Изобретение относится к технике ближней радиолокации, а именно к методам обнаружения нелинейно-рассеивающих объектов, содержащих нелинейные резисторные элементы.
Множество таких объектов можно разбить на две группы:
- RLC-объекты, модель которых в виде эквивалентной электрической цепи помимо безынерционных нелинейных резисторов (R) содержит и инерционные элементы - индуктивные (L) и/или емкостные (С). Такими объектами являются мобильные телефоны, электронные подслушивающие устройства, приемные устройства радиоуправляемых взрывателей и т.п.;
- R-объекты, в эквивалентных электрических схемах которых можно пренебречь влиянием индуктивных и емкостных элементов. Типичными представителями R-объектов являются элементы стальных конструкций, сварные или клепанные, подверженных коррозии и ржавчине.
В предложенном способе решается задача обнаружения именно RLC-объектов на фоне потока отраженных сигналов от R-объектов, причем предполагается, что вольт-амперная характеристика резисторного элемента имеет четную, например, квадратичную парциальную составляющую.
Известны способы нелинейной радиолокации, сущность которых изложена в [1; 2].
Недостаток аналогов [1] состоит в высоком уровне ложных тревог, создаваемых потоком ложных сигналов от R-объектов. Последнее связано с тем, что, несмотря на использование в [1] сложного зондирующего сигнала в виде нескольких гармоник с последующим выделении из отраженного сигнала набора кратных и комбинационных частот, в [1] оцениваются лишь энергетические характеристики выделенных частот, информативных свойств которых недостаточно для решения задачи распознавания RLC-объектов и их селекции на фоне потока сигналов от R-объектов. В определенной мере такими свойствами обладает аналог [2], однако его недостатком является необходимость варьирования мощности излучаемой гармоники.
Среди аналогов наиболее близким по числу совпадающих признаков является способ нелинейной радиолокации [1], в котором облучение искомого объекта производится тремя гармониками с частотами ω0, ω1, ω2 соответственно, а приемник радиолокатора выделяет из отраженного сигнала три сигнала r0, r1, r2 с несущими частотами 2ω0, ω0+ω1, ω0+ω2 соответственно.
Недостаток прототипа состоит в низкой эффективности обнаружения RLC-объектов на фоне потока сигналов от R-объектов.
Целью изобретения является повышение эффективности обнаружения RLC-объектов.
Для достижения поставленной цели в способе-прототипе, заключающемся в генерации и излучении трех гармонических сигналов с частотами ω0, ω1, ω2 и комплексными амплитудами G0, G1, G2 соответственно, приеме отраженного сигнала и выделении из него трех сигналов r0, r1, r2 с несущими частотами 2ω0, ω0+ω1, ω0+ω2 соответственно, формировании выходного сигнала радиолокатора и сравнении его с порогом, дополнительно осуществляется выбор частот ω1 и ω2 из условия ω1=ω0+Ω и ω2=ω0-Ω, выбор одинаковых отношений G1/G0 и G2/G0, совместная корреляционная обработка пар сигналов {r1, r0}, и {r2, r0} с формированием соответствующих корреляционных сигналов S1 и S2, определение амплитуды UΔ разностного SΔ=S1-S2 и амплитуды UΣ суммарного SΣ=S1+S2 сигналов, причем в качестве выходного сигнала радиолокатора выбирается UΔ, если отношение G1/G0=G2/G0 является действительной величиной, или UΣ, если отношение G1/G0=G2/G0 является мнимой величиной.
На фиг.1 изображена возможная схема нелинейного радиолокатора, реализующего предложенный способ, элементами которой являются: 1 - синтезатор частот, вырабатывающий три гармонических сигнала g0(t), g1(t), g2(t) с круговыми частотами ω0, ω0+Ω ω0-Ω; 2 - усилители мощности; 3 - сумматор; 4 - приемник отраженных сигналов в полосе частот (2ω0-Ω; 2ω0+Ω); 50, 51, 52 - высокочастотные фильтры с центральными круговыми частотами 2ω0, 2ω0+Ω; 2ω0-Ω, выделяющие сигналы r0(t), r1(t), r2(t) соответственно; 61, 62 - балансные преобразователи частоты с фильтрами частоты Ω на их выходах, формирующие сигналы S1 и S2 соответственно; 7 - разностное или суммарное устройство, в зависимости от того, какой вид зондирующего сигнала используется - с амплитудной или фазовой модуляцией; 8 - амплитудный детектор с низкочастотным фильтром, постоянная времени которого ~ 2 л/ Q, и пороговая схема.
Излучаемые гармонические сигналы g0(t), g1(t), g2(t) имеют вид:
где совокупность комплексных амплитуд G0, G1, G2 является спектром суммарного сигнала g0(t)+g1(t)+g2(t), j - мнимая единица. Уточним их амплитудно- и фазочастотные характеристики. Амплитуды G1 и G2 боковых частот ω0±Ω выберем одинаковыми:

а их отношение G/G0 к амплитуде G0 центральной частоты ω0 спектра равными либо чисто действительной величине:

либо чисто мнимой величине:

где скобки |…| обозначают взятие модуля комплексного числа.
Вид суммарного сигнала в этих двух случаях будет различным. В случае выполнения условий (2), (3) суммарный сигнал относится к классу амплитудно-модулированных (AM) сигналов с частотой тональной модуляции Ω (Ω<<ω0). В случае выполнения условий (2), (4) суммарный сигнал близок по форме к фазомодулированным (ФМ) сигналам, но в строгом смысле не относящийся к ним, т.к. имеет дополнительную амплитудную модуляцию. Вместе с тем, в дальнейшем для краткости такой сигнал будем называть ФМ-сигналом. Способы формирования колебаний g0(t), g1(t), g2(t), комплексные амплитуды которых подчиняются условиям (2), (3) или (2), (4), известны. В частности, эти колебания можно выделить с помощью высокочастотных фильтров из AM- и строго ФМ-сигналов, полученных традиционными методами модуляции амплитуды или фазы гармонического сигнала частоты ω0. В случае использования трех независимых генераторов гармонических сигналов с частотами ω0, ω0+Ω и ω0-Ω нужные соотношения - (2), (3) или (2), (4) можно обеспечить путем регулировки амплитуд этих колебаний и подстройки фазы генератора центральной частоты ω0 с помощью фазосдвигающей цепочки, производимой после каждого включения радиолокатора.
Интересующую нас парциальную составляющую отраженного сигнала, сосредоточенную в полосе частот 2ω0±Ω и выделяемую на выходе приемника, представим в виде суммы трех сигналов r0(t), r1(t), r2(t):

где ψ - случайная начальная фаза и τ - задержка принимаемого сигнала, обусловленные пространственной удаленностью объекта радиолокации. Комплексные амплитуды R0, R1, R2, представляющие спектр суммарного сигнала r0(t)+r1(t)+r2(t), характеризуют отражающие свойства нелинейно-рассеивающего объекта и обладают различными свойствами при наблюдении R-объектов и RLC-объектов.
Если R-объект облучается АМ-сигналом или ФМ-сигналом, то суммарный сигнал r0(t)+r1(t)+r2(t) остается в классе тонально модулированных AM- или ФМ-сигналов соответственно. В спектральной интерпретации это означает следующее: если отношение G/G0 - действительная (или мнимая) величина, то отношения R1/R0 и R2/R0 также являются действительными (или мнимыми) величинами с выполнением равенства R1=R2=R, что аналогично условиям (2), (3) (или (2), (4)).
При наблюдении RLC-объектов отношения спектральных амплитуд R1/R0 и R2/R0 перестают быть чисто действительными или чисто мнимыми величинами, для них перестает выполняться равенство R1=R2 и их можно рассматривать как случайные процессы со временем корреляции, зависящим от степени инерционности RLC-объекта и глубины модуляции зондирующего сигнала, определяемой модулем отношения G/G0≤0,5.
Введем сигналы S1 и S2 с несущей частотой Ω, сущность которых - это коэффициенты корреляции для пар отраженных колебаний r1(t), r0(t) и r2(t), r0(t) соответственно:

где скобки <…> обозначают усреднение по времени. Определим разностный SΔ(t) и суммарный SΣ(t) сигналы равенствами:

Из вышеизложенного следует, что при облучении R-объектов АМ-сигналом нулевое значение принимает разностный сигнал SΔ(t), а при облучении ФМ-сигналом - суммарный сигнал SΣ(t). В то же время при облучении RLC-объектов AM- или ФМ-сигналом амплитуда UΔ разностного SΔ(t) и амплитуда UΣ суммарного SΣ(t) сигналов принимают ненулевые значения. Поэтому задача обнаружения RLC-объектов трансформируется в задачу оценки амплитуды UΔ разностного сигнала SΔ(t) или амплитуды UΣ суммарного сигнала SΣ(t) при использовании AM- или ФМ-сигнала соответственно в качестве зондирующего.
Источники информации
1. Беляев В.В., Маюнов А.Т., Разиньков С.Н. Состояние и перспективы развития «нелинейной» радиолокации. Успехи современной радиолокации, 2002 г., №6, с.59-78.
2. Решение от 04.12.2012 г. о выдаче патента на изобретение по заявке №2011147575/07(071363) от 24.11.2011 г. «Способ радиолокации нелинейно-инерционных объектов».
Изобретение относится к методам и средствам радиолокации нелинейно-рассеивающих объектов. В качестве зондирующего сигнала используются три гармоники с соответствующими частотами. В результате совместной корреляционной обработки пар сигналов {r1, r0} и {r2, r0} определяются корреляционные сигналы S1 и S2 соответственно и формируются разностный SΔ=S1-S2 и суммарный SΣ=S1+S2 сигналы, а в качестве выходного сигнала радиолокатора используется либо амплитуда UΔ разностного сигнала, либо амплитуда UΣ суммарного сигнала в зависимости от выбора начальных фаз у гармоник зондирующего сигнала. Достигаемый технический результат - повышение эффективности обнаружения нелинейных объектов, в состав которых входят инерционные элементы - индуктивности и емкости, на фоне потока сигналов от безынерционных нелинейных объектов. 1 ил.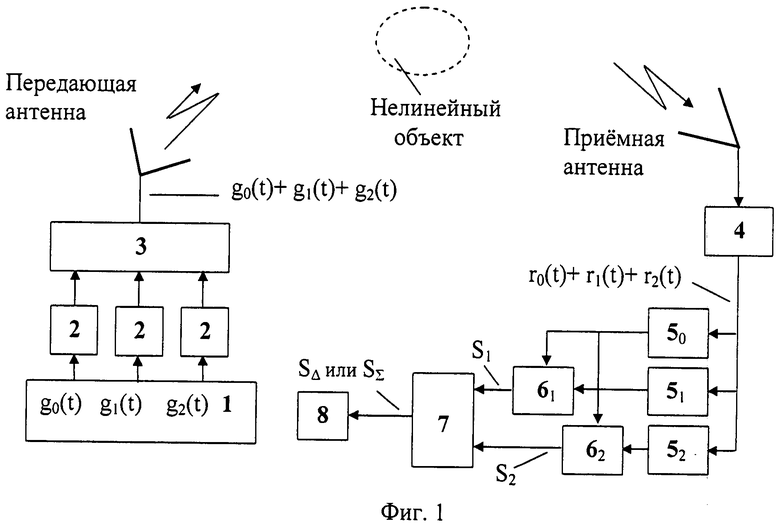
Способ радиолокационного обнаружения объектов с инерционной нелинейностью, заключающийся в генерации и излучении трех гармонических сигналов с частотами ω0, ω1, ω3 и комплексными амплитудами G0, G1, G2 соответственно, приеме отраженного сигнала и выделении из него трех сигналов r0, r1, r2 с несущими частотами 2ω0, ω0+ω1, ω0+ω2 соответственно, отличающийся тем, что дополнительно осуществляется совместная корреляционная обработка пар сигналов {r1, r0}, и {r2, r0} с формированием соответствующих корреляционных сигналов S1 и S2, определение амплитуды U∆ разностного S∆=S1-S2 и амплитуды UΣ суммарного SΣ=S1+S2 сигналов, причем частоты ω1 и ω2 удовлетворяют условиям ω1=ω0+Ω и ω2=ω0-Ω, где Ω - частота тональной модуляции, отношения G1/G0 и G2/G0 выбираются одинаковыми, а в качестве выходного сигнала радиолокатора выбирается либо U∆, если отношение G1/G0=G2/G0 является действительной величиной, либо UΣ, если отношение G1/G0=G2/G0 является мнимой величиной.
| БЕЛЯЕВ В.В | |||
| и др | |||
| Состояние и перспективы развития «нелинейной» радиолокации | |||
| Успехи современной радиолокации, 2002, |

