Изобретение относится к области локационной техники и может быть использовано в радиотехнических системах. Известно устройство обработки локационных сигналов, изложенное в книге Ю.М. Казаринова «Радиотехнические системы», М., Высшая школа, 1990 г., стр.195. В нем осуществляется преобразование отраженной от объектов электромагнитной энергии в электрическую и выделение сигналов по соответствующим характеристикам.
Прием сигналов может осуществляться с помощью антенны. В преобразователе дальности определяется временное рассогласование между синхроимпульсом с синхронизатора и выделенным сигналом, характеризующий дальность до объекта, которая отображается на индикаторе, на соответствующих азимутах и углах места, формируемых датчиком азимута и угла места. Однако точность определения угловых координат не всегда достаточна.
Известно устройство обработки локационных сигналов, изложенное в патенте №2288483 (автор А.А.Часовской, БЮЛ №33 от 27.11.2006 г.). В нем, в отличие от вышеупомянутого устройства, вводится телевизионный координатор, блок вторичной обработки и блок из двух сумматоров. В блок вторичной обработки поступают азимутальные и угломестные координаты с телевизионного координатора и осуществляется для обеспечения многоцелевого сопровождения, сравнение дальностей с преобразователя дальности и телевизионных средств, определяющих дальность.
При этом происходит отождествление информации о дальности, принадлежащих одним и тем же объектам, но отличающихся друг от друга на величины, не превышающие строго определенного значения. Причем центральные оси телевизионного координатора и антенны совпадают. Таким образом, каждой азимутальной и угломестной координате с телевизионного координатора соответствует определенная дальность с преобразователя дальности. Прием локационных сигналов может осуществляться с помощью антенны, жестко связанной с телевизионным координатором. Поэтому, после поступления информации о дальности с преобразователя дальности, блок вторичной обработки выдает информацию об азимутальной и угломестной координате в блок из двух сумматоров. Причем в первый сумматор поступает азимутальная координата, а во второй - угломестная. В первый и второй сумматоры соответственно поступает информация об азимуте и угле места с датчика азимута и угла места. Координатор может работать в инфракрасном режиме, увеличивая дальность действия. Таким образом, в индикатор для отображения поступают данные об азимутах и углах места всех объектов, находящихся в поле зрения телевизионного координатора. Одновременно на индикаторе вместе с поступлением угломестной и азимутальной координаты соответствующего объекта фиксируется и дальность до него.
Однако для отождествления информации о дальности до воздушных и космических объектов необходимо использование громоздких телевизионных средств, определяющих дальность до подвижных объектов базовым методом. Последние не могут определить дальность до удаленных объектов. С помощью предлагаемого устройства уменьшается его громоздкость без уменьшения точности определения угловых координат и дальности до многих удаленных объектов.
Достигается это использованием антенны, обеспечивающей моноимпульсную обработку, а также введением моноимпульсного измерителя координат, блока автосопровождения по направлению и элемента ИЛИ, при этом выход антенны, обеспечивающей моноимпульсную обработку, соединен с входом моноимпульсного измерителя координат, имеющего группу выходов, соединенную с группой входов элемента ИЛИ и с четвертой группой входов блока вторичной обработки, имеющего вторую и третью группы входов, соответственно соединенные через блок автосопровождения по направлению с первой и второй группами выходов телевизионного координатора, и имеющим третью группу выходов, соединенную с третьей группой входов индикатора, а выход элемента или соединен со вторым входом преобразователя дальности.
На фиг.1 и в тексте приняты следующие обозначения.
1. Антенна, обеспечивающая моноимпульсную обработку.
2. Синхронизатор.
3. Элемент ИЛИ.
4. Моноимпульсный измеритель координат.
5. Преобразователь дальности.
6. Блок вторичной обработки.
7. Блок из двух сумматоров.
8. Индикатор.
9. Телевизионный координатор.
10. Блок автосопровождения по направлению.
11. Датчик азимута и угла места.
При этом антенна, обеспечивающая моноимпульсную обработку 1, жестко связана с телевизионным координатором 9, а ее выход соединен с входом моноимпульсного измерителя координат 4, имеющего группу выходов, соединенную с группой входов элемента или 3, имеющего выход, соединенный со вторым входом преобразователя дальности 5, имеющего первый вход и группу выходов, соответственно соединенные с выходом синхронизатора 2 и с первой группой входов блока вторичной обработки 6, имеющего вторую, третью и четвертую группы входов и первую, вторую и третью группы выходов, соответственно соединенные через блок автосопровождения по направлению 10 с первой и второй группой выходов телевизионного координатора 9, с вышеупомянутой группой выходов моноимпульсного измерителя координат 4, с первой и второй группами входов блока из двух сумматоров 7 и с третьей группой входов индикатора 8, первая и вторая группы входов которого соединены с первой и второй группами входов блока из двух сумматоров 7, имеющего третью и четвертую группы входов, соответственно соединенные с первой и второй группами выходов датчика азимута и угла места 11.
Устройство работает следующим образом.
Отраженная от объекта электромагнитная энергия поступает в антенну, обеспечивающую моноимпульсную обработку 1. Осуществляется это благодаря определенному движению луча или наличию пересекающихся лучей, например, так, как показано в книге «Радиотехнические системы», Ю.М.Казаринов, 1990 г., стр.384, 403-413. Выход антенны 1 соединен с входом моноимпульсного измерителя координат 4, определяющего методом соотношения амплитуд электрических сигналов, преобразованных из электромагнитных, положение объектов относительно центральной оси рабочей зоны антенны, в процессе многоцелевого слежения за объектами, в том числе и при или работе на проходе, например, так, как показано в патенте автора №2421749 от 17.03.2010 г. под названием «Устройство определения направления», поступающее на четвертую группу входов блока вторичной обработки 6 и на группу входов элемента ИЛИ 3. В результате с выхода этого элемента сигнал поступает на первый вход преобразователя дальности 5, имеющий второй вход, соединенный с выходом синхронизатора 2. В преобразователе 5 определяется временное рассогласование между синхроимпульсом с синхронизатора и сигналом элемента ИЛИ 3, характеризующее дальность, которая поступает на первую группу входов блока вторичной обработки 6, куда также на вторую и третью группы входов поступают угловые координаты объектов с блока автосопровождения по направлению принимающего эти координаты с телевизионного координатора 9. Последний может работать и в инфракрасном диапазоне, и осуществлять преобразование световой энергии в электрические сигналы и выделение видеосигналов, характерных для объектов, при осуществлении строчной и кадровой развертки. Причем поле зрения телевизионного координатора одинаково направлено с рабочей зоной антенны 1, которая жестко связана с этим координатором 9. Блок автосопровождения 10 выполняет функции блока вторичной обработки. Таким образом, обеспечивается одновременное поступление информации в блок 6 и отождествления в нем азимутальной координаты от моноимпульсного измерителя 4 с азимутальной координатной от блока автосопровождения по направлению 10, которая определяется с увеличенной точностью. Причем азимутальные координаты могут отличаться друг от друга на значение, не превышающее строго определенную величину. То есть каждому значению азимутальной координаты с блока 4 соответствует определенная азимутальная и угломестная координата с блока 10. Однако если с блока 4 поступают одновременно две координаты, то возможно сравнение и угломестной координаты. Блок 6 осуществляет также построение траекторий движения целей и выдает значения азимутальных и угломестных координат объектов, обнаруженных телевизионным координатором 9 и соответствующую дальность, фиксируемую преобразователем дальности 5 соответственно на первую и вторую группы входов блока из двух сумматоров 7 и на третью группу входов индикатора 8. Причем в первый сумматор блока 7 на третью его группу входов поступает информация об азимуте с первой группы выходов датчика азимута и угла места 11, а на второй сумматор блока 7, на четвертую его группу входов поступает информация об угле места со второй группы выходов датчика 11. Таким образом, в сумматорах осуществляется сложение координат центральной оси рабочей зоны антенны 1, совмещенный с центральной осью координатора 9 с координатами объектов, фиксируемых этим телевизионным координатором и суммы поступают с первой и второй групп выходов блока 7 на первую и вторую группы входов индикатора 8, где они отображаются вместе со значением дальности до объекта с блока 6. При этом точность определения угловых координат выше, чем определенных с помощью моноимпульсного измерителя 4. Поэтому при обнаружении и слежении за объектами в зоне оптической видимости увеличивается точность определения угловых координат без использования дополнительных громоздких узлов в телевизионных средствах. Увеличению точностных характеристик также способствует многоцелевое сопровождение в блоке автосопровождения по направлению.
При отсутствии информации с блоков 4, 5 или 10 блок 6 продолжает выдавать данные о координатах в блоки 7 и индикатор 8, продолжая осуществлять построение траекторий инерционным методом. В этом случае устройство может работать, только принимая радиолокационную или телевизионную информацию. Для увеличения чувствительности может быть использовано несколько телевизионных координаторов, общее поле зрения которых равно полю зрения телевизионного координатора 9.
В зависимости от характера движения луча в антенне, может быть использована одна или большее количество диаграмм. Координатор 9 может работать и в инфракрасном режиме. При этом увеличивается дальность его действия и может быть использовано определенное количество инфракрасных приемных ячеек, каждое из которых сориентировано на определенное направление, а общая величина поля зрения рабочей зоны может составлять, например, 20 градусов. Предлагаемое устройство может работать в режиме кругового или секторного обзора, а также в режиме слежения, в том числе и за космическими объектами, в частности за кометами и метеоритами. При этом определяются дальности и угловые координаты с увеличенными точностными характеристиками до многих удаленных объектов, находящихся в поле зрения координатора. Пример конкретного исполнения преобразователя дальности представлен к книге «Справочник-задачник по радиолокации», Васин В.В., Степанов Б.Н., 1977 г., стр.214. Пример конкретного исполнения телевизионного координатора представлен в книге Барсуков и др. «Телевизионные системы летательных аппаратов», 1979 г., стр.237. - Пример конкретного исполнения блока вторичной обработки представлен в книге «Радиотехнические системы», Пестряков В.П. и др., 1985 г., стр.219.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЛОКАЦИОННОЕ УСТРОЙСТВО | 2013 |
|
RU2518533C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2288483C1 |
| ТРЕХКООРДИНАТНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2510889C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2507528C1 |
| УСТРОЙСТВО ПОИСКА ОБЛАКОВ И МОЛНИЕВЫХ РАЗРЯДОВ | 2014 |
|
RU2568653C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ВОДНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2506539C1 |
| РАДИОЛОКАТОР | 2013 |
|
RU2533349C1 |
| ВЫСОТОМЕР | 2012 |
|
RU2501036C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2006 |
|
RU2313106C1 |
Изобретение относится к локационной технике. Достигаемый технический результат - уменьшение габаритов без уменьшения точности определения угловых координат и дальности до удаленных объектов. Указанный результат достигается благодаря использованию антенны, обеспечивающей моноимпульсную обработку моноимпульсного измерителя координат, элемента ИЛИ и блока автосопровождения по направлению, при этом выход антенны, обеспечивающей моноимпульсную обработку, соединен с входом моноимпульсного измерителя координат, имеющего группу выходов, соединенную с группой входов элемента ИЛИ и с четвертой группой входов блока вторичной обработки, имеющего вторую и третью группы входов, соответственно соединенные через блок автосопровождения по направлению с первой и второй группами выходов телевизионного координатора, и имеющим третью группу выходов, соединенную с третьей группой входов индикатора, при этом выход элемента ИЛИ соединен со вторым входом преобразователя дальности. 1 ил.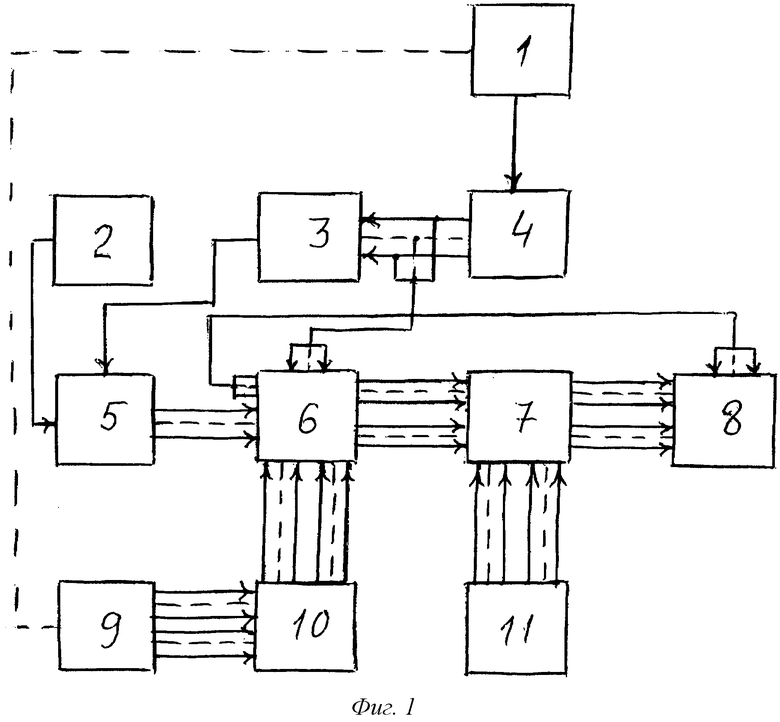
Устройство обработки локационных сигналов, состоящее из синхронизатора, преобразователя дальности, блока вторичной обработки, телевизионного координатора, блока из двух сумматоров, датчика азимута и угла места и индикатора, где выход синхронизатора соединен с первым входом преобразователя дальности, имеющего группу выходов, соединенную с первой группой входов блока вторичной обработки, имеющего первую группу выходов, выдающую значения азимутальных координат на первую группу входов первого сумматора блока из двух сумматоров и имеющего вторую группу выходов, выдающую значения угломестных координат на вторую группу входов второго сумматора блока из двух сумматоров, при этом третья группа входов первого сумматора соединена с первой группой выходов датчика азимута и угла места, выдающего информацию об азимуте, а четвертая группа входов второго сумматора соединена с второй группой выходов датчика азимута и угла места, выдающего информацию об угле места, причем группа выходов первого сумматора блока из двух сумматоров соединена с первой группой входов индикатора, группа выходов второго сумматора блока из двух сумматоров соединена с второй группой входов индикатора, отличающееся тем, что вводятся антенна, обеспечивающая моноимпульсную обработку, моноимпульсный измеритель координат, элемент ИЛИ и блок автосопровождения по направлению, при этом выход антенны, обеспечивающей моноимпульсную обработку, соединен с входом моноимпульсного измерителя координат, имеющего группу выходов, соединенную с группой входов элемента ИЛИ и с четвертой группой входов блока вторичной обработки, имеющего вторую и третью группы входов, соответственно соединенные через блок автосопровождения по направлению с первой и второй группами выходов телевизионного координатора и имеющим третью группу выходов, соединенную с третьей группой входов индикатора, а выход элемента ИЛИ соединен со вторым входом преобразователя дальности.
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2288483C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2010 |
|
RU2421749C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2009 |
|
RU2416806C2 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2003 |
|
RU2232401C1 |
| US 5302957 A, 12.04.1994 | |||
| Электрическая фритюрница | 1978 |
|
SU706060A1 |
| Приспособление для механического перемещения верхних салазок суппорта токарного | 1933 |
|
SU37959A1 |

