ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Отсутствует
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Представленное изобретение, в общем, относится к сельскохозяйственному оборудованию, а более конкретно, к сельскохозяйственному уборочному оборудованию.
УРОВЕНЬ ТЕХНИКИ
[0003] Сельскохозяйственное уборочное оборудование обычно убирает сельскохозяйственные культуры в направлении вперед, при этом по меньшей мере часть оборудования входит в соприкосновение с сельскохозяйственной культурой. Когда оборудование движется в противоположном или обратном направлении, может потребоваться поднятие части оборудования, входящего в соприкосновение с сельскохозяйственной культурой, в выключенное положение для предотвращения повреждения оборудования. Перед перемещением оборудования в обратном направлении, операторы оборудования должны вручную поднимать часть оборудования, входящего в соприкосновение с сельскохозяйственной культурой.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0004] Данное раскрытие изобретения представлено для введения выбора концепций, которые дополнительно описаны ниже в подробном описании изобретения и на сопровождающих чертежах. Данное раскрытие изобретения не предназначено для идентификации ключевых или существенных признаков приложенной формулы изобретения, не предназначено оно и для использования в содействии при определении объема правовых притязаний приложенной формулы изобретения.
[0005] Согласно аспекту представленного изобретения сельскохозяйственное транспортное средство может содержать первое и второе уборочные устройства, соединенные с сельскохозяйственным транспортным средством. Сельскохозяйственное транспортное средство может содержать датчик, который определяет, движется ли сельскохозяйственное транспортное средство в рабочем или нерабочем направлении. Сельскохозяйственное транспортное средство может содержать контроллер подъема в сообщении с датчиком и с первым и вторым уборочными устройствами. Контроллер подъема может автоматически переустанавливать первое и второе уборочные устройства в нерабочие положения, когда контроллер подъема определяет намерение перемещать сельскохозяйственное транспортное средство в нерабочем направлении.
[0006] Согласно аспекту представленного изобретения способ переустановки уборочного устройства, соединенного с сельскохозяйственным транспортным средством, может включать мониторинг одного или более датчиков для определения направления движения сельскохозяйственного транспортного средства; выбор одного или более уборочных устройств для управления; определение, имеется ли намерение перемещать сельскохозяйственное транспортное средство в нерабочем направлении; определение положения первого и второго уборочных устройств; и автоматическую переустановку первого и второго уборочных устройств в нерабочие положения по меньшей мере частично на основании намерения перемещать сельскохозяйственное транспортное средство в нерабочем направлении.
[0007] Данные и другие признаки станут очевидны из следующего подробного описания и сопровождающих чертежей, на которых в качестве иллюстрации показаны и описаны различные признаки. Представленное изобретение допускает другие и различные конфигурации, а некоторые его детали допускают модификацию в различных других отношениях, не выходя за рамки объема правовых притязаний представленного изобретения. Соответственно, подробное описание и сопровождающие чертежи необходимо рассматривать по своей сути, как иллюстративные, а не как запрещающие или ограничивающие.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Подробное описание чертежей относится к сопровождающим фигурам, на которых:
[0009] ФИГ. 1 представляет собой вид в перспективе транспортного средства, согласно одному варианту осуществления;
[0010] ФИГ. 2 представляет собой вид в перспективе транспортного средства, содержащего объединяющее устройство, согласно одному варианту осуществления;
[0011] ФИГ. 3 представляет собой вид в перспективе транспортного средства, содержащего объединяющее устройство, согласно одному варианту осуществления;
[0012] ФИГ. 4 представляет собой вид в перспективе внутренней части отделения оператора, согласно одному варианту осуществления;
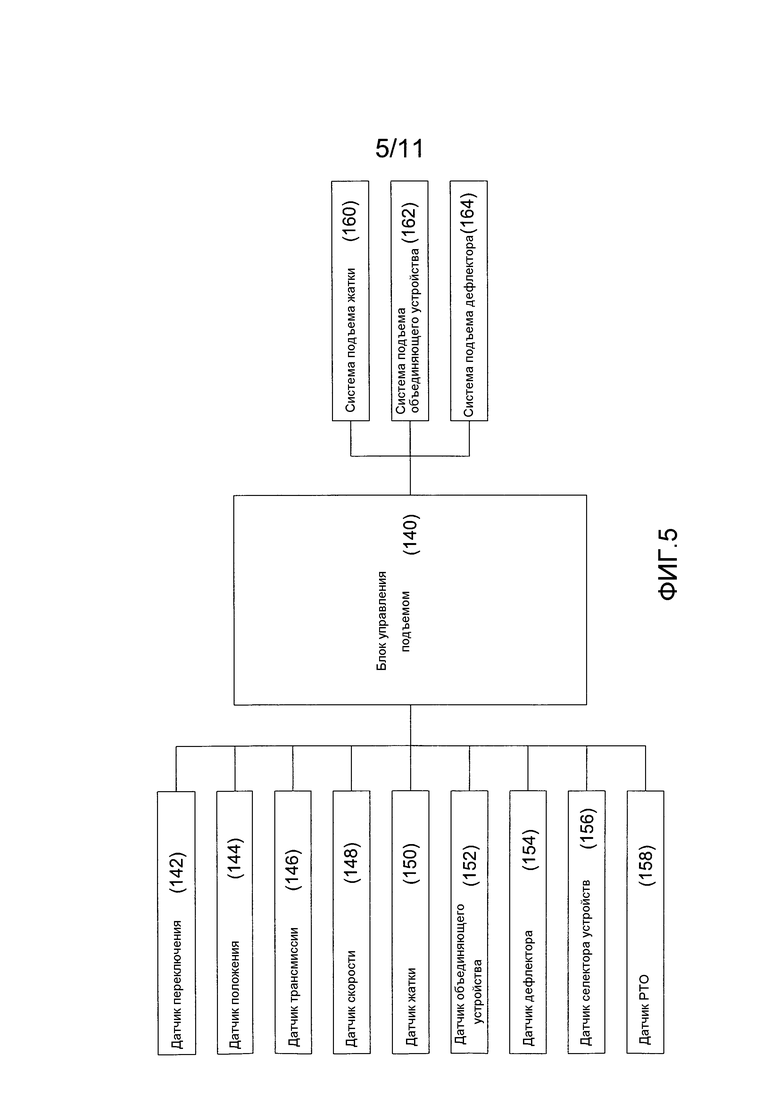
[0013] ФИГ. 5 представляет собой схематичное изображение блока управления подъемом, или контроллера подъема, согласно одному варианту осуществления;
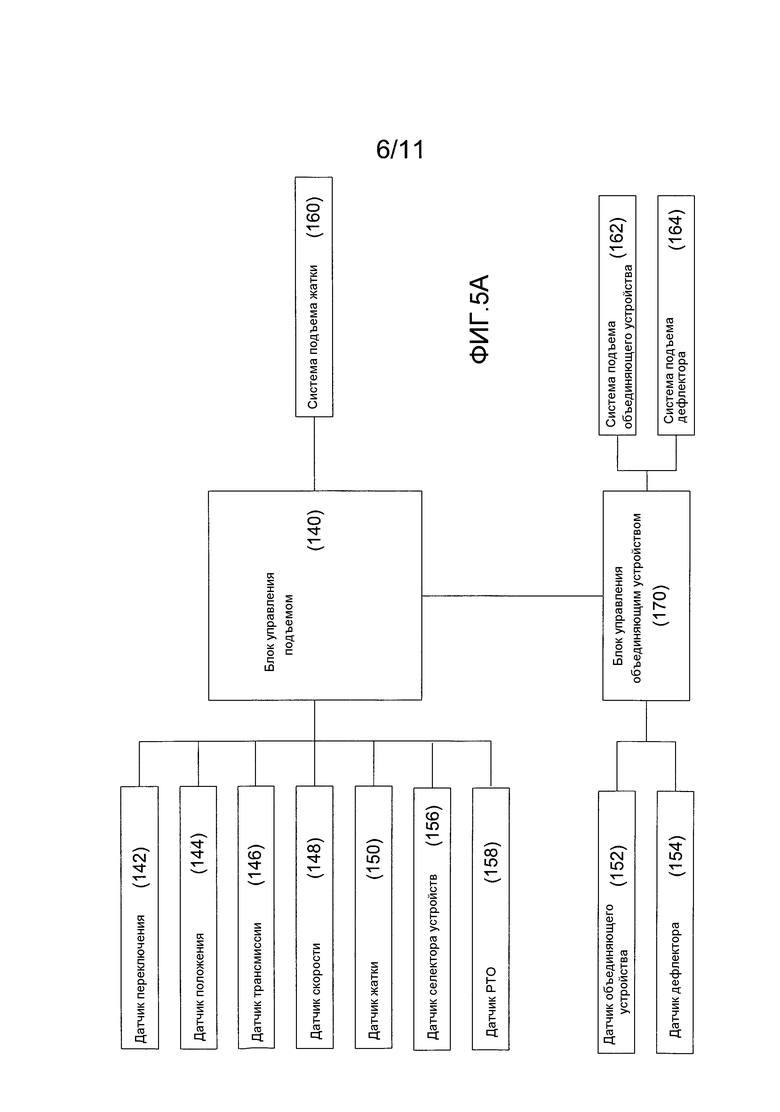
[0014] ФИГ. 5A представляет собой схематичное изображение блока управления подъемом, или контроллера подъема, согласно одному варианту осуществления;
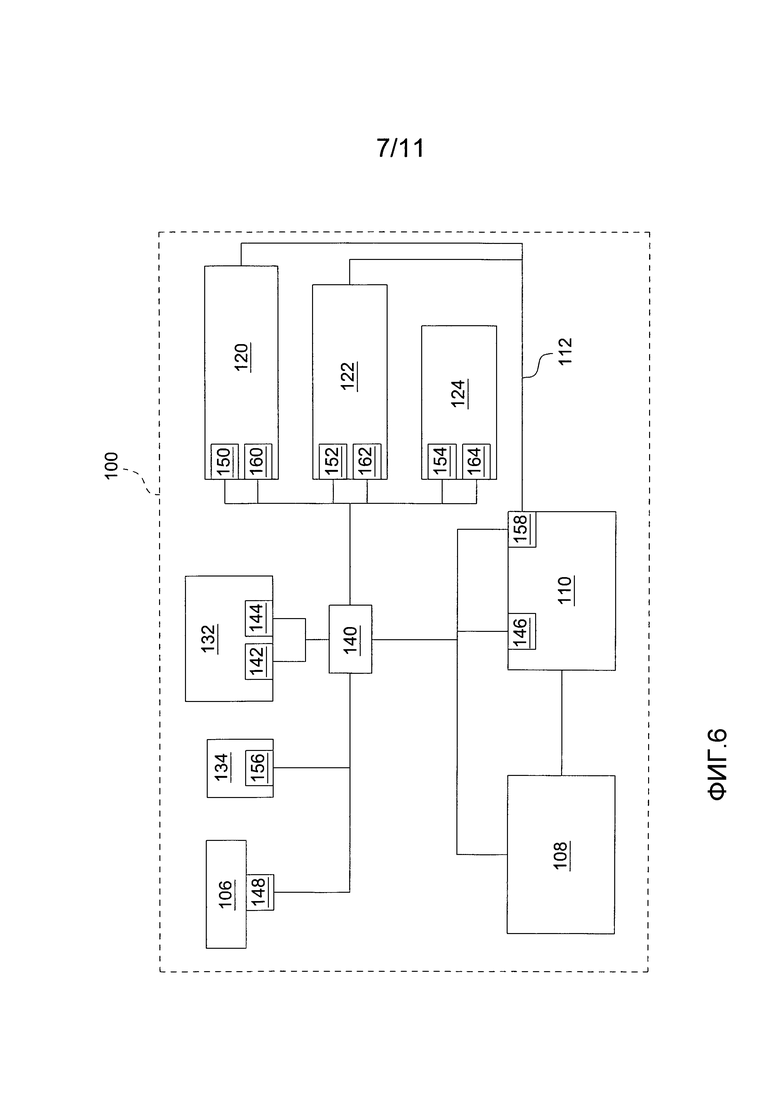
[0015] ФИГ. 6 представляет собой схематичное изображение осуществления блока управления подъемом, или контроллера подъема, в транспортном средстве, согласно одному варианту осуществления;
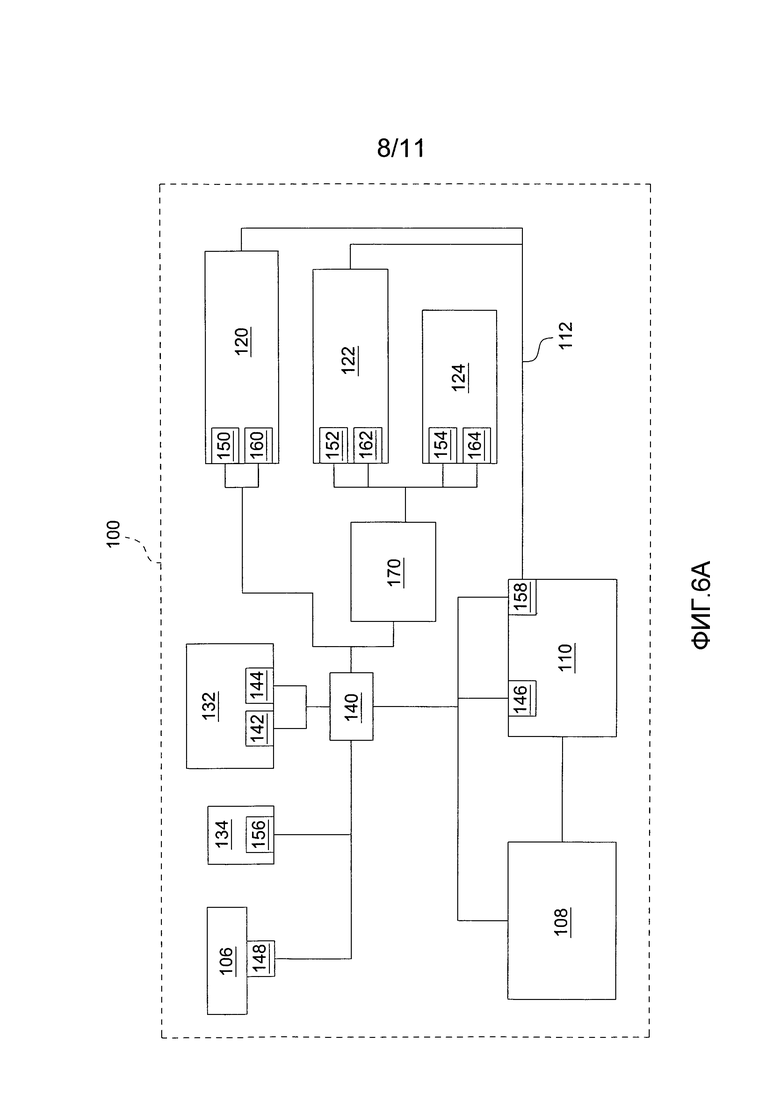
[0016] ФИГ. 6A представляет собой схематичное изображение осуществления блока управления подъемом, или контроллера подъема, в транспортном средстве, согласно одному варианту осуществления;
[0017] ФИГ. 7A представляет собой диаграмму схемы переключения для устройства ввода направления, согласно одному варианту осуществления;
[0018] ФИГ. 7B представляет собой диаграмму схемы переключения для устройства ввода направления, согласно одному варианту осуществления;
[0019] ФИГ. 7C представляет собой диаграмму схемы переключения для устройства ввода направления, согласно одному варианту осуществления;
[0020] ФИГ. 7D представляет собой диаграмму схемы переключения для устройства ввода направления, согласно одному варианту осуществления;
[0021] ФИГ. 8 представляет собой блок-схему, иллюстрирующую способ переустановки устройства, соединенного с транспортным средством, согласно одному варианту осуществления; а
[0022] ФИГ. 9 представляет собой блок-схему, иллюстрирующую способ переустановки устройства, соединенного с транспортным средством, согласно одному варианту осуществления.
[0023] Одинаковые ссылочные номера используются для обозначения одинаковых элементов на нескольких фигурах.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0024] Варианты осуществления изобретения, раскрытые на чертежах выше и в следующем подробном описании, не являются исчерпывающими или не ограничивают изобретение данными вариантами осуществления. Скорее, существует несколько вариантов и модификаций, которые могут быть выполнены без выхода за рамки объема правовых притязаний представленного изобретения.
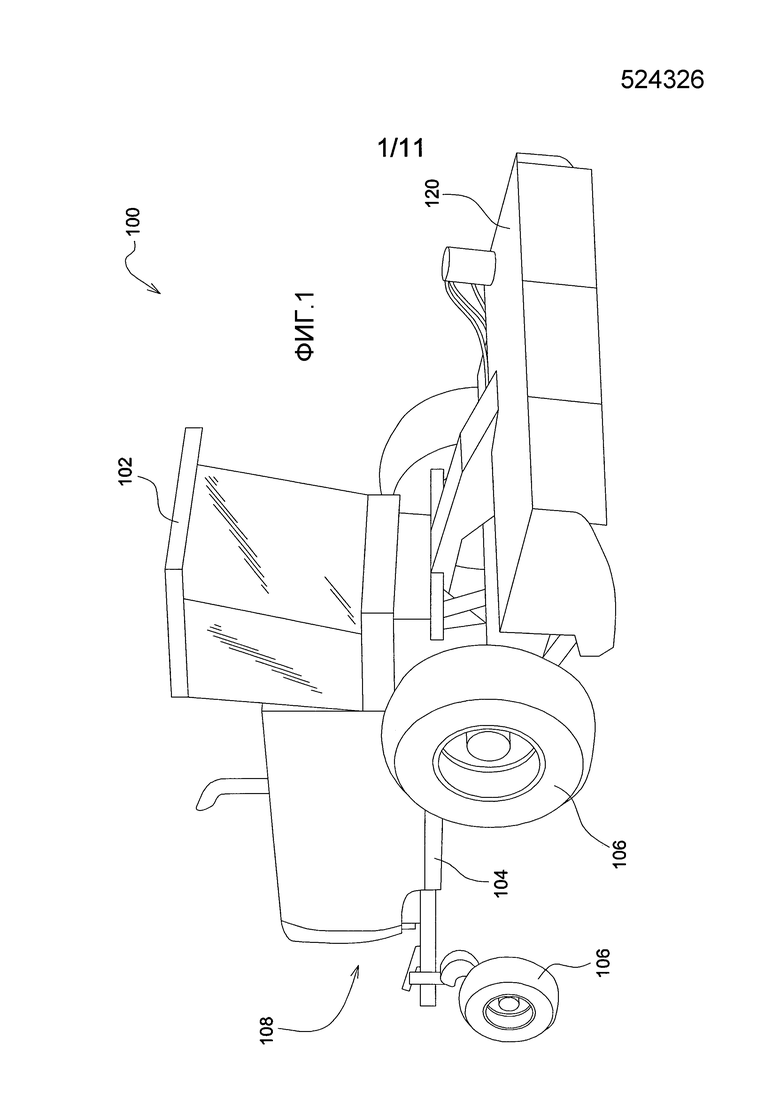
[0025] ФИГ. 1 иллюстрирует сельскохозяйственное транспортное средство 100, используемое, например, в сельскохозяйственной промышленности, которое может содержать автоматизированную систему переустановки, имеющую любой один или более из контроллеров, датчиков и устройств, описанных в данной заявке. Хотя на ФИГ. 1 показан самоходный валкоукладчик, представленное изобретение не ограничено только самоходным оборудованием или валкоукладчиками, но также применимо для другого самоходного и прицепного сельскохозяйственного уборочного оборудования, такого как измельчители, косилки, косилки-плющилки, кормоуборочные машины и комбайны. Транспортное средство 100 может содержать отделение или кабину 102 для оператораа, где оператор может направлять или управлять работой транспортного средства 100. Транспортное средство 100 может содержать раму 104, с которой функционально соединены одно или более соприкасающихся с землей устройств 106, таких как колеса или гусеницы. Транспортное средство 100 может содержать источник энергии и трансмиссию, функционально соединенную с одним или более соприкасающимися с землей устройствами 106. Транспортное средство 100 может содержать уборочное устройство или приспособление, такое как уборочная жатка 120, которая убирает множество сельскохозяйственных культур, включая, но не ограничиваясь, сено, кукурузу и сою. Уборочной жаткой 120 может быть ротационная жатка или полотенная жатка. Транспортное средство 100 может содержать единственную уборочную жатку 120 или множество уборочных жаток 120. Уборочная жатка 120 может содержать опущенное или рабочее положение, как показано, и поднятое или нерабочее положение. Уборочная жатка 120 может содержать активное или рабочее состояние и неактивное или нерабочее состояние. В рабочем состоянии, составные элементы уборочной жатки 120 двигаются или работают иным образом.
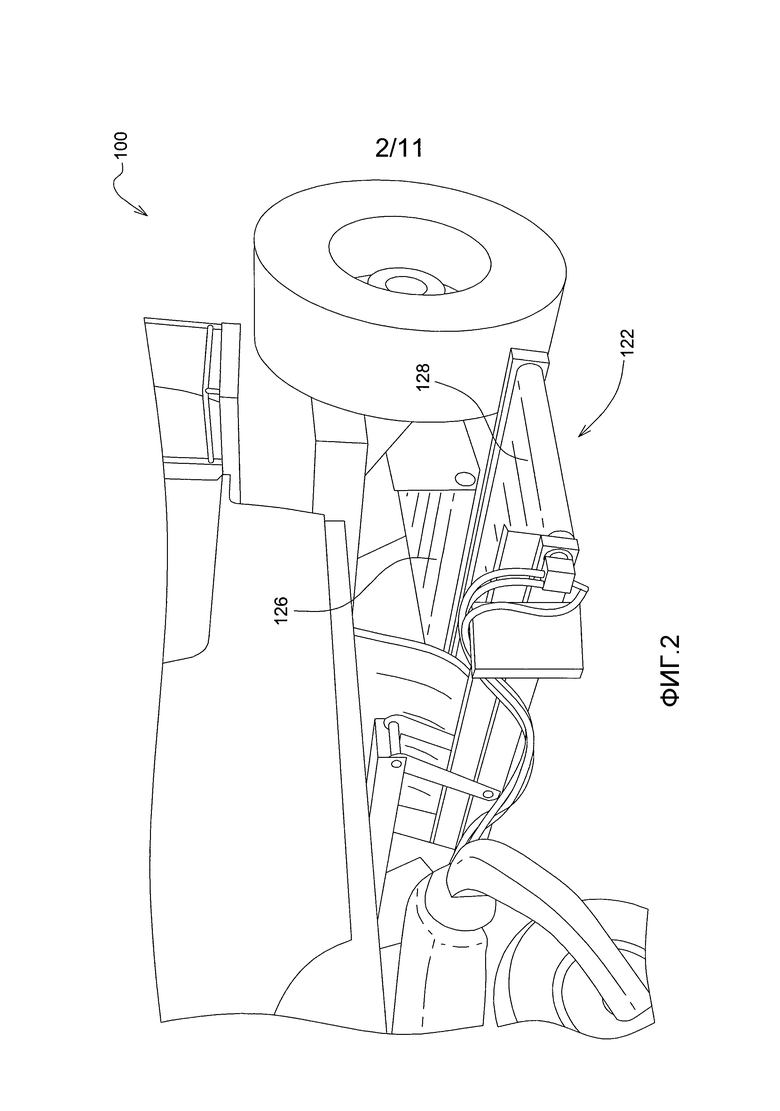
[0026] ФИГ. 2 иллюстрирует сельскохозяйственное транспортное средство 100, используемое в сельскохозяйственной промышленности, например, которое может содержать автоматизированную систему переустановки. Транспортное средство 100 может содержать другое уборочное устройство или приспособление, такое как объединяющее устройство 122, имеющее один или более транспортеров 126,128. Объединяющее устройство 122 может содержать опущенное или другое рабочее положение и поднятое или другое нерабочее положение. Объединяющее устройство 122 может содержать активное или рабочее состояние и неактивное или нерабочее состояние. В рабочем состоянии, один или более транспортеров 126,128 двигаются или работают иным образом. Объединяющее устройство 122 может содержать транспортер 126, который принимает убранную сельскохозяйственную культуру из уборочной жатки 120, показанной на ФИГ. 1, и доставляет сельскохозяйственную культуру в поперечный транспортер 128. Поперечный транспортер 128 принимает сельскохозяйственную культуру из транспортера 126 и доставляет сельскохозяйственную культуру на другую сторону транспортного средства 100. Дополнительно или в качестве альтернативы, транспортное средство 100 может содержать одно или более объединяющих устройств 122, расположенных на или около задней части транспортного средства 100.
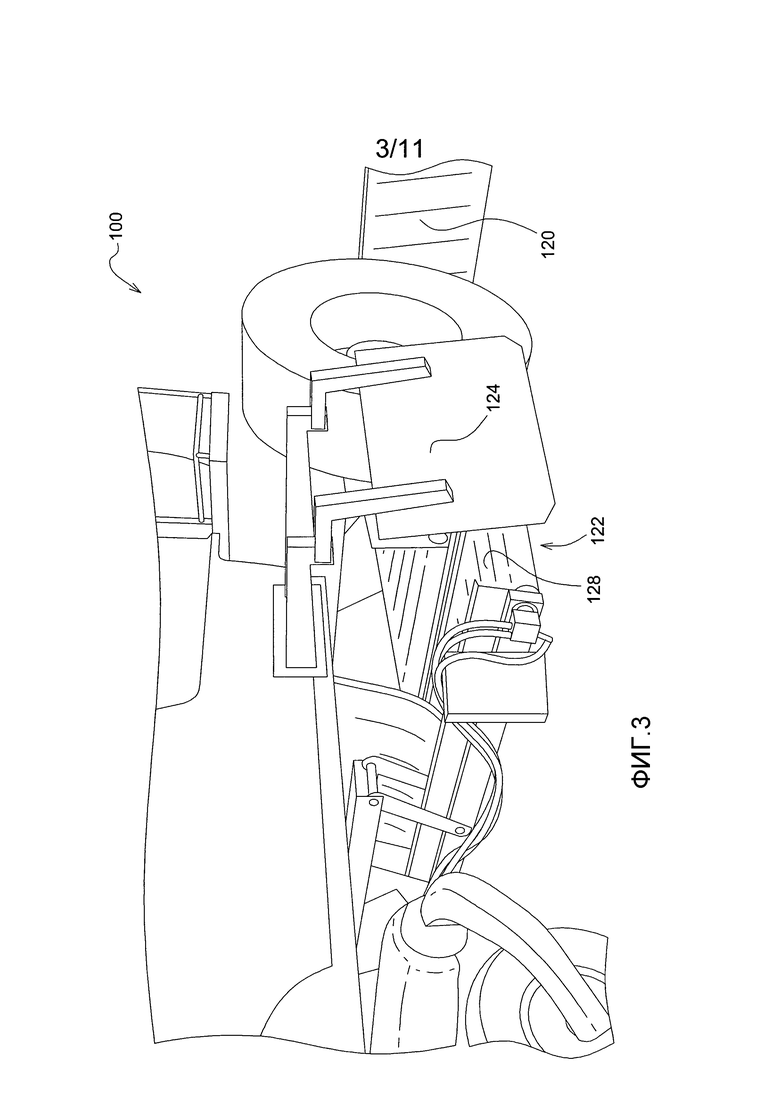
[0027] ФИГ. 3 иллюстрирует сельскохозяйственное транспортное средство 100, содержащее уборочное устройство или приспособление, такое как объединяющее устройство 122. Объединяющее устройство 122 может содержать поперечный транспортер 128, который принимает сельскохозяйственную культуру из уборочной жатки 120, показанной, например, на ФИГ. 1, и доставляет сельскохозяйственную культуру на другую сторону транспортного средства 100. Объединяющее устройство 122 может содержать дефлектор 124, который может направлять сельскохозяйственную культуру после того, как она покидает поперечный транспортер 128. Дефлектор 124 может содержать опущенное или рабочее положение, как показано, и поднятое или нерабочее положение. В опущенном положении, дефлектор 124 зацепляет или направляет сельскохозяйственную культуру после того, как она покидает поперечный транспортер 128. В поднятом положении, дефлектор 124 остается отсоединенным от потока сельскохозяйственной культуры, когда она покидает поперечный транспортер 128. Транспортное средство 100 может содержать другое уборочное устройство или приспособление, такое как валец для канолы или валковый валец, который может находиться под транспортным средством 100 в аналогичном месте, как объединяющее устройство 122 или позади транспортного средства 100. Валец для канолы или валковый валец может использоваться в сочетании с полотенной жаткой 120. Содержит ли сельскохозяйственное уборочное транспортное средство 100 ротационную жатку, соединенную с объединяющим устройством, или полотенную жатку, соединенную с вальцом для канолы, данные устройства могут убирать сельскохозяйственные культуры последовательно, при этом соответствующая жатка первой обрабатывает сельскохозяйственную культуру, а затем объединяющее устройство или валец для канолы вторым обрабатывает сельскохозяйственную культуру.
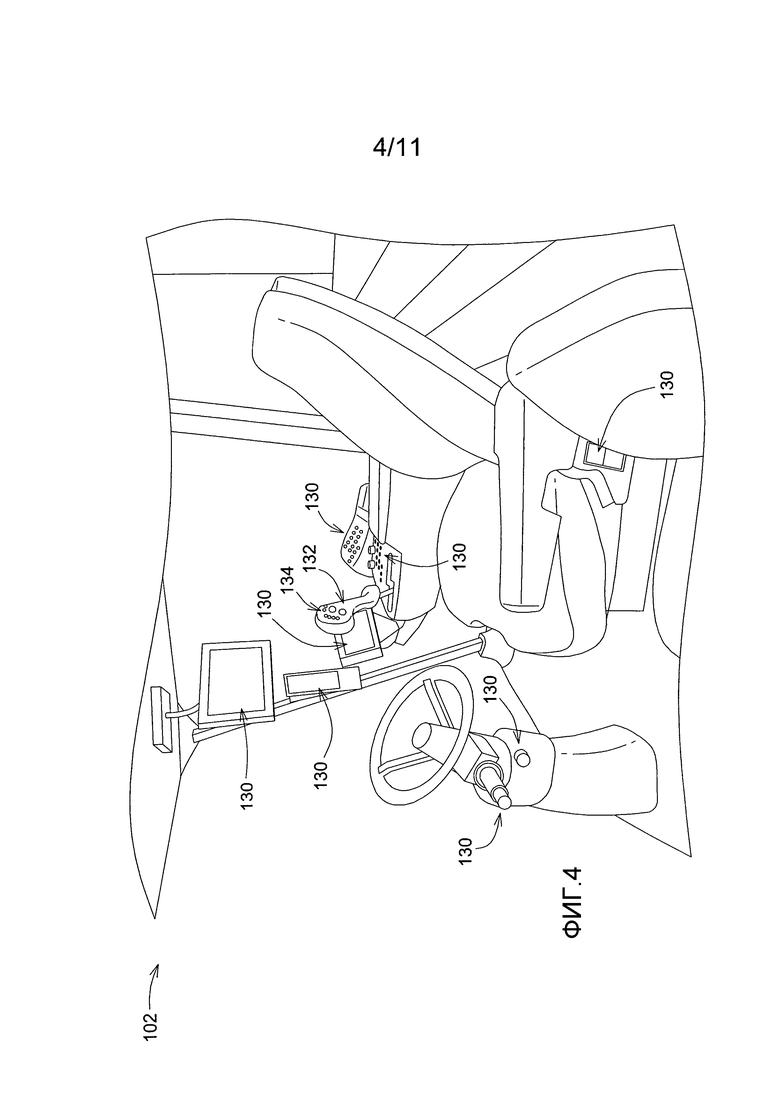
[0028] ФИГ. 4 иллюстрирует внутреннюю часть кабины 102, содержащей одно или более средств 130 управления оператора, таких как устройство 132 ввода направления и селектор 134 устройств. Устройство 132 ввода направления предоставляет оператору интерфейс для управления направлением транспортного средства 100, которое показано, например, на ФИГ. 1. Устройство 132 ввода направления может переключать транспортное средство 100 в направление вперед, в обратное направление или в нейтральное, как показано, например, на ФИГ. 7A-7D. Направление вперед может быть рабочим направлением; обратное направление может быть нерабочим направлением; а нейтральное может быть рабочим или нерабочим направлением. Селектор 134 устройств предоставляет оператору интерфейс для выбора или предварительного выбора, какие устройства должны контролироваться автоматизированной системой переустановки. Селектор 134 устройств является необязательным и может содержаться или не содержаться в зависимости от варианта осуществления. Селектор 134 устройств может содержать опцию для выбора жатки 120, объединяющего устройства 122, дефлектора 124, одного или более других устройств или любой комбинации данных устройств для управления с помощью функции автоматизированной переустановки блока 140 управления подъемом, показанного, например, на ФИГ. 5 или 5A. Селектор 134 устройств также может иметь опцию для выбора нулевой или отсутствующей регулировки, или регулировки «выключено», когда ни одно из устройств не будет автоматически регулироваться блоком 140 управления подъемом. Данный выбор будет отключать функцию автоматизированной переустановки блока 140 управления подъемом, отключая таким образом автоматизированную систему переустановки. Тем не менее, каждое из устройств можно вручную регулировать посредством блока 140 управления подъемом или другого контроллера. Селектор 134 устройств также может иметь опцию для выбора регулировки по умолчанию или предварительно заданной регулировки, которая будет содержать предварительно заданный выбор устройств или выбор по умолчанию. Селектор 134 устройств также может иметь опцию для выбора определяемой оператором регулировки, при которой оператор может определять, какие устройства выбирать.
[0029] ФИГ. 5 иллюстрирует схематичный чертеж блока 140 управления подъемом, или контроллера подъема, согласно одному варианту осуществления. ФИГ. 5A иллюстрирует схематичный чертеж блока 140 управления подъемом, или контроллера подъема, и блока 170 управления объединяющим устройством, или контроллера объединяющего устройства, согласно еще одному варианту осуществления. ФИГ. 6 иллюстрирует схематичный чертеж осуществления контроллера 140 подъема в рабочей машине 100, согласно одному варианту осуществления. ФИГ. 6A иллюстрирует схематичный чертеж осуществления контроллера 140 подъема и контроллера 170 объединяющего устройства в рабочей машине 100, согласно еще одному варианту осуществления. Следующее описание может относиться к варианту осуществления на одной или более следующих фигур: ФИГ. 5, ФИГ. 5A, ФИГ. 6 и ФИГ. 6A. Транспортное средство 100 может содержать источник 108 энергии, функционально соединенный с трансмиссией 110. Источник 108 энергии может представлять собой двигатель внутреннего сгорания, электрический двигатель или их комбинацию. Транспортное средство 100 может содержать устройство 132 ввода направления, соединенное с трансмиссией 120, например, либо механически, либо гидравлически, либо электрически. Транспортное средство 100 может содержать вал 112 отбора мощности или PTO, функционально соединенный с трансмиссией 110, или редуктор, соединенный с источником 108 энергии или трансмиссией 110 и функционально соединенный с уборочной жаткой 120, объединяющим устройством 122 или и тем и другим. Вал 112 PTO может обеспечивать энергию, требующуюся для приведения в действие уборочной жатки 120, объединяющего устройства 122 или и того и другого.
[0030] Блок 140 управления подъемом, или контроллер подъема, может содержать один или более электронных блоков управления или контроллеров на основе микропроцессора. Контроллер 140 подъема может содержать один автономный блок или два или более отдельных блока. Контроллером 140 подъема может быть программируемый логический контроллер, также известный как PLC или программируемый контроллер. Контроллер 140 подъема может соединяться с электронной системой управления транспортным средством или сельскохозяйственным уборочным оборудованием через информационную шину, такую как шина сети локальных контроллеров, или контроллер 140 подъема может быть частью электронной системы управления транспортным средством или оборудованием. Контроллер 140 подъема может находиться во взаимодействии с одним или более датчиков, включая но не ограничиваясь: датчик 142 переключения, датчик 144 направления, датчик 146 трансмиссии, датчик 148 числа оборотов, датчик 150 положения жатки, датчик 152 положения объединяющего устройства, датчик 154 положения дефлектора, датчик 156 селектора, датчик 158 отбора мощности или PTO и другие датчики. Каждый из изложенных выше датчиков может быть отдельным или интегрированным в каждое соответствующее устройство. В качестве альтернативы, вместо датчиков или в дополнение к ним, контроллер 140 подъема может находиться во взаимодействии с каждым из устройств. Контроллер 140 подъема также может находиться во взаимодействии с одним или более устройствами или системами, включая но не ограничиваясь, систему 160 подъема жатки, систему 162 подъема объединяющего устройства, систему 164 подъема дефлектора и другие системы подъема, включая, но не ограничиваясь, систему подъема вальца для канолы или валкового вальца. Контроллер 140 подъема может иметь автоматизированный или автоматический режим и ручной режим. В автоматизированном или автоматическом режиме, функция автоматизированной переустановки контроллера 140 подъема включена и может автоматически переустанавливать одно или более устройств. В ручном режиме, функция автоматизированной переустановки контроллера 140 подъема отключена, а контроллер 140 подъема может вручную переустанавливать одно или более устройств на основании входной информации и управления оператора.
[0031] Блок 170 управления объединяющим устройством, или контроллер объединяющего устройства, может содержать один или более электронных блоков управления или контроллеров на основе микропроцессора. Контроллер 170 объединяющего устройства может содержать один автономный блок или два или более отдельных блока. Контроллер 170 объединяющего устройства может быть частью контроллера 140 подъема. Контроллером 170 объединяющего устройства может быть программируемый логический контроллер, также известный как PLC или программируемый контроллер. Контроллер 170 объединяющего устройства может соединяться с электронной системой управления транспортным средством или сельскохозяйственным уборочным оборудованием через информационную шину, такую как шина сети локальных контроллеров, или контроллер 170 объединяющего устройства может быть частью электронной системы управления транспортным средством или оборудованием. Контроллер 170 объединяющего устройства может находиться во взаимодействии с одним или более датчиками, включая, но не ограничиваясь: датчик 152 положения объединяющего устройства, датчик 154 положения дефлектора и другие датчики. Каждый из перечисленных выше датчиков может быть отдельным или объединен с каждым соответствующим устройством. В качестве альтернативы, вместо датчиков или в дополнение к ним, контроллер 170 объединяющего устройства может находиться во взаимодействии с каждым из устройств. Контроллер 170 объединяющего устройства также может находиться во взаимодействии с одним или более устройствами или системами, включая, но не ограничиваясь, систему 162 подъема объединяющего устройства, систему 164 подъема дефлектора и другие системы подъема. Контроллер 170 объединяющего устройства может иметь автоматизированный или автоматический режим и ручной режим.
[0032] Датчик 142 переключения может находиться на или около устройства 132 ввода направления или на или около любого из составных элементов переключения или трансмиссии. Датчик 142 переключения может выявлять, когда устройство 132 ввода направления принимает вводимую оператором информацию. Оператор может применять усилие или ввод в устройство 132 ввода направления для того, чтобы инициировать изменение направления движения транспортного средства 100. Датчик 142 переключения может определять или выявлять величину вводимой оператором информации, принимаемой устройством 132 ввода направления, направление вводимой оператором информации, принимаемой устройством 132 ввода направления, или и то и другое. Датчик 142 переключения может выявлять, когда вводимая оператором информация удаляется из устройства 132 ввода направления. Датчик 142 переключения может выявлять, когда завершено изменение направления движения или когда устройство 132 ввода направления находится в необходимом положении.
[0033] Датчик 142 переключения может выявлять, является ли вводимая оператором информация вводом переключения или вводом непереключения. Ввод переключения, например, содержит вводимую оператором информацию, применяемую в виде способа и направления, которая будет генерировать изменение скорости или направления движения. Ввод непереключения, например, содержит вводимую оператором информацию, применяемую в виде способа или направления, которая не будет генерировать изменение скорости или направления. Датчиком 142 переключения может быть датчик любого типа, способный выявлять вводимую оператором информацию, включая, но не ограничиваясь, индуктивные датчики, тензодатчики или контактные датчики.
[0034] Датчик 144 направления может находиться на устройстве 132 ввода направления или соединении между датчиком 144 направления и трансмиссией 110 или около него. Датчик 144 направления может выявлять положение устройства 132 ввода направления, в том числе, в каком направлении, например, вперед, нейтральном или обратном, расположено устройство 132 ввода направления. Датчик 144 направления может содержать один или более шаровых переключателей.
[0035] Датчик 146 трансмиссии может находиться на трансмиссии 110 или в ней и выявлять, находится ли трансмиссия 110 в состоянии вперед, нейтральном или обратном. Датчик 146 трансмиссии может выявлять текущее состояние посредством сравнения числа оборотов взаимосоединенных трансмиссионных валов. Датчик 146 трансмиссии может содержать один или более датчиков числа оборотов или вращения для измерения числа оборотов трансмиссионных валов.
[0036] Датчик 148 числа оборотов может находиться около вторичного вала трансмиссии 110 или оси или колеса для выявления, движется ли транспортное средство 100 и скорости и направления движения, например, вперед или обратно. Датчик 148 числа оборотов может выявлять скорость и направление вторичного вала трансмиссии 110 или оси или колеса 106, а затем определять или рассчитывать скорость и направление транспортного средства 100.
[0037] Датчик 150 жатки может находиться на уборочной жатке 120 или около нее. Датчик 150 жатки может выявлять положение, рабочее состояние или и то и другое жатки 120. Датчиком 150 жатки может быть датчик положения, который определяет положение жатки 120, датчик давления, который определяет давление текучей среды, соединенной с жаткой 120, или электрический датчик, который определяет электрическое состояние жатки 120.
[0038] Датчик 152 объединяющего устройства может находиться на объединяющем устройстве 122 или около него. Датчик 152 объединяющего устройства может выявлять положение, рабочее состояние или и то и другое объединяющего устройства 122. Датчиком 152 объединяющего устройства может быть датчик положения, который определяет положение объединяющего устройства 122, датчик давления, который определяет давление текучей среды, соединенной с объединяющим устройством 122, или электрический датчик, который определяет электрическое состояние объединяющего устройства 122.
[0039] Датчик 154 дефлектора может находиться на дефлекторе 124 или около него. Датчик 154 дефлектора может выявлять положение, рабочее состояние или и то и другое дефлектора 124. Датчиком 154 дефлектора может быть датчик положения, который определяет положение дефлектора 124, датчик давления, который определяет давление текучей среды, соединенной с дефлектором 124, или электрический датчик, который определяет электрическое состояние дефлектора 124.
[0040] Датчик 156 селектора может находиться на селекторе 134 устройств или около него. Датчик 156 селектора может выявлять выбор селектора 134 устройств, например, какие устройства были выбраны для автоматического регулирования контроллером 140 подъема. Датчиком 156 селектора может быть датчик любого типа, который может выявлять и передавать выбор селектора 134 устройств в контроллер 140 подъема.
[0041] Датчик 158 отбора мощности или PTO может находиться на валу 112 PTO или около него. Датчик 158 PTO может выявлять, находится ли вал 112 PTO в рабочем состоянии, например, вращается, или в нерабочем состоянии, например, не вращается. Дополнительно или в качестве альтернативы, датчик 158 PTO может выявлять скорость вращения вала 112 PTO. Датчиком 158 PTO может быть датчик любого типа, который может выявлять и передавать, вращается ли вал 112 PTO, скорость вращения вала 112 PTO или и то и другое, в контроллер 140 подъема.
[0042] Селектор 134 устройств может выбирать, какие устройства следует автоматически регулировать контроллером 140 подъема. Например, селектор 134 устройств может содержать опцию для выбора жатки 120, объединяющего устройства 122, дефлектора 124, одного или более других устройств или любой комбинации данных устройств. Затем контроллер 140 подъема будет автоматически управлять или переустанавливать выбранные устройства. В качестве альтернативы, дефлектор 124 может быть частью объединяющего устройства 122, так что контроллер 140 подъема будет опосредованно управлять или переустанавливать дефлектор 124 посредством управления объединяющим устройством 122. Селектор 134 устройств может содержать опцию не выбирать никакие устройства для автоматического регулирования контроллером 140 подъема. Данный выбор будет отключать функцию автоматизированной переустановки контроллера 140 подъема, и в результате, отключать автоматизированную систему переустановки. Селектор 134 устройств также может содержать настройку «выключено» или отключено, что также будет отключать функцию автоматизированной переустановки контроллера 140 подъема. Дополнительно или в качестве альтернативы, автоматизированная система переустановки может включаться и отключаться другими средствами управления. Тем не менее, каждое из устройств может быть переустановлено под ручным управлением оператора оборудования.
[0043] Система 160 подъема жатки может использовать любую механическую, гидравлическую, пневматическую или электрическую систему или комбинацию систем, для поднимания и опускания уборочной жатки или жаток 120. Система 162 подъема объединяющего устройства может использовать любую механическую, гидравлическую, пневматическую или электрическую систему или комбинацию систем, для поднимания и опускания объединяющего устройства или устройств 122. Система 164 подъема дефлектора может использовать любую механическую, гидравлическую, пневматическую или электрическую систему или комбинацию систем, для поднимания и опускания дефлектора или дефлекторов 124. Для поднимания и опускания или управления иным образом одним или более другими устройствами, соединенными или соединенными с транспортным средством 100, может использоваться одна или более других систем подъема.
[0044] Контроллер 140 подъема может находиться в электрическом взаимодействии с одним или более датчиками, устройствами или другими контроллерами. Контроллер 140 подъема может определять намерение перемещать транспортное средство 100 в обратном, вперед, нейтральном, рабочем, нерабочем или другом направлении на основании взаимодействия или сигналов, получаемых от одного или более датчиков, устройств или других контроллеров. Контроллер 140 подъема может использовать взаимодействие или сигналы, получаемые от одного или более датчиков для определения, включать ли систему 160 подъема жатки, систему 162 подъема объединяющего устройства, систему 164 подъема дефлектора, другие системы подъема или любую комбинацию данных систем. Контроллер 140 подъема может определять, поднимать ли или опускать, или иным образом переустанавливать или управлять, одной или более уборочной жаткой 120, объединяющим устройством 122, вальцом для канолы или валковым вальцом, дефлектором 124 или одним или более другими устройствами на основании входной информации, получаемой от одного или более датчиков, устройств или других контроллеров. Например, контроллер 140 подъема может разрешать автоматическую переустановку уборочной жатки 120 и объединяющего устройства 122 в нерабочие положения на основании входной информации, получаемой от одного или более датчиков, которые выявляют намерение перемещать транспортное средство 100 в нерабочем направлении. В еще одном примере, контроллер 140 подъема может разрешать автоматическую переустановку уборочной жатки 120 и объединяющего устройства 122 в нерабочие положения на основании входной информации, получаемой от одного или более датчиков, которые выявляют намерение перемещать транспортное средство 100 в нерабочем направлении и выявляют, что уборочная жатка 120, объединяющее устройство 122 или и то и другое, находятся в рабочем состоянии.
[0045] Контроллер 170 объединяющего устройства может находиться в электрическом взаимодействии с одним или более датчиками, устройствами и другими контроллерами, включая контроллер 140 подъема. Контроллер 170 объединяющего устройства может использовать взаимодействие или сигналы, получаемые от одного или более датчиков, устройств и других контроллеров для определения, включать ли систему 162 подъема объединяющего устройства, систему 164 подъема дефлектора, другие системы подъема или любую комбинацию данных систем. Контроллер 170 объединяющего устройства может определять, поднимать ли или опускать, или иным образом переустанавливать или управлять, одним или более из объединяющего устройства 122, дефлектора 124 или одного или более других устройств на основании входной информации, получаемой от одного или более датчиков, устройств и других контроллеров. Например, контроллер 170 объединяющего устройства может разрешать автоматическую переустановку объединяющего устройства 122, дефлектора 124 или и того и другого в нерабочие положения на основании входной информации, получаемой от одного или более датчиков, устройств и других контроллеров, которые выявляют или определяют намерение перемещать транспортное средство 100 в нерабочем направлении.
[0046] Контроллер 140 подъема может направлять системы подъема одновременно переустанавливать соответствующие устройства; начать переустановку первого устройства, откладывая в то же время переустановку второго устройства до тех пор, пока первое устройство не достигнет конкретного положения; начать переустановку первого устройства, откладывая в то же время переустановку второго устройства до тех пор, пока не пройдет определенное количество времени; или полностью переустановить первое устройство перед началом переустановки второго устройства. Контроллер 140 подъема может направлять соответствующие системы подъема выполнять любой один из данных сценариев или другие.
[0047] Контроллер 140 подъема может разрешить поднимать уборочную жатку 120, объединяющее устройство 122, дефлектор 124, одно или более других устройств или любую комбинацию данных устройств, когда один или более датчиков указывают на намерение перемещать транспортное средство 100 в обратном или в другом нерабочем направлении, в направлении, противоположном уборочному или рабочему направлению, или в направлении, отличающемся от уборочного или рабочего направления. Например, контроллер 140 подъема может разрешать автоматически поднимать уборочную жатку 120 и объединяющее устройство 122, когда один или более датчиков указывают на намерение перемещать транспортное средство 100 в обратном направлении. Датчик 142 переключения, датчик 144 направления, датчик трансмиссии, датчик 148 числа оборотов, другие датчики или любая комбинация данных датчиков способны указывать на намерение перемещать транспортное средство 100 в обратном или в другом нерабочем направлении. Дополнительно или в качестве альтернативы, контроллер 140 подъема может разрешать отключать уборочную жатку 120, объединяющее устройство 122, одно или более других устройств или любую комбинацию данных устройств.
[0048] Контроллер 140 подъема может разрешить поднимать одно или более устройств, когда один или более датчиков указывают на намерение перемещать транспортное средство 100 в обратном или в другом нерабочем направлении и когда один или более датчиков показывают, что уборочная жатка 120, объединяющее устройство 122 или и то и другое находятся в рабочем состоянии. Например, контроллер 140 подъема может разрешать автоматически поднимать уборочную жатку 120 и объединяющее устройство 122, когда один или более датчиков указывают на намерение перемещать транспортное средство 100 в обратном направлении, а один или более датчиков показывают, что уборочная жатка 120, объединяющее устройство 122 или и то и другое находятся в рабочем состоянии. Датчик 150 жатки, датчик 152 объединяющего устройства, датчик 158 PTO, другие датчики или любая комбинация данных датчиков способны указывать, находятся ли уборочная жатка 120, объединяющее устройство 122 или и то и другое в рабочем состоянии. Контроллер 140 подъема может определять, что одно или более устройств находятся в их соответствующем поднятом или нерабочем положениях на основании количества времени, которое одно или более устройств были подняты или переустановлены; или контроллер 140 подъема может определять, что одно или более устройств находятся в их соответствующем поднятом или нерабочем положениях, на основании положения одного или более устройств или и того и другого, с использованием, например, датчиков положения.
[0049] Контроллер 140 подъема может разрешать возврат уборочной жатки 120, объединяющего устройства 122, дефлектора 124, одного или более других устройств или любой комбинации данных устройств в их соответствующие рабочие положения или соответствующие предыдущие положения, когда один или более датчиков указывают на намерение перемещать транспортное средство 100 в направлении вперед или в другом рабочем направлении или когда один или более датчиков указывают на намерение изменить направление транспортного средства 100. Например, контроллер 140 подъема может разрешать автоматически опускать или иным образом переустанавливать уборочную жатку 120 и объединяющее устройство 122, когда один или более датчиков указывают на намерение перемещать транспортное средство 100 в направлении вперед. Дополнительно или в качестве альтернативы, контроллер 140 подъема может разрешать возврат уборочной жатки 120, объединяющего устройства 122, дефлектора 124, одного или более других устройств или любой комбинации данных устройств в их соответствующие рабочие состояния. Контроллер 140 подъема может определять, что одно или более устройств находятся в их соответствующих опущенных или рабочих положениях на основании количества времени, которое одно или более устройств были опущены или переустановлены; или контроллер 140 подъема может определять, что одно или более устройств находятся в их соответствующих опущенных или рабочих положениях на основании положения одного или более устройств или и того и другого, с использованием, например, датчиков положения.
[0050] Когда контроллер 140 подъема определяет, что одно или более из уборочной жатки 120, объединяющего устройства 122, дефлектора 124 или других устройств должно быть поднято или опущено, или иным образом переустановлено, контроллер 140 подъема отправляет сообщение одной или более соответствующим системам: системе 160 подъема жатки, системе 162 подъема объединяющего устройства, системе 164 подъема дефлектора и другим системам подъема. Например, когда контроллер 140 подъема определяет, что уборочная жатка 120 и объединяющее устройство 122 должны быть подняты, контроллер 140 подъема отправляет сообщение системе 160 подъема жатки поднять жатку 120, а системе 162 подъема объединяющего устройства поднять объединяющее устройство 122. Контроллер 140 подъема может направлять систему 160 подъема жатки и систему 162 подъема объединяющего устройства одновременно поднимать жатку 120 и объединяющее устройство 122; начать подъем жатки 120 перед объединяющим устройством 122 или наоборот; или полностью поднять жатку 120 перед началом подъема объединяющего устройства 122 или наоборот. Контроллер 140 подъема может направлять систему 160 подъема жатки начать подъем жатки 120 в течение конкретного количества времени перед началом подъема объединяющего устройства 122 или наоборот. Контроллер 140 подъема может направлять систему 160 подъема жатки начать подъем жатка 120 до тех пор, пока жатка 120 не достигнет определенного положения перед началом подъема объединяющего устройства 122 или наоборот. Хотя предшествующие примеры были описаны с двумя устройствами, те же самые концепции применимы для трех или более устройств.
[0051] Контроллер 140 подъема может переустанавливать уборочную жатку 120, объединяющее устройство 122, дефлектор 124, одно или более других устройств или любую комбинацию данных устройств, когда датчик 142 переключения обнаруживает вводимую оператором информацию в устройство 132 ввода направления. Контроллер 140 подъема может переустанавливать одно или более данных устройств, когда датчик 144 направления обнаруживает, что устройство 132 ввода направления передвинуто в положение вперед или из него, передвинуто в нейтральное положение или из него, или передвинуто в обратное положение или из него, как показано, например, на ФИГ. 7A-7D. Контроллер 140 подъема может переустанавливать одно или более данных устройств, когда датчик 146 трансмиссии определяет, что трансмиссия 110 находится на шестерне переднего хода, нейтральной или обратного хода или на переходе между любыми из данных шестерней. Контроллер 140 подъема может переустанавливать одно или более из данных устройств, когда датчик 148 числа оборотов обнаруживает, что транспортное средство остановилось или начало двигаться или изменило направления. Контроллер 140 подъема может переустанавливать одно или более данных устройств, когда датчик 148 числа оборотов обнаруживает, что транспортное средство 100 остановилось или начало двигаться или изменило направления. Например, контроллер 140 подъема может поднимать жатку 120 и объединяющее устройство 122, когда датчик 142 переключения или датчик 144 направления, или и то и другое, обнаруживает, что устройство 132 ввода направления передвинуто из положения вперед в нейтральное положение, из положения вперед в обратное положение или из нейтрального в обратное положение.
[0052] Дополнительно или в качестве альтернативы, контроллер 140 подъема может изменить рабочее состояние уборочной жатки 120, объединяющего устройства 122, одного или более других устройств или любой комбинации данных устройств, когда датчик 142 переключения обнаруживает вводимую оператором информацию в устройство 132 ввода направления. Контроллер 140 подъема может изменить рабочее состояние одного или более данных устройств, когда датчик 144 направления обнаруживает передвижение устройства 132 ввода направления в положение вперед или из него, передвижение в нейтральное положение или из него, или передвижение в обратное положение или из него. Контроллер 140 подъема может изменить рабочее состояние одного или более данных устройств, когда датчик 146 трансмиссии определяет, что трансмиссия 110 находится на передней, нейтральной или обратной передаче или переходит между любыми из данных передач. Контроллер 140 подъема может изменить рабочее состояние одного или более данных устройств, когда датчик 148 числа оборотов определяет, что транспортное средство остановилось или начало двигаться или изменило направления. Контроллер 140 подъема может изменить рабочее состояние одного или более данных устройств, когда датчик 148 числа оборотов обнаруживает, что транспортное средство 100 остановилось или начало двигаться или изменило направления. Например, контроллер 140 подъема может изменить рабочее состояние жатки 120 и объединяющего устройства 122, когда датчик 142 переключения или датчик 144 направления, или и то и другое, обнаруживает, что устройство 132 ввода направления передвинуто из положения вперед в нейтральное положение, из положения вперед в обратное положение, или из нейтрального в обратное положение.
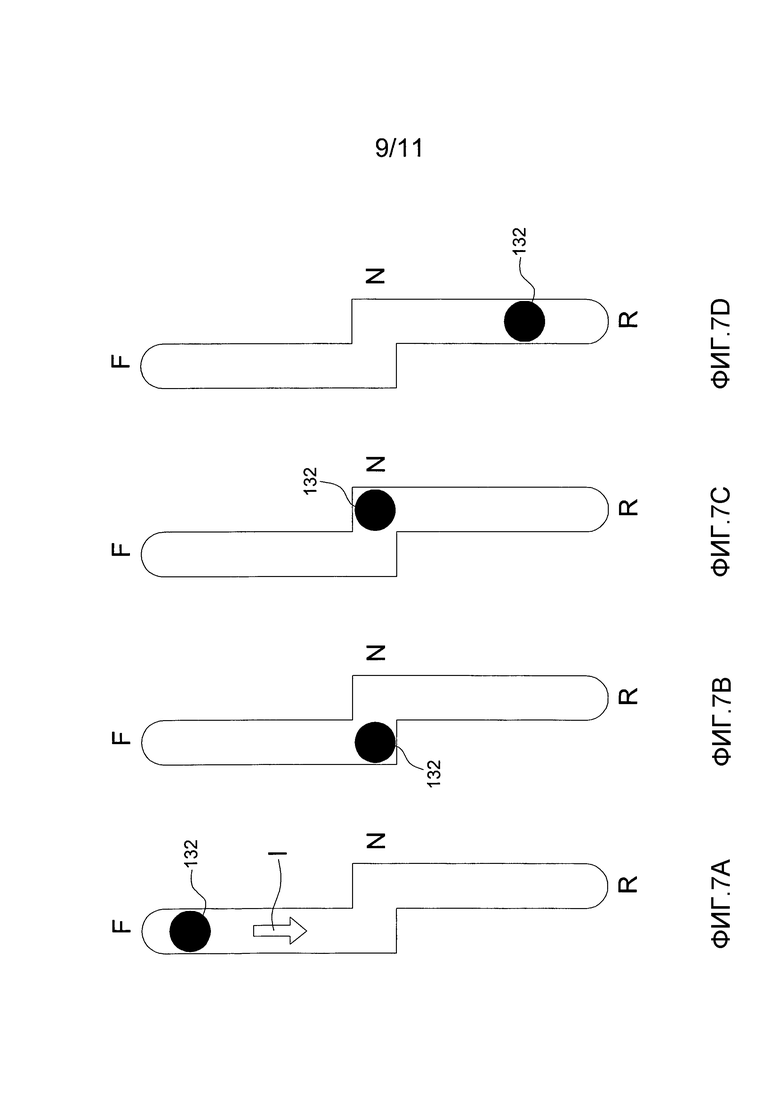
[0053] ФИГ. 7A иллюстрирует устройство 132 ввода направления в положении или режиме вперед. Вводимая оператором в устройство 132 ввода направления информация I может изменить положение или режим. ФИГ. 7B иллюстрирует устройство 132 ввода направления в нейтральном положении или режиме. ФИГ. 7B иллюстрирует устройство 132 ввода направления в другом нейтральном положении или режиме. ФИГ. 7D иллюстрирует устройство 132 ввода направления в обратном положении или режиме.
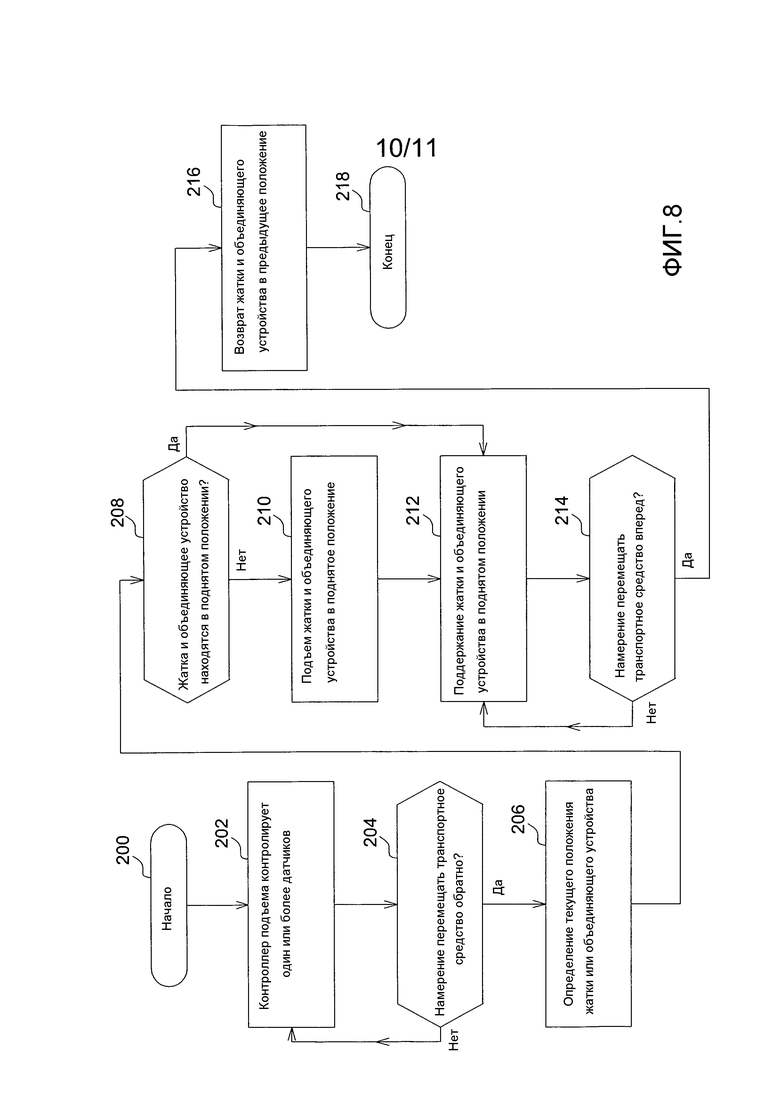
[0054] ФИГ. 8 иллюстрирует блок-схему способа переустановки устройства, соединенного с транспортным средством, согласно одному варианту осуществления, который может быть реализован в варианте осуществления, изображенном на одной или более следующих фигур: ФИГ. 5, ФИГ. 5A, ФИГ. 6 и ФИГ. 6A. На стадии 200, автоматизированная система переустановки включается, и способ начинается.
[0055] На стадии 202, контроллер 140 подъема контролирует один или более датчиков, устройств или и то и другое. Транспортное средство может быть неподвижным или перемещаться в любом направлении. Устройство 132 ввода направления может находиться в режиме вперед, как показано на ФИГ. 7A, и транспортное средство 100 будет перемещаться с соответствующей скоростью вперед. Устройство 132 ввода направления может находиться в нейтральном режиме, как показано на ФИГ. 7B или 7C.
[0056] На стадии 204 контроллер 140 подъема определяет намерение перемещать транспортное средство 100 в обратном или в другом нерабочем направлении. Как обсуждалось выше, контроллер 140 подъема может осуществлять подобное определение с использованием множества датчиков, устройств или и того и другого. Например, устройство 132 ввода направления может перемещаться из положения вперед на ФИГ. 7A в нейтральное положение на ФИГ. 7B или из нейтрального положения на ФИГ. 7B в нейтральное положение на ФИГ. 7C или из нейтрального положения на ФИГ. 7C в обратное положение на ФИГ. 7D.
[0057] На стадии 206, когда контроллер 140 подъема определяет намерение перемещать транспортное средство 100 в обратном или в другом нерабочем направлении, то контроллер 140 подъема определяет положение жатки 120, объединяющего устройства 122 или и того и другого. Дополнительно или в качестве альтернативы, контроллер 140 подъема может определять рабочее состояние жатки 120, объединяющего устройства 122 или и того и другого.
[0058] На стадии 208, контроллер 140 подъема определяет, поднимать ли или переустанавливать жатку 120, объединяющее устройство 122 или и то и другое по меньшей мере частично на основании положения жатки 120, объединяющего устройства 122 или и того и другого. Дополнительно или в качестве альтернативы, контроллер 140 подъема может разрешать изменение рабочего состояния жатки 120, объединяющего устройства 122 или и того и другого, например, отключать жатку 120 и объединяющее устройство 122.
[0059] На стадии 210, если жатка 120, объединяющее устройство 122 или и то и другое находятся в опущенном или другом рабочем положении, то контроллер 140 подъема переустанавливает жатку 120, объединяющее устройство 122 или и то и другое в поднятые или другие нерабочие положения. Дополнительно или в качестве альтернативы, если жатка 120, объединяющее устройство 122 или и то и другое находятся в рабочем состоянии, то контроллер 140 подъема отключает жатку 120, объединяющее устройство 122 или и то и другое в нерабочие состояния.
[0060] На стадии 212, если жатка 120, объединяющее устройство 122 или и то и другое находятся в поднятом или другом нерабочем положении, то контроллер 140 подъема поддерживает жатку 120, объединяющее устройство 122 или и то и другое в поднятом или другом нерабочем положении. Дополнительно или в качестве альтернативы, если жатка 120, объединяющее устройство 122 или и то и другое находятся в нерабочем состоянии, то контроллер 140 подъема поддерживает жатку 120, объединяющее устройство 122 или и то и другое в нерабочих состояниях.
[0061] На стадии 214, контроллер 140 подъема определяет намерение перемещать транспортное средство 100 в направлении вперед или в другом рабочем направлении. Со стадии 214, способ может переходить прямо на стадию 218 или продолжаться на стадии 216.
[0062] На стадии 216, когда контроллер 140 подъема определяет намерение перемещать транспортное средство 100 в направлении вперед или в другом рабочем направлении, тогда контроллер 140 подъема переустанавливает жатку 120, объединяющее устройство 122 или и то и другое в опущенное или в другие рабочие положения или переустанавливает жатку 120, объединяющее устройство 122 или и то и другое в их соответствующие положения перед поднятием или иным передвижением в нерабочие положения. Дополнительно или в качестве альтернативы, когда контроллер 140 подъема определяет намерение перемещать транспортное средство 100 в направлении вперед или в другом рабочем направлении, тогда контроллер 140 подъема переключает жатку 120, объединяющее устройство 122 или и то и другое в их соответствующие рабочие состояния. Со стадии 216, способ может вернуться на стадию 202 или продолжаться на стадии 218.
[0063] На стадии 218, способ переустановки устройства, соединенного с транспортным средством, завершается согласно одному варианту осуществления. В других вариантах осуществления, одна или более данных стадий или операций могут быть пропущены, повторены или переупорядочены и все-таки достигают необходимых результатов.
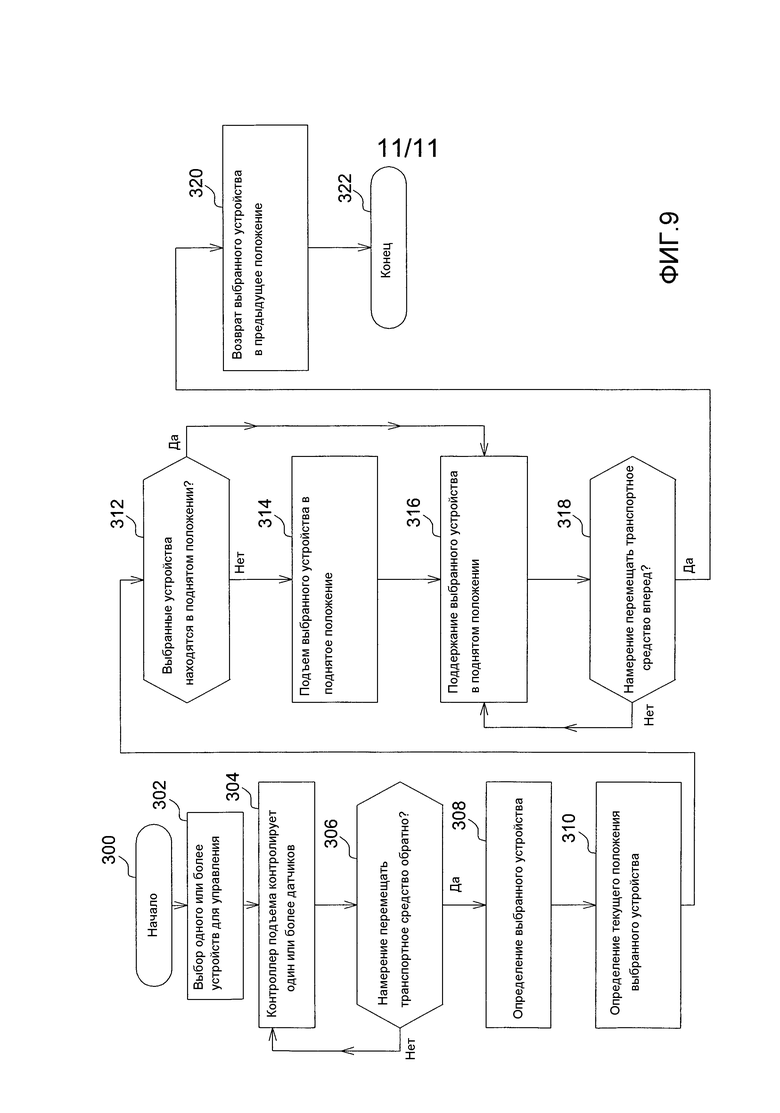
[0064] ФИГ. 9 иллюстрирует блок-схему способа переустановки устройства, соединенного с транспортным средством, согласно одному варианту осуществления, который может быть реализован в варианте осуществления, изображенном на одной или более следующих фигур: ФИГ. 5, ФИГ. 5A, ФИГ. 6 и ФИГ. 6A. На стадии 300, автоматизированная система переустановки включается, и способ начинается.
[0065] На стадии 302, выбирают одно или более устройств, соединенных с транспортным средством 100, для автоматического управления контроллером 140 подъема. В качестве альтернативы, если ни одно из устройств не выбрано для автоматического регулирования контроллером 140 подъема, то способ будет ожидать на стадии 302 до тех пор, пока не будет выбрано одно или более устройств или способ перейдет прямо на стадию 322, минуя другие стадии.
[0066] На стадии 304, контроллер 140 подъема контролирует один или более датчиков, устройств или и то и другое. Транспортное средство может быть неподвижным или перемещаться в любом направлении.
[0067] На стадии 306, контроллер 140 подъема определяет намерение перемещать транспортное средство 100 в обратном или в другом нерабочем направлении.
[0068] На стадии 308, когда контроллер 140 подъема определяет намерение перемещать транспортное средство 100 в обратном или в другом нерабочем направлении, то контроллер 140 подъема определяет, какие устройства в настоящее время выбраны для управления.
[0069] На стадии 310, контроллер 140 подъема затем определяет положение, состояние или и то и другое выбранных устройств.
[0070] На стадии 312, контроллер 140 подъема определяет, поднимать ли или переустанавливать выбранные устройства по меньшей мере частично на основании положения устройств. Дополнительно или в качестве альтернативы, контроллер 140 подъема определяет, отключать ли выбранные устройства по меньшей мере частично на основании рабочего состояния устройств.
[0071] На стадии 314, если выбранные устройства находятся в опущенных или рабочих положениях, то контроллер 140 подъема переустанавливает выбранные устройства в поднятые или другие нерабочие положения. Дополнительно или в качестве альтернативы, если выбранные устройства находятся в рабочем состоянии, то контроллер 140 подъема отключает выбранные устройства в нерабочее состояние.
[0072] На стадии 316, если выбранные устройства находятся в поднятых или других нерабочих положениях, то контроллер 140 подъема поддерживает выбранные устройства в поднятых или нерабочих положениях. Дополнительно или в качестве альтернативы, если выбранные устройства находятся в нерабочих состояниях, то контроллер 140 подъема поддерживает выбранные устройства в нерабочих состояниях.
[0073] На стадии 318, контроллер 140 подъема определяет намерение перемещать транспортное средство 100 в направлении вперед или в рабочем направлении. Со стадии 318, способ может переходить прямо на стадию 322 или продолжаться на стадии 320.
[0074] На стадии 320, когда контроллер 140 подъема определяет намерение перемещать транспортное средство 100 в направлении вперед или в рабочем направлении, то контроллер 140 подъема переустанавливает выбранные устройства в опущенные или рабочие положения или переустанавливает выбранные устройства в их соответствующие положения перед поднятием или передвижением в нерабочие положения. Дополнительно или в качестве альтернативы, когда контроллер 140 подъема определяет намерение перемещать транспортное средство 100 в направлении вперед или в другом рабочем направлении, то контроллер 140 подъема включает жатку 120, объединяющее устройство 122 или и то и другое в их соответствующие рабочие состояния. Со стадии 320, способ может вернуться на стадии 302 или продолжаться на стадии 322.
[0075] На стадии 322, способ переустановки устройства, соединенного с транспортным средством, завершается согласно одному варианту осуществления. В других вариантах осуществления, одна или более данных стадий или операций могут быть пропущены, повторены или переупорядочены и все-таки достигают необходимых результатов.
[0076] Не ограничивая никоим образом объем правовых притязаний, интерпретацию или применение формулы изобретения, приведенной ниже, техническим результатом одного или более иллюстративных вариантов осуществления, раскрытых в данной заявке, является автоматизированная система для подъема, опускания или переустановки иным образом одного или более устройств, соединенных с транспортным средством, когда транспортное средство вступает в действие в каком-то направлении или изменяет направление. Еще одним техническим результатом одного или более иллюстративных вариантов осуществления, раскрытых в данной заявке, является автоматизированная система, которая поднимает уборочную жатку и объединяющее устройство, при определении намерения перемещать транспортное средство в обратном направлении. Еще одним техническим результатом одного или более иллюстративных вариантов осуществления, раскрытых в данной заявке, является автоматизированная система, которая возвращает уборочную жатку и объединяющее устройство в их соответствующие рабочие положения, при определении намерения перемещать транспортное средство в направлении вперед или в рабочем направлении. Еще одним техническим результатом одного или более иллюстративных вариантов осуществления, раскрытых в данной заявке, является надежное устройство и способ автоматического подъема оборудования, прикрепленного к транспортному средству, когда транспортное средство движется в обратном направлении.
[0077] Терминология, используемая в данной заявке, предназначена для описания конкретных вариантов осуществления и не предназначена для ограничения изобретения. Как используется в данной заявке, единственное число также включает множественное число, если в контексте ясно не указано иное. Кроме того, следует понимать, что всякое использование терминов «имеет», «иметь», «имеющий», «включают», «включает», «включая», «содержат», «содержит», «содержащий» и тому подобное в данном описании идентифицирует наличие изложенных признаков, целых чисел, стадий, операций, элементов и/или составных элементов, но не препятствуют наличию или добавлению одного или более других признаков, целых чисел, стадий, операций, элементов, составных элементов и/или их групп.
[0078] Ссылки «A» и «B», используемые в данной заявке со ссылочными позициями, являются лишь пояснением при описании множества вариантов осуществления устройства.
[0079] Одна или более стадий или операций в любом из способов, процессов или систем, описанных в данной заявке, могут быть пущены, повторены или переупорядочены и находятся в пределах объема правовых притязаний представленного изобретения.
[0080] Несмотря на то, что выше описан иллюстративный вариантов осуществления представленного изобретения, данное описание не следует рассматривать в запрещающем или ограничивающем смысле. Наоборот, существует несколько вариантов и модификаций, которые могут быть сделаны без выхода за рамки объема правовых притязаний приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА С ДВИЖУЩЕЙСЯ В БОКОВОМ НАПРАВЛЕНИИ СКАТНОЙ ЗЕРНОВОЙ ДОСКОЙ | 2016 |
|
RU2729159C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ НАГРУЗКОЙ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЫ | 2014 |
|
RU2650537C2 |
| УБОРОЧНЫЙ КОМБАЙН С УСТРОЙСТВОМ ПРИЕМНОЙ КАМЕРЫ МОЛОТИЛКИ | 2014 |
|
RU2645224C2 |
| МАШИНА ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ С ПЛАВАЮЩЕЙ СИСТЕМОЙ НА ГИДРАВЛИЧЕСКИХ ЦИЛИНДРАХ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ (ВАРИАНТЫ) | 2017 |
|
RU2749775C1 |
| МАШИНА ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ С ПЛАВАЮЩЕЙ СИСТЕМОЙ НА ГИДРАВЛИЧЕСКИХ ЦИЛИНДРАХ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ | 2017 |
|
RU2762837C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ТЕХНИКИ | 2004 |
|
RU2282971C2 |
| РЕЖУЩАЯ СИСТЕМА С ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫМИ НОЖАМИ | 2008 |
|
RU2471330C2 |
| КОНСТРУКЦИЯ ШАРНИРНО-СОЧЛЕНЕННОЙ УБОРОЧНОЙ ЖАТКИ С ДАТЧИКОМ НАГРУЗКИ | 2014 |
|
RU2662285C2 |
| СИСТЕМА ПРИВОДА СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2016 |
|
RU2730031C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА С ВЫГРУЗКОЙ УСКОРЕННЫМ ПОЛОТЕННЫМ ТРАНСПОРТЕРОМ | 2010 |
|
RU2512307C2 |
Группа изобретений относится к сельскохозяйственному машиностроению. Сельскохозяйственное транспортное средство включает рамный элемент, с которым соединены уборочная жатка и объединяющее устройство, контроллер подъема в сообщении с датчиком направления, устройство ввода направления и селектор устройств для избирательного включения и отключения функции автоматической переустановки контроллера подъема. Устройство ввода направления регулирует направление сельскохозяйственного транспортного средства. Контроллер подъема автоматически переустанавливает уборочную жатку и объединяющее устройство в их рабочие или нерабочие положения. Группа изобретений облегчает работу оператора сельскохозяйственного транспортного средства. 2 н. и 17 з.п. ф-лы, 14 ил.
1. Сельскохозяйственное транспортное средство, содержащее:
рамный элемент;
уборочную жатку, соединенную с рамным элементом сельскохозяйственного транспортного средства, имеющего направление вперед и обратное направление;
объединяющее устройство, соединенное с рамным элементом сельскохозяйственного транспортного средства;
контроллер подъема в сообщении с датчиком направления, датчиком жатки, выполненным с возможностью определения положения уборочной жатки, и с датчиком объединяющего устройства, выполненным с возможностью определения положения объединяющего устройства, при этом контроллер подъема автоматически переустанавливает уборочную жатку и объединяющее устройство в нерабочие положения, когда контроллер подъема определяет намерение перемещать сельскохозяйственное транспортное средство в обратном направлении, а датчик жатки и датчик объединяющего устройства указывают, что уборочная жатка и объединяющее устройство находятся в рабочем состоянии, причем контроллер подъема откладывает переустановку объединяющего устройства до тех пор, пока уборочная жатка не начнет переустановку, и контроллер подъема переустанавливает уборочную жатку и объединяющее устройство в их рабочие положения, когда контроллер подъема определяет намерение перемещать сельскохозяйственное транспортное средство в направлении вперед;
устройство ввода направления, которое регулирует направление сельскохозяйственного транспортного средства, датчик направления, который определяет положение устройства ввода направления, контроллер подъема определяет намерение перемещать сельскохозяйственное транспортное средство в обратном направлении на основании положения устройства ввода направления, передаваемого датчиком направления, и
селектор устройств, который предварительно выбирает одно или более из уборочной жатки и объединяющего устройства, которое автоматически переустанавливает контроллер подъема, причем селектор устройств избирательно включает и отключает функцию автоматической переустановки контроллера подъема.
2. Сельскохозяйственное транспортное средство по п. 1, в котором объединяющее устройство расположено под рамным элементом сельскохозяйственного транспортного средства и между передним и задним соприкасающимися с землей устройствами.
3. Сельскохозяйственное транспортное средство по п. 1, в котором контроллер подъема откладывает переустановку объединяющего устройства в течение определенного периода времени после начала переустановки уборочной жатки.
4. Сельскохозяйственное транспортное средство по п. 1, в котором контроллер подъема откладывает переустановку объединяющего устройства до тех пор, пока уборочная жатка не достигнет конкретного положения относительно сельскохозяйственного транспортного средства.
5. Сельскохозяйственное транспортное средство по п. 1, в котором контроллер подъема полностью переустанавливает уборочную жатку относительно сельскохозяйственного транспортного средства перед началом переустановки второго объединяющего устройства.
6. Сельскохозяйственное транспортное средство по п. 1, дополнительно содержащее
дефлектор, соединенный с сельскохозяйственным транспортным средством, причем селектор устройств предварительно выбирает одно или более из уборочной жатки, объединяющего устройства и дефлектора, которые автоматически переустанавливают контроллер подъема.
7. Сельскохозяйственное транспортное средство по п. 6, в котором селектор устройств предварительно выбирает уборочную жатку и объединяющее устройство, которые автоматически переустанавливают контроллер подъема.
8. Сельскохозяйственное транспортное средство по п. 6, в котором селектор устройств предварительно выбирает объединяющее устройство и дефлектор, которые автоматически переустанавливают контроллер подъема.
9. Сельскохозяйственное транспортное средство по п. 6, в котором селектор устройств предварительно выбирает уборочную жатку и дефлектор, которые автоматически переустанавливают контроллер подъема.
10. Сельскохозяйственное транспортное средство по п. 6, в котором селектор устройств предварительно выбирает уборочную жатку, объединяющее устройство и дефлектор, которые автоматически переустанавливают контроллер подъема.
11. Сельскохозяйственное транспортное средство по п. 1, в котором контроллер подъема сообщается с датчиком вала отбора мощности для определения вращения или скорости вращения вала отбора мощности, чтобы указать находятся ли уборочная жатка и объединяющее устройство в рабочем состоянии.
12. Сельскохозяйственное транспортное средство по п. 1, в котором контроллер подъема дополнительно сообщается с датчиком трансмиссии, содержащим один или более датчиков числа оборотов для измерения числа оборотов трансмиссионных валов и определения намерения перемещения сельскохозяйственного транспортного средства в обратном направлении.
13. Способ переустановки уборочного устройства, соединенного с сельскохозяйственным транспортным средством, включающий:
предварительный выбор уборочной жатки и объединяющего устройства для автоматической переустановки;
определение, имеется ли намерение перемещать сельскохозяйственное транспортное средство в обратном направлении посредством определения положения устройства ввода направления датчиком;
определение положений уборочной жатки и объединяющего устройства и, если уборочная жатка и объединяющее устройство находятся в их соответствующих рабочих положениях, автоматическую переустановку уборочной жатки и объединяющего устройства в нерабочие положения по меньшей мере частично на основании намерения перемещать сельскохозяйственное транспортное средство в обратном направлении и откладывание переустановки объединяющего устройства до тех пор, пока уборочная жатка не начнет переустановку;
определение, имеется ли намерение перемещать сельскохозяйственное транспортное средство в направлении вперед посредством определения положения устройства ввода направления датчиком, и
автоматическую переустановку уборочной жатки и объединяющего устройства в их соответствующие рабочие положения.
14. Способ по п. 13, в котором этап автоматической переустановки включает откладывание переустановки объединяющего устройства в течение определенного периода времени после начала переустановки уборочной жатки.
15. Способ по п. 13, в котором этап автоматической переустановки включает откладывание переустановки объединяющего устройства до тех пор, пока уборочная жатка не достигнет конкретного положения относительно сельскохозяйственного транспортного средства.
16. Способ по п. 13, в котором этап автоматической переустановки включает полную переустановку уборочной жатки относительно сельскохозяйственного транспортного средства перед началом переустановки объединяющего устройства.
17. Способ по п. 13, в котором этап предварительного выбора дополнительно включает предварительный выбор дефлектора для автоматической переустановки.
18. Способ по п. 13, в котором этап определения положений уборочной жатки и объединяющего устройства дополнительно включает определение вращения или скорости вращения вала отбора мощности для того, чтобы указать находятся ли уборочная жатка и объединяющее устройство в рабочем состоянии.
19. Способ по п. 13, в котором этап определения имеется ли намерение перемещать сельскохозяйственное транспортное средство дополнительно включает измерение числа оборотов трансмиссионных валов сельскохозяйственного транспортного средства.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 8109068 B2, 07.02.2012 | |||
| US 4594840 A, 17.06.1986, | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА С ЗАПУСКОМ ИЗМЕНЕНИЯ НАПРАВЛЕНИЙ ДВИЖЕНИЯ ЛЕНТОЧНОЙ ПЛАТФОРМЕННОЙ ЖАТКИ, ГИДРАВЛИЧЕСКИЙ РЫЧАГ И СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ПЛАТФОРМЕННОЙ ЖАТКИ | 2010 |
|
RU2528953C2 |

