Изобретение относится к устройствам для определения по меньшей мере одной величины, связанной с электромагнитным излучением тестируемого объекта.
Известны устройства для определения диаграммы излучения тестируемого объекта, представляющие собой сеть датчиков, распределенных на круглой арке, на участке арки, на сфере, на участке сферы (сферический купол) или на участке цилиндра (цилиндрический купол), установленном вокруг исследуемого тестируемого объекта, или на линии или плоскости, располагаемой перед исследуемым тестируемым объектом.
Так, известны устройства этого типа, содержащие средства, позволяющие арке датчиков, участку арки, сфере или участку сферы и тестируемому объекту поворачиваться относительно друг друга вокруг оси, которая соответствует диаметру арки или сферы таким образом, чтобы измерять излучение тестируемого объекта в последовательных плоскостях, распределенных вокруг оси относительного вращения арки или сферы и тестируемого объекта, то есть на сфере или участке сферы, охватывающей объект.
Известно также использование сетей датчиков в виде арки, участка арки или участка цилиндра путем относительного перемещения тестируемого объекта перпендикулярно по отношению к плоскости сети датчиков таким образом, чтобы измерять излучение на цилиндре или участке цилиндра, охватывающего объект.
Известно также использование сетей датчиков в виде линии путем относительного вращения тестируемого объекта вокруг оси, параллельной сети датчиков таким образом, чтобы измерять излучение на цилиндре, охватывающем объект.
Известно также использование сетей датчиков в виде линии или плоскости путем относительного перемещения тестируемого объекта на плоскости, параллельной сети датчиков таким образом, чтобы измерять излучение на плоскости перед объектом.
Вместе с тем эти устройства с сетью датчиков в виде арки, сферы, линии или плоскости, независимо от того, используют их для измерения сферических, цилиндрических или планарных координат, имеют ограничения, связанные с дискретным шагом измерения из-за расположения датчиков в сети.
Действительно, число точек измерения, необходимое для измерения антенной на данной частоте, напрямую связано с размером источника излучения и с длиной волны на частоте измерения (λ). Например, для измерений при сферической или цилиндрической геометрии существуют различные критерии дискретизации с целью определения числа необходимых точек измерения вдоль арки, участка арки, на сфере, на участке сферы или участке цилиндра. Самый известный из них связан с минимальным расстоянием, равным λ/2, между точками дискретизации на минимальной сфере, охватывающей источник, которая имеет диаметр D и центр которой совпадает с центром сети, что соответствует угловому интервалу между измерительными датчиками сети, равному λ/D. Точно так же для измерений по планарной геометрии критерий дискретизации определяется минимальным расстоянием, равным λ/2, между точками дискретизации на плоскости перед источником, что соответствует интервалу между измерительными датчиками, равному λ/2.
Использование сети датчиков, в которой размер, число и интервал между измерительными датчиками физически ограничены, накладывает при этом либо для данной частоты условия по размерам тестируемого объекта, поле которого необходимо измерить, либо для данных размеров тестируемого объекта - условия по максимально возможной частоте измерения.
Чтобы устранить эти ограничения, в рамках измерений при помощи арок датчиков было предложено устройство, содержащее средство, позволяющее за счет вращения вокруг оси осуществлять относительный поворот сети датчиков и тестируемого объекта для углового смещения относительно друг друга сети датчиков и тестируемого объекта и обеспечения измерений в нескольких относительных угловых положениях сети датчиков и тестируемого объекта.
Таким образом, для каждого относительного положения сети датчиков увеличивают число точек измерения в плоскости арки, следовательно, при данных размерах измеряемого объекта это позволяет увеличить максимально возможную частоту измерения. Точно так же при данной частоте измерения это позволяет увеличить размеры тестируемого объекта, наблюдаемого в плоскости арки.
Задача изобретения состоит в создании устройства для относительного позиционирования сети датчиков и тестируемого объекта, выполненного с возможностью еще большего увеличения числа дискретных точек измерения.
Дополнительная задача изобретения состоит в создании устройства для относительного позиционирования сети датчиков и тестируемого объекта, позволяющего расширить область применения данной сети датчиков, в частности, в отношении размера объекта, диаграмму излучения которого необходимо определить, при сохранении неограниченной возможности дискретизации.
Еще одна задача изобретения состоит в создании устройства для относительного позиционирования сети датчиков и тестируемого объекта, обеспечивающего измерение излучения объектов больших размеров на более высоких частотах и с меньшим числом датчиков.
Также задача изобретения состоит в создании устройства для относительного позиционирования сети датчиков и тестируемого объекта, более простого в применении и выполненного с возможностью использования при любой форме сети датчиков измерительного устройства.
В связи с этим объектом настоящего изобретения является устройство для относительного позиционирования сети электромагнитных датчиков и тестируемого объекта, которое согласно изобретению содержит средство относительного перемещения тестируемого объекта и сети электромагнитных датчиков с по меньшей мере с двумя степенями свободы, причем это относительное перемещение позволяет увеличить число точек измерения по этим двум степеням свободы, чтобы осуществить дополнительную пространственную дискретизацию при помощи сети датчиков во время измерения излучаемого поля вокруг или перед объектом.
В частности, средство относительного перемещения тестируемого объекта и сети электромагнитных датчиков предпочтительно имеют третью степень свободы, которую можно использовать для дополнительной дискретизации или для наблюдения объекта с разных точек обзора.
В одном из вариантов осуществления изобретения устройство содержит средства перемещения со скольжением, предназначенные для перемещения либо объекта, либо сети датчиков в по меньшей мере одном направлении, и средства относительного вращения тестируемого объекта и сети датчиков вокруг главной оси вращения.
Эти средства вращения могут быть независимыми от средств перемещения со скольжением.
Как вариант, средства перемещения со скольжением и средства вращения расположены одно над другим.
Другие особенности, задачи и преимущества настоящего изобретения будут более понятны из дальнейшего подробного описания, представленного в качестве неограничивающего примера со ссылками на чертежи.
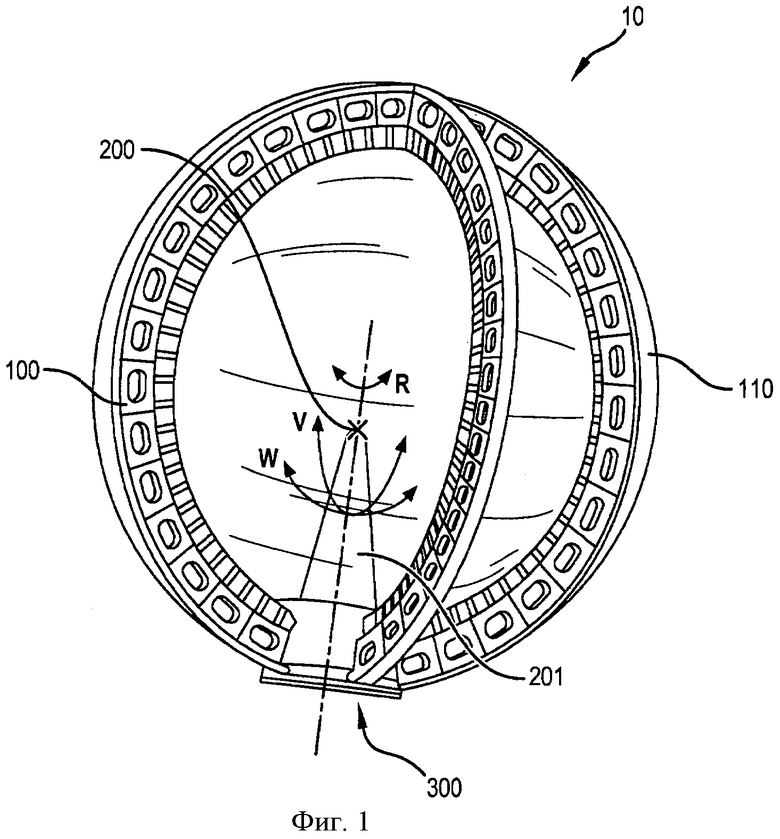
На фиг.1 показано устройство для определения электромагнитного излучения тестируемого объекта, содержащее средство позиционирования сети электромагнитных датчиков относительно тестируемого объекта;
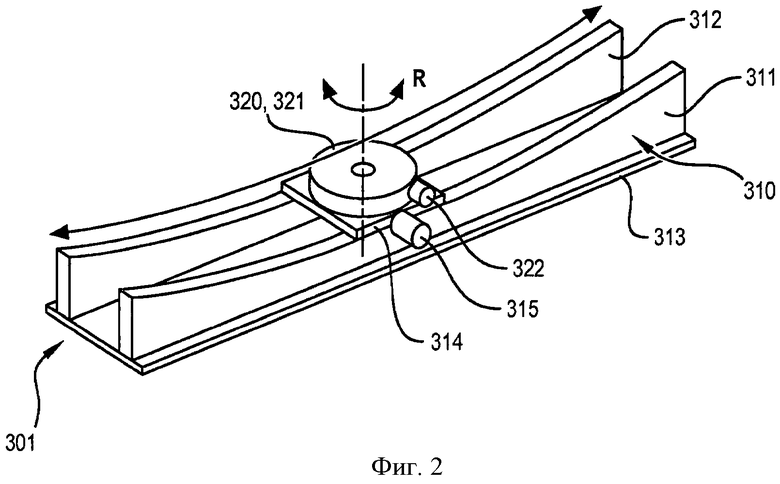
на фиг.2 схематично показан возможный вариант выполнения средства позиционирования сети электромагнитных датчиков относительно тестируемого объекта, показанного на фиг.1;
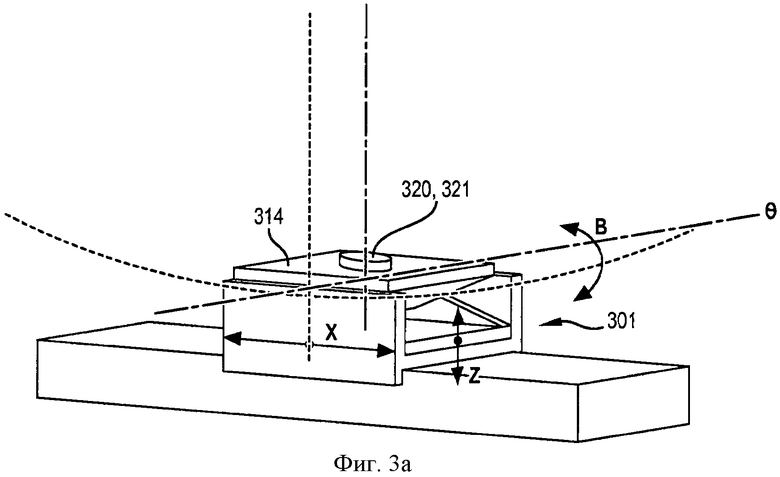
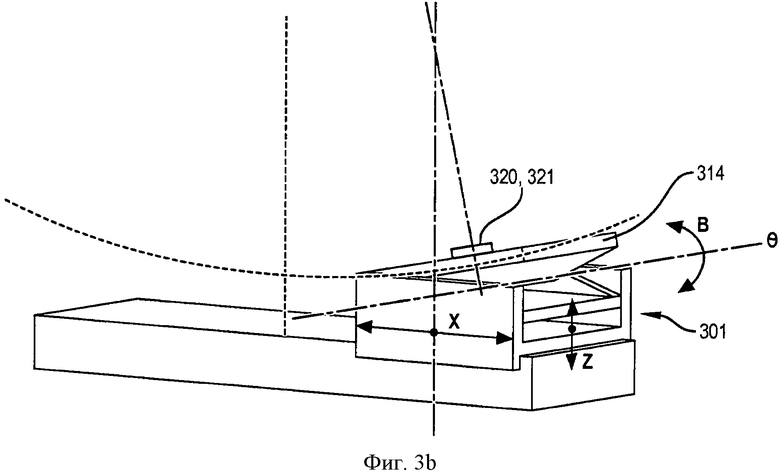
на фиг.3a и 3b, 4 и 5 схематично показаны другие возможные варианты выполнения средства позиционирования сети электромагнитных датчиков относительно тестируемого объекта, показанного на фиг.1.
Как показано на фиг.1, измерительное устройство 10 содержит сеть 100 измерительных антенн для определения диаграммы излучения тестируемого объекта 200, символически обозначенного крестиком.
Кроме того, имеется средство 300 относительного позиционирования сети 100 измерительных антенн и тестируемого объекта 200.
Сеть 100 измерительных антенн, называемая также сетью электромагнитных датчиков, распределена по сфере 110.
Следует отметить, что сеть 100 определена как ряд из n измерительных антенн, при этом n больше или равно 2.
Предпочтительно сеть 100 объединяет на сфере 110 несколько рядов электромагнитных датчиков, работающих на разных частотах для расширения рабочего диапазона измерительного устройства 10.
В качестве неограничивающего примера можно указать сеть 100, объединяющую два ряда электромагнитных датчиков, осуществляющих измерения в частотном диапазоне от 0,4 ГГц до 18 ГГц.
На фигуре показан также держатель 201, предназначенный для установки на нем объекта 200 с целью исследования его электромагнитных свойств.
Этот держатель 201 в основном выполнен в виде стойки, которая проходит от средства 300 позиционирования и практически доходит до геометрического центра сферы 110.
Объект 200 располагают на держателе, определяя его азимутальное положение и помещая его в область центра сферы 110 сети 100 электромагнитных датчиков.
Показанная на фиг.1 сферическая сеть электромагнитных датчиков является неподвижной, а стойка 201 установлена на средстве 300 позиционирования с возможностью относительного перемещения относительно сферической сети 100.
1. Средство относительного позиционирования сферической сети электромагнитных датчиков и тестируемого объекта
Средство относительного позиционирования сферической сети электромагнитных датчиков и тестируемого объекта 200 детально показано на фиг.2, 3, 4 и 5.
В варианте выполнения, показанном на фиг.2, это средство содержит направляющую 301 в виде дуги окружности, которая позволяет осуществлять относительное перемещение со скольжением тестируемого объекта 200 и сети 100 датчиков и предназначена для перемещения либо объекта 200, либо сети 100 датчиков в по меньшей мере одном направлении перемещения со скольжением в диаметральной плоскости сети 100 датчиков. Кроме того, на этой дугообразной направляющей 301 установлены, в частности, при помощи опоры 321 средства 320 вращения, которые при необходимости можно отсоединить от направляющей 301 и повернуть в осевом направлении, что позволяет осуществить относительный поворот тестируемого объекта 200 и сети 100 датчиков вокруг главной оси вращения, перпендикулярной к направлению перемещения со скольжением.
Средства 301 перемещения со скольжением, образующие направляющую дугу, предпочтительно предназначены для углового смещения тестируемого объекта 200 и сферической сети 100 датчиков относительно друг друга.
В частности, как показано на фиг.1, они позволят перемещать со скольжением тестируемый объект 200 в диаметральной плоскости сферической сети 100 датчиков вокруг геометрического центра сферы.
Направляющая 301 содержит две параллельные направляющие стенки 311 и 312, проходящие в направлении перемещения скольжением. Эти стенки 311 и 312 образуют направляюще средства 310 и расположены на основании 313, предназначенном для поддержания постоянного промежутка и наклона стенок 311 и 312.
Также имеется перемещаемая площадка 314, на которой установлены средства 320 вращения и которая позволяет перемещать тестируемый объект 200 вдоль направляющих средств 310 и фиксировать его в заданном положении.
Направляющие стенки 311, 312 имеют криволинейный профиль, предназначенный для обеспечения углового перемещения тестируемого объекта 200 вокруг геометрического центра сферы.
Как вариант, стенки 311 и 312 можно заменить вогнутой поверхностью для перемещения со скольжением, на которой размещают вогнутую поверхность перемещаемой площадки 314.
Средства перемещения со скольжением дополнительно содержат привод 315, выполненный с возможностью перемещения перемещаемой площадки 314 с тестируемым объектом 200 по направляющей 301 в направлении скольжения к искомому положению.
Например, привод 315 может содержать зубчатую передачу с зубчатой рейкой, червячную передачу, передачу с зубчатым ремнем или другие системы, связанные с электрическим приводом для перемещения тестируемого объекта 200 вдоль направляющих стенок 311 и 312.
Кроме того, на перемещаемой площадке 314 установлены средства 320 относительного вращения тестируемого объекта 200 и сети 100 датчиков, выполненные с возможностью свободного вращения по отношению к указанной перемещаемой площадке 314.
Средства относительного вращения тестируемого объекта 200 и сети 100 датчиков содержат опору 321, предназначенную для размещения на ней тестируемого объекта 200, и привод, выполненный с возможностью поворота опоры 321 вокруг ее главной оси вращения.
Таким образом, опора 321 поворачивает тестируемый объект 200 во время измерений сетью 100 электромагнитных датчиков таким образом, чтобы он совершал оборот вокруг своей оси. Для этого на уровне средств 320 вращения установлен привод 322 типа зубчатой передачи, зубчатого ремня, червячной передачи, беличьей клетки и т.д.
Понятно, что в описанном варианте осуществления изобретения, тестируемый объект 200 является подвижным и установлен на средства 300 позиционирования, а сеть 100 датчиков остается неподвижной. Возможен также и обратный вариант, когда сеть может быть подвижной и установлена при помощи средства 300, тогда как тестируемый объект является неподвижным.
Как вариант, средства 320 относительного вращения тестируемого объекта 200 и сети 100 датчиков можно отсоединить от перемещаемой площадки 314 и установить на неподвижном основании, установленном рядом со средствами 301 перемещения со скольжением или под этими средствами. В случае, когда средства 320 вращения расположены на неподвижном основании под средствами 301 перемещения со скольжением, перемещаемая площадка 314 выполнена таким образом, чтобы опора 321, предназначенная для установки тестируемого объекта 200, вместе с ее приводом вращения вокруг ее главной оси могла выступать за ее пределы. В этом варианте осуществления изобретения главная ось вращения держателя 301 тестируемого объекта 200 остается неподвижной, тогда как сфера 110 сети 100 датчиков установлена на перемещаемой площадке 314 с возможностью перемещения относительно тестируемого объекта 200. Возможен также обратный вариант, когда тестируемый объект 200 установлен на площадке, а сеть датчиков установлена с возможностью независимого вращения вокруг оси 301.
Согласно другому варианту выполнения средства 300, показанному на фиг.3a и 3b, средства 301 относительного перемещения со скольжением (или поворота) тестируемого объекта 200 и сети 100 датчиков могут быть выполнены с возможностью осуществления трех независимых механических движений (при помощи набора силовых цилиндров и/или электрических приводов): поступательного движения вдоль оси X, второго поступательного движения вдоль оси Z и вращения вокруг оси θ. Действительно, комбинация поступательных движений вдоль осей Х и Z обеспечивает криволинейный путь, эквивалентный пути, обеспечиваемому средствами 301 перемещения со скольжением, показанными на фиг.2, тогда как вращение вокруг оси 9 позволяет удерживать ориентацию перемещаемой площадки 314, оборудованной средствами 320 вращения. При этом ось вращения опоры 321 остается перпендикулярной к криволинейному ходу перемещения со скольжением. Преимуществом этого варианта осуществления изобретения является возможность адаптации к любому радиусу сферы 110 сети 100 датчиков и возможность цифрового программирования криволинейного пути перемещения со скольжением. Он позволяет также производить в реальном времени коррекцию траектории, например, при помощи лазера, измеряющего в реальном времени положение стойки 201 или положение тестируемого объекта 200.
Кроме того, согласно еще одному варианту выполнения средства 300, средства 301 относительного перемещения со скольжением тестируемого объекта 200 и сети 100 датчиков выполнены с возможностью перемещения либо объекта 200, либо сети 100 датчиков в двух перпендикулярных направлениях перемещения со скольжением, находящихся в одной или нескольких плоскостях сети 100 датчиков, на которых находятся средства 320 относительного вращения тестируемого объекта 200 и сети 100 датчиков вокруг главной оси вращения, перпендикулярной к направлениям перемещения со скольжением.
В этом случае, как показано на фиг.4, средства 301 перемещения со скольжением могут быть выполнены в виде первого направляющего средства 310, образованного двумя параллельными направляющими стенками 311 и 312, проходящими в первом направлении скольжения, на которых расположена первая перемещаемая площадка 314, и второго направляющего средства 330 (стенок 331 и 332), проходящего во втором направлении скольжения, перпендикулярном к первому направлению, на котором расположена вторая перемещаемая площадка 334.
Первый и второй узлы аналогичны средствам 301 перемещения со скольжением, описанным со ссылками на фиг.2.
Еще один вариант осуществления изобретения представляет собой комбинацию из смежных первого и второго узлов, аналогичных средствам 301 перемещения со скольжением, описанным со ссылками на фиг.3.
Ниже более подробное описана конструкция, показанная на фиг.4.
На первой перемещаемой площадке 314 установлена вторая направляющая 330. Таким образом, первая перемещаемая площадка 314 первого узла позволяет перемещать второй узел в первом направлении скольжения и фиксировать его в регулируемом положении вдоль направляющего средства 310.
Эти средства 301 перемещения со скольжением выполнены с возможностью обеспечения двух перпендикулярных угловых перемещений тестируемого объекта 200, чтобы он описывал контур сферы с центром на геометрическом центре сферической сети 100 электромагнитных датчиков.
На второй перемещаемой площадке 334 закреплена опора средств 320 вращения, обеспечивающих вращение тестируемого объекта 200 относительно сферы сети 100 датчиков.
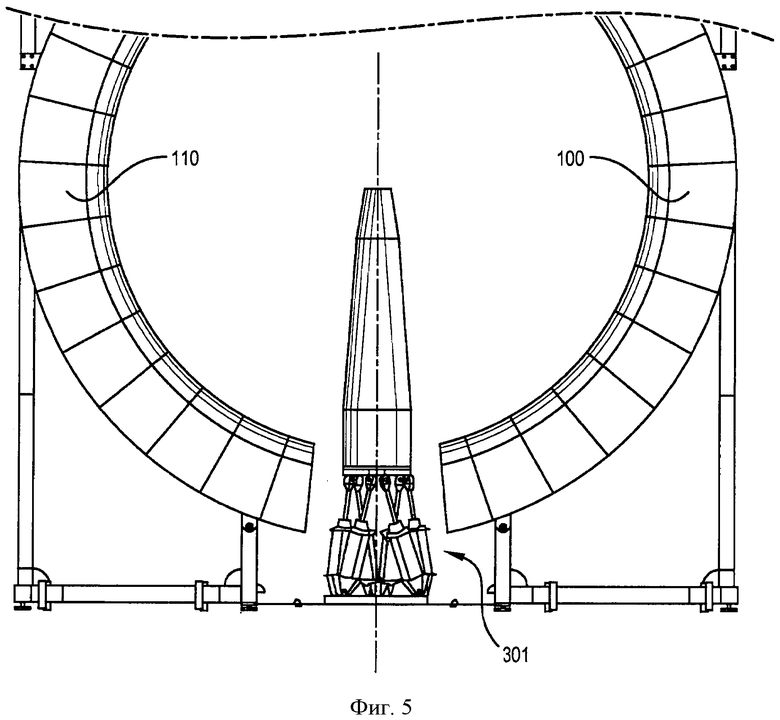
Кроме того, согласно еще одному варианту выполнения устройства 300, показанному на фиг.5, средства 301 относительного перемещения со скольжением тестируемого объекта 200 и сети 100 датчиков могут быть выполнены при помощи набора из 6 механических силовых цилиндров, называемого также шестиногой опорой, позволяющего получать криволинейный ход, эквивалентный ходу, получаемому при помощи средств 301 перемещения со скольжением, показанных на фиг.4, сохраняя при этом ориентацию оси средств 320 вращения перпендикулярно к криволинейному ходу скольжения. Преимуществом этого варианта осуществления изобретения является возможность полного изменения конфигурации для адаптации к любому радиусу сферы 110 сети 100 датчиков. Кроме того, это решение обеспечивает также легкую регулировку высоты стойки 201, на которой устанавливают тестируемый объект. Кроме того, оно позволяет реализовать разные варианты криволинейных путей и дает возможность цифрового программирования криволинейных путей скольжения, а также осуществления в реальном времени коррекции траектории, например, при помощи лазера, измеряющего в реальном времени положение стойки 201 или положение тестируемого объекта 200.
Кроме того, в варианте выполнения устройства 300, показанного на фиг.1-4, сеть 100 датчиков выполнена подвижной и установлена на средстве 300 позиционирования, не содержащем средств 320 вращения, тогда как тестируемый объект 200 устанавливают на опоре 321 на средствах 320 вращения, не связанных со средствами 301 перемещения со скольжением, и сохраняют неподвижную главную ось вращения.
Кроме того, в варианте выполнения средства 300, показанного на фиг 1-4, тестируемый объект 200 является подвижным и установлен на средстве 300 позиционирования, не содержащем средств 320 вращения, тогда как сеть 100 датчиков устанавливают на опоре 321 на средствах 320 вращения, отсоединенных от средств 301 перемещения со скольжением, и сохраняют неподвижную главную ось вращения.
2. Дополнительная дискретизация в трех измерениях
Средство 300 относительного позиционирования тестируемого объекта 200 и сети 100 электромагнитных датчиков позволяет осуществлять дополнительную трехмерную дискретизацию измерений излучаемого поля.
Каждое перемещение со скольжением на направляющих 310, 330 позволяет увеличить число точек измерения излучения вокруг объекта и, таким образом, осуществлять дополнительную угловую дискретизацию.
Действительно, в результате перемещения со скольжением тестируемого объекта 20 на направляющих 310 и 330 из исходного положения в конечное положение можно смещать в угловом направлении сеть 100 электромагнитных датчиков относительно тестируемого объекта 200, или наоборот, и сканировать, таким образом, несколько относительных положений сети 100 датчиков относительно тестируемого объекта 200.
Таким образом, для каждой плоскости измерения излучения можно получать несколько последовательных рядов точек измерения, соответствующих разным относительным угловым смещениям сети 100 электромагнитных датчиков и тестируемого объекта 200.
В случае сферической сети 100 электромагнитных датчиков эти относительные угловые смещения сети 100 электромагнитных датчиков и тестируемого объекта 200 меньше углового шага сети 100 датчиков.
Средства 301 перемещения со скольжением, описанные выше и предназначенные для обеспечения перпендикулярных угловых перемещений тестируемого объекта 200 и сети 100 электромагнитных датчиков, дают возможность увеличить число точек измерения излучаемого поля в системе сферических координат в случае сферической сети 100 электромагнитных датчиков и осуществлять дополнительную дискретизацию по возвышению.
Что касается средств 320 вращения вокруг главной оси, перпендикулярной к направлениям скольжения, то они позволяют увеличить число точек измерения в азимутальной плоскости или в параллельной с ней плоскости.
Таким образом, к дополнительной дискретизации по возвышению добавляется дополнительная азимутальная дискретизация, что дает возможность увеличить число дискретных точек измерения в трех измерениях по всей сфере измерения, охватывающей тестируемый объект 200.
3. Другие геометрические формы
Изобретение было описано для сферических сетей датчиков. Разумеется, его можно применять для любой другой конфигурации сетей датчиков, в частности для линейных или планарных сетей, для сетей, расположенных на круглой арке или на участке круглой арки, или для сетей, расположенных на сферическом или цилиндрическом куполе.
Например, для планарной сети датчиков средство 300 позиционирования сети 100 датчиков или тестируемого объекта 200 содержит средства 301 перемещения со скольжением, предназначенные для обеспечения линейного скольжения в рамках измерений излучаемого поля в системе планарных координат.
Предпочтительно эти средства 301 перемещения со скольжением выполнены с возможностью перемещения сети 100 датчиков и тестируемого объекта 200 относительно друг друга со смещением, большим или меньшим шага сети 100 датчиков, и для осуществления измерений при нескольких относительных положениях сети 100 датчиков и тестируемого объекта 200.
В этом случае направляющие средства 310 могут быть выполнены в виде двух прямолинейных направляющих 311 и 312, на которых в поперечном направлении установлена перемещаемая площадка 314 позиционирования, выполненная с возможностью установки на ней и фиксирования в регулируемом положении вдоль этих средств тестируемого объекта 200 или сети 100 электромагнитных датчиков.
Движение перемещения со скольжением линейной сети 100 электромагнитных датчиков по направляющим 311 и 312 позволяет увеличить число точек измерения излучения в плоскости измерения излучения, а также увеличить охватываемую геометрическую зону измерения тестируемого объекта 200.
Действительно, перемещение со скольжением со смещением, большим шага сети 100 датчиков, позволяет перекрывать в плоскости измерения излучения геометрическую зону тестируемого объекта, отличную от зоны, исследованной ранее до перемещения со скольжением.
Например, средство 300 позиционирования сети 100 датчиков поступательно перемещают перпендикулярно к сети 100 датчиков перед тестируемым объектом 200, установленным на неподвижном держателе 201 для осуществления измерений в плоскости перед тестируемым объектом.
В другом примере средство 300 позиционирования сети 100 датчиков располагают перед тестируемым объектом 200, который, в свою очередь, закрепляют на стойке 201, установленной на опоре 321, вращаемой средствами 320 относительного вращения тестируемого объекта относительно сети датчиков вокруг оси, параллельной оси датчиков, для осуществления измерения на цилиндре, охватывающем тестируемый объект.
В еще одном примере узел средства 300 позиционирования сети 100 датчиков поворачивают при помощи средств 320 вращения перед тестируемым объектом 200, установленным на неподвижном держателе 201 для осуществления измерений на диске с полярной геометрией перед тестируемым объектом.
В другом варианте выполнения используется сеть 100 датчиков, распределенных на плоской опоре.
В этом случае средства 301 перемещения со скольжением аналогичны средствам перемещения со скольжением, описанным со ссылками на фиг.4, за исключением формы профиля направляющих двух используемых узлов.
Пара направляющих каждого узла имеет прямолинейный профиль, позволяющий средствам 301 перемещения со скольжением осуществлять линейное перемещение сети 100 датчиков или тестируемого объекта 200 в двух перпендикулярных направлениях, образующих плоскость сети датчиков.
Разумеется, это описание можно распространить на случай измерений по сферической или цилиндрической форме.
Следует отметить, что специалист в данной области может успешно применять средство 300 относительного позиционирования сети 100 датчиков и тестируемого объекта 200, позволяющее увеличить число точек производимых измерений независимо от формы сети 100 датчиков и, следовательно, в случае сферической сети 100 датчиков получает возможность осуществлять дополнительную дискретизацию в трех измерениях по всей сфере измерения, охватывающей тестируемый объект 200.
Кроме того, специалист может успешно применять средство 300 относительного позиционирования сети 100 датчиков и тестируемого объекта 200, позволяющее исследовать более значительную геометрическую зону измерения тестируемого объекта 200 относительно используемой сети 100 датчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОЙ ВЕЛИЧИНЫ, ХАРАКТЕРИЗУЮЩЕЙ ЭЛЕКТРОМАГНИТНОЕ ИЗЛУЧЕНИЕ ИССЛЕДУЕМОГО ОБЪЕКТА | 2009 |
|
RU2510511C2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО ИСПЫТАНИЯ ОБЪЕКТА | 2011 |
|
RU2582892C2 |
| СКВАЖИННЫЙ ЦЕНТРАТОР (ВАРИАНТЫ) | 2019 |
|
RU2773827C1 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИПОЛЬНОГО МАГНИТНОГО МОМЕНТА ОСТАТОЧНОЙ НАМАГНИЧЕННОСТИ И ТЕНЗОРА МАГНИТНОЙ ПОЛЯРИЗУЕМОСТИ ОБЪЕКТА И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2744817C1 |
| СКАНЕР ДЛЯ ЛИДАРНОЙ СИСТЕМЫ, ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ СКАНЕРА | 2020 |
|
RU2781619C2 |
| Лидарные системы и способы | 2020 |
|
RU2798363C2 |
| Лидарные системы и способы | 2020 |
|
RU2798364C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ЭЛЕКТРОМАГНИТНОГО ИСПЫТАНИЯ ОБЪЕКТА | 2011 |
|
RU2573122C2 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |
Изобретение относится к средствам относительного позиционирования сети электромагнитных датчиков и тестируемого объекта. Средство (300) относительного позиционирования сети (100) электромагнитных датчиков и тестируемого объекта (200), характеризующееся тем, что содержит средства (301) относительного перемещения тестируемого объекта (200) и сети (100) электромагнитных датчиков с по меньшей мере двумя степенями свободы, при этом указанные средства (301) включают в себя средства (301) перемещения со скольжением, выполненные с возможностью перемещения либо объекта (200), либо сети (100) датчиков, причем указанные средства (301) перемещения со скольжением содержат первый направляющий узел, расположенный в первом направлении скольжения, на котором установлена первая перемещаемая площадка (314), и второй направляющий узел, расположенный во втором направлении скольжения, перпендикулярном к первому направлению, на котором установлена вторая перемещаемая площадка (334), причем это относительное перемещение позволяет увеличить число точек измерения по этим двум степеням свободы, чтобы осуществить дополнительную пространственную дискретизацию при помощи сети (100) датчиков во время измерения излучаемого поля вокруг или перед объектом (200). Технический результат заключается в увеличении числа дискретных точек измерения. 2 н. и 14 з.п. ф-лы, 5 ил.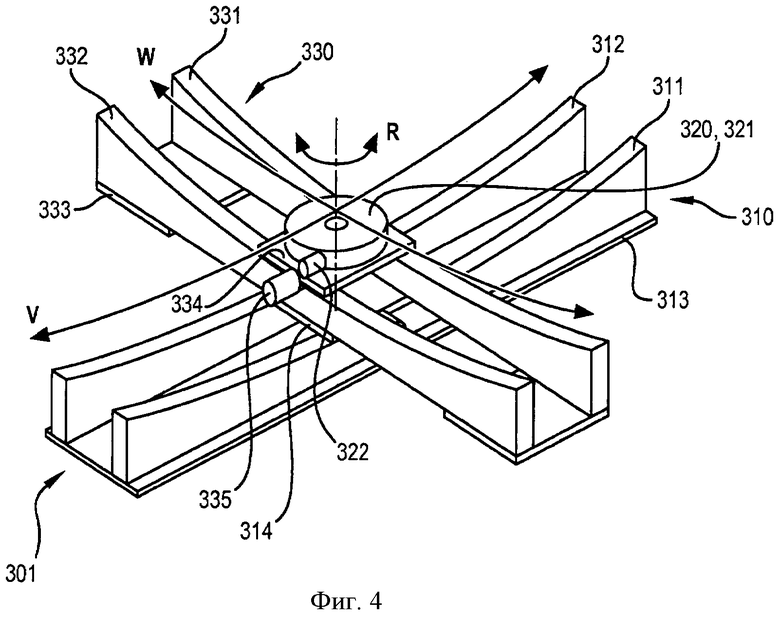
1. Средство (300) относительного позиционирования сети (100) электромагнитных датчиков и тестируемого объекта (200), характеризующееся тем, что содержит средства (301) относительного перемещения тестируемого объекта (200) и сети (100) электромагнитных датчиков с по меньшей мере двумя степенями свободы, при этом указанные средства (301) включают в себя средства (301) перемещения со скольжением, выполненные с возможностью перемещения либо объекта (200), либо сети (100) датчиков, причем указанные средства (301) перемещения со скольжением содержат первый направляющий узел, расположенный в первом направлении скольжения, на котором установлена первая перемещаемая площадка (314), и второй направляющий узел, расположенный во втором направлении скольжения, перпендикулярном первому направлению, на котором установлена вторая перемещаемая площадка (334), причем это относительное перемещение позволяет увеличить число точек измерения по этим двум степеням свободы, чтобы осуществить дополнительную пространственную дискретизацию при помощи сети (100) датчиков во время измерения излучаемого поля вокруг или перед объектом (200).
2. Средство по п.1, характеризующееся тем, что средства (301) относительного перемещения тестируемого объекта (200) и сети (100) электромагнитных датчиков имеют третью степень свободы, которую можно использовать для дополнительной дискретизации или для наблюдения объекта с разных точек обзора.
3. Средство по п.1, характеризующееся тем, что содержит средства (320) относительного вращения тестируемого объекта (200) и сети (100) датчиков вокруг главной оси вращения.
4. Средство по п.3, характеризующееся тем, что средства (320) вращения независимы от средств (301) перемещения со скольжением.
5. Средство по п.3, характеризующееся тем, что средства (301) перемещения со скольжением и средства (320) вращения находятся одно над другим.
6. Средство по любому из пп.1-5, характеризующееся тем, что вторая перемещаемая площадка (314) предназначена для установки на ней либо тестируемого объекта (200), либо сети (100) электромагнитных датчиков.
7. Средство по п.1 или 2, характеризующееся тем, что содержит средства вращения вокруг оси, перпендикулярной первому и второму направляющим узлам.
8. Средство по п.3, характеризующееся тем, что содержит набор силовых цилиндров и/или электрических приводов, выполненных для реализации всех движений перемещения со скольжением и/или вращения.
9. Средство по п.8, характеризующееся тем, что содержит средства для цифрового программирования движений перемещения со скольжением и/или вращения.
10. Средство по п.8, характеризующееся тем, что содержит набор силовых цилиндров, расположенных в виде шестиногой опоры.
11. Средство по любому из пп.8-10, характеризующееся тем, что содержит оптические средства обнаружения для коррекции движения в режиме реального времени.
12. Средство по п.1, характеризующееся тем, что первый и второй направляющие узлы содержат криволинейный профиль, выполненный с возможностью обеспечения углового перемещения тестируемого объекта вокруг геометрического центра сферы, образованной сетью электромагнитных датчиков.
13. Устройство для определения по меньшей мере одной характеристики электромагнитного излучения тестируемого объекта (200), содержащее сеть (100) электромагнитных датчиков, отличающееся тем, что дополнительно содержит средство (300) относительного позиционирования тестируемого объекта (200) и указанной сети (100) датчиков, включающее в себя средства (301) перемещения со скольжением, выполненные с возможностью перемещения либо объекта (200), либо сети (100) датчиков, при этом указанные средства (301) содержат первый направляющий узел, расположенный в первом направлении скольжения, на котором установлена первая перемещаемая площадка (314), и второй направляющий узел, расположенный во втором направлении скольжения, перпендикулярном первому направлению, на котором установлена вторая перемещаемая площадка (334), причем это относительное перемещение позволяет увеличить число точек измерения по этим двум степеням свободы, чтобы осуществить дополнительную пространственную дискретизацию при помощи сети (100) датчиков во время измерения излучаемого поля вокруг или перед объектом (200).
14. Устройство по п.13, отличающееся тем, что сеть (100) электромагнитных датчиков является сетью датчиков сферической формы.
15. Устройство по п.13, отличающееся тем, что сеть (100) электромагнитных датчиков является сетью датчиков линейной или планарной формы или сетью в виде круглой арки, или участка круглой арки, или в виде сферического купола, или в виде цилиндрического купола.
16. Устройство по п.13, отличающееся тем, что содержит средства (320) относительного вращения тестируемого объекта (200) и сети (100) датчиков вокруг главной оси вращения.
| US 2007018654 A1, 25.01.2007 | |||
| JP 2006258759 A, 28.09.2006 | |||
| Преобразователь угловых перемещений в код | 1974 |
|
SU526930A1 |
| EP 1326070 A1, 09.07.2003. | |||

