Изобретение относится к области радиолокации и может быть использовано в радиотехнических системах.
Известен загоризонтный радиолокатор, изложенный в патенте автора №2073881, бюл. №5 от 20.02.1997 г. В нем синхронизатор выдает команду на формирование зондирующих импульсов импульсному передатчику, которые через антенный переключатель поступают в антенну. Последняя излучает электромагнитную энергию, отражающуюся от ионосферы и от объектов. При этом зондирующий импульс может иметь несущую частоту длинноволнового диапазона, необходимую для отражения от ионосферы.
В селекторе по амплитуде и длительности выделяется уровень сигнала с приемника, превышающий минимальный уровень, и через определенное время с момента начала сигнала выделяется импульс для осуществления окончания счета времени в преобразователе дальности, а импульс начала счета времени поступает с синхронизатора. Информация о дальности поступает в блок вторичной обработки. В состав устройства входят датчик угла места и датчик азимута. Все координаты обрабатываются в блоке вторичной обработки и отображаются на индикаторе. Вращение антенны может осуществляться с помощью привода вращения антенны по азимуту, жестко связанного с датчиком азимута, значение которого поступает в блок вторичной обработки. Однако для определения дальности и направления до объектов требуются громоздкие антенные узлы.
Известен загоризонтный радиолокатор, изложенный в книге «Радиоэлектронная промышленность России», 2010 г., г.Москва, ООО ИД «Военный парад», стр.312. В его состав входят те же узлы, что и в вышеупомянутом аналоге. Однако в нем так же используются громоздкие антенные узлы.
С помощью предлагаемого устройства обеспечивается определение дальности и направления до объектов без использования громоздких узлов. Достигается это введением: блока анализа огибающей, двух блоков элементов совпадения, привода вращения антенны по углу места и станины, при этом выход приемника соединен через блок анализа огибающей с входами первого и второго блока элементов совпадения, имеющего группу входов и группу выходов, соответственно соединенные с группой выходов преобразователя дальности и с первой группой входов блока вторичной обработки, вторая группа входов которого соединена с группой выходов первого блока элементов совпадения, имеющего группу входов, соединенную с группой выходов датчика угла места, имеющего жесткую связь с приводом вращения антенны по углу места, жестко связанным с антенной и станиной, имеющей жесткую связь с приводом вращения антенны по азимуту.
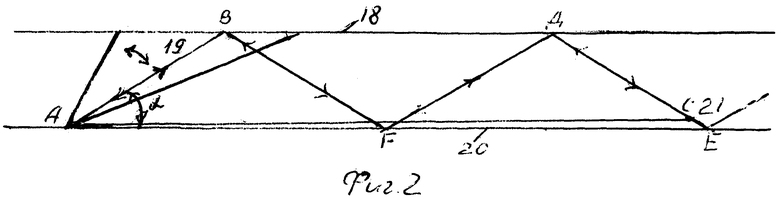
На фиг.1 и в тексте приняты следующие обозначения:
1 - импульсный передатчик
2 - антенный переключатель
3 - антенна
4 - привод вращения антенны по углу места
5 - станина
6 - привод вращения антенны по азимуту
7 - синхронизатор
8 - приемник
9 - датчик угла места
10 - датчик азимута
11 - преобразователь дальности
12 - селектор по амплитуде и длительности
13 - блок элементов совпадения
14 - блок анализа огибающей
15 - блок вторичной обработки
16 - блок элементов совпадения
17 - индикатор, при этом выход синхронизатора 7 соединен с первым входом преобразователя дальности 11 и через импульсный передатчик 1 с первым входом антенного переключателя 2, имеющего второй выход, соединенный через приемник 8, через селектор по амплитуде и длительности 12 со вторым входом преобразователя дальности 11, а также выход приемника 8 соединен через блок анализа огибающей 14 с входами блока элементов совпадения 13 и блока элементов совпадения 16, группа входов и группа выходов которого соответственно соединены с группой выходов преобразователя дальности 11 и с первой группой входов блока вторичной обработки 15, имеющего группу выходов и вторую и третью группы входов, соответственно соединенные с группой входов индикатора 17, с группой выходов блока элементов совпадения 13 и с группой выходов датчика азимута 10, имеющего жесткую связь и с приводом вращения антенны по азимуту 6, жестко связанным со станиной 5, имеющей жесткую связь с приводом вращения антенны по углу места 4, имеющим жесткую связь с датчиком угла места 9, группа выходов которого соединена с группой входов блока элементов совпадения 13 и имеющего жесткую связь с антенной 3, совмещенные вход и выход которой соединены с совмещенными первым выходом и вторым входом антенного переключателя 2.
Работа устройства осуществляется следующим образом.
Синхронизатор 7 выдает команду на формирование зондирующих импульсов импульсному передатчику 1, которые через антенный переключатель 2 поступают в антенну 3, имеющую поле зрения, равное, например, 45 градусов или увеличенное по азимуту и уменьшенное по углу места. Антенна излучает электромагнитную энергию, отражающуюся от ионосферы и от объектов в процессе вращения по углу места и по азимуту. При этом зондирующий импульс может иметь несущую частоту, необходимую для отражения от ионосферы, а отраженная электромагнитная энергия через антенный переключатель 2, предотвращающий попадание излучений от передатчика 1, поступает в приемник 8, где преобразуется в электрический сигнал, поступающий далее в селектор по амплитуде и длительности 12. Последний выделяет уровень сигнала с приемника 8, превышающий минимальный уровень, и через строго определенное время с момента начала сигнала выдает импульс окончания счета времени в преобразователь дальности 11, а импульс начала счета времени поступает с синхронизатора 7. В преобразователе 11 определяется временное рассогласование между импульсом с синхронизатора 7 и импульсом с селектора 12.
Пример конкретного исполнения преобразователя дальности представлен в книге «Справочник-задачник по радиолокации». Васин В.В., Степанов Б.М., 1977 г., стр.214, фиг.9.7.
С выхода приемника электрические сигналы так же поступают в блок анализа огибающей 14, выполняющего функции блока вторичной обработки, где при вращении антенны 3 по углу места в определенном секторе выделяется сигнал, в центре пачки огибающей, соответствующий определенному направлению по углу места. Однако сигнал может быть выделен ближе к краю огибающей. Вращение происходит с помощью привода вращения антенны по углу места 4, жестко связанного с датчиком угла места 9, размещенного на станине 5. При этом станина вращается вместе с приводом 4 и антенной 3 с помощью привода вращения антенны по азимуту 6, жестко связанного с датчиком азимута 10. Вращение может осуществляться в определенном секторе или в режиме кругового обзора. Пример конкретного исполнения блока анализа огибающей представлен в книге «Радиотехнические системы», Ю.М. Казаринов, 1990, стр.383.
На фиг.2 показано распространение электромагнитной энергии, отраженной от объекта 21 в точке С. При этом электромагнитная энергия отражается от ионосферы 18 в точках В и Д и от надводной или земной поверхности 20 в точках F и Е. Однако может быть и большее количество отражений. Следовательно по углу места 2 в зоне диаграммы 19 и времени запаздывания отраженного сигнала от объекта 21 можно определить дальность АС, что и осуществляется в блоке вторичной обработки 15.
При этом на вторую группу входов этого блока 15 поступает код с датчика угла места 9, через блок элементов совпадения 13 при наличии сигнала с блока анализа огибающей 14. На первую же группу входов блока 15 поступает код с преобразователя дальности 11, через блок элементов совпадения 16 при наличии импульса разрешения с блока 14. Если же сигнал выделен не в центре огибающей, то в блоке 15 учитывается поправка по углу места из-за смещения сигнала. А на третью группу входов блока 15 поступает код азимута с датчика азимута 10. Блок вторичной обработки 15, кроме того, осуществляет построение траектории движения объектов и выдает значения трех координат со своей группы выходов на группу входов индикатора 17 для отображения.
Пример конкретного исполнения блока вторичной обработки представлен в книге «Радиотехнические системы». Пестряков В.П. и др., 1985 г., стр.219. Предлагаемое устройство может быть использовано для определения координат до удаленных космических воздушных и надводных объектов, а также до объектов в зоне диаграммы без использования громоздких антенных узлов ввиду отсутствия узконаправленных диаграмм направленности. Он также создает возможность разместить изделие на подвижных носителях. Таким образом устройство эффективно в навигационных целях и в системах управления за воздушным движением. Следовательно, обеспечивается экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТ ИОНОСФЕРЫ В ЗОНЕ ОБЗОРА | 2012 |
|
RU2510882C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИОНОСФЕРЫ | 2012 |
|
RU2510772C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2014 |
|
RU2560524C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| РАДИОЛОКАТОР | 1994 |
|
RU2081429C1 |
| СИСТЕМА РАДИОСВЯЗИ | 2013 |
|
RU2545513C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2009 |
|
RU2413241C1 |
| ОПТИКО-ЛОКАЦИОННОЕ УСТРОЙСТВО | 2013 |
|
RU2518533C1 |
Загоризонтный радиолокатор предназначен для определения дальности и направления на объекты. Достигаемый технический результат - уменьшение габаритов за счет исключения громоздких узлов. Указанный результат достигается благодаря введению блока анализа огибающей, двух блоков элементов совпадения, привода вращения антенны по углу места и станины, при этом выход приемника соединен через блок анализа огибающей с входами первого и второго блока элементов совпадения, имеющего группу входов и группу выходов, соответственно соединенных с группой выходов преобразователя дальности и с первой группой входов блока вторичной обработки, вторая группа входов которого соединена с группой выходов первого блока элементов совпадения, имеющего группу входов, соединенную с группой выходов датчика угла места, имеющего жесткую связь с приводом вращения антенны по углу места, жестко связанным с антенной и станиной, имеющей жесткую связь с приводом вращения антенны по азимуту. 2 ил.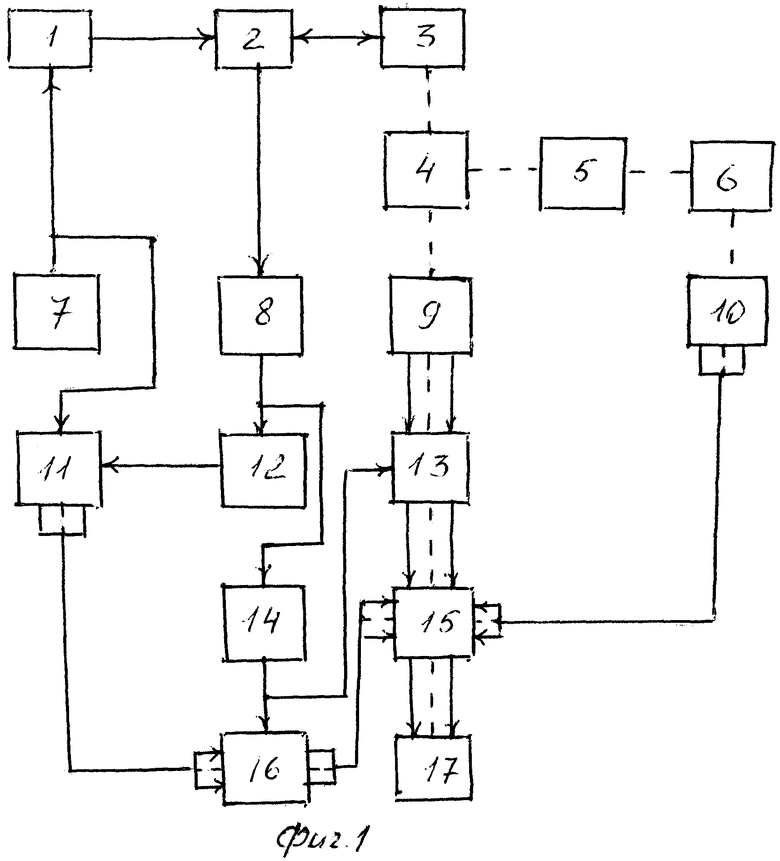
Загоризонтный радиолокатор, состоящий из импульсного передатчика, антенного переключателя, антенны, привода вращения антенны по азимуту, датчика азимута датчика угла места, приемника, селектора по амплитуде и длительности, синхронизатора, преобразователя дальности, блока вторичной обработки и индикатора, где выход синхронизатора соединен с первым входом преобразователя дальности, имеющего второй вход, соединенный через селектор по амплитуде и длительности через приемник со вторым выходом антенного переключателя, имеющего первый вход и совмещенные второй вход и первый выход, соответственно соединенные через импульсный передатчик с вышеупомянутым выходом синхронизатора и с совмещенными первым выходом и входом антенны, а привод вращения антенны по азимуту жестко связан с датчиком азимута, имеющего группу выходов, соединенную с третьей группой входов блоков вторичной обработки, группа выходов которого соединена с группой входов индикатора, отличающийся тем, что вводится блок анализа огибающей, два блока элементов совпадения, привод вращения антенны по углу места и станина, при этом выход приемника соединен через блок анализа огибающей с входами первого и второго блока элементов совпадения, имеющего группу входов и группу выходов, соответственно соединенные с группой выходов преобразователя дальности и с первой группой входов блока вторичной обработки, вторая группа входов которого соединена с группой выходов первого блока элементов совпадения, имеющего группу входов, соединенную с группой выходов датчика угла места, имеющего жесткую связь с приводом вращения антенны по углу места, жестко связанным с антенной и станиной, имеющей жесткую связь с приводом вращения антенны по азимуту.
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |
| ТЕРКА ДЛЯ СВЕКЛЫ | 1933 |
|
SU38509A1 |
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ, КОМПЛЕКС РЛС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2150716C1 |
| EP 1601989 A1, 07.12.2005 | |||
| US 6456229 B2, 24.09.2002 | |||
| US 4417248 A, 22.11.1983 | |||
| US 5923285 A, 13.07.1999 | |||
| WO 2004011955 A2, 05.02.2004 | |||

