рассогласований по углам наклона траектории Δθзад, пути Δψзад, крена Δγзад от заданных значений и формировании сигналов скорости отклонения рулей по каналу высоты 














Способ управления скоростью полета ракеты нормальной аэродинамической схемы с X-образно расположенными рулями, заключающийся в определении текущих значений углов наклона траектории θ, пути ψ, крена γ, определении необходимых для наведения на цель ракеты значений углов наклона траектории θзад, пути ψзад, крена γзад, определении сигналов рассогласований по углам наклона траектории Δθзад, пути Δψзад, крена Δγзад от заданных значений, по данным рассогласованиям формируют сигналы скорости отклонения рулей по каналу высоты 











- при угле атаки, большем угла скольжения, - синхронное перемещение соседних рулей с левой и с правой стороны попарно-синхронно навстречу друг другу;
- при угле атаки, меньшем угла скольжения, - синхронное перемещение верхних рулей и нижних рулей попарно-синхронно навстречу друг другу, в результате чего отклонение рулей приводит к заданным управляющим воздействиям на воздушную скорость движения ракеты Va.
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2280589C2 |
| ХВОСТОВОЙ ОТСЕК ВОЗДУШНО-ДИНАМИЧЕСКИХ РУЛЕВЫХ ПРИВОДОВ ДЛЯ УПРАВЛЯЕМЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ПРЕИМУЩЕСТВЕННО ДЛЯ УПРАВЛЯЕМЫХ АВИАЦИОННЫХ БОМБ) И ПНЕВМОДВИГАТЕЛЬ РУЛЕВОГО ПРИВОДА | 2009 |
|
RU2418261C2 |
| КОРРЕКТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1992 |
|
RU2014559C1 |
| КОРРЕКТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ, СТАБИЛИЗИРОВАННЫЙ ПО КРЕНУ, С ЛАЗЕРНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 1993 |
|
RU2044255C1 |
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |

