Изобретение относится к области авиационной техники, а именно к системам ручного управления в канале курса летательного аппарата (ЛА) нормальной схемы с дифференциально отклоняемым стабилизатором.
Современные маневренные ЛА управляются в боковом канале с помощью автоматизированных систем, в состав которых входят педали, ручка поперечного управления, система дистанционного управления (СДУ) с тем или иным законом управления, рулевые приводы элеронов и руля направления, на входы которых поступают сигналы с выходов СДУ (Г.С. Бюшгенс. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. Москва. «Наука. Физматлит», 1998 г., с. 811, с. 651, рис. 14.4.4; Г.С. Бюшгенс, Р.В. Студнев. Аэродинамика самолета. Динамика продольного и бокового движения. Москва. «Машиностроение», 1979 г., с. 352, с. 315, рис. 36.66, с. 308, рис. 36.1; Гуськов Ю.П., Загайнов Г.И. Управление полетом самолетов: Учебник для авиационных вузов. - М.: Машиностроение, 1980, 213.с., ил., с. 117÷119).
Недостаток известных систем управления (СУ) заключается в том, что существующие СДУ не обеспечивают в должной мере удовлетворительные характеристики устойчивости и управляемости ЛА в канале курса в диапазоне околозвуковых чисел М и малых высот полета при управлении по крену с использованием дифференциально отклоняемого стабилизатора, в том числе с открытым тормозным щитком. Существующие СДУ для оптимизации динамических характеристик движения в канале крена используют перекрестную связь алгоритмов управления канала крена и канала курса для минимизации углов скольжения и возникающей боковой перегрузки, наличие которых приводит к увеличению нагрузок, действующих на агрегаты планера ЛА. Летчиками негативно оценивается также падение величины угловой скорости крена. Величина момента рыскания,
возникающего при отклонении дифференциально отклоняемого стабилизатора для управления в канале крена, зависит не только от числа М и угла атаки, но и от величины угла отклонения стабилизатора в продольном движении. Из-за наличия продольного момента ЛА при отсутствии подъемной силы, который, как правило, на околозвуковых режимах полета становится положительным, угол отклонения стабилизатора ЛА с нормальной аэродинамической схемой в продольной плоскости уменьшается и из отрицательной области углов отклонения может переходить в положительную. При этом меняется знак момента рыскания, возникающий на этих режимах при дифференциальном отклонении стабилизатора. Аналогичное изменение момента рыскания происходит и при отдаче ручки управления по тангажу «от себя» в область положительных углов отклонения стабилизатора. Это явление не учитывается в существующих СУ, что приводит к появлению на указанных выше режимах полета значительных углов скольжения и боковых перегрузок при управлении в канале крена. Дополнительный рост этих кинематических параметров провоцирует выпуск тормозного щитка, который при наличии скольжения влияет на величину динамической боковой устойчивости ЛА и, тем самым, способствует дальнейшему увеличению угла скольжения и боковой перегрузки. В наибольшей степени рассмотренный негативный эффект проявляется на малых высотах (до трех километров).
Прототипом заявляемой системы управления ЛА в канале курса является автомат путевой устойчивости, представленный в работе Г.С. Бюшгенс. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. Москва. «Наука. Физматлит», 1998 г., с. 811, с. 651, рис. 14.4.4. СУ содержит датчики перемещения педалей хп, перемещения ручки управления по крену хγ, угла атаки α, угловой скорости крена ωх, угловой скорости рыскания ωу, боковой перегрузки nz, рулевой привод элеронов, рулевой привод руля направления и вычислительное устройство (ВУ), формирующее сигналы управления на рулевые приводы элеронов и руля направления в соответствии с блок-схемой, представленной на рис. 14.4.4.
Целью изобретения является обеспечение удовлетворительных характеристик устойчивости и управляемости в канале курса ЛА нормальной схемы с дифференциально отклоняемым стабилизатором на малых высотах и околозвуковых числах М при управлении в канале крена, в том числе с отклоненным тормозным щитком.
Технический результат, достигаемый предлагаемым изобретением, заключается в повышении надежности системы управления ЛА.
Ожидаемый технический результат достигается системой управления летательного аппарата в канале курса, включающей в себя вычислительное устройство (ВУ) системы дистанционного управления (СДУ) ЛА, датчики перемещения педалей хп, перемещения ручки управления по крену хγ, угла атаки α, угловой скорости крена ωх, угловой скорости рыскания ωу, боковой перегрузки nz, выходы которых подключены соответственно к первому, второму, третьему, четвертому, пятому и шестому входам ВУ, ВУ снабжен первым и вторым выходами по сигналам управления соответственно рулем направления и элеронами ЛА, рулевой привод элеронов РПэ, рулевой привод руля направления РПн, первый сумматор, первый вход которого подключен к первому выходу ВУ, а выход которого соединен с входом РПн, первый и второй блоки перемножения, дополнительно содержащей датчик перемещения ручки управления по тангажу хϑ, систему вычисления воздушных сигналов (СВС), первый и второй выходы которой по сигналам числа М и статического давления Рст соединены соответственно с седьмым и восьмым входами ВУ, датчик угловой скорости тангажа ωz, выход которого соединен с девятым входом ВУ, левый РПлев и правый РПправ рулевые приводы дифференциального стабилизатора, рулевой привод тормозного щитка РПтщ, ВУ снабжен третьим, четвертым и пятым выходами соответственно по сигналам на отклонение левой и правой частей дифференциального стабилизатора Δϕ, на отклонение стабилизатора ϕст и на отклонение тормозного щитка δтщ, второй и третий сумматоры, выходы которых соединены соответственно с входами левого РПлев и правого РПправ рулевых приводов дифференциального стабилизатора, первые входы второго и третьего сумматоров подключены к четвертому выходу ВУ, второй вход второго сумматора и второй инвертирующий вход третьего сумматора соединены с третьим выходом ВУ, четвертый сумматор, первый и второй нелинейные блоки, входы которых подключены соответственно к четвертому и пятому выходам ВУ, а выходы - к первому инвертирующему входу и к второму входу четвертого сумматора, третий нелинейный блок, первый и второй входы которого соединены соответственно с первым и вторым выходами СВС, четвертый нелинейный блок, вход которого подключен к выходу датчика угла атаки а, третий блок перемножения, первый и второй входы которого подключены соответственно к выходу четвертого нелинейного блока и к выходу второго блока перемножения, а выход - к второму входу первого сумматора, при этом первый и второй входы первого блока перемножения подключены соответственно к выходу третьего нелинейного блока и к выходу датчика перемещения ручки управления по крену хγ, первый и второй входы второго блока перемножения подключены соответственно к выходу первого блока перемножения и к выходу четвертого сумматора, вход РПтщ подключен к пятому выходу ВУ, а выход датчика перемещения ручки управления по тангажу хϑ соединен с десятым входом ВУ.
В предлагаемой СУ формируется дополнительная цепь перекрестной связи, которая осуществляет отклонение руля направления на величину, достаточную для уменьшения до приемлемого уровня возникших при рассматриваемой форме движения углов скольжения и боковой перегрузки. Этот алгоритм учитывает как параметры режима полета: число М, высоту (статическое давление), угол атаки, так и положение (угол отклонения) стабилизатора при управлении в продольной плоскости и угол отклонения тормозного щитка.
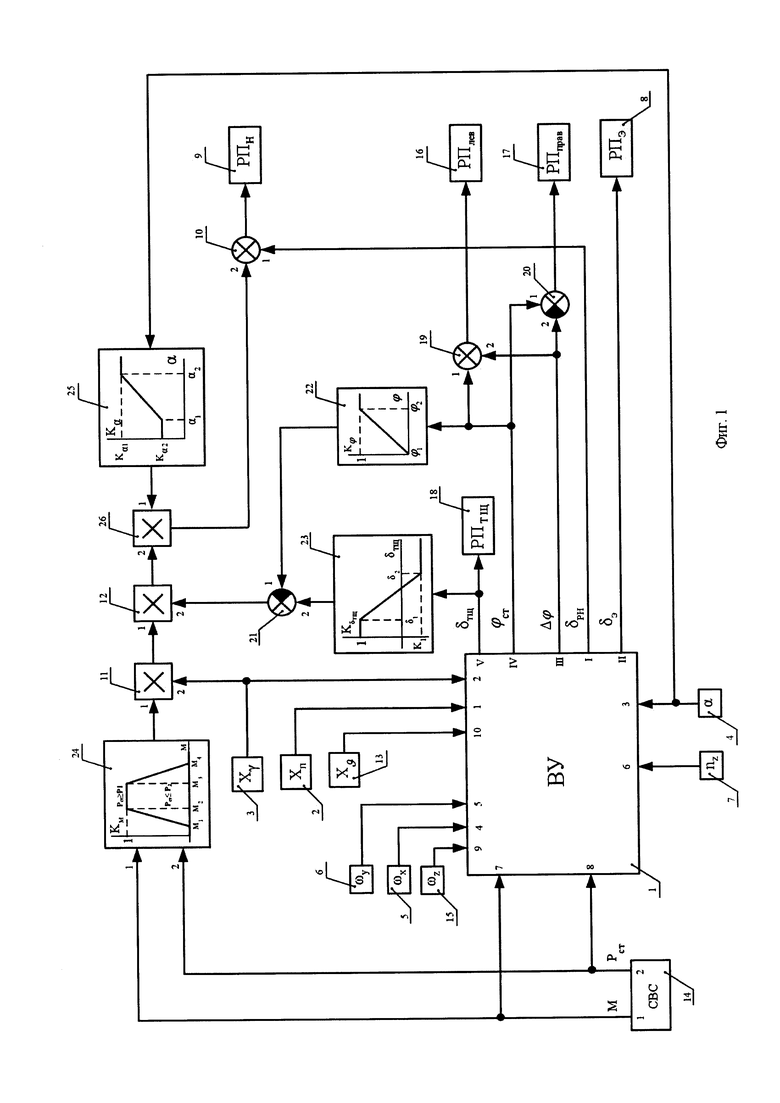
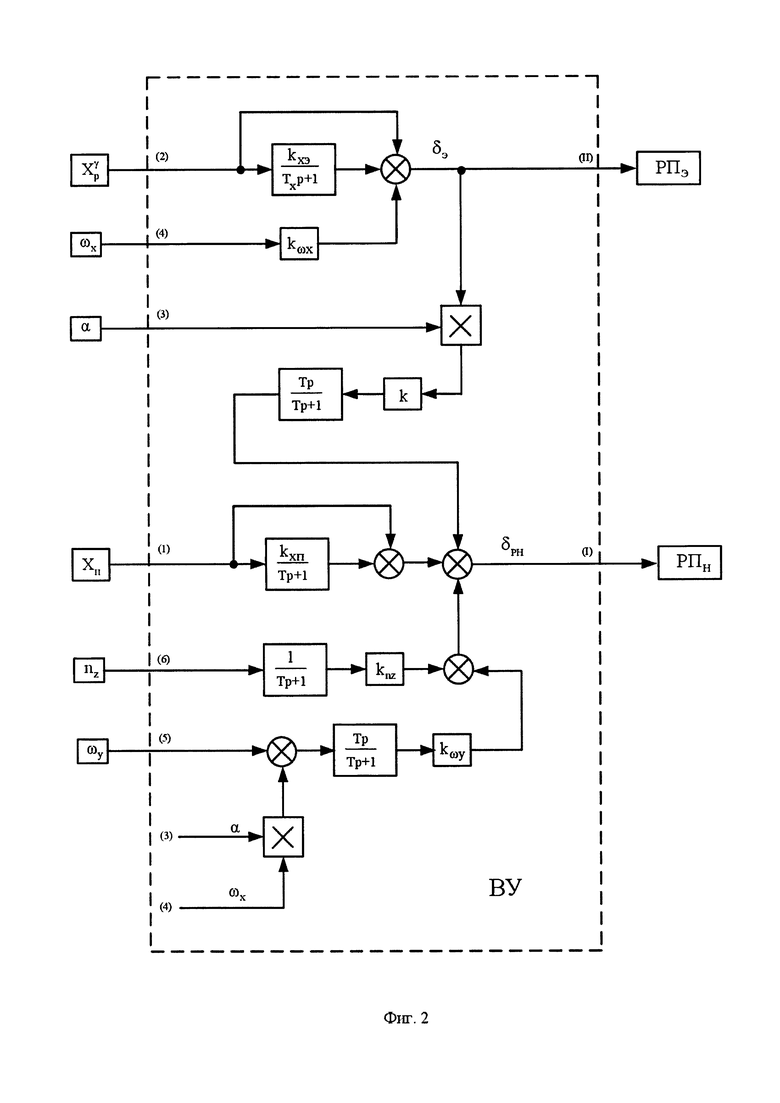
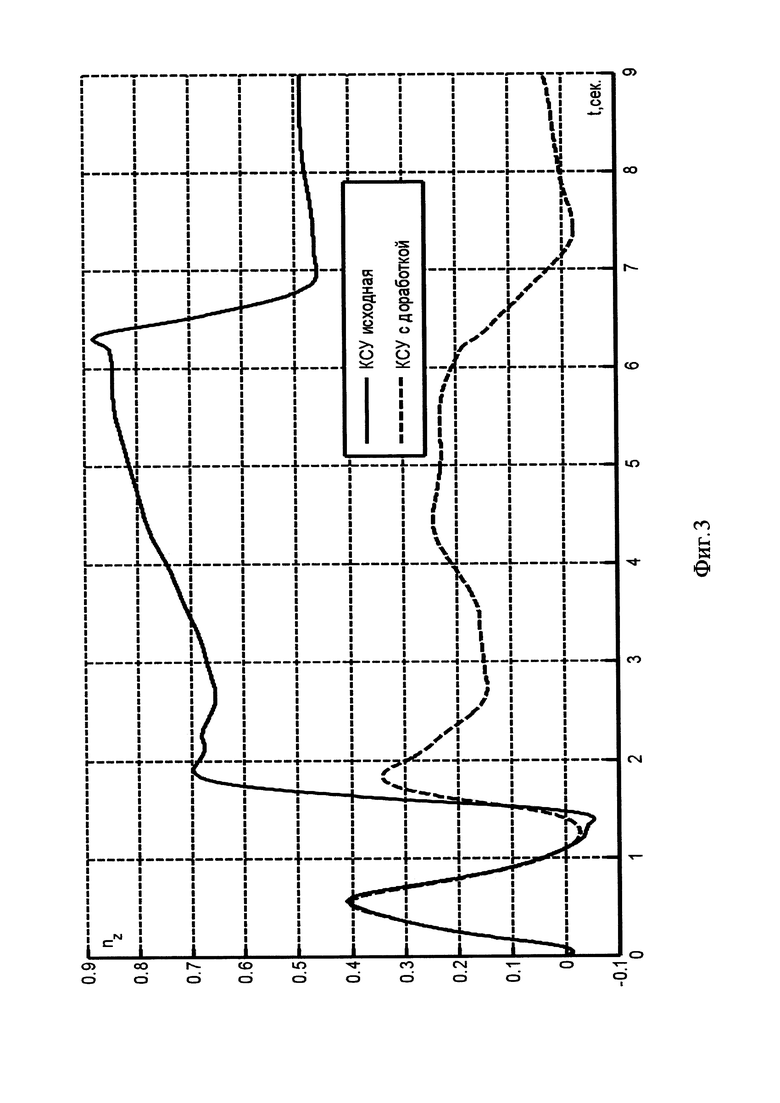
Сущность изобретения поясняется графическими изображениями. На фиг. 1 представлена структурная схема предлагаемой системы управления ЛА в канале курса, на фиг. 2 показан вариант реализации ВУ, на фиг. 3 изображены графики
изменения текущих значений nz - боковой перегрузки - в процессе выполнения маневра с исходной и с предлагаемой СУ. На графических изображениях приняты следующие обозначения:
1 - ВУ (вычислительное устройство для формирования законов управления ЛА в СУ);
2 - датчик перемещения педалей хп;
3 - датчик перемещения ручки управления ЛА по крену хγ;
4 - датчик угла атаки α;
5 - датчик угловой скорости крена ωх;
6 - датчик угловой скорости рыскания ωу;
7 - датчик боковой перегрузки nz;
8 - рулевой привод элеронов РПэ;
9 - рулевой привод руля направления РПн;
10 - первый сумматор;
11, 12 - первый и второй блоки перемножения;
13 - датчик перемещения ручки управления ЛА по тангажу хϑ;
14 - система вычисления воздушных сигналов (СВС);
15 - датчик угловой скорости тангажа ωz;
16, 17 - левый РПлев и правый РПправ рулевые приводы отклонения соответственно левой и правой частей дифференциального стабилизатора ЛА;
18 - рулевой привод тормозного щитка РПтщ;
19, 20, 21 - второй, третий и четвертый сумматоры;
22, 23, 24, 25 - первый, второй, третий и четвертый нелинейные блоки;
26 - третий блок перемножения;
ωх, ωу, ωz - сигналы угловых скоростей соответственно: крена, рыскания и тангажа с выходов датчиков 5, 6 и 15;
М, Р ст - сигналы числа М и статического давления на выходах СВС 14;
α - сигнал угла атаки на выходе датчика 4;
ϕст - сигнал с выхода ВУ 1 на отклонение стабилизатора ЛА;
Kϕ - передаточное число первого нелинейного блока 22, регулируемое по сигналу ϕст;
ϕ1, ϕ2 - опорные значения угла отклонения стабилизатора при управлении в продольной плоскости;
δтщ - сигнал отклонения тормозного щитка;
 - передаточное число второго нелинейного блока 23, регулируемое по сигналу отклонения тормозного щитка с выхода ВУ 1;
- передаточное число второго нелинейного блока 23, регулируемое по сигналу отклонения тормозного щитка с выхода ВУ 1;
δ1…δ2 - опорные значения угла отклонения тормозного щитка δтщ;
K1 - нижний уровень передаточного числа второго нелинейного блока 23;
Kм - передаточное число третьего нелинейного блока 24, регулируемое по сигналам числа М и статического давления Рст;
М1, М2, М3; М4 - опорные значения числа М в нелинейном блоке 24;
P1, P2 - опорные значения статического давления в нелинейном блоке 24;
Kα - передаточное число четвертого нелинейного блока 25, регулируемое по сигналу угла атаки α с датчика 4;
α1…α2 - опорные значения угла атаки в четвертом нелинейном блоке 25;
Kα1, Kα2 - верхний и нижний уровни изменения передаточного числа четвертого нелинейного блока 25;
Δϕ - сигнал с выхода ВУ 1 на отклонение левой и правой частей стабилизатора («ножниц») для управления ЛА по крену;
δрн - сигнал с выхода ВУ 1 на отклонение руля направления;
δ э - сигнал с выхода ВУ 1 на отклонение элеронов для управления ЛА по
крену.
Заявляемая система управления летательного аппарата в канале курса включает в себя вычислительное устройство ВУ 1 системы дистанционного управления ЛА, датчики перемещения педалей хп 2, перемещения ручки управления по крену хγ 3, угла атаки α 4, угловой скорости крена ωх 5, угловой скорости рыскания ωу 6, боковой перегрузки nz 7, выходы которых подключены соответственно к первому, второму, третьему, четвертому, пятому и шестому входам ВУ 1, ВУ 1 снабжен первым и вторым выходами по сигналам управления соответственно рулем направления и элеронами ЛА, рулевой привод элеронов РПэ 8, рулевой привод руля направления РПн 9, первый сумматор 10, первый вход которого подключен к первому выходу ВУ 1, а выход которого соединен с входом РПн 9, первый 11 и второй 12 блоки перемножения. СУ дополнительно содержит датчик перемещения ручки управления по тангажу хϑ 13, СВС 14, первый и второй выходы которой по сигналам числа М и статического давления Р ст соединены соответственно с седьмым и восьмым входами ВУ 1, датчик угловой скорости тангажа ωz 15, выход которого соединен с девятым входом ВУ 1, левый РПлев 16 и правый РПправ 17 рулевые приводы дифференциального стабилизатора, рулевой привод тормозного щитка РПтщ 18, ВУ 1 снабжен третьим, четвертым и пятым выходами соответственно по сигналам на отклонение левой и правой частей дифференциального стабилизатора Δϕ, на отклонение стабилизатора ϕст и на отклонение тормозного щитка δтщ, второй 19 и третий 20 сумматоры, выходы которых соединены соответственно с входами левого РПлев 16 и правого РПправ 17 рулевых приводов дифференциального стабилизатора, первые входы второго 19 и третьего 20 сумматоров подключены к четвертому выходу ВУ 1, второй вход второго сумматора 19 и второй инвертирующий вход третьего сумматора 20 соединены с третьим выходом ВУ 1, четвертый сумматор 21, первый 22 и второй 23 нелинейные блоки, входы которых подключены соответственно к четвертому и пятому выходам ВУ 1, а выходы - к первому инвертирующему входу и к второму входу четвертого сумматора 21, третий нелинейный блок 24, первый и второй входы которого соединены соответственно с первым и вторым выходами СВС 14, четвертый нелинейный блок 25, вход которого подключен к выходу датчика
угла атаки α 4, третий блок перемножения 26, первый и второй входы которого подключены соответственно к выходу четвертого нелинейного блока 25 и к выходу второго блока перемножения 12, а выход - к второму входу первого сумматора 10, при этом первый и второй входы первого блока перемножения 11 подключены соответственно к выходу третьего нелинейного блока 24 и к выходу датчика перемещения ручки управления по крену хγ 3, первый и второй входы второго блока перемножения 12 подключены соответственно к выходу первого блока перемножения 11 и к выходу четвертого сумматора 21, вход РПтщ 18 подключен к пятому выходу ВУ 1, а выход датчика перемещения ручки управления по тангажу хϑ 13 соединен с десятым входом ВУ 1.
Заявляемая к патентованию СУ работает следующим образом.
На входы ВУ 1 поступают сигналы с датчиков перемещения педалей 2, поперечного перемещения ручки 3 для управления по крену, продольного перемещения ручки 13 для управления по тангажу, сигналы с датчиков угла атаки 4, угловой скорости крена 5, угловой скорости рыскания 6, боковой перегрузки 7, угловой скорости тангажа 15 и с блока СВС 14. На основании входных сигналов с перечисленных выше датчиков ВУ 1 формирует выходные сигналы управления ЛА по трем каналам, которые подаются на соответствующие приводы, отклоняющие органы управления ЛА для реализации заданного ВУ 1 закона управления. Так, привод элеронов 8 отклоняет элероны на соответствующий угол δ э для управления по крену.
Возможный вариант исполнения ВУ, представленный на фиг. 2 и описанный в прототипе, может содержать как блоки передаточных чисел от ручки управления и педалей к приводам органов управления ЛА, формирующие прямые связи СДУ, так и блоки передаточных чисел демпфера крена, автомата устойчивости пути, перекрестных связей и т.д., образующих обратные связи СДУ.
Сигнал управления стабилизатором по тангажу ϕ ст алгебраически складывается в сумматорах 19 и 20 с обеспечивающим управление по крену сигналом «ножниц» дифференциального стабилизатора Δϕ и направляется на входы приводов 16 и 17 левой и правой частей стабилизатора, обеспечивающих управление ЛА по тангажу и крену. При наличии команды на выпуск тормозного щитка, соответствующий сигнал из ВУ 1 поступает на вход привода тормозного щитка 18, отклоняющего этот орган управления ЛА. Сигнал, обеспечивающий управление ЛА в канале курса от ВУ 1, поступает на первый вход первого сумматора 10.
Одновременно сигнал продольного отклонения стабилизатора с выхода ВУ 1 подается на вход первого нелинейного устройства 22, которое производит оценку величины угла отклонения стабилизатора для продольного управления ϕ ст так, что при ϕст≥ϕ1 начинает формироваться дополнительный сигнал перекрестной связи канала крена с каналом рыскания, который достигает своего полного значения при ϕст≥ϕ2. Таким образом в действие вводится перекрестная связь со знаком, противоположным знаку основной перекрестной связи, сформированной в ВУ 1, в диапазоне углов отклонения стабилизатора по тангажу, где происходит изменение знака момента рыскания от дифференциального отклонения («ножниц») стабилизатора. Полученный на выходе блока 22 коэффициент усиления Kϕ поступает на первый вход четвертого сумматора 22. Аналогично формируется передаточный коэффициент, учитывающий влияние угла отклонения тормозного щитка на боковую управляемость ЛА, включая перемену знака перекрестной связи в диапазоне углов отклонения тормозного щитка δ1…δ2 так, что соответствующее передаточное число поступает на второй вход четвертого сумматора 21. Вид передаточных чисел Kϕ и , а также величина и количество опорных значений δ1…δ2, ϕ1…ϕ2 - принадлежность и отражения особенностей аэродинамики конкретного ЛА. Алгебраическая сумма на выходе этого сумматора представляет собой полный коэффициент усиления дополнительной перекрестной связи по углам отклонения рассмотренных органов управления. Далее полученный сигнал с выхода сумматора 21 поступает на второй вход второго блока перемножения 12.
Сигналы числа М и статического давления Рст с первого и второго выходов блока СВС 14 поступают на входы третьего нелинейного устройства 24, формирующего границы применения дополнительной перекрестной связи по числу М и высоте полета (через статическое давление) посредством характерных для данного ЛА опорных значений переменных М1÷ М4 и P1, Р2. Сигнал с выхода блока 24 поступает на первый вход первого блока умножения 11.
Сигнал поперечного перемещения ручки управления с датчика 3 поступает на второй вход первого блока умножения 11.
Произведение сигналов с выхода блока 11 поступает на первый вход второго блока перемножения 12. Полученный результат поступает на второй вход третьего блока перемножения 26.
Сигнал с выхода датчика угла атаки 4 поступает на вход четвертого нелинейного устройства 25, формирующего закон коррекции сигнала дополнительной перекрестной связи по углу атаки с помощью передаточного числа Кα. Данный коэффициент является функцией угла атаки посредством характерных для данного ЛА опорных значений α1…α2. Полученный на выходе блока 25 сигнал поступает на первый блок третьего блока умножения 26.
Полученное на выходе третьего блока умножения 26 произведение представляет собой результирующий сигнал дополнительной перекрестной связи. Это значение подается на второй вход первого сумматора 10.
Сумма сигналов, сформированная на выходе сумматора 10 представляет собой управляющий сигнал в канале курса ЛА, учитывающий влияние дополнительной перекрестной связи, сформированной для реализации заявляемого положительного эффекта. Дополнительная перекрестная связь реализует передачу сигнала перемещения ручки управления по крену с датчика 3 в руль направления 9 с одновременной коррекцией этого сигнала по величине с помощью нелинейных блоков 23÷25 по режимам полета, по величинам перемещения тормозного щитка и стабилизатора и по углу атаки смолета. Сигнал с выхода сумматора 10, поступающий на вход привода 9 отклоняет руль направления ЛА на угол, необходимый
для управления в канале курса с учетом особенностей, присущих данному ЛА в околозвуковом диапазоне режимов полета при продольном отклонении стабилизатора и выпуске тормозного щитка.
Детальная реализация ВУ 1 зависит от конкретного типа ЛА. На фиг. 2 представлен пример построения ВУ, используемого в прототипе СУ (Г.С. Бюшгенс. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. Москва. «Наука. Физматлит», 1998 г., с. 811, с. 651, рис. 14.4.4). Описание работы ВУ и принятые на рисунке обозначения приведены на с. 650÷652. Структура нелинейных блоков 22, 23, 24 и 25 также определяется конкретным типом ЛА. На фиг.1 приведен вариант реализации этих блоков для одного из самолетов семейства МиГ.
На фиг. 3 представлено сравнение характеристик движения в канале курса ЛА с исходной и предлагаемой СУ при выполнении отклонения ручки управления по крену на полный ход в процессе выпуска тормозного щитка на околозвуковом режиме полета. На рисунке обозначено: t - время в секундах; nz - изменение боковой перегрузки в процессе выполнения маневра; «исходная» - исходная СУ; «с доработкой» - предлагаемая СУ.
Как видно из фиг. 3, предлагаемая к патентованию СУ позволяет уменьшить заброс боковой перегрузки примерно в два раза до приемлемых по оценке летчика значений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2769452C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
Изобретение относится к области авиационной техники, а именно к системам ручного управления в канале курса летательного аппарата (ЛА) нормальной схемы с дифференциально отклоняемым стабилизатором. В системе управления формируется дополнительная цепь перекрестной связи, которая осуществляет отклонение руля направления на величину, достаточную для уменьшения до приемлемого уровня возникших при рассматриваемой форме движения углов скольжения и боковой перегрузки. Этот алгоритм учитывает, как параметры режима полета: число М, высоту (статическое давление), угол атаки, так и положение (угол отклонения) стабилизатора при управлении в продольной плоскости и угол отклонения тормозного щитка. Система управления позволяет уменьшить заброс боковой перегрузки примерно в два раза до приемлемых по оценке летчика значений. 3 ил.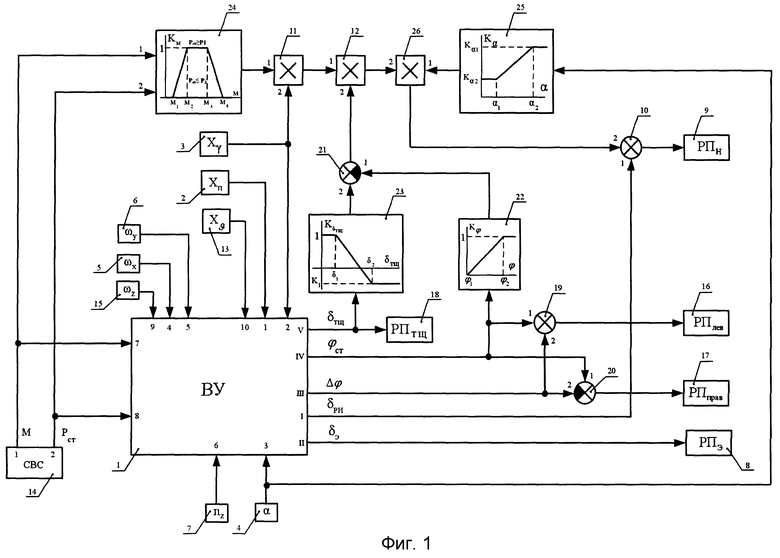
Система управления (СУ) летательного аппарата (ЛА) в канале курса, включающая в себя вычислительное устройство (ВУ) системы дистанционного управления (СДУ) ЛА, датчики перемещения педалей хп, перемещения ручки управления по крену хγ, угла атаки α, угловой скорости крена ωx, угловой скорости рыскания ωу, боковой перегрузки nz, выходы которых подключены соответственно к первому, второму, третьему, четвертому, пятому и шестому входам ВУ, ВУ снабжено первым и вторым выходами по сигналам управления соответственно рулем направления и элеронами ЛА, рулевой привод элеронов РПэ, рулевой привод руля направления РПн, первый сумматор, первый вход которого подключен к первому выходу ВУ, а выход которого соединен с входом РПн, первый и второй блоки перемножения, дополнительно содержащая датчик перемещения ручки управления по тангажу хϑ, систему вычисления воздушных сигналов (СВС), первый и второй выходы которой по сигналам числа М и статического давления Рст соединены соответственно с седьмым и восьмым входами ВУ, датчик угловой скорости тангажа ωz, выход которого соединен с девятым входом ВУ, левый РПлев и правый РПправ рулевые приводы дифференциального стабилизатора, рулевой привод тормозного щитка РПтщ, ВУ снабжено третьим, четвертым и пятым выходами соответственно по сигналам на отклонение левой и правой частей дифференциального стабилизатора Δϕ, на отклонение стабилизатора ϕст и на отклонение тормозного щитка δтщ, второй и третий сумматоры, выходы которых соединены соответственно с входами левого РПлев и правого РПправ рулевых приводов дифференциального стабилизатора, первые входы второго и третьего сумматоров подключены к четвертому выходу ВУ, второй вход второго сумматора и второй инвертирующий вход третьего сумматора соединены с третьим выходом ВУ, четвертый сумматор, первый и второй нелинейные блоки, входы которых подключены соответственно к четвертому и пятому выходам ВУ, а выходы - к первому инвертирующему входу и к второму входу четвертого сумматора, третий нелинейный блок, первый и второй входы которого соединены соответственно с первым и вторым выходами СВС, четвертый нелинейный блок, вход которого подключен к выходу датчика угла атаки α, третий блок перемножения, первый и второй входы которого подключены соответственно к выходу четвертого нелинейного блока и к выходу второго блока перемножения, а выход - к второму входу первого сумматора, при этом первый и второй входы первого блока перемножения подключены соответственно к выходу третьего нелинейного блока и к выходу датчика перемещения ручки управления по крену хγ, первый и второй входы второго блока перемножения подключены соответственно к выходу первого блока перемножения и к выходу четвертого сумматора, вход РПтщ подключен к пятому выходу ВУ, а выход датчика перемещения ручки управления по тангажу хϑ соединен с десятым входом ВУ.
| Способ и устройство улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании | 2018 |
|
RU2692740C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ДЛЯ РУЛЕВЫХ ПРИВОДОВ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2703007C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| US 20100087970 A1, 08.04.2010 | |||
| US 20030034421 A1, 20.02.2003 | |||
| WO 2007042290 A1, 19.04.2007. | |||

