Изобретение относится к управлению летательными аппаратами, в частности к автопилотам зенитных управляемых ракет (ЗУР), и может быть использовано в ЗУР, имеющих симметричную аэродинамическую компоновку.
Автопилот, осуществляющий управление поперечными перегрузками и стабилизацию угловых движений ракеты с крестообразным расположением крыльев, в общем случае имеет три канала управления - канал управления движением тангажа, канал управления движением рысканья и канал управления движением крена, причем обычно каналы тангажа и курса (далее - каналы поперечного управления) имеют одинаковую структуру. В частности, канал поперечного управления (КПУ) содержит последовательно включенные формирователь сигнала ошибки по поперечному ускорению и формирователь сигнала управления приводом пары рулей, находящихся в одной плоскости, при этом формирователь сигнала ошибки содержит первый сумматор, первый вход которого, являясь входом канала, подключен к соответствующему выходу бортовой системы управления ракетой, а второй вход соединен с выходом датчика поперечной перегрузки ракеты, формирователь сигнала управления приводом рулей содержит второй сумматор, первый вход которого соединен с выходом первого сумматора, а второй вход - с выходом датчика угловой скорости ракеты. Канал управления углом крена (КУК) содержит последовательно включенные формирователь сигнала ошибки по крену и формирователь сигнала управления приводом элеронов ракеты, причем формирователь сигнала ошибки содержит третий сумматор, первый вход которого, являясь входом канала, подключен к соответствующему выходу бортовой системы управления ракетой, а второй вход соединен с выходом датчика угла крена ракеты, формирователь сигнала управления приводом элеронов содержит четвертый сумматор, первый вход которого соединен с выходом третьего сумматора, а второй вход - с выходом второго датчика угловой скорости ракеты [1].
Причина, препятствующая достижению указанного ниже технического результата при использовании известного автопилота, заключается в следующем. Симметричной ЗУР с крестообразным расположением рулей свойственна взаимосвязь движения по крену с поперечными движениями, причем определяющее влияние на такую взаимосвязь оказывает момент крена от косого обдува рулей при возникновении углов атаки. Известный автопилот формирует автономные сигналы управления движением крена и движением в двух взаимно перпендикулярных поперечных плоскостях расположения пар аэродинамических рулей, при этом движение ракеты в одной из указанных плоскостей не зависит от управляющих воздействий в другой плоскости, а движение относительно продольной оси не связано с управляющими воздействиями в поперечных плоскостях. Поэтому, в результате отсутствия в системе управления элеронами информации о параметрах поперечного движения, при выполнении резких маневров ЗУР в районе точки встречи с целью возникают значительные по величине моменты косого обдува рулей, вызывающие большие амплитудные выбросы угла крена, что снижает точность управления ЗУР, а в отдельных случаях приводит к нарушению устойчивости системы стабилизации угловых движений ракеты.
Задачей изобретения является улучшение динамических характеристик системы стабилизации угловых движений ЗУР при отработке значительных по величине знакопеременных команд управления по перегрузке за счет формирования дополнительной взаимосвязи между каналами автопилота, компенсирующей естественную аэродинамическую взаимосвязь между ними. Технический результат, достигаемый при осуществлении изобретения, выражается в повышении точности управления ЗУР.
Это достигается тем, что в известный автопилот симметричной ЗУР, включающий в себя первый и второй идентичные каналы поперечного управления, каждый из которых содержит последовательно включенные формирователь сигнала ошибки по поперечному ускорению и формирователь сигнала управления приводом пары рулей, находящихся в одной плоскости, причем формирователь сигнала ошибки по поперечному ускорению выполнен в виде первого сумматора, первый вход которого, являясь входом канала, подключен к соответствующему выходу бортовой системы управления ракетой, второй вход соединен с первым выходом датчика поперечной перегрузки ракеты в данной плоскости, а выход через согласующие элементы соединен с входом формирователя сигнала управления приводом пары рулей, и канал управления углом крена, содержащий последовательно включенные формирователь сигнала ошибки по крену и формирователь сигнала управления приводом всех рулей ракеты, причем формирователь сигнала ошибки по крену выполнен в виде третьего сумматора, первый вход которого, являясь входом канала, подключен к соответствующему выходу бортовой системы управления ракетой, второй вход соединен с выходом датчика угла крена ракеты, а выход через согласующие элементы соединен с входом формирователя сигнала управления приводом всех рулей ракеты, в соответствии с изобретением введены блок компенсации аэродинамической взаимосвязи каналов автопилота и формирователь сигналов управления рулями, причем блок компенсации аэродинамической взаимосвязи каналов автопилота содержит последовательно включенные первый усилитель, первый инвертор и первый коммутатор, последовательно включенные второй усилитель, второй инвертор и второй коммутатор, последовательно включенные первый усилитель-сумматор, ограничитель, третий инвертор и четвертый сумматор, а также формирователь сигналов управления коммутаторами, устройство выделения модуля и знака, формирователь условий переключения, схему обратной связи, при этом вход первого усилителя соединен со вторым выходом датчика поперечной перегрузки первого канала поперечного управления, вход второго усилителя соединен со вторым выходом датчика поперечной перегрузки второго канала поперечного управления, выходы первого и второго усилителей также соединены с вторыми входами соответственно первого и второго коммутаторов, первым и вторым входами устройства выделения модуля и знака, третий и четвертый входы которого соединены также с выходами соответственно второго и первого инверторов; первый и второй выходы устройства выделения модуля и знака соединены с первым и вторым входами формирователя сигналов управления коммутаторами, а третий и четвертый выходы - с первым и вторым входами формирователя условий переключения, первый и второй выходы которого соединены соответственно с четвертым и третьим входами формирователя сигналов управления коммутаторами, первый и второй, третий и четвертый выходы которого соединены с третьими и четвертыми входами соответственно первого и второго коммутаторов, выходы которых объединены и соединены с входом первого усилителя-сумматора, выход которого подключен также к первому входу схемы обратной связи, выход которой соединен с входом первого усилителя-сумматора, а второй вход подключен к внешнему источнику сигналов коррекции; второй вход четвертого сумматора соединен с выходом формирователя сигнала управления приводом элеронов ракеты канала управления углом крена, а выход четвертого сумматора - с третьим входом формирователя сигналов управления рулями, первый и второй входы которого соединены с выходами формирователей сигнала управления приводом пары рулей соответственно первого и второго каналов поперечного управления.
Формирователь сигналов управления рулями содержит четвертый и пятый инверторы, последовательно включенные второй усилитель-сумматор и первый усилитель мощности, выход которого связан с рулевой машиной первого руля; последовательно включенные третий усилитель-сумматор и второй усилитель мощности, выход которого связан с рулевой машиной третьего руля; последовательно включенные четвертый усилитель-сумматор и третий усилитель мощности, выход которого связан с рулевой машиной второго руля; последовательно включенные пятый усилитель-сумматор и четвертый усилитель мощности, выход которого связан с рулевой машиной четвертого руля; при этом первые входы второго и третьего усилителей-сумматоров объединены и, являясь первым входом блока, подключены к выходу формирователя сигнала управления приводом пары рулей первого канал поперечного управления; первые входы четвертого и пятого усилителей-сумматоров объединены и, являясь вторым входом блока, подключены к выходу формирователя сигнала управления приводом пары рулей второго канала поперечного управления; вторые входы третьего и четвертого усилителей-сумматоров объединены и, являясь третьим входом блока, подключены к выходу четвертого сумматора в канале управления углом крена, к которому через четвертый инвертор подключен также второй вход второго усилителя-сумматора, а через третий инвертор - второй вход пятого усилителя-сумматора.
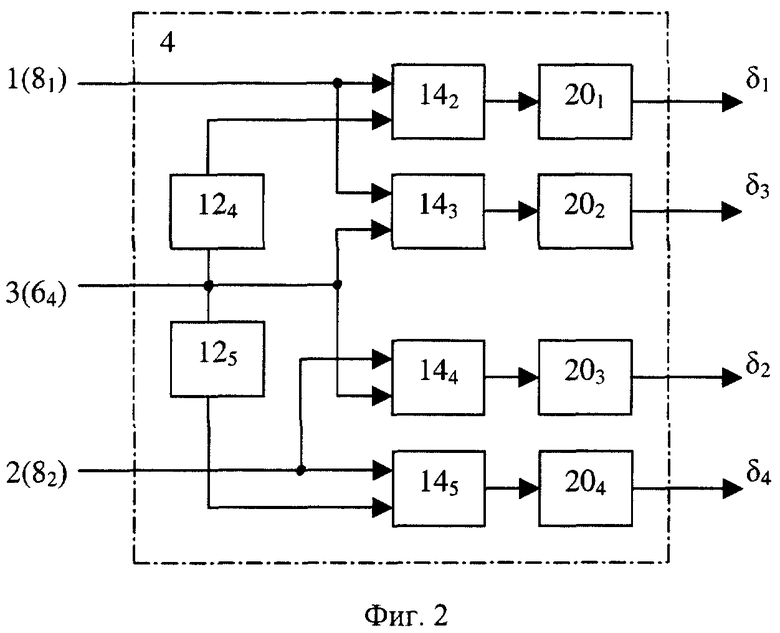
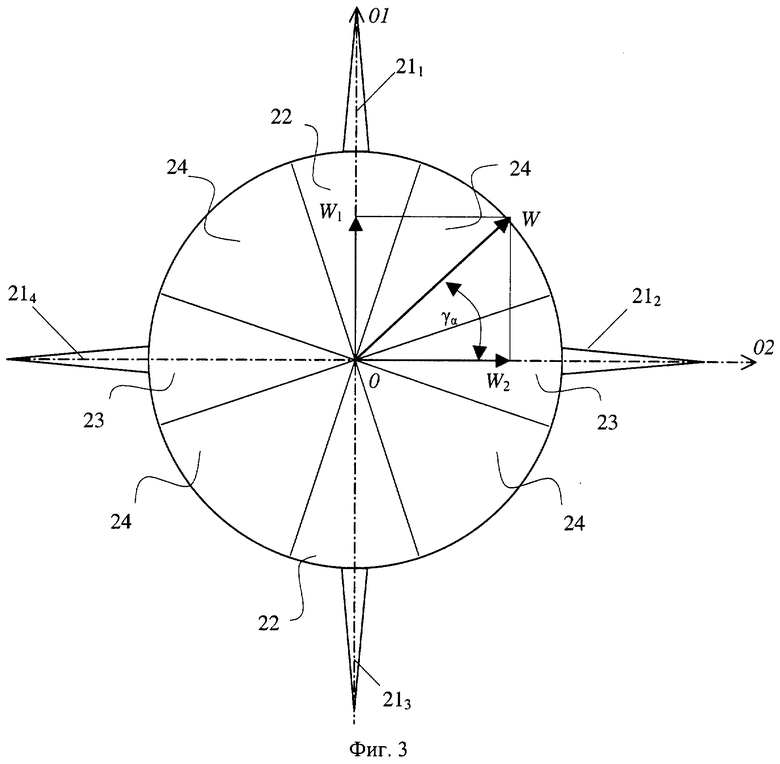
Изобретение поясняется графическими материалами, на которых представлены: фиг.1 - структурная схема автопилота для симметричной ЗУР; фиг.2 - структурная схема формирователя сигналов управления рулями; фиг.3 - взаимное положение поперечных осей симметричной ракеты и ее рулей.
Автопилот для симметричной ЗУР (фиг.1) включает в себя первый 1 и второй 2 идентичные по структуре каналы поперечного управления (КПУ), канал управления углом крена (КУК) 3, формирователь сигналов управления рулями (ФСУ) 4 и блок компенсации аэродинамической взаимосвязи каналов (БКАВ) 5. Каждый КПУ содержит последовательно включенные формирователь сигнала ошибки по поперечному ускорению и формирователь сигнала управления приводом пары рулей, находящихся в одной плоскости. Формирователь сигнала ошибки по поперечному ускорению выполнен в виде первого сумматора 6 (61 в первом КПУ и, соответственно, 62 во втором КПУ), первый вход которого, являясь входом КПУ (соответственно K1, K2), подключен к соответствующему выходу бортовой системы управления поперечной перегрузкой ракеты (на схеме не показана). Второй вход сумматора 61 (62) соединен с первым выходом датчика 71 (72) поперечной перегрузки ракеты в соответствующей плоскости, а выход через согласующие элементы (на схеме не показаны) соединен с входом формирователя 81 (82) сигнала управления приводом пары рулей. В качестве последнего может быть использована типовая схема с сумматором, датчиком угловой скорости и согласующими элементами [1]. Выходы формирователей 81, 82 сигнала управления приводом пары рулей первого 1 и второго 2 КПУ соединены соответственно с первым и вторым входами ФСУ 4. Канал управления углом крена (КУК) 3 содержит формирователь сигнала ошибки по крену, выполненный в виде третьего сумматора 63, первый вход которого, являясь входом канала К3, подключен к соответствующему выходу бортовой системы управления креном ракеты, второй вход соединен с выходом датчика 9 угла крена ракеты. Через согласующие элементы (на схеме не показаны) выход третьего сумматора 63 соединен с входом формирователя 10 сигнала управления приводом элеронов ракеты, который может быть выполнен в виде сумматора с датчиком угловой скорости и согласующими элементами. Его выход через четвертый сумматор 64 подключен к третьему входу ФСУ 4.
Блок компенсации аэродинамической взаимосвязи каналов автопилота (БКАВ) 5 содержит последовательно включенные первый усилитель 111, первый инвертор 121 и первый коммутатор 131; последовательно включенные второй усилитель 112, второй инвертор 122 и второй коммутатор 132; последовательно включенные первый усилитель-сумматор 141, ограничитель 15, третий инвертор 123; схему обратной связи 16, устройство выделения модуля и знака 17, формирователь условий переключения 18 и формирователь сигналов управления коммутаторами 19. Вход первого усилителя 111 соединен со вторым выходом датчика 71 поперечной перегрузки первого КПУ 1, вход второго усилителя 112 соединен со вторым выходом датчика 72 поперечной перегрузки второго КПУ 2. Выходы первого 111 и второго 112 усилителей соединены также соответственно со вторыми входами первого 131 и второго 132 коммутаторов, третьим и первым входами устройства выделения модуля и знака 17, второй и четвертый входы которого соединены также с выходами соответственно второго 132 и первого 131 инверторов. Первый и второй выходы устройства выделения модуля и знака 17 соединены соответственно с первым и вторым входами формирователя условий переключения 18, а третий и четвертый выходы - соответственно с первым и вторым входами формирователя сигналов управления коммутаторами 19, третий и четвертый входы которого соединены с первым и вторым выходами формирователя условий переключения 18. Первый и второй, третий и четвертый выходы формирователя сигналов управления коммутаторами 19 соединены с третьими и четвертыми входами соответственно первого 131 и второго 132 коммутаторов. Их выходы объединены и соединены с входом первого усилителя-сумматора 141, выход которого подключен также к первому входу схемы обратной связи 16, выход которой соединен с входом первого усилителя-сумматора 141, а второй вход К4 подключен к внешнему источнику сигналов коррекции. Второй вход четвертого сумматора 64 соединен с выходом формирователя 10 сигнала управления приводом элеронов ракеты в КУК 3, а выход - с третьим входом ФСУ 4, первый и второй входы которого соединены с выходами формирователей 81, 82 сигналов управления приводами пар рулей соответственно первого 1 и второго 2 ПКУ.
Формирователь сигналов управления рулями (ФСУ) 4 (фиг.2) содержит четвертый 124 и пятый 125 инверторы; последовательно включенные второй усилитель-сумматор 142 и первый усилитель мощности 201, выход которого связан с рулевой машиной первого руля (δ1); последовательно включенные третий усилитель-сумматор 143 и второй усилитель мощности 202, выход которого связан с рулевой машиной третьего руля (δ3); последовательно включенные четвертый усилитель-сумматор 144 и третий усилитель мощности 203, выход которого связан с рулевой машиной второго руля (δ2); последовательно включенные пятый усилитель-сумматор 145 и четвертый усилитель мощности 204, выход которого связан с рулевой машиной четвертого руля (δ4). Первые входы второго 142 и третьего 143 усилителей-сумматоров объединены и, являясь первым входом блока, подключены к выходу формирователя 81 сигнала управления приводом пары рулей первого КПУ. Первые входы четвертого 144 и пятого 145 усилителей-сумматоров объединены и, являясь вторым входом блока, подключены к выходу формирователя 82 сигнала управления приводом пары рулей второго КПУ. Вторые входы третьего 143 и четвертого 144 усилителей-сумматоров объединены и, являясь третьим входом блока, подключены к выходу четвертого сумматора 64 в канале управления утлом крена 3. К нему же через четвертый инвертор 124 подключен также второй вход второго усилителя-сумматора 142 и через пятый инвертор 125 - второй вход пятого усилителя-сумматора 145.
Блоки и элементы автопилота выполнены по известным правилам на типовых устройствах цифровой вычислительной техники [2].
Заявленный трехканальный автопилот для симметричной ЗУР работает следующим образом. В процессе управляемого полета ЗУР одновременно на входы первых сумматоров 61, 62 соответственно первого 1 и второго 2 КПУ подаются команды K1, К2 управления ракетой в поперечных плоскостях, совпадающих с плоскостями расположения пар аэродинамических рулей, а на первый вход третьего сумматора 63 в КУК 3 - команда К3 управления креном ракеты для обеспечения оптимальной траектории ее полета в точку встречи с целью. При этом в поперечных плоскостях 01, 02 (фиг.3) возникают соответствующие поперечные перегрузки W1, W2, величины которых измеряются датчиками 71, 72 и определяются выражениями [3]:
W1=V·a4·α1; W2=V·a4·α2,
где V - скорость полета ракеты;
a4 - коэффициент подъемной силы ракеты;
α1, α2 - углы атаки в поперечных плоскостях.
С выхода датчика 71 сигнал, пропорциональный поперечному ускорению, подается в первый сумматор 61 первого КПУ, на выходе которого формируется сигнал ошибки ΔW1=K1-W1, на основе которого в формирователе 81 первого ПКУ формируется сигнал управления σ1 в данной плоскости, который подается на первый вход формирователя сигналов управления рулями (ФСУ) 4 для отклонения рулей 211, 213 в плоскости 01 (фиг.3) на углы δ1, δ3 соответственно. Аналогично на выходе первого сумматора 62 формируется сигнал ошибки ΔW2=К2-W2, на основе которого в формирователе 82 второго ПКУ формируется сигнал управления σ2 в другой плоскости, который подается на второй вход ФСУ 4 для отклонения рулей 212, 214 в плоскости 02 соответственно на углы δ2, δ4. На выходе третьего сумматора 63 КУК 3 формируется сигнал ошибки Δγ=К2-γ, где γ - угол крена ракеты, измеряемый датчиком 9. На его основе в формирователе 10 КУК 3 формируется сигнал управления σ3, который через четвертый сумматор 64 подается на третий вход ФСУ 4 для управления всеми рулями 211-214 в качестве элеронов.
ФСУ 4 работает следующим образом (фиг.2). На первые входы второго 142 и третьего 143 усилителей-сумматоров поступает сигнал управления σ1 с выхода первого КПУ, а на их вторые входы - сигнал управления σ3 с выхода КУК 3, причем на второй усилитель-сумматор 142 этот сигнал подается в инвертированном виде. Выходные сигналы второго 142 и третьего 143 усилителей-сумматоров затем усиливаются соответственно первым 201 и вторым 202 усилителями мощности и подаются на рулевые машины соответственно первого 211 и третьего 213 рулей ракеты. При этом реализуется отклонение эквивалентного руля  управления поперечной перегрузкой в плоскости 01 (фиг.3). Аналогично, на первые входы четвертого 144 и пятого 145 усилителей-сумматоров поступает сигнал управления σ2 с выхода второго КПУ, а на их вторые входы - сигнал управления σ3 с выхода КУК 3, причем на пятый усилитель-сумматор 145 этот сигнал подается в инвертированном виде. Выходные сигналы четвертого 144 и пятого 145 усилителей-сумматоров затем усиливаются соответственно третьим 203 и четвертым 204 усилителями мощности и подаются на рулевые машины соответственно второго 212 и четвертого 214 рулей ракеты. При этом реализуется отклонение эквивалентного руля
управления поперечной перегрузкой в плоскости 01 (фиг.3). Аналогично, на первые входы четвертого 144 и пятого 145 усилителей-сумматоров поступает сигнал управления σ2 с выхода второго КПУ, а на их вторые входы - сигнал управления σ3 с выхода КУК 3, причем на пятый усилитель-сумматор 145 этот сигнал подается в инвертированном виде. Выходные сигналы четвертого 144 и пятого 145 усилителей-сумматоров затем усиливаются соответственно третьим 203 и четвертым 204 усилителями мощности и подаются на рулевые машины соответственно второго 212 и четвертого 214 рулей ракеты. При этом реализуется отклонение эквивалентного руля  управления поперечной перегрузкой в плоскости 02.
управления поперечной перегрузкой в плоскости 02.
При этом движение ракеты по крену определяется эквивалентным элероном:
а в результате косого обдува рулей ракеты появляется момент крена, действующий относительно ее продольной оси. Коэффициент момента косого обдува определяется выражением [3]:

где αк - угол атаки корпуса ракеты;
М - число Маха;
γα - угол ориентации вектора скорости ракеты.
Если не компенсировать этот момент, то возникает вредное взаимовлияние между движением ракеты в поперечных плоскостях и по крену, приводящее к значительным выбросам угла крена по амплитуде и колебательности переходных процессов по поперечным ускорениям, что может нарушить устойчивость системы стабилизации в целом.
Известный способ компенсации аэродинамической взаимосвязи между движением ракеты в поперечных плоскостях и по крену основан на формировании дополнительного сигнала, пропорционального моменту крена от косого обдува, и вычитании его из сигнала управления σ3 приводами ракеты по крену [3]. Принцип формирования сигнала компенсации σком взаимосвязи заключается в следующем. Учитывая, что положение суммарного вектора перегрузки W (фиг.3) относительно поперечных осей ракеты 01, 02 в процессе полета может быть произвольным, а момент косого обдува определяется знакопеременной функцией sin4γα, в поперечной плоскости выделяются три области:
область 22 при |W2|≥k·|W1|;
область 23 при |W1|≥k·|W2|;
область 24 при |W1|<k·|W2| или |W2|<k·|W1|, k<1,
где k - константа, выбираемая при проектировании и формировании системы стабилизации.
Сигнал компенсации взаимосвязи для области 22 формируется путем замены выражения sin4γα на выражение 4α1/αк·signW2, а для области 23 - выражением 4α2/αк·signW1. Выражение для момента косой обдувки принимает вид:

где Ck - коэффициент линейной интерполяции f(αk, М) по М;
f(Δ) - функция коррекции коэффициента усиления аппаратурной взаимосвязи;
Δ - аргумент коррекции (скоростной напор, продольное ускорение ракеты и т.д.);

Для области 24 сигнал компенсации взаимосвязи имеет вид:

Согласно приведенным выражениям, искомый сигнал компенсации σком взаимосвязи выбирают из трех указанных сигналов управления в зависимости от ориентации поперечных осей ракеты относительно плоскости, проходящей через вектор ее суммарного поперечного ускорения и продольную ось. В заявленном автопилоте это производится в БКАВ 5 (фиг.1), который работает следующим образом.
Аналоговый сигнал, пропорциональный поперечной перегрузке W1 со второго выхода датчика 71 первого ПКУ, через первый вход блока поступает на вход первого усилителя 111, а аналоговый сигнал, пропорциональный поперечной перегрузке W2 со второго выхода датчика 72 второго ПКУ, через второй вход блока поступает на вход второго усилителя 112. С выхода первого усилителя 111 усиленный сигнал подается на первый вход устройства выделения модуля и знака 17, второй вход первого коммутатора 131 и вход первого инвертора 121, с выхода которого сигнал поступает также на второй вход устройства выделения модуля и знака 17. С выхода второго усилителя 112 усиленный сигнал подается на третий вход устройства выделения модуля и знака 17, второй вход второго коммутатора 132 и вход второго инвертора 122, с выхода которого сигнал поступает также на четвертый вход устройства выделения модуля и знака 17. В устройстве осуществляется выделение модулей перегрузок |W1|, |W2| и знаков функций signW1, signW2. Аналоговые сигналы, пропорциональные модулям |W1|, |W2|, соответственно с первого и второго выходов устройства 17 поступают на первый и второй входы формирователя условий переключения 18, где преобразуются в два цифровых сигнала двух уровней («0», «1») так, что с первого выхода формирователя снимается сигнал, "нулевое" значение которого соответствует условию |W2|≤k·|W1|, "единичное" значение - условию |W2|≥k·|W1|, а со второго выхода снимается сигнал, "нулевое" значение которого соответствует условию |W1|>k·|W2|, "единичное" значение - условию |W1|<k·|W2|. Эти сигналы подаются соответственно на третий и четвертый входы формирователя сигналов управления коммутаторами 19, на первый и второй ходы которого с третьего и четвертого выходов устройства выделения модуля и знака 17 поступают цифровые сигналы двух уровней, несущие информацию о знаках функций соответственно signW1 и signW2. Цифровые двухуровневые выходные сигналы поступают на первый 131 и второй 132 коммутаторы, с объединенного выхода которых снимается сформированный в соответствии с рассмотренным выше алгоритмом аналоговый сигнал компенсации взаимосвязи, который поступает на первый усилитель-сумматор 141, охваченный обратной связью 16. На второй вход схемы обратной связи 16 подаются внешние сигналы коррекции К4 коэффициента усиления первого усилителя-сумматора 141 (учитывающие такие факторы, как скоростной напор, продольные ускорения ракеты и т.д.), который выбирается из условия наилучшей сходимости момента косой обдувки mхко, и сигнала компенсации σком взаимосвязи. С выхода первого усилителя сумматора 141 сигнал компенсации σком взаимосвязи через ограничитель 15 и третий инвертор 123 подается на второй вход четвертого сумматора 64 в КУК 3, где вычитается из сигнала управления σ3 элеронами.
С помощью математического моделирования установлено, что использование изобретения обеспечивает существенное уменьшение колебательности переходных процессов по поперечным ускорениям при отработке скачкообразных входных команд управления К1 или К2 и позволяет уменьшить выброс по углу крена в 4-5 раз.
Источники информации:
1. В.К. Святодух. Динамика пространственного движения управляемых ракет. М., «Машиностроение», 1969, стр.79-81, рис.2.7, 2.8.
2. Интегральные микросхемы. М., «Энергоатомиздат», 1985.
3. RU 2089452, В64С 17/06, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОПИЛОТ ДЛЯ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ, СТАБИЛИЗИРОВАННОЙ ПО КРЕНУ | 2005 |
|
RU2293686C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2527391C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2540483C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2262730C1 |
| АВТОПИЛОТ | 2008 |
|
RU2374131C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2253821C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
Изобретение относится к управлению летательными аппаратами, в частности к автопилотам зенитных управляемых ракет (ЗУР), и может быть использовано в ЗУР, имеющих симметричную аэродинамическую компоновку. Автопилот для симметричной ЗУР включает в себя два идентичных канала поперечного управления, каждый из которых содержит последовательно включенные формирователь сигнала ошибки по поперечному ускорению и формирователь сигнала управления приводом пары рулей, находящихся в одной плоскости, и канал управления углом крена, содержащий последовательно включенные формирователь сигнала ошибки по крену и формирователь сигнала управления приводом всех рулей ракеты. Кроме того, имеется блок компенсации аэродинамической взаимосвязи каналов автопилота, выход которого подключен ко второму входу сумматора, первый вход которого соединен с выходом канала управления углом крена. Техническим результатом заявленного изобретения является повышение точности управления зенитных управляемых ракет. 1 з.п. ф-лы, 3 ил.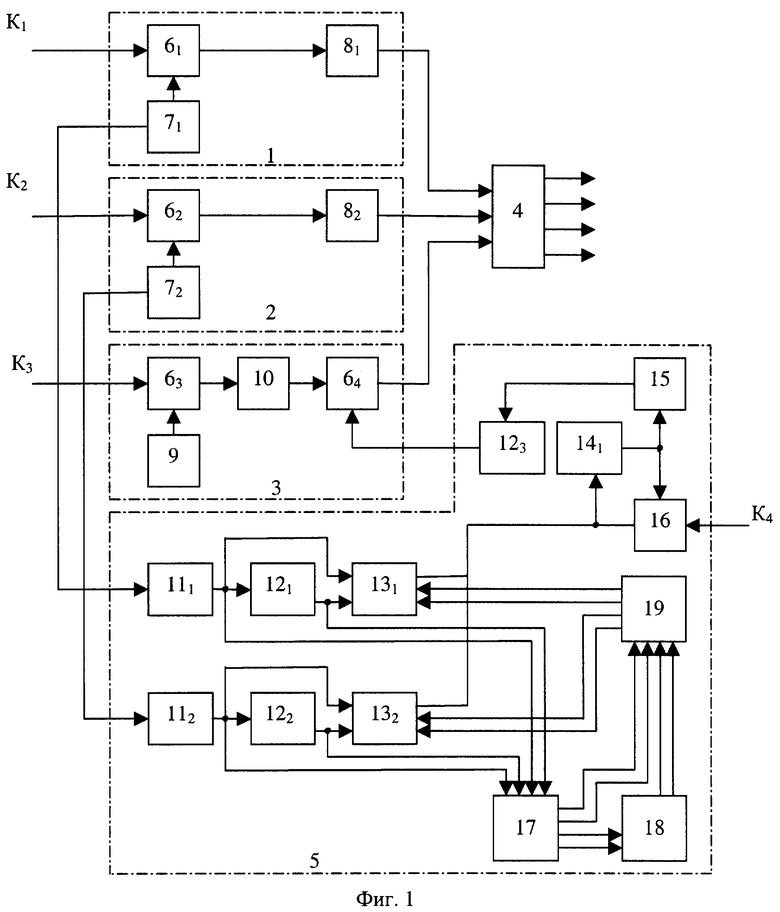
| СВЯТОДУХ В.К | |||
| Динамика пространственного движения управляемых ракет | |||
| - М.: Машиностроение, 1969, с.79-81 | |||
| ГОЛУБЕВ И.С., СВЕТЛОВА В.С | |||
| Проектирование зенитных управляемых ракет | |||
| - М.: МАИ, 1999 | |||
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ РАКЕТОЙ С КРЕСТООБРАЗНЫМ РАСПОЛОЖЕНИЕМ КРЫЛЬЕВ | 1980 |
|
RU2089452C1 |
| Способ получения гидрата окиси кадмия | 1931 |
|
SU44972A1 |
| УСТРОЙСТВО ДЛЯ ОХЛАЖДЕНИЯ КАМЕРЫ | 1996 |
|
RU2102660C1 |

