Изобретение относится к области радиолокации и может быть использовано в загоризонтных радиолокаторах и для исследования состояния воздушного слоя земли.
Известно устройство определения высот ионосферы в зоне обзора, входящее в состав радиолокатора, являющимся загоризонтным, изложенным в патенте №2073881, автор Часовской А.А., бюл. №5 от 20.02.1997 г. В нем синхронизатор выдает команду на формирование зондирующих импульсов импульсному передатчику, которые через антенный переключатель поступают в антенну. Последняя излучает электромагнитную энергию, отражающуюся от ионосферы, и снова поступающую в антенну и далее через вышеупомянутый антенный переключатель в приемник, преобразующий электромагнитную энергию в электрические сигналы. При этом зондирующий импульс может иметь несущую частоту длинноволнового диапазона, необходимую для отражения от ионосферы, а длительность импульса составит, например, 500 мксек. В селекторе по амплитуде и длительности выделяется уровень сигнала с приемника, характерный для ионосферы, и через строго определенное время с момента начала сигнала с приемника выдается импульс для осуществления окончания счета времени в преобразователь дальности. Таким образом обеспечивается определение наименьшей дальности до ионосферы. Импульс начала счета времени поступает с синхронизатора. Информация с выхода преобразователя дальности может поступать в блок вторичной обработки, где так же, используя информацию о направлении отраженных сигналов, определяются высоты ионосферы в зоне обзора. Значение высот отображаются на индикаторе. В последнем и в блоке вторичной обработки используется информация с датчиков азимута и угла моста. Однако для определения многих высот ионосферы в зоне обзора необходимы громоздкие антенные узлы, обеспечивающие высокую разрешающую способность по углам.
Известно устройство определения высот до ионосферы в зоне обзора, входящего в состав загоризонтного радиолокатора, изложенного в книге «Радиоэлектронная промышленность России», 2010 г., г. Москва, ООО ИД «Военный парад», стр.312. В его состав входят те же узлы, что и в вышеупомянутом аналоге. Однако для определения многих высот в зоне обзора также используются громоздкие узлы.
С помощью предлагаемого устройства обеспечивается определение высот в зоне обзора без использования громоздких узлов и с сохранением точности измерений. Достигается это введением вычитателя следующих друг за другом дальностей, дешифратора, блока элементов совпадения, сумматора и датчика половины ширины диаграммы по углу места. При этом группа выходов преобразователя дальности соединена через вычитатель следующих друг за другом дальностей с группой входов дешифратора, имеющего выход, соединенный с входом блока элементов совпадения, имеющего группу входов и выходов, соответственно соединенную с группой выходов датчика угла места и с первой группой входов сумматора, вторая группа входов которого и группа выходов соответственно соединены с группой выходов датчика половины ширины диаграммы по углу места и с первой группой входов блока вторичной обработки.
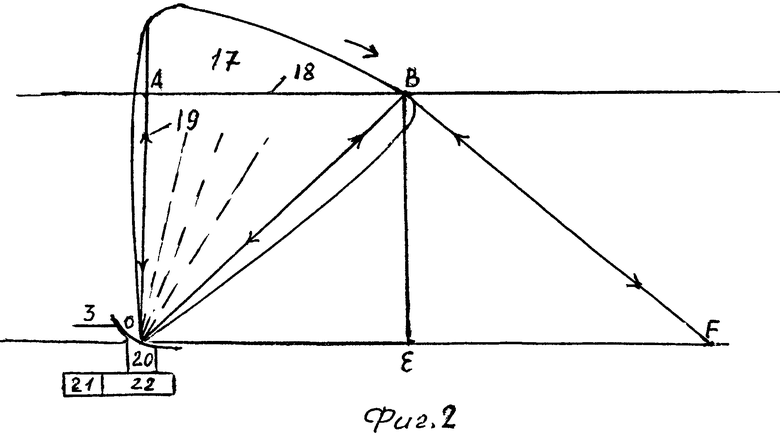
На фиг.1 и в тексте приняты следующие обозначения:
1 - импульсный передатчик
2 - антенный переключатель
3 - антенна
4 - синхронизатор
5 - приемник
6 - датчик угла места
7 - датчик азимута
8 - преобразователь дальности
9 - селектор по амплитуде и длительности
10 - блок элементов совпадения
11 - вычитатель следующих друг за другом дальностей
12 - дешифратор
13 - сумматор
14 - датчик половины ширины диаграммы по углу места
15 - блок вторичной обработки
16 - индикатор,
при этом выход синхронизатора 1 соединен с первым входом преобразователя дальности 8, имеющего второй вход и группу выходов, соответственно соединенные через селектор по амплитуде и длительности 9, через приемник 5 со вторым выходом антенного переключателя 2 и с первой группой входов блока вторичной обработки 15, имеющего группу выходов, соединенную с первой группой входов индикатора 16, имеющего вторую группу входов, соединенную с группой выходов датчика азимута 7, жестко связанного вместе с датчиком угла места 6 с антенной 3, совмещенные вход и выход которой соединены с совмещенными вторым входом и первым выходом антенного переключателя 2, а группа выходов вышеупомянутого преобразователя дальности 8 соединена через вычитатель следующих друг за другом дальностей 11 с группой входа дешифратора 12, имеющего выход, соединенный с входом блока элементов совпадения 10, имеющего группу входов и группу выходов, соответственно соединенные с группой выходов датчика угла места 6 и с первой группой входов сумматора 13, вторая группа входов которого и группа выходов соответственно соединены с группой выходов датчика половины ширины диаграммы по углу места 14 и с первой группой входов блока вторичной обработки 15.
Работа устройства осуществляется следующим образом.
Синхронизатор 4 выдает команду на формирование зондирующих импульсов импульсному передатчику 1, которые через антенный переключатель 2, предотвращающий попадание этих импульсов в приемник 5, поступают в антенну 3 и излучаются в пространство. Отраженная электромагнитная энергия вновь поступает в антенну 3 и далее через вышеупомянутый антенный переключатель 2 в приемник 5, преобразующий электромагнитную энергию в электрические сигналы. При этом зондирующий импульс может иметь несущую частоту длинноволнового диапазона, необходимую для отражения от ионосферы, а длительность импульса может составлять, например, 500 мксек. В селекторе по амплитуде и длительности 9 выделяется уровень сигнала с приемника 5, имеющий амплитуду, характерную для ионосферы и отличную от других амплитуд, и через строго определенное время с момента начала сигнала, необходимое для его фиксации на фоне помех, выдается импульс окончания счета времени в преобразователь дальности 6, определяющий дальность в обрабатываемой зоне до ионосферы 4. Пример конкретного исполнения «селектора по амплитуде и длительности» представлен в книге Хесин «Импульсная техника», 1971 г., стр.152-154. Антенна 3 имеет строго определенную величину ширины диаграммы направленности по углу места и может быть выполнена со значением этой ширины, находящейся в промежутке, например, между сорока и шестьюдесятью градусами, осуществлять вращения с изменением угла места с максимального до значения, например, 45 градусов. Первоначально высоту будет характеризовать расстояние от антенны 3 по вертикали до ионосферы. Однако по мере уменьшения угла места центральной оси антенны 3 минимальная дальность будет увеличиваться на величину, определяемую в вычитателе следующих друг за другом дальностей 11, куда поступают наименьшие дальности с преобразователя дальности 8. И когда разность с вычитателя 11 превысит строго определенную величину, сработает дешифратор 12 и выдаст разрешение блоку элементов совпадения 10 на прохождение информации с датчика угла места 6, жестко связанного с антенной 3, на первую группу входов сумматора 13. При отсутствии разрешения с дешифратора 12 значение высоты характеризуется информацией с преобразователя дальности 8. При наличии же разрешения сработает сумматор 13, на вторую группу входов которого поступит код с датчика половины ширины диаграммы по углу места 14. Поэтому на группе выходов сумматора 13 будет иметь место угломестное направление луча, находящегося на краю диаграммы и равного наименьшему расстоянию до ионосферы. Это направление и наименьшая дальность с преобразователя 8 поступают соответственно на первую и вторую группы входов блока вторичной обработки 15, где на основании соотношения сторон и углов прямоугольного треугольника определяется соответствующая высота ионосферы и расстояние до места, над которым находится измеряемая высота. Эти значения отображаются на индикаторе 16 для каждого азимутального направления. Значения азимута поступают на вторую группу входов индикатора с датчика азимута 7, жестко связанного с антенной 3. Таким образом по мере вращения антенны отображаются все значения высот в зоне обзора. Пример конкретного исполнения блока вторичной обработки представлен, например, в книге «Радиотехнические системы», Пестряков В.П. и др., 1985 г., стр.219. Пример исполнения преобразователя дальности представлен в книге «Справочник-задачник по радиолокации», Васин В.В., Степанов Б.М., 1977 г., стр.214, фиг.9.7.
На фиг.2 показаны расположения диаграммы направленности 17, которая может вращаться с изменением угла места, антенна 3 осуществляет вращение по углу места с помощью привода 20, жестко связанного с станиной 22, вращающейся по азимуту с помощью привода 21. Линия 19 характеризует наименьшее расстояние до ионосферы 18. По мере уменьшения угла места линия 19, находящаяся на краю диаграммы, будет наклоняться вправо и увеличиваться и займет положение OB. Отрезок BE характеризует высоту ионосферы в точке B, а отрезок BF расстояние от ионосферы до поверхности земли OF. При этом OB=BF. Точность определения угла места может составлять 0,5 градуса.
В предлагаемом устройстве благодаря уменьшению габаритов и веса антенны и сокращению количества обрабатывающих узлов создается возможность размещения его на транспортных средствах, например на автомобиле. При этом сохраняется дальность действия и точностные характеристики, что обеспечивает экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАГОРИЗОНТНЫЙ РАДИОЛОКАТОР | 2013 |
|
RU2515610C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИОНОСФЕРЫ | 2012 |
|
RU2510772C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2014 |
|
RU2560524C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |
| РАДИОЛОКАТОР | 1994 |
|
RU2081429C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2279690C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2247408C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2288483C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1997 |
|
RU2115139C1 |
Изобретение может быть использовано в загоризонтных радиолокаторах. Достигаемый технический результат - повышение точности измерения высот и упрощение устройства. Указанный результат достигается за счет того, что заявленное устройство содержит синхронизатор, импульсный передатчик, антенный переключатель, приемник, датчик азимута, датчик угла места, селектор по амплитуде и длительности преобразователя дальности, блок вторичной обработки, индикатор, вычитатель следующих друг за другом дальностей, дешифратор, сумматор, датчик половины ширины диаграммы по углу места и блок элементов совпадения, определенным образом соединенные между собой. 2 ил.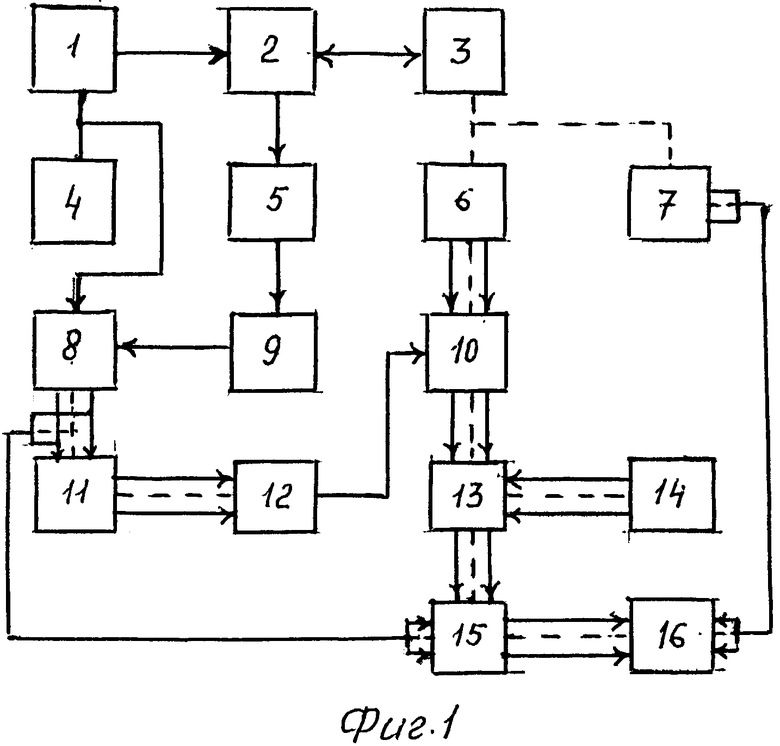
Устройство определения высот ионосферы в зоне обзора, состоящее из синхронизатора, импульсного передатчика, антенного переключателя, приемника, датчика азимута, датчика угла места, селектора по амплитуде и длительности преобразователя дальности, блока вторичной обработки и индикатора, где выход синхронизатора соединен с первым входом преобразователя дальности, второй вход которого через селектор по амплитуде и дальности и приемник соединен с вторым выходом антенного переключателя, при этом группа выходов преобразователя дальности соединена с первой группой входов блока вторичной обработки, имеющего группу выходов, соединенную с первой группой входов индикатора, имеющего вторую группу входов, соединенную с группой выходов датчика азимута, жестко связанного вместе с датчиком угла места с антенной, совмещенные вход и выход которой соединены с совмещенными вторым входом и первым выходом антенного переключателя, имеющего первый вход, соединенный через импульсный передатчик с вышеупомянутым выходом синхронизатора, отличающийся тем, что вводится вычитатель следующих друг за другом дальностей, дешифратор, сумматор, датчик половины ширины диаграммы по углу места и блок элементов совпадения, при этом группа выходов преобразователя дальности соединена через вычитатель следующих друг за другом дальностей с группой входов дешифратора, имеющего выход, соединенный с входом блока элементов совпадения, имеющего группу входов и группу выходов, соответственно соединенные с группой выходов датчика угла места и с первой группой входов сумматора, вторая группа входов которого и группа выходов соответственно соединены с группой выходов датчика половины ширины диаграммы по углу места и с первой группой входов блока вторичной обработки.
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ИОНОСФЕРНОЙ ОШИБКИ ДАЛЬНОСТЕЙ ПО ДВУХЧАСТОТНЫМ ИЗМЕРЕНИЯМ | 2005 |
|
RU2333507C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОННОЙ КОНЦЕНТРАЦИИ В ЗАДАННОЙ ОБЛАСТИ ИОНОСФЕРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251713C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ АТМОСФЕРИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2112251C1 |
| US 20110140955 A1, 16.06.2011 | |||
| US 5428358 A, 27.06.1995 | |||
| US 20120092213 A1, 19.04.2012 | |||

