Область техники, к которой относится изобретение
Изобретение относится к области радиоэлектроники и может быть использовано для подавления помех в приемниках спутниковых навигационных сигналов, в частности GPS, ГЛОНАСС, Galileo и Compass. Изобретение также может быть использовано для других спутниковых навигационных систем, работающих в соответствии с аналогичными принципами.
Уровень техники
В настоящее время сфера применения спутниковых радионавигационных систем (СРНС), таких как GPS и ГЛОНАСС, а также Galileo и Compass, постоянно расширяется за счет улучшения характеристик навигационных приемников, что достигается совершенствованием алгоритмов обработки навигационных сигналов и использованием навигационной аппаратуры в составе комплексов. В частности, к навигационным приемникам предъявляются требования по приему слабых сигналов в условиях затенения (например, в лесу, в городских и природных каньонах) и в помещениях.
По мере того как приемники становятся все более высокочувствительными, даже слабый уровень узкополосных помех от бытовой электроники оказывает негативное влияние на обнаружение и сопровождение навигационных сигналов.
Это вызвано тем, что передатчик, установленный на навигационном спутнике, имеет небольшую мощность. Например, мощность навигационного сигнала GPS составляет примерно 50 Вт. При этом спутник находится на расстоянии 20000 км от поверхности Земли. Это приводит к тому, что гарантированная мощность принятого навигационного сигнала под открытым небом составляет всего 10-16 Вт или - 130 дБм. При перемещении приемника в помещение мощность принятого сигнала оказывается еще на 20-40 дБ меньше. Поэтому даже помеха довольно низкой мощности, оказавшись на частоте полезного сигнала, может полностью нарушить работу навигационного приемника.
Повышенная чувствительность навигационного приемника к узкополосным помехам объясняется спектральными свойствами гражданского кода GPS, кода стандартной точности ГЛОНАСС и аналогичных кодов, применяемых в навигационных системах Galileo и Compass. Будучи периодическими, эти коды приводят к линейчатости спектра передаваемого спутниками навигационного сигнала. Аналогичными свойствами обладают и частотные характеристики согласованных фильтров корреляторов. Совпадение частоты узкополосной помехи с локальным максимумом частотной характеристики согласованного фильтра коррелятора способно причинить приемнику существенно больший вред, нежели обычный тепловой шум той же мощности. При этом алгоритмы повышения чувствительности приемника, эффективные при наличии только белого шума, оказываются неспособными противодействовать узкополосным помехам.
Одним из источников помех являются тактовые генераторы массовых цифровых устройств, таких как персональные компьютеры, ноутбуки, смартфоны и планшетные компьютеры. Другим источником помех являются импульсные источники питания и мониторы (дисплеи). Процессы, происходящие в указанных устройствах, носят квазипериодический характер, что приводит к тому, что порождаемые ими помехи оказываются сосредоточенными по спектру, т.е. узкополосными. Источниками помех также являются передатчики базовых станций мобильной связи, способные создавать помехи, многократно превышающие по мощности уровень теплового шума в малошумящем усилителе приемника.
Наиболее опасными являются помехи от электронного оборудования, спектр которых попадает в те же диапазоны частот, которые занимают спутниковые навигационные сигналы. Чем выше чувствительность навигационного приемника, тем сильнее влияние узкополосных помех на его работу при приеме слабых сигналов, так как увеличивается количество опасных узкополосных помех, присутствующих практически в любом помещении с электронным оборудованием. Если при уровне сигнала спутника - 160 дБм, влияющих на его сопровождение узкополосных помех в среднестатистическом помещении с электронным оборудованием единицы, то при уровне сигнала спутника - 170 дБм таких помех уже десятки.
Таким образом, задача высокоэффективного и в то же время нересурсоемкого подавления узкополосных помех для коммерческих навигационных приемников является актуальной.
Сигналы спутниковых навигационных систем, таких как GPS, ГЛОНАСС, Galileo и Compass, занимают широкую полосу частот благодаря использованию технологии расширения спектра. В отличие от полезных навигационных сигналов мешающие сигналы помех обычно являются узкополосными (сосредоточенными по спектру), и, как уже было отмечено, именно узкополосные помехи представляют наибольшую опасность для приемников. Различие в форме спектра создает условия для выделения полезного сигнала в присутствии узкополосных помех.
Для эффективного выделения навигационных сигналов в состав приемника вводят дополнительные модули, предназначенные для обнаружения и подавления узкополосных помех. Подавление помех до их попадания в корреляторы является самым надежным и одновременно самым дорогим способом борьбы с помехами.
Более дешевый способ для определения и борьбы с узкополосной помехой приведен в патенте [1]. Метод заключается в наблюдении за несколькими индикаторами наличия помехи. Один из них - это соотношение изменения температуры с изменением скорости ухода часов приемника. Этот метод индикации основывается на том, что скорость ухода изменяется в соответствии с небольшими изменениями температуры, а если произошло резкое изменение скорости ухода, то это является индикатором наличия помехи. Другой индикатор реализуется за счет наблюдения за соотношением сигнал-шум. Этот метод индикации основывается на том, что, если это соотношение резко падает, больше, чем заранее установленное значение (например, 3 дБ), значит присутствует сигнал помехи. Еще один индикатор реализуется за счет наблюдения за выходом коррелятора. Выполняется корреляция принятого GPS сигнала с ПСП в первом корреляторе. При этом выход первого коррелятора указывает, что ПСП присутствует в принятом сигнале GPS. Корреляция принятого GPS сигнала со сдвинутой по задержке версией ПСП во втором корреляторе используется для индикации помехи. Задержка должна быть достаточной для того, чтобы выход второго коррелятора показывал, что сдвинутая по задержке ПСП отсутствует в принятом сигнале. Индикатором присутствия помехи является падение выходного значения первого коррелятора, которое совпадает с увеличением выходного значения второго коррелятора. Следующий метод индикации наличия помехи основывается на корреляции входного сигнала GPS с ПСП кодом, не принятым GPS приемником. Это код, не соответствующий 32 используемым кодам, т.е. код, зарезервированный для иных применений. Кроме того, используя данные альманаха, содержащего информацию о позиции всех спутников в системе, можно выбрать спутник, который не входит в диапазон приема приемника, и использовать его ПСП. При отсутствии помехи и при достаточно сильном сигнале корреляция с неиспользуемой ПСП покажет низкое значение. Когда помеха присутствует, корреляция покажет высокое значение. Чем больше корреляторов, которые показывают рост значения, тем больше вероятность наличия помехи. Еще один метод индикации наличия помехи состоит в наблюдении за мощностью сигнала: соотношение мощности принимаемого сигнала с показателями мощности сигнала, которые хорошо известны. Резкое увеличение мощности сигнала укажет на паразитный сигнал и источник помех. Методы классификации помехи могут комбинироваться, так как надежнее иметь два (или более) индикатора для лучшего подтверждения наличия помехи.
Если помеха обнаружена, то могут быть приняты контрмеры. Простейшая из них - это блокирование работы приемника на время действия узкополосных помех. Таким образом избегают ошибочных скачков в позиции или в скорости. На дисплее устройства может выводиться сообщение о наличии сигнала помехи и может отображаться последняя правильная позиция. Оно также может означать, что корректная позиция недоступна. Навигационное устройство также может использовать альтернативный метод навигационного вычисления в течение активной фазы узкополосных помех, в котором определяется позиция как результат последней известной правильной позиции, последнего известного направления движения и последней известной скорости. Недостатком изложенного метода является то, что в нем не производится действительное подавление узкополосных помех, а вероятность их детектирования зависит от количества индикаторов. Детектирование и противодействие помехам без их подавления во входном сигнале является наиболее экономичным, но и наименее эффективным методом борьбы с помехами.
Метод обнаружения и подавления узкополосных помех до их попадания на вход корреляторов приведен в патенте [2]. В патенте описывается система подавления узкополосных помех для использования в широкополосном приемнике. Система подавления включает в себя средство для преобразования принятого сигнала из временной области в частотную, средство для подавления помеховых компонент в частотной области, превышающих порог, средство для определения порога и средство для восстановления сигнала путем преобразования из частотной области во временную.
Принцип действия основан на том, что узкополосные помехи во входном сигнале преобразуются в сильные «импульсные», т.е. дискретные компоненты в частотной области. Дискретные компоненты, имеющие амплитуды, превышающие порог, подавляются в частотной области. Пороговый уровень определяется путем усреднения амплитуды принятого сигнала во временной области. Обратное преобразование сигнала из частотной области в когерентный непрерывный выходной сигнал во временной области дает сигнал, практически равный принятому сигналу со значительно сниженными компонентами узкополосной помехи.
Согласно патенту схема подавления помеховых компонент в частотной области состоит из нелинейного устройства одностороннего ограничения. Преобразование принятого сигнала из временной области в частотную область выполнятся посредством модуляции принятого сигнала с помощью линейной частотной модуляции (ЛЧМ). Обратное преобразование, восстанавливающее сигнал, включает в себя фильтр с импульсной характеристикой, которая является инвертированной во времени комплексно-сопряженной копией импульсной характеристики первого линейного фильтра.
Данная система подавления узкополосной помехи является одним из видов системы режекции помехи в частотной области, которая обеспечивает непрерывное подавление узкополосных компонент помехи в пределах полосы входного сигнала. Кроме того, за исключением задержки система позволяет в режиме «реального времени» подавлять помехи без предварительного знания частот, фаз или амплитуды компонентов помехи. Однако система подавления узкополосных помех, описанная в патенте [2], имеет существенный недостаток - повышенные требования к вычислительным ресурсам.
Метод для обнаружения и устранения узкополосных помех в частотной области представлен в патенте [3]. В основу метода положена нелинейная амплитудно-частотная фильтрация в реальном времени с помощью технологии быстрого преобразования Фурье (БПФ). Принятый сигнал оцифровывается и преобразуется в частотную область с помощью БПФ. Выходом БПФ является набор комплексных (реальных и мнимых) чисел, представляющих собой частотные компоненты оцифрованного сигнала. Алгоритм подавления помехи состоит из трех этапов. На первом этапе преобразователь в полярную форму сигнала раскладывает сигнал на его амплитудную и фазовую компоненты. На следующем этапе амплитуда сигнала нормируется, что позволяет устранить узкополосные помехи с большой амплитудой. На последнем этапе сигнал преобразуется из полярного системы координат в прямоугольную с амплитудой, установленной в некоторое произвольное значение, что является необходимым для возврата в нормированный спектр. Так как нет необходимости рассчитывать порог, не требуется дополнительного расхода вычислительного ресурса. Каждая точка данных обрабатывается без задержки времени. Очищенный от помех сигнал преобразуется с помощью обратного БПФ во временную область.
Недостатком данной системы подавления узкополосных помех является требование больших аппаратных ресурсов, в том числе памяти, что затрудняет ее реализацию, а также существенное искажение полезного сигнала.
Другим направлением создания помехоустойчивых навигационных приемников является адаптивная фильтрация сигнала перед первичной обработкой. В таких устройствах используется перестраиваемый режекторный фильтр, выполняющий функции обеления помехи. Такой алгоритм реализован в приемнике радиосигналов с расширенным спектром методом прямой последовательности (Direct Sequence Spread Spectrum, или DSSS), описанном в патенте [4]. Режекция одной или более узкополосных помех выполняется, основываясь на спектральном анализе амплитуды сигналов в канале обнаружения. Для обозначения результатов спектрального анализа используется англоязычный термин "frequency bin" или просто "bin", означающий элемент разрешения по частоте. Здесь и далее для обозначения компонент спектра используется термин "бин" или "частотный бин". Для определения, какие частотные компоненты спектрального анализа содержат помеховые сигналы, амплитуды частотных бинов сравниваются с порогом. Частотные бины с помехой определяются амплитудами, превышающими порог. Режекторные фильтры вырезают соответствующие узкополосные помехи.
Входной сигнал может состоять из полезного сигнала расширенного спектра и одной или большего числа мощных сосредоточенных по спектру помех. Приемник с управляющим сигналом автоматической регулировки усиления (АРУ) поддерживает постоянный уровень входного сигнала. Входной сигнал вначале преобразуется в сигнал промежуточной частоты, затем оцифровывается и преобразуется в квадратурный (I/Q) сигнал.
Устройство состоит из двух каналов, канала обнаружения помехи и сигнального канала. Сигнал поступает в оба канала одновременно. В канале обнаружения помехи выполняется спектральный анализ I/Q сигнала. Детектор амплитуды определяет амплитуды I/Q сигнала в частотных бинах. Попутно по информации об амплитуде в частотных бинах вырабатывается сигнал автоматической регулировки усиления (АРУ). Затем амплитуда частотного бина сравнивается с порогом и определяется номер бина, содержащего узкополосные помехи.
Сигнальный канал содержит линию задержки и частотно-избирательные режекторные фильтры. Режекторные фильтры служат для вырезания одного или более узкополосных сигналов в соответствии с номерами частотных бинов, содержащих помехи. Режекторные фильтры реализованы в виде двух банков действительных цифровых фильтров. Один банк фильтров служит для фильтрации синфазной (I) компоненты сигнала, а другой - для фильтрации квадратурной (Q) компоненты. Каждый фильтр банка использует архитектуру многоступенчатого дециматора-интерполятора. Банк режекторных фильтров реализован как банк полосовых фильтров и параллельно включенной с ними линии задержки. Время задержки равно половине длительности импульсной характеристики полосовых фильтров. Выход банка полосовых фильтров вычитается их выхода линии задержки. Эта операция и реализует банк режекторных фильтров.
Весовые коэффициенты фильтров хранятся в памяти для различных центральных частот и загружаются в фильтры в зависимости от частоты подавляемых помех.
После режектирования помехи демодулятор выполняет демодуляцию сигнала расширенного спектра для получения оценки желаемого сигнала.
Преимущество такого алгоритма вырезания узкополосых помех состоит в использовании простого алгоритма анализа амплитуды спектра. Недостатком данного способа подавления помех является то, что использование многоступенчатых цифровых фильтров требует применения многоразрядных умножителей, причем количество операций весьма велико, так как приходится вычислять свертку входного сигнала с импульсной характеристикой фильтра, что необходимо для реализации фильтрации сигнала. Другим недостатком являются повышенные потребности памяти для хранения весовых коэффициентов. Таким образом, для реализации данного подавителя помех требуются большие аппаратные ресурсы, что приводит к увеличению потребляемой мощности.
Еще одним примером адаптивной фильтрации сигнала перед первичной обработкой является адаптивный трансверсальный фильтр (АТФ), описанный в патенте [5]. На вход фильтра поступает сигнал, оцифрованный в многоразрядном аналого-цифровом преобразователе (АЦП) и содержащий смесь полезных сигналов с расширенным спектром, теплового шума и узкополосных помех.
Цифровой входной сигнал фильтруется с помощью цифрового фильтра с конечной импульсной характеристикой (КИХ), используя ранее вычисленные весовые коэффициенты фильтра. Фильтр выдает цифровой сигнал, который содержит уменьшенное количество частично подавленных узкополосных помех. Степень подавления узкополосной помехи возрастает с увеличением ее мощности. Веса цифрового фильтра вырабатываются рекурсивно путем обновления предыдущих весов посредством произведения цифрового модулирующего сигнала и цифрового выходного сигнала. Предотвращение чрезмерного дрейфа цифровых весов выполнено за счет периодического сброса весов в нулевое начальное значение и повторной инициализации.
Недостатком использования АТФ является то, что для эффективного помехоподавления требуется фильтр с импульсной характеристикой большой длины, что значительно увеличивает стоимость приемника.
Еще одним примером адаптивной фильтрации сигнала является фильтр линейного кодирования с предсказанием (ЛКП фильтр), описанный в патенте [6]. Периодические и квазипериодические сигналы, действующие, как помеха, эффективно отфильтровываются с помощью ЛКП фильтра. ЛКП фильтр получает принятый оцифрованный сигнал и выдает набор коэффициентов предсказания и набор коэффициентов ошибки. Предсказанные коэффициенты позволяют представить периодический и/или квазипериодический сигналы помехи. Разность между входным сигналом и предсказанным сигналом называется остатком или ошибкой предсказания и является выходным сигналом, содержащим полезные передаваемые данные, находящиеся в сигнале расширенного спектра.
По сравнению с АТФ - это более дешевая реализация подавления узкополосных помех. Однако недостатком такого алгоритма является то, что эффективность помехоподавления уменьшается при увеличении количества узкополосных помех, если их становится больше, чем количество коэффициентов ЛКП фильтра. Кроме того, использование многоразрядных умножений значительно увеличивает сложность приемника.
Еще одним примером адаптивной фильтрации сигнала является использование фильтра с бесконечной импульсной характеристикой (БИХ), описанное в статье [7]. Алгоритм использует адаптивный режекторный фильтр (АРФ), который способен обнаруживать, оценивать и вырезать одиночную незатухающую гармоническую помеху. Модуль АРФ состоит из простого фильтра с бесконечной импульсной характеристикой (БИХ) второго порядка с решетчатой структурой. При отсутствии сигнала помехи принимаемый сигнал пойдет в обход АРФ модуля, так что ухудшение соотношения сигнал-шум, вызванное АРФ, можно избежать. Представленный алгоритм обнаружения и оценки незатухающей гармонической помехи работает во временной области. Благодаря этому не надо выполнять преобразование из временной в частотную область, вследствие чего уменьшается аппаратная сложность. Предложенная схема может подавлять множественные незатухающие гармонические помехи с помощью каскадного модуля АРФ. Порог обнаружения незатухающей гармонической помехи определяется в соответствии с соотношением сигнал-шум и приемлемой вероятностью ложного срабатывания. Оценка погрешности мощности помехи уменьшается, когда отношение мощности помехи к сигналу растет. Когда появляется несколько незатухающих гармонических помех, предложенный модуль АРФ будет адаптивно регулировать вырезание спектральной составляющей с частотой самой сильной незатухающей гармонической помехи, появляющейся на его входе.
Таким образом, предлагаемый АРФ модуль не требует сложных блоков БПФ, но недостатком алгоритма является то, что нужно следить не только за частотой, но и за амплитудой и фазой. Малейшее изменение частоты приводит к деградации подавления. Кроме того, высокодобротные фильтры требуют очень точных многоразрядных умножений, что увеличивает аппаратные ресурсы. Эффективность подавления множества узкополосных помех зависит от их взаимоположения, т.е. если они расположены одна рядом с другой, то АРФ будет реагировать на соседний узкополосный сигнал. К тому же приемники ГЛОНАСС особо чувствительны к искажению фазочастотной характеристики, поэтому рекурсивные БИХ фильтры использовать в схеме подавления узкополосных помех весьма проблематично.
Необходимо учитывать тот факт, что внутри помещения с электротехническим оборудованием присутствует большое число узкополосных помех и эти помехи нестабильны, особенно при перемещении антенны приемника. Вследствие этого необходимо постоянно переоценивать наличие узкополосных помех, как это описано в патенте [8]. Адаптивное подавление нежелательных сигналов в динамической помеховой среде реализуется на основе КИХ фильтра. Этот метод может отслеживать относительно быстрые изменения в помеховой обстановке и вырезать кратковременные узкополосные сигналы, присутствующие в широкополосном сигнале.
В патенте [8] КИХ фильтр реализован в частотной области путем выполнения БПФ сигнала, умножения его на передаточную функцию в частотной области и затем выполнения обратного БПФ. Передаточная функция динамически вычисляется в реальном времени путем определения энергии сигнала в частотной области и исключения бинов, которые содержат помеху. Сигнал задержан на время, требуемое для вычисления передаточной функции. Поэтому относительно быстрые изменения в помеховой среде могут быть отслежены и режектированы.
Еще один метод подавления помех - это компенсация. Этот метод построен на принципе выделения помехи гармонического типа из смеси полезного сигнала с помехой и шумом и компенсации помехи за счет вычитания. В схеме подавителя, описанного в патенте [9], применяется способ выделения помехи при помощи генератора, формирующего помехоподобный сигнал. Отличительной особенностью метода является наличие генератора с фазовой подстройкой частоты (ФАПЧ). Поскольку предполагается, что мощность помехи на входе существенно больше мощности полезного сигнала, генератор управляется непосредственно входным сигналом либо предварительно отфильтрованным входным сигналом. Генератор помехоподобного сигнала формирует сигнал, максимально приближенный по мгновенному значению к помехе. Для этого необходимо отслеживать мгновенные значения трех основных параметров помехи - амплитуды, частоты и фазы. В данном методе к точности оценки мгновенных значений амплитуды и фазы предъявляются очень высокие требования.
Достоинством подобных схем является их способность компенсировать помеху, внося минимальные искажения в полезный сигнал. Однако амплитудная или фазовая нестабильность помехи делает применение данного метода нецелесообразным. Таким образом, одним из основных недостатков метода компенсации является сильное ограничение, налагаемое на класс подавляемых помех.
Для решения задачи подавления узкополосных помех требуется применение алгоритмов цифровой обработки, оптимизированных для работы на программно-аппаратной платформе с ограниченными вычислительными ресурсами и объемом памяти, занимающих мало места при реализации на СБИС и отличающихся малым потреблением.
Из рассмотренных технических решений в качестве прототипа выбран способ режекции узкополосных помех, описанный в патенте [4], как наиболее близкий к предлагаемому устройству.
Раскрытие изобретения
Предлагаемым изобретением решается задача создания устройства подавления узкополосных помех в спутниковом навигационном приемнике. Особенностью предлагаемого изобретения является экономия аппаратных ресурсов и снижение вычислительных затрат с помощью вычисления прямого дискретного преобразования Фурье (ДПФ) и обратного дискретного преобразования Фурье (ОДПФ) для неполного набора частот. Важно подчеркнуть, что использование в предлагаемом изобретении ДПФ и ОДПФ для неполного набора частот является более эффективным с точки зрения экономии вычислительных затрат, чем быстрое преобразование Фурье (БПФ), которое применяют в некоторых аналогичных устройствах.
Другой особенностью предлагаемого изобретения является вычисление ДПФ в реальном времени. При поступлении очередного входного отсчета получаются промежуточные результаты ДПФ и вычисляются в реальном времени выходные отсчеты ОДПФ на основе ранее сформированных результатов ДПФ. Это приводит к экономии памяти, к равномерному формированию выходных отсчетов и устраняет пиковые вычислительные нагрузки. Благодаря экономии аппаратных ресурсов и снижению вычислительных затрат уменьшается и потребляемая мощность. В силу этих обстоятельств описываемое устройство может быть применено в спутниковых навигационных приемниках, используемых в мобильных приложениях, например смартфонах, планшетных компьютерах и других устройствах, для которых экономия аппаратных ресурсов и потребляемой мощности является наиболее важным требованием.
Перечисленные выше задачи решаются настоящим изобретением в предположении, что динамика объекта, на котором установлен навигационный приемник, не слишком высока. Примером таких объектов могут быть автомобили или гражданские самолеты. В этом случае распределение узкополосных помех по спектру можно считать относительно постоянным, а ускорение приемника и производную от ускорения при его перемещении в пространстве - незначительными.
Сущность предлагаемого изобретения заключается в следующем.
На вход устройства подавления узкополосных помех поступает цифровой квадратурный сигнал, принятый радиочастотным модулем спутникового навигационного приемника. В общем случае входной сигнал представляет собой смесь полезного навигационного сигнала, широкополосного шума приемника и одной или нескольких узкополосных помех. Устройство подавления узкополосных помех содержит анализатор спектра входного сигнала, блок выделения помех, блок режекции помех и блок памяти для хранения входных отсчетов. Вход устройства подавления узкополосных помех соединен с входом анализатора спектра, с первым входом блока режекции помех и с входом блока памяти. Выход анализатора спектра соединен с входом блока выделения помех, а выход блока выделения помех соединен со вторым входом блока режекции помех. Выход блока памяти соединен с третьим входом блока режекции помех. Выход блока режекции помех является выходом устройства подавления узкополосных помех. Выходной сигнал устройства подавления узкополосных помех, очищенный от помех, поступает на блоки поиска и сопровождения спутникового навигационного приемника.
Блок анализатора спектра выполняет преобразование входного сигнала из временной области в частотную область. С этой целью блок анализатора спектра содержит первый модуль дискретного преобразования Фурье (ДПФ), вход и выход которого соединены соответственно с входом и выходом блока анализатора спектра. Особенностью предлагаемого изобретения является то, что блок анализатора спектра в реальном времени вычисляет ДПФ входного сигнала для набора частот {F}={F1, F2, …, FScanMax}, являющихся частотными бинами N-точечного ДПФ, причем величина ScanMax меньше длины ДПФ N, а набор частот {F} после каждого вычисления ДПФ изменяется таким образом, что за N/FScanMax итераций перебираются все N частотных бинов. Благодаря относительной стационарности спектра помех удается анализировать спектр по частям, а не целиком, за счет чего снижаются вычислительные затраты. Результаты ДПФ передаются в блок выделения помех.
Блок выделения помех определяет наличие узкополосных помех посредством сравнения амплитуды спектральной компоненты на выходе ДПФ с порогом и формирует набор частот 
Этот набор частот поступает в блок режекции помехи через его второй вход. Также в этот блок на его первый вход поступает входной цифровой квадратурный сигнал, а на его третий вход поступает сигнал с выхода блока памяти, являющийся задержанным входным сигналом. Блок режекции помех содержит второй модуль ДПФ, модуль обратного ДПФ (ОДПФ) и сумматор с инвертирующим и неинвертирующим входами. Первый вход второго модуля ДПФ соединен с первым входом блока режекции помех. Выход второго модуля ДПФ соединен со входом модуля ОДПФ. Вторые входы второго модуля ДПФ и модуля ОДПФ соединены со вторым входом блока режекции помех. Выход блока ОДПФ соединен с инвертирующим входом сумматора. Неинвертирующий вход сумматора соединен с третьим входом блока режекции помех, а выход сумматора является выходом блока режекции помех.
Подавление узкополосных помех, частоты которых входят в набор частот {F'}, выполняется в блоке режекции помех. Второй модуль ДПФ вычисляет ДПФ входного сигнала для набора частот 
Так как набор частот ограничен определенным числом, то N-точечные ДПФ и ОДПФ можно выполнить с помощью таблиц соответствия (look up table или LUT). Это позволяет избежать вычислений тригонометрических функций, уменьшить время расчета и сократить вычислительные нагрузки.
Один из вариантов реализации данного изобретения отличается тем, что блок памяти для входных отсчетов реализован в виде циркулярного буфера, длина которого равна длине ДПФ N. При этом N-точечное ДПФ в первом и втором модуле ДПФ вычисляются по мере поступления входных отсчетов на вход блока памяти для хранения входных отсчетов, постепенно формируя результаты для ScanMax и SuprMax частотных бинов. Для хранения указанных результатов в каждом модуле ДПФ содержатся блоки памяти для промежуточных результатов ДПФ на ScanMax и SuprMax элементов соответственно. При этом выходы первого и второго блока ДПФ соединены с входами соответствующих блоков памяти. N-точечное ОДПФ также вычисляется по мере поступления входных отсчетов на вход блока памяти для хранения входных отсчетов и содержит блок памяти для хранения результатов ДПФ для SuprMax частотных бинов, используемых модулем ОДПФ в качестве входных параметров. Выход блока памяти для хранения результатов ДПФ соединен с входом модуля ОДПФ. Выход блока памяти для промежуточных результатов второго модуля ДПФ и вход блока памяти для хранения результатов ДПФ связаны между собой переключателем.
Другим отличием данного варианта реализации является то, что при поступлении нового входного отсчета в блок памяти для хранения входных отсчетов из циркулярного буфера вычитывается входной отсчет, поступивший на N тактов ранее текущего. При поступлении N-го входного отсчета вычисление N-точечного ДПФ в первом и втором модуле ДПФ завершается и промежуточные результаты ДПФ второго модуля копируются в блок памяти для результатов ДПФ модуля ОДПФ, после чего блок памяти для промежуточных результатов ДПФ в обоих модулях ДПФ обнуляется.
Результатом данных вариантов реализации является двойная экономия памяти блока входных отсчетов за счет небольшого наращивания памяти для результатов ДПФ для ScanMax и SuprMax частотных бинов. Благодаря экономии памяти уменьшается и потребляемая мощность.
Краткое описание чертежей
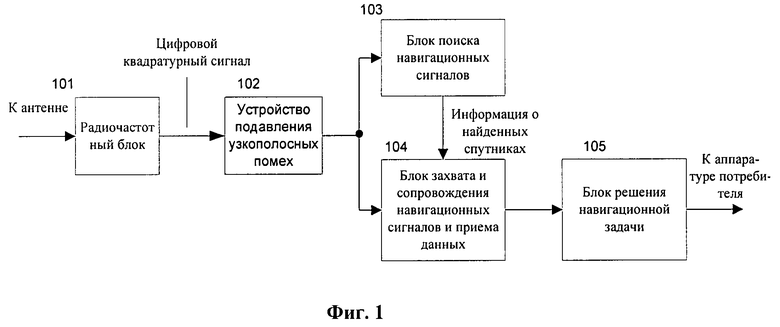
На фиг.1 приведена структурная схема спутникового навигационного приемника, использующего устройство подавления помех. Спутниковый приемник содержит радиочастотный блок (101), устройство подавления узкополосных помех (102), блок поиска навигационных сигналов (103), блок захвата и сопровождения навигационных сигналов и приема данных (104), блок решения навигационной задачи (105).
На фиг.2 приведена структурная схема устройства подавления помех в спутниковом навигационном приемнике, которая содержит анализатор спектра (201), первый модуль ДПФ (202), блок выделения помех (203), блок режекции помех (204), второй модуль ДПФ (205), модуль ОДПФ (206), сумматор с инвертирующим и неинвертирующим входами (207), блок памяти (208).
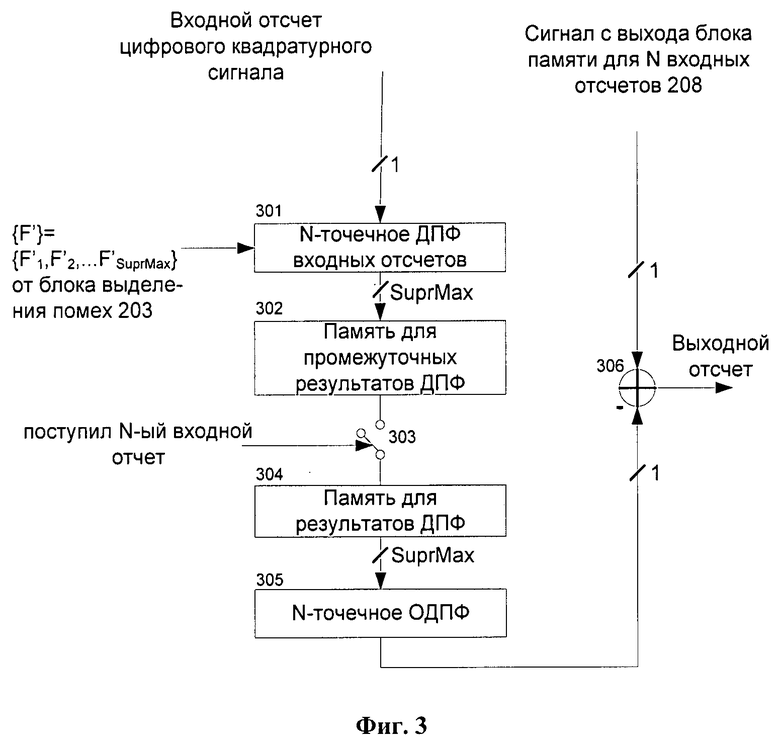
На фиг.3 приведена структурная схема блока режекции помех, которая содержит блок N-точечного ДПФ входных отсчетов (301), блок памяти для промежуточных результатов ДПФ (302), переключатель (303), блок памяти для результатов ДПФ (304), блок N-точечного ОДПФ (305), блок сумматора с инвертирующим и неинвертирующим входами (306).
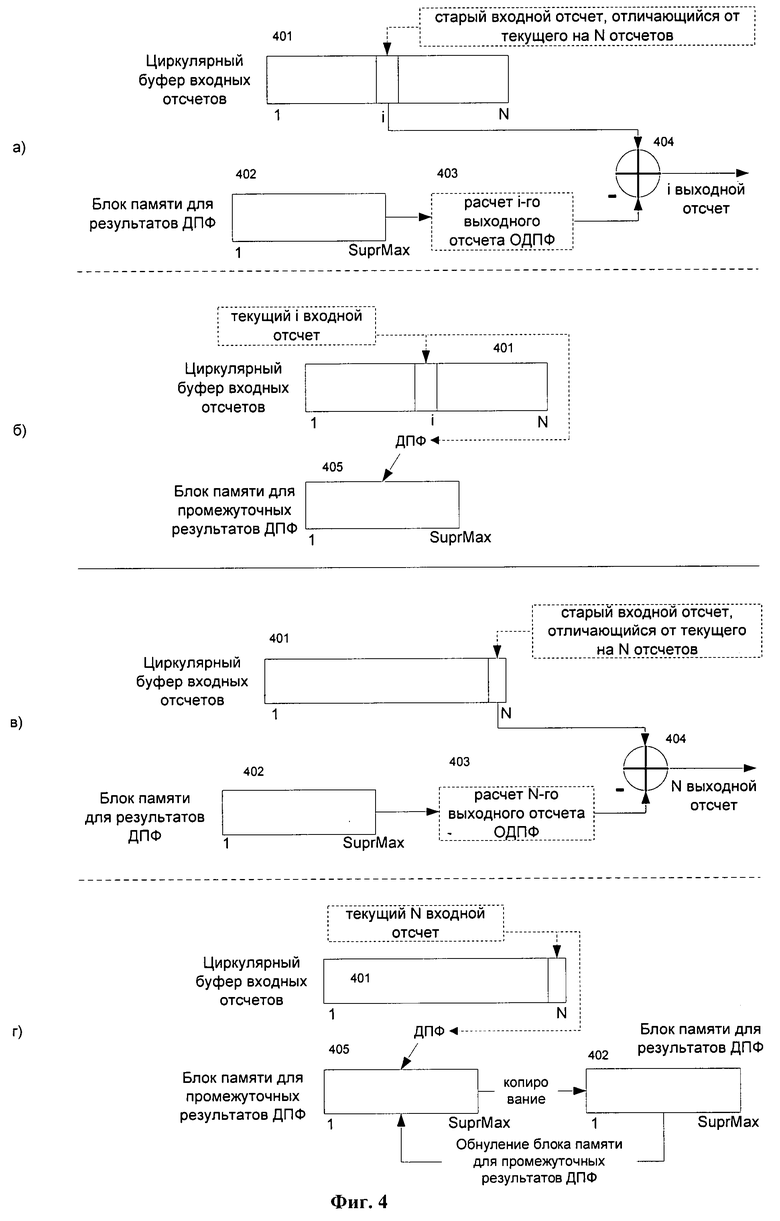
Фиг.4 иллюстрирует работу устройства подавления помех для варианта реализации, когда ДПФ и ОДПФ выполняются по мере поступления входных отсчетов. Обозначения: циркулярный буфер входных отсчетов (401), блок памяти для результатов ДПФ (402), блок N-точечного ОДПФ (403), сумматор с инвертирующим и неинвертирующим входами (404), блок памяти для промежуточных результатов ДПФ (405).
Осуществление изобретения
Фиг.1 поясняет использование предлагаемого устройства подавления помех в спутниковом навигационном приемнике. Входной сигнал из антенны, содержащий смесь полезного навигационного сигнала, широкополосного шума входных цепей приемника и узкополосных помех, поступает в радиочастотный блок (101), где усиливается, преобразуется в квадратурный сигнал на нулевой частоте и подвергается аналого-цифровому преобразованию. На выходе радиочастотного блока получается цифровой квадратурный сигнал, который подается на вход устройства подавления узкополосных помех (102). В качестве этого устройства используется предлагаемое изобретение. На выходе устройства подавления узкополосных помех получается навигационный сигнал, очищенный от узкополосных помех, который далее подается на блок поиска навигационных сигналов (103). Блок поиска обнаруживает сигналы тех спутников, которые «видимы» в точке размещения антенны приемника и уровень сигнала которых достаточен для их приема, оценивает параметры этих сигналов (доплеровское смещение, время прихода, уровень сигнала) и полученную информацию передает блоку захвата, сопровождения и приема данных (104). Блок (104) на основе информации, полученной от блока поиска (103), осуществляет точный захват сигналов «видимых» спутников, в дальнейшем их сопровождает и извлекает данные из сигнала спутника и передает эти данные в блок решения навигационной задачи (105), который по этим данным и другой имеющейся информации решает навигационную задачу и определяет координаты и скорость объекта, на котором расположен приемник. Навигационные данные с выхода блока решения навигационной задачи поступают в аппаратуру потребителя.
Фиг.2 поясняет работу предлагаемого устройства подавления узкополосных помех в спутниковом навигационном приемнике. Цифровой квадратурный сигнал с выхода радиочастотного блока поступает в блок анализатора спектра (201), который выполняет преобразование сигнала из временной области в частотную область. Для этого первый модуль ДПФ (202) вычисляет в реальном времени ДПФ входного сигнала для некоторого набора частот {F}={F1, F2, …, FScanMax}, являющихся частотными бинами N-точечного ДПФ, причем ScanMax меньше длины ДПФ N, а набор частот {F} после каждого вычисления ДПФ изменяется таким образом, что за N/FScanMax итераций перебираются все N частотных бинов. Если отношение N/FScanMax оказывается не целым, то его округляют до ближайшего большего целого числа.
Результат вычисления ДПФ передается в блок выделения помех (203). Блок выделения помех хранит результаты ДПФ для всех N частотных бинов, определяет наличие узкополосных помех посредством сравнения амплитуды выхода ДПФ с порогом и формирует набор частот 
В блоке режекции помех выполняется подавление узкополосных помех, соответствующих набору частот {F'}. Для этого входной отсчет цифрового квадратурного сигнала поступает на вход второго модуля ДПФ (205). Также в блок второго модуля ДПФ поступает управляющий сигнал, который задает набор частот, соответствующих узкополосным помехам, для которых выполняется ДПФ: 

Результаты с выхода второго модуля ДПФ (205) используются блоком ОДПФ (206), выполняющим ОДПФ для SuprMax ненулевых входных элементов {F'}. Результат выполнения ОДПФ можно представить следующей формулой:

Как следует из этого выражения, суммирование выполняется по небольшому числу SuprMax индексов k, за счет чего происходит экономия вычислений.
Сигнал c(n) является задержанной относительно входного сигнала оценкой узкополосных помех во временной области. Сигнал c(n) оценки узкополосных помех во временной области с выхода ОДПФ (206) поступает на инвертирующий вход сумматора (207), на неинвертирующий вход которого поступает отсчет с выхода блока памяти (208). В сумматоре происходит вычитание сигнала оценки помех из задержанного входного сигнала, вследствие чего осуществляется подавление узкополосных помех. В результате вычитания формируется выходной отсчет блока режекции помех.
Структурная схема блока режекции помех для одного из вариантов реализации показана на Фиг.3. На вход блока режекции помех поступают входные отсчеты, представляющие собой дискретные выборки из принятого сигнала. Кроме того, на вход блока режекции помех поступают отсчеты с выхода блока памяти для N входных отсчетов (208), где N соответствует длине ДПФ. Память реализована в виде циркулярного буфера таким образом, что i-й отсчет сохраняется на месте отсчета, поступившего на N отсчетов ранее него.
Входной отсчет цифрового квадратурного сигнала поступает на вход блока N-точечного ДПФ (301). Также в блок N-точечного ДПФ поступает управляющий сигнал, который задает набор частот, соответствующих узкополосным помехам, для которых выполняется ДПФ: 
При поступлении каждого входного отсчета выполняется частичный расчет ДПФ, т.е. расчет произведений для данного входного отсчета, затем эти произведения аккумулируются в блоке памяти для промежуточных результатов ДПФ (302). При поступлении N-го входного отсчета заканчивается расчет ДПФ и замыкается переключатель (303). Данные из блока памяти для промежуточных результатов (302) копируются в блок памяти для результатов ДПФ (304). После копирования данные в блоке памяти для промежуточных результатов ДПФ (302) обнуляются. Данные из блока памяти для результатов ДПФ (304) используются блоком N-точечного ОДПФ (305), выполняющего ОДПФ для SuprMax ненулевых входных элементов {F'}.
Сигнал c(n) оценки узкополосных помех во временной области с выхода ОДПФ (305) поступает на инвертирующий вход сумматора (306), на неинвертирующий вход которого поступает отсчет x(n-N) с выхода блока памяти (208). В сумматоре происходит вычитание сигнала оценки помех из задержанного входного сигнала, вследствие чего осуществляется подавление узкополосных помех. В результате вычитания формируется выходной отсчет блока режекции помех х(n-N)-c(n), отстающий от текущего входного отсчета на N отсчетов.
Для снижения аппаратной стоимости модуля ДПФ и ОДПФ можно выполнить с помощью таблиц соответствия или look up table (LUT). Таблица соответствия (LUT) содержит заранее рассчитанные величины 
Обработка каждого входного отсчета в реальном времени показана на фиг.4. Фиг.4а и 4б показывают обработку i-го входного отсчета.
Фиг.4а показывает, что при поступлении входного отсчета старый входной отсчет (отсчет, отстающий на N отсчетов от текущего входного отсчета) подается на неинвертирующий вход сумматора (404), а на инвертирующий вход подается сигнал с выхода ОДПФ (403). Выход ОДПФ формируется при каждом новом входном отсчете, используя заполненный ранее блок памяти с результатами ДПФ (402).
Из фиг.4б видно, что текущий входной отсчет сохраняется в блоке памяти входных отсчетов, реализованном в виде циркулярного буфера (401), длина которого равна длине ДПФ N. Этот же отсчет подается в блок ДПФ, где на его основе частично вычисляется ДПФ для определенного набора частот {F'}. Промежуточный результат ДПФ аккумулируется в блоке памяти для промежуточных результатов ДПФ (405).
Фиг.4в и 4г показывают обработку N-го входного отсчета.
Фиг.4в показывает обработку последнего отсчета (аналогично фиг.4а).
Фиг.4г показывает, что при поступлении N-го входного отсчета результаты ДПФ полностью сформированы, поэтому они копируются из блока памяти для промежуточных результатов ДПФ (405) в блок памяти для результатов ДПФ (402), данные из которой далее будут использоваться для расчета ОДПФ (403). После копирования память для промежуточных результатов ДПФ (405) обнуляется.
Реализация предлагаемого изобретения может быть выполнена на основе известных элементов цифровой техники (блоков памяти, сумматора, LUT), среди которых основное место занимают блоки, реализующие ДПФ и ОДПФ. ДПФ (ОДПФ) является известным алгоритмом, способы реализации которого известны из литературы (см., например, Shoab Ahmed Khan "Digital Design of Signal Processing Systems", Wiley, 2011 p.292-296). Таким образом, реализация данного изобретения не представляет проблемы.
Источники информации
1. US 6448925 В1 Jamming detection and blanking for GPS receivers.
2. US 4613978 Narrowband interference suppression system.
3. US 5263048 Narrow band interference frequency excision method and means.
4. US 6477196 B1 Direct sequence spread spectrum communications receiver and method for efficient narrow-band signal excision.
5. US 5268927 Digital adaptive transversal filter for spread spectrum receivers.
6. US 7453921 B1 LPC filter for removing periodic and quasi-periodic interference from spread spectrum signals.
7. Ying-Ren Chien et al., "A novel continuous wave interference detectable adaptive notch filter for GPS receivers". 2010 IEEE Global Telecommunications Conference, Miami, 2010.
8. US 5612978 Method and apparatus for real-time adaptive interference cancellation in dynamic environments.
9. US 6219376 Apparatuses and methods of suppressing a narrow-band interference with a compensator and adjustment loops
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ПОДАВЛЕНИЯ ПОМЕХ | 2011 |
|
RU2456743C1 |
| СПОСОБ ПРОГРАММНОЙ ОБРАБОТКИ БУФЕРИЗОВАННЫХ ВЫБОРОК ОЦИФРОВАННЫХ СИГНАЛОВ И МУЛЬТИСИСТЕМНЫЙ МНОГОКАНАЛЬНЫЙ ПРОГРАММНЫЙ ПРИЕМНИК РЕАЛЬНОГО ВРЕМЕНИ СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И СИСТЕМ ИХ ПОДДЕРЖЕК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2336631C2 |
| РАДИОМОДЕМ | 2010 |
|
RU2460215C1 |
| ПРИЕМНИК СЛОЖНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ С ПОДАВЛЕНИЕМ УЗКОПОЛОСНЫХ ПОМЕХ | 2003 |
|
RU2249913C1 |
| СПУТНИКОВЫЙ НАВИГАЦИОННЫЙ ГЛОНАСС/GPS/GALILEO-ПРИЕМНИК С КОРРЕЛЯТОРАМИ, АСИНХРОННО УПРАВЛЯЕМЫМИ ВНЕШНИМ ПРОЦЕССОРОМ | 2010 |
|
RU2456630C1 |
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2042151C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПОМЕХ ДЛЯ ПРИЕМНИКОВ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 1999 |
|
RU2154341C1 |
| Способ обработки шума клиппирования для снижения пик-фактора OFDM сигналов и устройство для его реализации | 2024 |
|
RU2835883C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
Изобретение относится к области радиоэлектроники и может быть использовано в качестве экономичного средства подавления узкополосных помех на входе навигационного приемника сигналов от спутников ГЛОНАСС, GPS, Galileo и Compass. Технический результат заключается в возможности создания экономичного средства подавления узкополосных помех в условиях наличия большого числа нестабильных узкополосных помех, с использованием небольших аппаратных ресурсов и вычислительных затрат без пиковых нагрузок, а также повышает надежность своевременного определения узкополосных помех за счет постоянного сканирования сигнала на наличие этих помех. Устройство подавления помех содержит анализатор спектра, включающий первый модуль дискретного преобразования Фурье (ДПФ), блок выделения узкополосных помех, блок режекции узкополосных помех, включающий второй модуль ДПФ, к выходу которого подключен модуль обратного ДПФ, а также сумматор, между входом анализатора и неинвертирующим входом сумматора включен блок памяти, а выход блока режекции подключен к инвертирующему входу сумматора. 3 з.п.ф-лы, 4 ил. 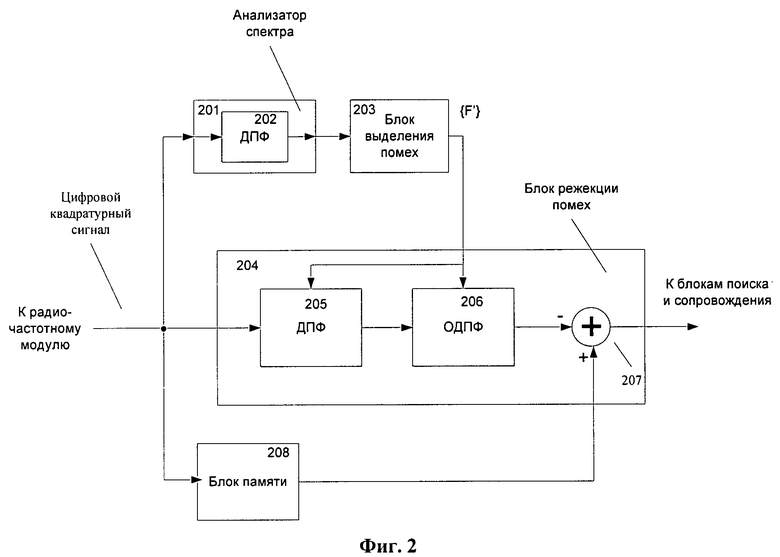
1. Устройство подавления узкополосных помех в спутниковом навигационном приемнике, содержащее анализатор спектра, блок выделения узкополосных помех, блок режекции помех, при этом вход устройства подавления узкополосных помех соединен с входом анализатора спектра и с первым входом блока режекции помех, выход анализатора спектра соединен с входом блока выделения помех, выход блока выделения помех соединен со вторым входом блока режекции помех, при этом выход блока режекции помех является выходом устройства подавления узкополосных помех,
отличающееся тем, что добавлен блок памяти для хранения входных отсчетов, причем вход устройства подавления узкополосных помех соединен с входом блока памяти, а выход блока памяти соединен с третьим входом блока режекции помех,
тем, что блок анализатора спектра содержит первый модуль дискретного преобразования Фурье (ДПФ), вход и выход которого соединены соответственно с входом и выходом блока анализатора спектра, вычисляющий ДПФ входного сигнала для некоторого набора частот {F}={F1, F2, …, FScanMax}, являющихся частотными бинами N-точечного ДПФ, причем ScanMax меньше длины ДПФ N, а набор частот {F} после каждого вычисления ДПФ изменяется таким образом, что за n/FScanMax итераций перебираются все N частотных бинов,
тем, что блок выделения узкополосных помех формирует набор 
тем, что блок режекции помех содержит второй модуль ДПФ, вычисляющий ДПФ входного сигнала для набора частот 
тем, что блок режекции помех содержит модуль N-точечного обратного ДПФ (ОДПФ), при этом выход второго модуля ДПФ соединен с первым входом модуля ОДПФ, а второй вход модуля ОДПФ соединен со вторым входом блока режекции помех, причем N-точечное ОДПФ выполняется для SuprMax ненулевых входных элементов {F'},
тем, что блок режекции помех содержит сумматор с инвертирующим и неинвертирующим входами, при этом выход блока ОДПФ соединен с инвертирующим входом сумматора, а его неинвертирующий вход соединен с третьим входом блока режекции помех, а выход сумматора является выходом блока режекции помех.
2. Устройство подавления узкополосных помех в спутниковом навигационном приемнике по п.1, отличающееся тем, что ДПФ и ОДПФ реализуются с помощью таблиц соответствия (LUT).
3. Устройство подавления узкополосных помех в спутниковом навигационном приемнике по п.2, отличающееся тем, что блок памяти для входных отсчетов реализован в виде циркулярного буфера, длина которого равна длине ДПФ N,
тем, что N-точечное ДПФ в первом и втором модуле ДПФ вычисляются по мере поступления входных отсчетов на вход блока памяти для хранения входных отсчетов, постепенно формируя результаты для ScanMax и SuprMax частотных бинов, для хранения которых в каждом модуле ДПФ содержатся блоки памяти для промежуточных результатов ДПФ на ScanMax и SuprMax элементов соответственно, причем выходы первого и второго блока ДПФ соединены со входами соответствующих блоков памяти,
тем, что N-точечное ОДПФ вычисляется по мере поступления входных отсчетов на вход блока памяти для хранения входных отсчетов и содержит блок памяти для хранения результатов ДПФ для SuprMax частотных бинов, используемых модулем ОДПФ в качестве входных параметров, причем вход блока памяти для хранения результатов ДПФ соединен с входом модуля ОДПФ,
тем, что выход блока памяти для промежуточных результатов второго модуля ДПФ и вход блока памяти для хранения результатов ДПФ связаны между собой через переключатель.
4. Устройство подавления узкополосных помех в спутниковом навигационном приемнике по п.3,
отличающееся тем, что при поступлении нового входного отсчета в блок памяти для хранения входных отсчетов из циркулярного буфера вычитывается входной отсчет, поступивший на N тактов ранее вновь прибывшего,
причем при поступлении N-го входного отсчета вычисление N-точечного ДПФ в первом и втором модуле ДПФ завершается и промежуточные результаты ДПФ второго модуля копируются в блок памяти для результатов ДПФ модуля ОДПФ, после чего блок памяти для промежуточных результатов ДПФ в обоих модулях ДПФ обнуляется.
| US 6477196 B1, 05.11.2002 | |||
| US 5268927 A, 07.12 | |||
| Способ изготовления фанеры-переклейки | 1921 |
|
SU1993A1 |
| US 5263048 A, 16.11 | |||
| Способ изготовления фанеры-переклейки | 1921 |
|
SU1993A1 |
| СПОСОБ КОМПЕНСАЦИИ УЗКОПОЛОСНЫХ ПОМЕХ | 2004 |
|
RU2269201C2 |
| Предохранитель искусственного коленного сустава в протезах для нижних конечностей | 1948 |
|
SU76185A1 |

